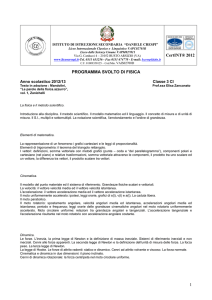
Posizione di un punto nello spazio
La posizione di un punto materiale nello spazio viene
individuata mediante il vettore posizione (o raggio vettore)
che congiunge l’origine del sistema di riferimento con il
punto materiale.
In coordinate cartesiane:
r xiˆ yˆj zkˆ
z
P
r
O
x
y
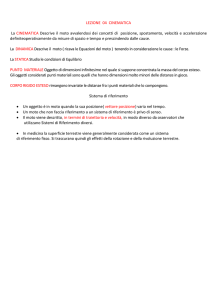
Spostamento e velocità media
P1 = posizione del corpo all’istante t1
P2 = posizione del corpo all’istante t2=t1+Δt
Spostamento: Δr r2 r1 (x 2 iˆ y 2 ˆj z 2 kˆ) (x 1 iˆ y1 ˆj z1 kˆ)
(x x )iˆ (y y )ˆj (z z )kˆ Δxiˆ Δyˆj Δzkˆ
2
1
2
2
1
Velocità vettoriale media:
z
P1
r1
Δr
P2
r2
O
x
1
Δr Δx ˆ Δy ˆ Δz ˆ
vM
i
j
k
Δt Δt
Δt
Δt
La velocità media ha la stessa
y direzione dello spostamento!
Velocità vettoriale istantanea
La velocità istantanea è definita partendo dalla velocità media
e considerandone il limite per Δt→0:
Δr dr dx ˆ dy ˆ dz ˆ
v lim v M lim
i
j k
Δt 0
Δt 0 Δt
dt dt
dt
dt
Le componenti del vettore velocità sono dunque:
dx
vx
dt
dy
vy
dt
dz y
vz
dt
Per Δt→0 la direzione dello
spostamento tende ad essere
tangente alla traiettoria
Il vettore velocità istantanea
è tangente alla traiettoria
Δr Δr
r(t)
O
Δr
r(t+Δt)
r(t+Δt)
r(t+Δt)
x
Accelerazione
Siano v1 e v2 le velocità del punto materiale agli istanti di tempo
t1 e t2=t1+Δt
v 2 v 1 Δv
Accelerazione media: a M
t 2 t1
Δt
Accelerazione istantanea:
v (t Δt) v (t) dv
a lim a M lim
Δt 0
Δt 0
Δt
dt
dv x d 2 x
ax
2
dt
dt
d2y
ay
2
dt
dt
dv y
dv z d 2 z
az
2
dt
dt
In generale il vettore a avrà una componente parallela alla
traiettoria (accelerazione tangenziale) ed una componente
perpendicolare alla traiettoria (accelerazione normale)
Moto balistico
Consideriamo una particella che si muove in 2 dimensioni con
velocità iniziale v0 e accelerazione di gravità g costante
y
2
g g ˆj (g 9,8m/s )
g
v0
v0y
y0
O
Posizione iniziale: (x0 , y0 )
θ0
v0x
Velocità iniziale:
v0x v0 cos θ0
v0y v0 sin θ0
x
x0
Il moto orizzontale ed il moto verticale sono indipendenti:
asse x: moto rettilineo uniforme con velocità v0x
asse y: moto uniformemente accelerato con velocità iniziale
v0y e accelerazione -g
Equazioni del moto balistico
Asse x:
x x0 v0x t x x0 v0 cosθ0 t
v x v0 cosθ0
Asse y:
1 2
1 2
y y0 v0y t gt y y0 v0 sinθ0 t gt
2
2
v y v0 sinθ0 - gt
Equazione della traiettoria:
x x0
t
v 0 cosθ0
1 (x x0 )2
y y0 tgθ0 (x x0 ) g 2 2
2 v0 cos θ0
La traiettoria è un arco di parabola con concavità verso il basso
Gittata orizzontale
Consideriamo il caso di un proiettile che parte dall’origine del
sistema di riferimento (x0=0, y0=0):
1
x2
Traiettoria: y tgθ0 x g 2
2 v0 cos 2 θ0
y
1
x
0
y 0 x tgθ0 g 2
2
2 v0 cos θ0
2v02
v02
x 0 x
sinθ0 cosθ0
sin2θ0
g
g
La gittata è massima per θ0=45°
Formule valide solo se la quota di
arrivo è uguale a quella di partenza!
O
xG
x
Punto di massima altezza
y
yH
H
y0
O
x0
xH
x
v0 sinθ0
v sinθ0 gt 0 t
Nel punto di altezza massima vy=0: 0
g
v02 sinθ0 cosθ0
x H x0 v0 cosθ0 t x0
g
v02 sin2θ0
1 2
y H y0 v0 sinθ0 t gt y0
2
2g
Moto circolare uniforme
La traiettoria è una circonferenza
La velocità è costante in modulo (ma non in direzione e verso!)
2πR
Periodo: T
v
v(t)
v t
α
R
v(t)
α
Δv
v(t+Δt)
v(t+Δt)
α
Δv 2vsin
2
R
α
O
Accelerazione centripeta
v Δt
v Δt
2vsin
2 sin
Δv
v
2R
2R
vΔ t
Δt
Δt
R
2R
v(t)
Δv v 2
a lim
Δt 0 Δt
R
v(t)
α
β
Δv
v(t+Δt)
v(t+Δt)
α
a
O
π
Δt 0 α 0 β
2
Δv e v perpendicolari
a diretto verso il centro
L’accelerazione è centripeta
ed in modulo vale v2/R