1
2
3
4
5
6
7
8
9
10
CAMPO ROTANTE: ORIGINE E VISUALIZZAZIONE TRAMITE DIAGRAMMA DI FMM
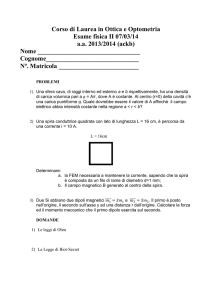
Si consideri un avvolgimento in doppio strato con p =4, m =3, q =2, accorciamento = 1, alimentato da un sistema
trifase equilibrato di correnti sinusoidali di sequenza diretta e pulsazione .
Si vuole disegnare il diagramma di fmm in 4 istanti di tempo, distanti di 30° elettrici.
=A
=B
=C
Per le fmm, si assuma come riferimento spaziale la
θ
posizione del primo conduttore della fase a, e si ruoti in
senso orario (=> nel diagramma di fmm, si sale con e si
scende con ). Per le correnti, si assuma come istante t = 0
Im
i
(t)
2
Icos(ω
t)
l’istante in cui è massima la corrente nella fase a, per cui le
a
Ic
espressioni nel tempo sono quelle indicate. Considerando i
Ia ib (t) 2 Icos(ω t 2 π)
fasori, essi (come sempre) ruotano in senso antiorario a
3
Re
4
velocità pari alla pulsazione elettrica , e nell’istante t = 0 il
ic (t) 2 Icos(ω t π)
Ib
fasore corrente della fase a sta sull’asse reale.
3
t=0
h
4
Ic
3
Ia
2
Re
U h 0
Ib
U.faseA h 0
1
0
1
ia = 1
ib = ic = -1/2
2
3
|ia| = 1
|ib| =| ic| = 1/2
4
t = (/6) /
3
4
5
6
7
h
8
9
10
11
12
13
3
Re
Ib
ia = 3/2
2
U h 30
U.faseA h 30
ib = 0
ic = -3/2
1
0
1
2
3
|ia| =| ic| = 3/2
4
t = (/3) /
4
Ia
3
Ic
2
4
Ia
Ic
1
1
2
3
4
5
6
7
h
8
9
10
11
12
13
2
Re
Ib
U h 60
U.faseA h 60
ia = 1/2
ib = 1/2
ic = -1
1
0
1
2
3
|ic| = 1
|ib| =| ia| = 1/2
t = (/2) /
4
1
2
3
4
5
6
7
h
8
9
10
11
12
13
4
3
Ia
2
Ic
Ib
Re
ia = 0
ib = 3/2
ic = -3/2
|ib| =| ic| = 3/2
U h 90
U.faseA h 90
1
0
1
2
3
4
1
2
3
4
5
6
7
h
8
9
10
11
12
13
11
Dai grafici si vede che il diagramma di fmm della fase A cambia di ampiezza, ma non si sposta (l’asse magnetico della
fase A è fisso sulla cava 4): per questo viene chiamato campo pulsante. Invece, il diagramma di fmm risultante cambia
leggermente di ampiezza, e si sposta (l’asse magnetico si sposta): il campo magnetico ruota dunque nel traferro. In
particolare, si osserva che lo spostamento è pari all’angolo elettrico di cui rotano i fasori corrente. Nell’esempio, i fasori
ruotano di 30° elettrici, e l’asse magnetico si sposta di una cava, che corrisponde ad un angolo di 360° meccanici / 24
cave = 15° meccanici, ossia 15*p/2 = 15*2 = 30° elettrici. Quindi, la velocità di rotazione del campo è pari alla
pulsazione elettrica della corrente.
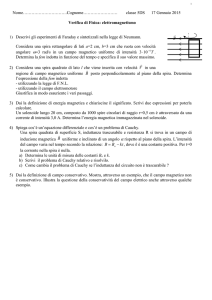
Si consideri ora un altro esempio. L’avvolgimento sia trifase (cioè, formato da 3 avvolgimenti monofasi, i cui assi
magnetici sono sfasati di 2/3 nello spazio) distribuito (ma per semplicità si rappresenta l’avvolgimento con una sola
bobina); le fasi si susseguano in senso antiorario, in modo che se sono percorse da un sistema trifase equilibrato di
corrente di sequenza diretta, il campo ruoti in senso antiorario (cioè il campo ruota nello stesso senso dei fasori elettrici);
sempre per semplicità, la macchina sia a 2 poli. In pratica, è come considerare un avvolgimento con p = 2, m = 3, q = 1 (c
= 6), e spostarsi lungo la periferia in senso antiorario.
b
Per le fmm, si assuma come riferimento spaziale l’asse
a
magnetico della fase a, per cui gli angoli vengono computati
Im
ia (t) 2 Icos(ω t)
θ
a partire da questo riferimento, e si ruoti in senso antiorario
Ic
2
Ia
ib (t) 2 Icos(ω t π)
a
(nel diagramma di fmm, si scende con e si sale con ).
3
Re
b
c
Per le correnti, ci si comporta come prima (l’istante t = 0 è
4
ic (t) 2 Icos(ω t π)
Ib
quello in cui è massima la corrente nella fase a).
3
c
Inoltre, l’asse Reale del piano complesso è posizionato parallelo all’asse magnetico della fase a, in modo che coincidono
i due riferimenti (quello spaziale dei vettori spaziali e quello temporale dei fasori elettrici).
Ripetendo il tracciamento del diagramma di fmm, si ritrova che l’onda di fmm (l’onda effettiva a gradini, o la sua prima
armonica) ruota alla stessa velocità dei fasori elettrici. Se si rappresenta poi l’andamento istantaneo delle linee di campo,
anche questa modalità di visualizzazione conferma che il campo ruota, alla velocità .
t = 0 => mtri( , t)= cosθ
1
Ic
Ia
1/2
1/2
m(θ)
θ
=0
Re
Ib
t=0
ia = 1
ib = ic = -1/2
1/2
Ia
Ic
Re
Ib
t = (/6) /
ia = 3/2 ib = 0
ic = -3/2
Ia
Ic
1/2
1
3/2
0
0
3/2
1
1/2
t = (/2) /
ia = 0 ib = 3/2
ic = -3/2
M
θ
t =(/3) / =>
mtri( , t)= cos(θ - /3 )
θ
M = π/3
m(θ)
1
1/2
Re
= π/6
m(θ)
= π/6
1/2
Ia
Ib
θ
3/2
Re
Ic
t =(/6) / =>
mtri( , t)= cos(θ - /6 )
3/2
Ib
t = (/3) /
ia = 1/2 ib = 1/2
ic = -1
M
θ
=0
3/2
0
θ
M
t =(/2) / =>
mtri( , t)= cos(θ - /2 )
0
3/2
3/2
=π/3
1/2
3/2
θ
= π/2
m(θ)
=π/2
θ
In modo sintetico, il campo può essere rappresentato con un vettore spaziale M che
ha direzione e verso dell’asse
magnetico del campo; in altre parole, la direzione ed il verso del vettore spaziale M si ottengono considerando il verso
istantaneo delle correnti, ed applicando la regola della mano destra. Si osservi che la fase del massimo
dell’onda di fmm
coincide con la fase spaziale dell’asse magnetico del campo, quindi con la fase del vettore spaziale M . Si osservi anche
che con le convenzioni assunte (campo e fasori elettrici ruotano nello stesso senso antiorario, il riferimento spaziale per la
fmm è l’asse magnetico della fase a, l’asse Reale del piano complesso è in fase con il riferimento
spaziale, l’istante t = 0
è quello in cui è massima la corrente nella fase a) si ha che la fase spaziale del vettore M (nel piano assialedella
macchina) coincide con la fase del fasoreIa (nel
piano complesso). Si definisce allora un vettore spaziale I , che
riassume le caratteristiche del vettore spaziale M e del fasore correnteIa e che viene chiamato “vettore di Park”. 12
CAMPO ROTANTE: TRATTAZIONE ANALITICA
Analizzando il diagramma di fmm prodotto dagli avvolgimenti distribuiti si è constatato che un avvolgimento trifase,
percorso da un sistema di correnti trifase simmetrico, genera un campo rotante. Si effettua ora una trattazione rigorosa per
giungere all’espressione di un campo rotante.
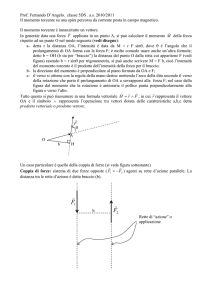
STRUTTURA MECCANICA. Si consideri la struttura tipica di una macchina rotante isotropa: due cilindri
ferromagnetici, uno pieno (raggio Rp) e l’altro cavo (raggio interno Rc), il cilindro pieno avente raggio poco inferiore al
cilindro cavo (Rp ≈ Rc, Rp < Rc), in modo che se vengono messi uno interno all’altro e coassiali, sono separati solo da un
piccolo spessore d’aria, che prende il nome di traferro . Le superfici prospicienti al traferro sono dotate di cave, per
alloggiare i conduttori elettrici che poi vengono collegati fra loro per creare l’avvolgimento.
Si consideri per semplicità una macchina a 2 poli, per cui non c’è distinzione fra angoli elettrici e meccanici.
δ
δ
Rc
Rp
CAMPO PRODOTTO DA UN AVVOLGIMENTO MONOFASE.
Si è visto che in un avvolgimento monofase la fmm al
m(θ) = MM.mono cos(θ)
traferro ha una distribuzione spaziale a gradini.
Sviluppando con Fourier, la 1° armonica ha espressione
m( ) = MM.mono cos( ) .
θ
Se la corrente è costante nel tempo, il campo ha ampiezza
MM.mono
costante nel tempo, e varia sinusoidalmente nello spazio.
NOTA: la coordinata ruota in senso
Si può rappresentare tale campo in 3 modi:
antiorario => nel diagramma di fmm,
con l’onda di fmm, con le linee di campo, con un vettore
si scende con e si sale con
M rappresentativo dell’asse magnetico del campo.
θ
M
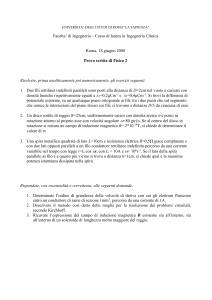
CAMPO ROTANTE ottenuto per ROTAZIONE DELLA STRUTTURA CHE GENERA UN CAMPO COSTANTE.
Se la corrente è costante nel tempo e la struttura ruota, un osservatore fisso vede il campo ruotare e l’onda m( )traslare.
In particolare, se la struttura ruota a velocità + (cioè ruota nel verso dei positivi), l’onda trasla verso destra.
Si è quindi ottenuto un campo rotante, facendo ruotare meccanicamente un campo fisso.
Assumendo come riferimento l’asse orizzontale, la posizione angolare della struttura rotante è, istante per istante, = t.
t = t2 => = t2 = 90°
t = t1 => = t1 = 45°
t = t0 => = t0 = 0
θ
=0
m(θ)
= 45° θ
θ
= 90° θ
m(θ)
= 45°
θ
m(θ)
= 90°
θ
CAMPO PULSANTE. Si considerino le strutture di prima, e si supponga che tutto sia fermo, ma la corrente vari
sinusoidalmente nel tempo: i(t) = 2 I cos( t). L’espressione del campo risulta m(, t) = MM.mono cos() cos( t )
Valutando questa espressione in due istanti di tempo generici t1 e t2 , si hanno due campi sinusoidali nello spazio,
con gli stessi punti di zero, ma con ampiezza diversa:
t1
m(θ)
t = t1 => m( , t1) = MM1.mono cos( ) cos( t1 )
t2
t = t2 => m( , t2) = MM2.mono cos( ) cos( t2 )
Quindi MM.mono cos( ) cos( t) è l’espressione di un campo fisso nello
θ
spazio (non trasla), con andamento spaziale sinusoidale, e ampiezza
t3
variabile sinusoidalmente nel tempo: si parla di CAMPO PULSANTE.
CAMPI CONTROROTANTI. Si applichino ora le formule di Prostaferesi all’espressione del campo pulsante:
cos( ) cos( t) = ½ [ cos( t + ) + cos( t - )]. Cosa rappresentano i due termini cos( t )?
Si consideri per es. cos( t + ) e lo si valuti in tre istanti t = 0, t = t1 , t = t2 : si vede che l’onda sta traslando.
Ma se l’onda trasla, il campo ruota => cos( t + ) è l’espressione di un campo rotante. La velocità di rotazione è ,
cioè coincide con la pulsazione della corrente (in realtà la velocità è - , perché l’onda sta traslando verso sinistra, cioè
nel verso dei < 0 ).
Analogamente, cos( t - ) è un campo rotante a velocità è (onda trasla verso destra, cioè nel verso dei > 0 ).
Quindi un campo pulsante è dato dall’insieme di 2 campi controrotanti, di velocità pari alla pulsazione della corrente, e
di ampiezza metà del campo pulsante.
NOTA: si osservi che il massimo dell’onda è posizionato, istante per istante, in = t.
13
t = t1 => cos(θ + t1 )
t = t0 => cosθ
m(θ)
t = t2 => cos(θ + t2 )
m(θ)
m(θ)
θ
= t1
θ
= t2
θ
CAMPO ROTANTE TRIFASE. Si intuisce allora che un campo rotante si può ottenere senza rotazione meccanica, ma
semplicemente con una corrente sinusoidale. Si osserva però che nella struttura precedente si hanno 2 campi
controrotanti, che componendosi danno un campo pulsante => per avere un solo campo rotante, occorre eliminarne uno.
Si considerino le condizioni già applicate precedentemente: un avvolgimento trifase (cioè, formato da 3 avvolgimenti
monofasi, i cui assi magnetici sono sfasati di 2/3 nello spazio) distribuito (ma per semplicità si rappresenta
l’avvolgimento con una sola bobina); le fasi si susseguono in senso antiorario; sempre per semplicità, la macchina sia a 2
poli. L’avvolgimento è percorso da un sistema trifase equilibrato di corrente di sequenza diretta e l’istante t = 0 è quello
in cui è massima la corrente nella fase a.
b
Per le fmm, si assuma come riferimento spaziale l’asse
a
magnetico della fase a, per cui gli angoli vengono computati
Im
ia (t) 2 Icos(ω t)
θ
a partire da questo riferimento, e si ruoti in senso antiorario.
Ic
2
Ia
ib (t) 2 Icos(ω t π)
a
Inoltre, l’asse Reale del piano complesso è posizionato
3
Re
b
c
parallelo all’asse magnetico della fase a, in modo che
4
ic (t) 2 Icos(ω t π)
Ib
coincidono i due riferimenti (quello spaziale dei vettori
3
c
spaziali e quello temporale dei fasori elettrici).
Si considerino i 3 campi pulsanti prodotti, e li si sovrapponga nello spazio.
1
Se, applicando le formule di
ma (θ,t) M M .mono cos(θ)cos(ωt) M M .mono cos(ωt θ) cos(ωt θ)
Prostaferesi, si effettua la
2
scomposizione di ciascun campo
2
2
1
4
mb (θ,t) M M .mono cos(θ π)cos(ωt π) M M .mono cos(ωt θ π) cos(ωt θ)
pulsante nei due campi controrotanti
3
3
2
3
componenti, si vede che i 3 campi
4
4
1
2
mc (θ,t) M M .mono cos(θ π)cos(ωt π) M M .mono cos(ωt θ π) cos(ωt θ)
inversi (rotanti con velocità - ) sono
3
3
2
3
costantemente a somma nulla, mentre i
3
3 campi diretti (rotanti a velocità )
mtri (θ,t) ma (θ,t) mb (θ,t) mc (θ,t) M M .mono cos(ωt θ) M M .t ri cos(ωt θ)
2
sono in fase fra loro => il risultato è un
unico campo rotante a velocità .
Si è quindi ottenuto un modo per generare un campo rotante a partire da una struttura fissa.
NOTA1: 3 correnti sfasate di (2/3)/ nel tempo sono le correnti caratteristiche di un sistema trifase simmetrico
equilibrato => per avere un campo rotante occorre avere tale sistema. In pratica, è sufficiente avere una macchina
costruttivamente simmetrica, perché se gli avvolgimenti sono uguali, le impedenze sono uguali e le fem indotte
costituiscono un sistema trifase di fem, e quindi il sistema di correnti è equilibrato.
NOTA2: Se, a parità di avvolgimenti, si scambiano fra loro le correnti di 2 fasi, nella
somma precedente hanno risultante nulla i 3 campi rotanti a velocità + => il campo
risultante ruota a - . Questo è il metodo per invertire la rotazione di un motore trifase.
NOTA3: La trattazione svolta è fatta per una macchina a 2 poli, per cui non c’è distinzione fra angoli elettrici e
meccanici. Se la macchina è a p poli, le cose cambiano notevolmente. In particolare, occorre considerare che in tutte le
espressioni scritte per la fmm o per l’induzione, l’angolo che compare è l’angolo elettrico e , perché il diagramma di
fmm è associato all’angolo elettrico; se interessa far comparire m , occorre sostituire e con m p / 2 .
Quindi, con le convenzioni assunte, l’espressione dell’andamento spaziale della fmm in funzione dell’angolo elettrico è
mtri(e , t) = MM.tri cos( t - e ) = MM.tri cos( t - m p / 2 )
con = pulsazione della corrente, m = angolo meccanico, e = m p / 2 = angolo elettrico.
NOTA4: La velocità di rotazione elettrica del campo è = θe , e la meccanica è = θ m = θe 2 / p = 2 / p [rad/s].
o
Tenendo conto che = 2f e che il legame fra [rad/s] e [giri/min] è 2/60, la velocità in [giri/min] è No = 120 f / p.
14
ESPRESSIONE GENERALE DEL VETTORE DI PARK. Considerando l’espressione della fmm trifase, si ha:
2
2
4
4
mtri (θ,t) ma (θ,t) mb (θ,t) mc (θ,t) M M .mono cos(θ) cos(ωt) cos(θ π) cos(ωt π) cos(θ π) cos(ωt π)
3
3
3
3
4
2
4
2
j θ- π
j θ- π
j - π
j - π
N Re e jθ ia + Re e 3 ib + Re e 3 ic N Re ia + e 3 ib + e 3 ic e jθ N Re ia + ib + 2 ic e jθ
jθ
j 2 π 3
L’espressione ia + ib + 2 ic , con e
, è appunto la forma generale del vettore di Park; il termine e dà la
rotazione spaziale, e l’operatore Re serve per passare dal vettore all’andamento spaziale.
NOTA: di solito si cambia segno all’argomento del coseno, cioè si pone cos( θ),cos( θ 2 π 3 ),cos( θ 4 π 3 ) , così si
j 2 π 3
ha ia + ib + 2 ic e jθ con e
NOTA SU SIGNIFICATO DEL VETTORE SPAZIALE M . Si osservi che in una macchina a 2 poli, la rappresentazione
vettoriale non è solo una comoda rappresentazione grafica, ma per un campo a distribuzione spaziale sinusoidale ha anche
un preciso valore quantitativo, che ora viene illustrato.
Mcos()
Nel caso di avvolgimento monofase, in cui il vettore M è fisso sull’asse dell’avvolgimento, presa
una qualsiasi posizione , la proiezione del vettore M sull’asse in posizione , dà l’ampiezza del
campo in quella posizione (perché la proiezione di un vettore su un asse è il modulo del vettore per il
coseno dell’angolo compreso fra il vettore e l’asse).
M
Nel caso di un avvolgimento polifase, si può dimostrare che la proiezione del vettore spaziale M sull’asse di una fase è
proporzionale al valore della corrente di quella fase nell’istante considerato.
RAPPRESENTAZIONE VETTORIALE DI CAMPO PULSANTE E CAMPO ROTANTE
CAMPO PULSANTE. Lo sviluppo analitico ha mostrato che
cos( ) cos( t) = ½ [ cos( t + ) + cos( t - )], cioè un campo pulsante è dato
dall’insieme di 2 campi controrotanti. Usando la rappresentazione vettoriale, si può dare
una semplice ed efficace rappresentazione grafica.
Assumendo come riferimento l’asse della bobina (in figura, l’asse orizzontale), il campo
cos( t + ) è un vettore (definito campo inverso M i ) di fase = - t = - , rotante a
Md
M -
i
-
-
ci
θ
M pulsante
velocità - , il campo cos( t - ) è un vettore (definito campo diretto M d ) di fase
= t = , rotante a velocità , i due campi sono sempre simmetrici (i vettori sono fra
ad b
d
loro coniugati), e componendosi danno un unico campo di fase 0 e ampiezza variabile
cd
(che è il campo pulsante).
ai
bi
CAMPO ROTANTE TRIFASE. Anche il campo rotante trifase può essere introdotto in
-
-
modo semplice ed efficace tramite la rappresentazione vettoriale.
Il campo cos( t - ) è un vettore di fase = t = , rotante a velocità ;
esistono 3 campi di questo tipo, che sono i 3 campi diretti ad, bd, cd delle 3 fasi;
questi campi sono costantemente in fase e si compongono dando un campo risultante di ampiezza tripla;
il campo cos( t + ) è il campo inverso ai della fase a: un vettore di fase = - t = - , rotante a velocità - ;
il campo cos( t + - 4π /3) è il campo inverso bi della fase b: un vettore di fase 4π /3 - , rotante a velocità - ;
il campo cos( t + - 2π /3) è il campo inverso ci della fase c: un vettore di fase 2π /3 - , rotante a velocità - ;
i 3 campi inversi sono costantemente sfasati di 120°, per cui la loro somma è costantemente nulla.
15
θ
ESPRESSIONE DELL’INDUZIONE B GENERATA DA UNA fmm AL TRAFERRO M.
Nell’ipotesi di permeabilità del ferro infinita, si può dare una semplice rappresentazione dell’induzione. Infatti:
∫ H dℓ = N i => HFe ℓFe + Ha ℓa = N i ;
Fe = ∞ => HFe = BFe /Fe = 0 => Ha ℓa = N i => Ha = N i / ℓa => Ba = o Ha = o N i / ℓa => Ba = (o / ℓa) N i .
Ogni linea di campo attraversa 2 volte il traferro , per cui ℓa = 2 . Nel caso di macchina simmetrica, a ciascun
attraversamento è associata metà della fmm totale concatenata, cioè N i/2 ; d’altra parte, si ricorda che la ddpm al traferro
quando Fe = ∞ è la fmm al traferro M, per cui si può scrivere N i/2 = M . Si ottiene quindi Ba = (o / ) M .
La fmm ed il traferro dipendono dall’angolo elettricoe , per cui anche l’induzione ne dipende: b(e ) = m(e ) / (e )
NOTA SU FORMA SINUSOIDALE DELLA FEM (e quindi dell’INDUZIONE B)
Nelle macchine elettriche, tramite opportuni accorgimenti, si fa in modo che il rapporto m(e ) / (e ) abbia sempre
andamento spaziale sinusoidale, così che anche b(e) abbia andamento spaziale sinusoidale, cioè b(e ) = BM cos(e) .
Esistono le seguenti situazioni.
- Se la fmm è costante, è il termine 1 /(e ) che deve avere andamento sinusoidale, cioè il traferro deve essere sagomato
in modo che 1 /(e ) = δmin cos(e ). Questa situazione si verifica quando l’avvolgimento è concentrato, per cui la
distribuzione spaziale di fmm è ad onda quadra. Si hanno strutture magnetiche cosiddette a poli salienti (fig. a), con corpi
polari attorno ai quali sono posti gli avvolgimenti concentrati. Ogni polo ha Ne spire percorse da una corrente costante Ie ,
per cui l’ampiezza dell’onda quadra di fmm è MM = Ne Ie ; l’induzione massima è BM = MM o /min .
- Se il traferro è costante, è la fmm m(e ) che deve avere andamento sinusoidale. Ci sono due sottocasi.
-- Se l’avvolgimento è trifase, e le tre correnti hanno somma nulla, si è visto che il diagramma di fmm è per natura
abbastanza sinusoidale, nel senso che si ha una gradinata che approssima bene una sinusoide.
-- Se l’avvolgimento è monofase, il diagramma di fmm è squadrato (si veda il diagramma di fmm di una fase di un
sistema trifase). E’ allora necessario adottare una distribuzione idealmente sinusoidale dei conduttori (fig. b), in modo che
la fmm generata abbia distribuzione spaziale sinusoidale. Si hanno strutture magnetiche cosiddette a poli lisci (fig. c), in
cui la distribuzione dei conduttori non è uniforme (i conduttori si addensano alle estremità del polo, e si diradano al centro
del polo). Anche qui, ogni polo ha Ne spire percorse da una corrente costante Ie , per cui il valore massimo della sinusoide
di fmm è ancora MM = Ne Ie ; qui il traferro è costante, e l’induzione massima è BM = MM o / .
Un ulteriore accorgimento utilizzato per rendere la forma d’onda di fmm (e quindi di induzione) più sinusoidale, consiste
nell’utilizzare bobine a passo accorciato, e sarà spiegato nel seguito.
NOTA: l’avvolgimento ha Ne spire per polo
=> nella fig. a ogni polo ha Ne spire, e nelle
fig. b e c c’è 1 solo avvolgimento con 2 Ne
spire.
FLUSSO DEL POLO . Si consideri un osservatore solidale col campo rotante: esso vede una distribuzione di induzione
sinusoidale nello spazio e invariabile nel tempo, del tipo b(e) = BM cos(e ). Si osservi ora che ogni semionda di
induzione rappresenta una porzione della periferia in cui le linee di flusso sono equiverse, e quindi rappresenta un polo
del campo. Si definisce “flusso di polo” l’integrale dell’induzione esteso ad un intero polo. Il polo è esteso da -/2 a
+/2 radianti elettrici. La superficie infinitesima è esprimibile dA = ℓ R d e, quindi si ha un integrale di linea in de. Il
flusso del polo risulta quindi Φ
BdA
A polo
π/ 2
π/ 2
BM cos(θe ) R dθe .
Essendo R = e BM = (o / δ) MM si ha Φ BM R 2 2 BM τ ; come è giusto che sia (in base al teorema del
π
valor medio dell’integrale), l’integrale è il prodotto del valor medio dell’induzione BM (2 / ) per l’area ℓ.
2 μo
Esprimendo poi l’induzione in funzione del valor massimo della fmm si ha Φ
MM τ .
π
In maniera analoga al vettore spaziale M , si può introdurre un vettore spaziale flusso di polo Φ , di modulo pari al flusso
del polo , e con direzione e verso coincidenti con quelli del vettore
M che genera il campo stesso.
VETTORI SPAZIALI ALLINEATI CON VETTORE DI PARK I . La trattazione precedente mostra che, con le
convenzioni assunte (campo e fasori elettrici ruotano nello stesso senso antiorario, il riferimento spaziale per la fmm è
l’asse magnetico della fase a, l’asse Reale del piano complesso è in fase con il riferimento spaziale, l’istante t = 0 è
quello in cui è massima la corrente nella fase a),
il vettore di Park I risulta allineato sia con il fasore elettrico corrente di
fase aIa sia con i vettori spaziali flusso di polo Φ e campo M .
16
INTRODUZIONE ALLA TEORIA VETTORIALE DELLE MACCHINE ELETTRICHE
Studio tramite vettori spaziali e fasori elettrici
JG
VETTORI SPAZIALI INDUZIONE B E FLUSSO DI POLO Φ . In modo analogo al vettore spaziale M , si possono
JG
introdurre i vettori spaziali induzione B e flusso del polo Φ , tutti allineati con M , e aventi come modulo il valore
massimo dell’induzione BM (BM = (μo / δ) MM ) e il valore del flusso del polo Φ = (2 / π ) BM τ ℓ =Λδ MM .
Ovviamente, fra i vettori spaziali valgono le stesse relazioni valide fra le corrispondenti grandezze scalari:
G
G
G
G
G
μ
BM = o M M
Φ = 2 τ A BM = Λδ M M
δ
π
VETTORI SPAZIALI nel caso di AVVOLGIMENTO MONOFASE ROTANTE. Si è visto che anche nel caso di
campo rotante generato dalla rotazione di un avvolgimento monofase, la distribuzione spaziale dell’induzione è
sinusoidale => anche in questo caso si possono usare dei vettori spaziali. In particolare, si definiscono 2 vettori spaziali,
allineati con l’asse del polo, le cui ampiezze coincidono con le ampiezze delle corrispondenti grandezze scalari:
G
vettore spaziale corrente di eccitazione I e , di modulo pari alla corrente di eccitazione Ie;
vettore spaziale fmm di eccitazione M , di modulo pari alla fmm di eccitazione MM.e = Ne Ie .
ALLINEAMENTO fra VETTORE SPAZIALE CAMPO M e FASORE ELETTRICO
CORRENTE⎯I (CHE GENERA IL CAMPO) nel caso di CAMPO ROTANTE TRIFASE.
Si consideri una macchina a 2 poli, così che θe = θm = θ , e si consideri il campo rotante generato da
un sistema trifase.
γ = ωt
asse fase a
Si è visto che il campo rotante è rappresentabile con un vettore spaziale M che ruota nel traferro a
velocità Ωo = ω, per cui, nel piano assiale della macchina, e avendo assunto come riferimento l’asse
magnetico della fase a, la fase spaziale di M è γ = ω t .
Si consideri ora il fasore rappresentativo della corrente (che genera il campo) della fase a : essendo
ia(t) = √2 I cos(ω t) , il corrispondente fasore è⎯I = I ⋅ exp(jω t); esso è un fasore che ruota nel piano
complesso a velocità ω, quindi, nel piano complesso, ha fase γ = ω t .
ω
JJG
a M
8
ω
ℑm ⎯ I
γ = ωt
ℜe
Si riconosce quindi che la fase spaziale di M nel piano assiale della macchina coincide con la fase
del fasore⎯I nel piano complesso.
Ora, si effettui una sovrapposizione fra i due piani, il piano assiale della macchina (in cui giace e ruota il vettore
spaziale M ) ed il piano complesso (in cui giacciono e ruotano i fasori elettrici); la sovrapposizione sia effettuata in
maniera tale che l’asse reale ℜe del piano complesso coincida con l’asse magnetico della fase a di statore. In queste
condizioni, il vettore M ed il fasore⎯I sono in fase. Si può allora definire un’unica grandezza, cioè un vettore spaziale
G
corrente I , che riassume le proprietà sia del fasore elettrico⎯I , sia del vettore spaziale M : ruota nel piano complesso a
G
velocità ω, ha espressione I = I ⋅ exp(jω t), e la sua direzione indica istante per istante la posizione del vettore spaziale
campo magnetico. Tale vettore spaziale è chiamato “Vettore Spaziale di Park”.
JG
ALLINEAMENTO FRA VETTORE SPAZIALE FLUSSO INDUCENTE Φ
e FASORE ELETTRICO FLUSSO CONCATENATO⎯Ψ.
Studiando la fem indotta in una spira da un campo rotante, si era considerata
una macchina a 2 poli isotropa, una spira diametrale, un campo rotante a
distribuzione spaziale sinusoidale in moto relativo rispetto alla spira. Si era
assunto θ l’angolo fra l’asse del campo e l’asse della spira, α la coordinata
angolare misurata dall’asse del campo, β = α + θ la coordinata angolare
misurata dall’asse della spira, θ la velocità relativa fra spira e campo, R il
raggio del rotore, ℓ la lunghezza assiale della macchina, τ = πR il passo
polare, BM il valore massimo dell’induzione nel traferro, Φ il flusso del polo.
Come visto precedentemente, al campo rotante si possono associare i vettori spaziali campo M ,
JG
induzione B e flusso del polo Φ , tutti allineati fra loro e rotanti nel traferro a velocità Ωo = θ ;
segue che, nel piano assiale della macchina, e avendo assunto come riferimento l’asse magnetico
JG JG
della fase a, la fase spaziale di M , B e Φ è ξ = θ t .
Si è poi visto che l’espressione del flusso concatenato con la spira è ψs = Φ cos(θ ) = Φ cos( θ t) , e
a tale flusso concatenato era stato associato un fasore flusso concatenato con la spira⎯Ψs , che si
comporta come tutti i fasori elettrici: ruota nel piano complesso a velocità θ , quindi, nel piano
complesso, ha fase ξ = θ t .
JG
Si osserva quindi che la fase spaziale dei vettori spaziali B e Φ coincide con la fase del fasore
flusso concatenato con la spira⎯Ψs.
asse
campo
α
β
θ
asse
spira
JJG
θ
ξ = θ t
Φ
asse spira
8
ℑm ⎯Ψ θ
ξ = θ t
ℜe
17
Nulla cambia se al posto di una singola spira si considera un intero avvolgimento, e come riferimento per gli angoli si
JG
assume l’asse magnetico dell’intero avvolgimento: ancora si concluderà che la fase spaziale dei vettori spaziali B e Φ
coincide con la fase del fasore flusso concatenato con l’avvolgimento⎯Ψ.
Ora, come prima si effettui una sovrapposizione fra il piano assiale della macchina (in cui giace e ruota il vettore
spaziale Φ ) ed un piano complesso (in cui giacciono e ruotano i fasori elettrici), in modo che l’asse reale ℜe del piano
complesso coincida con l’asse magnetico dell’avvolgimento; si osserva che Φ e⎯Ψ sono in fase, cioè il fasore elettrico
⎯Ψ (flusso concatenato con l’avvolgimento) è in fase con il vettore spaziale flusso inducente Φ .
ALLINEAMENTO fra⎯Ψ ed ⎯I nel caso di FLUSSO AUTOCONCATENATO.
Si consideri un avvolgimento trifase, percorso da un sistema trifase di correnti di valore efficace I. Tale sistema genera
un campo rotante, e si è visto che il vettore spaziale campo rotante M è in fase con il fasore elettrico corrente di fase a
⎯I . Il campo rotante genera un flusso di polo Φ , che si concatena con l’avvolgimento stesso, originando un flusso
autoconcatenato Ψ. Si è poi visto che il fasore elettrico flusso concatenato⎯Ψ è in fase con il vettore spaziale flusso
inducente Φ . Ora, dato che Φ è in fase con M , ed M è in fase con il fasore⎯I, si ha che i fasori⎯Ψ ed ⎯I sono in fase.
Tale risultato non è scontato, perché si osservi che⎯I è il fasore della corrente di fase a, ma⎯Ψ non è il flusso
concatenato generato dalla sola corrente⎯I, bensì generato dal campo rotante, e quindi dall’insieme delle 3 correnti.
INDUTTANZA DEL CAMPO PRINCIPALE.
Avendo mostrato che⎯Ψ ed ⎯I sono in fase, è lecito assumere che siano legati da una induttanza, che prende il nome di
“induttanza del campo principale”. L’espressione di tale induttanza si può ricavare in 2 modi:
1. Rapporto fra flusso concatenato e corrente
μ 3 2 f aU
μ
3 ( f U )2
τA
1 f aU 1 2
Ψ 1 f aU Φ
1 f aU 1 2
1 f aU 1 2
=
I= 2 a
μo
τA o
L= =
τ A BM =
τ A o MM =
δ π
p
p
δ
I 2
δ
I
I 2
I 2
π
2 π
2 I 2
2 π
2 π
2. Rapporto fra reattanza e pulsazione, la reattanza ottenuta da rapporto fra fem e corrente
2
X
1 E AVV
11
11
ωΦ 1
Φ
3 (f U)
τA
.
=
=
= f aU
= ... = 2 a
L=
f aUEc =
f aU
μo
ω ω I
ωI
ωI
p
δ
π
2 2 I
2 2
LEGAME fra FASORE fem⎯E e FASORE FLUSSO CONCATENATO ⎯Ψ. Valgono le due solite convenzioni:
⎯E = jω ⎯Ψ
⎯E
(usata x motori)
q
d
⎯Ψ
d
⎯E = - jω ⎯Ψ
⎯Ψ
(usata x generatori)
⎯E
q
PERMEANZA DI TRAFERRO Λδ . Il rapporto tra il flusso di polo Φ e la fmm che lo genera MM è interpretabile
Φ
2
τA
come una permeanza, detta permeanza “del flusso principale” o “di traferro”; essa vale Λδ =
.
= μo
MM π
δ
PERMEANZA DI DISPERSIONE. Oltre alla permeanza di traferro, esiste una permeanza di dispersione Λd, che
origina il flusso disperso (cioè quello che non attraversa il traferro). A differenza del flusso principale, non si può dare
un’espressione del flusso disperso, per cui Λd non è calcolata dal rapporto flusso/fmm, ma è calcolata per via
geometrica dal circuito magnetico di dispersione.
a)
b)
Illustrazione schematica del flusso disperso in cava (a), attorno alle teste di matassa (b).
18
fem INDOTTA IN UNA SPIRA DA UN CAMPO ROTANTE
In una macchina a 2 poli isotropa, si considerino un campo rotante a
asse
campo
distribuzione spaziale sinusoidale ed una spira diametrale; il campo rotante
può essere creato o da un avvolgimento fisso percorso da corrente variabile,
o da un avvolgimento rotante percorso da corrente costante; la spira può
essere sul rotore o sullo statore, ma sia in moto relativo rispetto al campo.
Siano l’angolo fra l’asse del campo e l’asse della spira, la coordinata
asse
angolare misurata dall’asse del campo, = + la coordinata angolare
spira
misurata dall’asse della spira, θ la velocità relativa fra spira e campo. Siano
poi R il raggio del rotore, ℓ la lunghezza assiale della macchina, = R il
passo polare, BM il valore massimo dell’induzione nel traferro.
INDUZIONE. Per ipotesi, l’induzione ha distribuzione spaziale sinusoidale, perciò nel riferimento del campo rotante ha
= - ,
si ha
b( ) = BM cos( - )
espressione b() = BM cos() ; essendo
FLUSSO CONCATENATO. Si considerino ora il flusso concatenato con la spira, e la fem in essa indotta; per far ciò,
occorre porsi solidali con la spira stessa. Il flusso concatenato s con la spira è il flusso abbracciato dalla spira stessa,
quindi è l’integrale dell’induzione valutato fra - /2 e /2, usando come variabile la coordinata :
ψs
π 2
π 2
b β Rdβ
π 2
π 2
BM cos(β θ) Rdβ BM Rsin(β θ)
π 2
π 2
BM R 2 cos(θ) .
2
BM τ BM R 2 ,
si ha
s = cos().
π
FEM INDOTTA, NEL CASO DI FLUSSO COSTANTE NEL TEMPO. La fem es indotta nella spira è la derivata del
flusso concatenato: es = ds / dt . Se il flusso è costante nel tempo, si ha es = - θ sin( ).
Questa espressione è fondamentale, perché mostra che sia l’ampiezza sia la pulsazione della fem sono proporzionali alla
velocità relativa θ fra la spira ed il campo rotante; lo stesso vale quindi per l’ampiezza e la pulsazione della corrente
che circola nella spira, se questa è chiusa in corto circuito, od è chiusa su un’impedenza di carico.
Se = cost ( θ = 0), non c’è fem indotta (es.: spira solidale col campo rotante).
Se θ = cost (e quindi = θ t ) si ha es = - θ sin( θ t).
Φ
Ricordando che il flusso del polo risulta
NOTA BENE: es(t) è sinusoidale nel tempo, perché b( ) è sinusoidale nello spazio. Ecco perché è fondamentale avere
una distribuzione di induzione sinusoidale.
NOTA1: è l’angolo della distribuzione di induzione => è angolo elettrico e , non meccanico m => in una macchina a
= θ p/2 . Di solito, la “velocità” elettrica si indica con ( e
p poli, come sempre occorre porre e = m p/2 e
e
m
e
quella meccanica
θ m con ), per cui si scrive es = - sin( t).
può essere scritto come 2 f => si ricava la frequenza fe della fem indotta: fe = θ /2 .
NOTA2:
e
e
Se la velocità del campo è N =
θ m 60/2 , si ha fe = θ e /2 = θ m (p/2) /2 = N (2 / 60) (p/2) /2 = p N/120.
NOTA3: se il campo rotante è generato da un sistema trifase di correnti di frequenza fi ,si è visto che la velocità del
campo è No = 120 fi /p . Se la spira è ferma, la velocità del campo rispetto alla spira è proprio No, per cui si ha
fe = p No /120 = p (120 fi /p)/120 = fi : la frequenza della fem indotta nella spira coincide con la frequenza della corrente
che genera il campo rotante.
SENSO CICLICO (SEQUENZA) DELLA fem INDOTTA IN UN AVVOLGIMENTO TRIFASE
Il senso ciclico della fem trifase (cioè il fatto che sia sequenza diretta o
A
inversa) dipende solo da come i morsetti dell’avvolgimento sono
M A
connessi alla linea (cioè dalla sequenza dei morsetti). Infatti: fissata la
c
struttura dell’avvolgimento ed il verso di rotazione del campo, è fissata
o
a
la sequenza della fem indotta ai morsetti di macchina: la fase che viene
attraversata per prima dall’asse del campo è la fase a, la seconda è la b, B
C
B
b
la terza è la c.
A questo punto, la sequenza delle fem in rete dipende solo da come sono connessi i morsetti alla rete.
SEQUENZA INVERSA
SEQUENZA DIRETTA
3
2
1
1
3
M A
M A
M A
M A
M A
M A
o
B
o
C
BCA
2
1
B
o
C
CAB
1
3
B
ABC
o
C
3
2
B
o
C
ACB
2
3
B
C
2
o
C
CBA
1
2
B
C
BAC
19
3
1
FASORI. Sempre nell’ipotesi θ = cost , le grandezze sono sinusoidali nel tempo, con pulsazione θ costante; si può
allora passare al regime fasoriale, associando i corrispondenti fasori.
s(t) = cos( θ t) => al flusso concatenato si associa un fasore flusso concatenato s 2 exp( j t ) .
es = - θ sin( θ t) = θ cos( θ t + /2) => alla fem si associa un fasore fem che ha espressione
θΦ
π
θΦ
Es
exp j θ t j
exp( j θ t ) j θ s , in accordo col fatto che E j ω .
2
2
2
Si noti che è stato definito come l’angolo spaziale fra asse della spira e asse del campo, ossia fra asse della spira e
vettore spaziale flusso di polo Φ , perciò, se si assume come riferimento spaziale l’asse magnetico della spira, il vettore
spaziale Φ ha fase spaziale ; quindi, la fase spaziale del flusso di polo Φ coincide con la fase temporale θ t del
fasore elettrico flusso concatenatos ; ne segue che il fasore elettrico flusso concatenatos è allineato col vettore
s , il fasore fem Es risulta in quadratura in anticipo rispetto
spaziale flusso di polo Φ . In base alla relazione E j
s
al fasore flusso concatenatos , e quindi rispetto al vettore spaziale flusso di polo
Φ.
SFASAMENTO FRA fem DI SPIRA e FRA FLUSSI CONCATENATI DI SPIRA
Se si considera una seconda spira in anticipo di un angolo rispetto alla
prima, gli angoli e diventano ’ = + e ’ = + . Si possono
allora ripetere i medesimi passaggi di prima, utilizzando gli angoli ’ e ’.
Si ha quindi che:
il flusso concatenato è s2( ) = cos( + ), s2 (t) = cos( θ t + ),
la fem indotta è es2 (t) = - θ sin( θ t + ),
il fasore flusso è s 2 Φ
2 exp j γ s1 exp j γ
asse spira 1
Φ
exp j γ j θ s1 exp j γ Es1 exp j γ .
il fasore fem è Es 2 j θ
2
asse
campo
’
’
asse spira 2
L’espressione a cui si è giunti è fondamentale, perché mostra che lo sfasamento fra i fasori (che si traduce in uno
sfasamento temporale fra le corrispondenti forme d’onda) coincide con lo sfasamento spaziale fra gli assi magnetici
delle spire (che a sua volta corrisponde allo sfasamento spaziale fra due cave adiacenti). In una macchina a p poli la
relazione non sarà più di coincidenza, ma di proporzionalità secondo il fattore p / 2 : lo sfasamento fra i fasori è un
angolo elettrico e , lo sfasamento fra le cave è un angolo meccanico m , e i due sono legati dalla solita relazione.
fem e flusso RISULTANTE DI AVVOLGIMENTO E FATTORE DI AVVOLGIMENTO
Se le due spire sono in serie, la fem risultante ai morsetti è la somma delle fem delle spire, e quindi il fasore associato è
la somma dei fasori delle fem delle singole spire:Es12 = Es1 +Es2 .
Trattandosi di una somma vettoriale, la risultante è inferiore alla somma dei moduli: |Es12 | < |Es1|+ |Es2| ; inoltre,
se la macchina è simmetrica, le spire sono tutte uguali, per cui il modulo della fem di spira è uguale per tutte le spire:
|Es1|= |Es2| = |Es| ; si può quindi scrivere |Es12 | < |Es1|+ |Es2| = 2 |Es | .
Il ragionamento si ripete nel caso siano presenti Nb spire in serie, la cui risultante è il fasore fem dell’avvolgimento
EAVV : |EAVV | < |Es1 |+ |Es2 | + |Es3 | +… = Ns |Es | . Il rapporto fra |EAVV | ed Ns |Es | è detto fattore di
avvolgimento fa , ed è utilizzato per esprimere in modo sintetico il modulo della fem dell’avvolgimento |EAVV |, nota la
fem di una singola spira |Es | , perché in base alla definizione si può scrivere |EAVV | = fa Ns |Es | = fa Ns θ 2 .
Più solitamente, anziché la fem di spira si considera quella di conduttore |Ec | (che è la metà della fem di spira: |Ec | =
|Es | / 2 ), e il numero di spire è sostituito dal numero di conduttori U (che è il doppio del numero spire: U = 2 Ns) ; si
ha quindi un’espressione identica |EAVV | = fa U |Ec | = fa U θ /(2√2)
Lo stesso ragionamento si applica ai fasori flusso concatenato di spira, per cui si può definire un fasore flusso
concatenato di avvolgimentoAVV di modulo AVV = fa Ns /√2 = fa U /(2√2) .
FASORI. Con considerazioni geometriche, si può dimostrare che vale per l’avvolgimento globale quanto vale per una
singola spira, cioè il fasore flusso concatenato di avvolgimentoAVV è in fase con il vettore spaziale flusso di polo Φ ;
il fasore risultante fem di avvolgimento EAVV risulta in quadratura in anticipo rispetto al fasore flusso
concatenatoAVV, e quindi rispetto al vettore spaziale flusso di polo Φ .
20
FATTORE DI AVVOLGIMENTO PER LE FMM. Si è visto che fa serve per comporre i fasori elettrici fem di spira.
D’altra parte, si è visto che lo sfasamento temporale tra tali fem coincide (a meno del fattore p/2) con lo sfasamento
spaziale fra le spire. Ne segue che la composizione dei vettori spaziali fmm di spira per ottenere la fmm di
avvolgimento si può effettuare con lo stesso fa introdotto per le fem.
ESPRESSIONE DELLA FMM DI AVVOLGIMENTO. In base alla precedente osservazione, il modulo |MAVV | della
fmm di avvolgimento si può esprimere con una espressione analoga alla |EAVV | = fa U |Ec | ; occorre però
considerare che la semionda di fmm è estesa ad 1 polo, perciò i conduttori che contribuiscono a generarla sono solo
quelli di 1 polo, ossia U/p; l’espressione si modifica quindi in |MAVV | = fa U/p |Mc |, dove Mc è la fmm di 1
conduttore. La fmm di 1 conduttore è pari alla corrente del conduttore stesso, cioè 2 I (con le grandezze magnetiche si
considera il valore massimo, non l’efficace, perché la saturazione dipende dal valore massimo). La fmm ha andamento
ad onda quadra, ma per poter effettuare la composizione vettoriale, occorre avere degli andamenti sinusoidali => si
considera la 1° armonica. Data un’onda quadra di ampiezza A, la sua prima armonica ha ampiezza (4/) (A/2) => la 1°
armonica della fmm di 1 conduttore ha ampiezza Mc = (4/) (2 I /2) = (22/ )I .
Quindi, la fmm di un avvolgimento monofase è |MAVV.mono | = fa U/p (22/ )I. Se l’avvolgimento è trifase, dato che
l’ampiezza del campo trifase è (3/2) dell’ampiezza del campo monofase, si ha |MAVV.tri | = fa U/p (32/ )I,
con U = N° conduttori in serie per fase, p = N° poli, I = valore efficace della corrente sinusoidale.
Se l’avvolgimento monofase è concentrato, si ha fa = 1; inoltre, il N° di conduttori per polo U / p è pari al doppio del
numero di spire per polo Ne : U / p = 2 Ne . L’ampiezza della fmm di un avvolgimento monofase concentrato risulta
quindi M AVV .mono.conc = 2 2 2 N e I = 4 2 N e I . A questo risultato si perviene anche considerando che la fmm di un
avvolgimento concentrato di Ne spire per polo è un’onda quadra di ampiezza Ne 2 I , per cui la 1° armonica ha
ampiezza (4 /) Ne2 I .
21
22
23
24
25
26
27
28
CONVERSIONE ELETTROMECCANICA DELL’ENERGIA
Fem TRASFORMATORICA E MOZIONALE
La legge dell’induzione elettromagnetica afferma che e = dψ / dt. Si è visto che ψ = L i, per cui e = L di/dt. Ma questo
suppone che L sia costante nel tempo. In generale, L può variare, per cui in generale si ha e = L di/dt + i dL/dt. Il primo
termine è quello che abbiamo sempre considerato finora, ed è detta fem trasformatorica et; si chiama così perché è
quella su cui si basa il funzionamento del trasformatore, ed è dovuta ad una variazione nel tempo della corrente (cioè
del campo magnetico). Il secondo termine è per noi nuovo, ed è detto fem mozionale em, perché è dovuta ad una
variazione geometrica del circuito, o ad un movimento del circuito (meglio, un moto relativo fra circuito e campo).
Vediamo esempio. Consideriamo una spira1 fissa nel piano xz e una spira2 rotante a velocità Ω intorno ad un asse
parallelo all’asse x; fra i piani delle due spire c’è un angolo θ = Ω t. La spira1 è percorsa da una corrente i1(t) che
genera un campo H1(t) e B1(t); si ha quindi un flusso magnetico generato dalla spira1, che si concatena anche con la
spira2. Dato che la spira2 ruota, il flusso che la attraversa cambia nel tempo, quindi il flusso concatenato con la spira2
cambia. Se la spira 2 ha sezione A2, il flusso con essa concatenato è ψ2(t) = B1(t) A2 cos(θ) = B1(t) A2 cos(Ω t). La
fem indotta è la derivata del flusso, da cui e2 = d ψ2(t) / dt = d B1(t) / dt A2 cos(θ) - B1(t) A2 Ω sin(Ω t) (come legame
flusso-fem ho utilizzato la regola della mano sinistra). Il primo termine è la fem trasformatorica et (esiste solo se B1(t)
cambia nel tempo); il secondo termine è la fem mozionale em (esiste solo se la spira si muove).
z
i1(t)
y
e
x
1
2
Ω
z
piano spira
fissa
Ω
B1(t)
θ
⊕
V
piano spira
rotante
vs(t)
θ=Ωt
y
LEGGE ELEMENTARE DELL’INDUZIONE ELETTROMAGNETICA
Nelle macchine elettriche la fem indotta è prevalentemente di tipo mozionale, perché in prima approssimazione il
campo è costante nel tempo, ma ruota nello spazio (vedi Campo Rotante), per cui la fem è dovuta al moto relativo
campo-spire. Se la fem trasformatorica è assente (cioè se il campo è costante), la Legge dell’Induzione assume una
forma particolare, che è detta “Legge Elementare dell’Induzione Elettromagnetica”. Vediamo come si ottiene.
Si consideri un sistema formato da due binari metallici fissi, sui quali scorre un conduttore di lunghezza l; un motore
imprime al conduttore una velocità⎯v; tutto è immerso in un campo magnetico costante⎯B, ortogonale al piano del
circuito; il circuito è chiuso su un lato da un voltmetro. Dato che il conduttore si sposta, l’area del circuito cambia,
perciò cambia il flusso concatenato col circuito; nel circuito è quindi indotta una fem che, utilizzando la regola della
mano sinistra, risulta e = dψ(t) / dt. Si valuta tale derivata come il limite, per Δt → 0, di Δψ / Δt. La variazione di flusso
concatenato si ottiene moltiplicando l’induzione B per la variazione dell’area del circuito, cioè per l’area CC’D’D, che a
sua volta è esprimibile come l v Δt. La fem è quindi esprimibile come B l v.
e=
dψ
Δψ
B ⋅ Area (CC ' D ' D)
B ⋅ l ⋅ v ⋅ Δt
= lim
= lim
= lim
= B⋅l ⋅v
Δt → 0
dt Δt →0 Δt Δt →0
Δt
Δt
C
C’
Se ⎯B non fosse ortogonale al piano del circuito, occorre
B
considerare la normale⎯n al piano del circuito e scrivere
Δψ =⎯B ⋅⎯n l v Δt ; orientando⎯n come il campo, e il
+
+
+
⊕
+
+ ⎯v +
conduttore⎯l come la fem letta dal voltmetro (regola mano
⎯B
l
⎯e
V
sinistra), il versore⎯n risulta parallelo al prodotto vettoriale
⎯dl
+
+
+
+
+
+
⎯l ×⎯v, per cui ⎯n l v = ⎯l ×⎯v, da cui Δψ = ⎯B ⋅⎯l ×⎯v Δt;
A
per le regole del prodotto vettoriale, si ha ⎯B ⋅⎯l ×⎯v =⎯v
D
D’
×⎯B ⋅⎯l, da cui Δψ =⎯v ×⎯B ⋅⎯l Δt e e = ⎯v ×⎯B ⋅⎯l ;
v dt
come vettore, ⎯e = ⎯v ×⎯B ⋅ l .
Questa è la formulazione della Legge Elementare dell’Induzione Elettromagnetica.
Si osservi che la velocità⎯v è la velocità del conduttore rispetto al campo, NON del campo rispetto al conduttore.
29
CONVERTITORE ELETTROMECCANICO ELEMENTARE REVERSIBILE
Si vuole mostrare che il sistema considerato per ricavare la Legge Elementare dell’Induzione Elettromagnetica
rappresenta un convertitore elettromeccanico elementare reversibile, cioè un sistema in grado di convertire potenza
meccanica Pmecc in elettrica Pel e viceversa.
Si consideri quindi un sistema formato da due binari metallici fissi, di resistenza trascurabile, sui quali scorre un
conduttore di lunghezza l, massa M, resistenza R; il circuito elettrico costituito da binari e conduttore è dunque aperto; il
tutto è immerso in un campo magnetico costante⎯B, ortogonale al piano del circuito (fig. 1).
Generatore (fig. 2).
Il sistema meccanico esercita sul conduttore una forza meccanica ⎯Fmec, che lo fa muovere a velocità⎯v => si ha un
conduttore in moto a velocità⎯v, immerso in un campo⎯B => il campo induce nel conduttore una fem⎯e =⎯v ×⎯B ⋅ l
(nel disegno la fem è misurata con la regola mano sinistra). Si chiuda il circuito con un conduttore di resistenza
trascurabile => circola una corrente i = e/R. Allora si ha un conduttore percorso da corrente i immerso in un campo⎯B
=> il campo esercita sul conduttore una forza magnetica⎯Fmagn =⎯i ×⎯B ⋅ l . Il sistema trova un equilibrio (cioè la
velocità è costante) quando le due forze sono uguali ed opposte:⎯Fmagn = -⎯Fmecc. Se le forze sono uguali, si ha F v =
i B l v = i e, cioè la potenza meccanica F v uguaglia la potenza elettrica e i (in realtà, questo si poteva già affermare in
base al Principio di Conservazione dell’Energia). La Pmecc entrante si converte in Pel uscente => il conduttore è una
macchina elettrica che si sta comportando da generatore (e infatti, nel conduttore la fem e la corrente sono concordi).
i
⎯Fmec
+
+
+
+
+ massa M,
lunghezza l,
resistenza R
+
⎯B
+
+
+
+
+
+
⎯B
+
+
+
⎯e
+
+
+ ⎯v
+
+
+
⎯Fmagn
+
Fig. 1: Convertitore Elettromeccanico Elementare
Fig. 2: funzionamento da Generatore
Motore a corrente impressa (fig. 3).
Si chiuda ora il circuito con un generatore di corrente is, che impone una corrente di verso opposto a prima. Il
conduttore è percorso da corrente is ed immerso in un campo⎯B => il campo esercita sul conduttore una forza magnetica
⎯Fmagn =⎯i ×⎯B ⋅ l => il conduttore inizia a muoversi a velocità⎯v. Per come sono messe le grandezze, la velocità è
nella stessa direzione di prima. A questo punto, si ha un conduttore in moto a velocità⎯v, immerso in un campo⎯B => il
campo induce nel conduttore una fem⎯e =⎯v ×⎯B ⋅ l (nel disegno la fem è misurata con la regola mano sinistra).
Ovviamente, il sistema può raggiungere un equilibrio solo se la forza magnetica è bilanciata da una forza meccanica
Fmec. A regime (cioè v = cost), ⎯Fmagn = -⎯Fmecc. Se le forze sono uguali, si ha i e = i B l v = F v, cioè la potenza
elettrica e i uguaglia la potenza meccanica F v (anche qui, questo si poteva già affermare in base al Principio di
Conservazione dell’Energia). La Pel entrante si converte in Pmecc uscente => il conduttore è una macchina elettrica che
si sta comportando da motore (e infatti, nel conduttore la fem e la corrente sono opposte).
Motore a tensione impressa (fig. 4).
Si sostituisca il generatore di corrente con un generatore di tensione vs . All’istante iniziale, la corrente vale i0 = vs /R ,
per cui il campo esercita sul conduttore una forza f0 = B l i0 , per cui il conduttore accelera progressivamente. Essendo in
moto a velocità υ, nel conduttore è indotta una fem e = B l υ, e il valore della corrente diventa i = (vs – e)/R .
In questa condizione, le forze che si esercitano sul conduttore sono:
2) forza di inerzia: M d υ / dt ;
l) forza motrice: fm = B l i = B l (vs – e) / R = B l (vs – B l υ) / R;
3) forza frenante (dovuta alla resistenza di attrito o ad altri elementi che contrastano il movimento): fr ;
Naturalmente la somma di tutte le forze agenti sul conduttore deve essere nulla: fm + fr + M d υ / dt = 0 ,
Assegnando alle forze segno positivo quando dirette nella medesima direzione della velocità, si ha : fm = fr + M d υ /dt
In assenza di forza resistente, tutta la forza motrice si esaurisce nella forza di inerzia conseguente all'accelerazione cui è
soggetto il conduttore. Il sistema va in equilibrio quando la forza motrice si annulla, cosa che si verifica quando si
annulla la corrente, cioè per vs = eo e quindi ad una velocità υo = vs / B l
In presenza di una forza frenante fr il sistema è in equilibrio dinamico per fm = fr cioè quando
fr = B l i = B l (vs – e) / R = B l (B l υo – B l υ) / R = B2 l2 / R (υo – υ)
da cui si ricava la velocità a regime υ = υo – fr / (B2 l2 / R) che è sempre inferiore a quella di marcia a vuoto υo (senza
forza frenante), mentre la caduta di velocità υo - υ è direttamente proporzionale alla forza frenante.
⎯Fmagn
is
+
+
+
+
+
⎯B
⎯e
+
+
+
i + ⎯v +
⎯Fmec
fm
+
+
+
+
+
⎯B
vs
+
+
+
+
+
+
⎯e
+
+
i + ⎯υ
fr
Fig. 3: funzionamento da Motore a corrente impressa
Fig. 4: funzionamento da Motore a tensione impressa
Ritroveremo questo funzionamento sia nella Macchina a Induzione, sia nella Macchina a Corrente Continua.
30
Caso di macchina rotante
Tutte le relazioni scritte nel precedente paragrafo per il dispositivo a moto rettilineo, rimangono valide per una
macchina rotante se si fanno le seguenti sostituzioni:
- il prodotto B l diventa il flusso Φ ;
- la forza motrice fm diventa coppia motrice Cm ;
- la velocità lineare v diventa velocità angolare Ω ;
- la forza d'inerzia M dv/dt diventa la coppia d'inerzia J dΩ/dt ;
- la forza frenante fr diventa la coppia frenante Cr .
Si ottiene allora:
e=ΩΦ
Cm = Φ I
e I = Ω Cm .
All'equilibrio delle forze va sostituito l'equilibrio delle coppie che, se prese positive quando concordi con la velocità,
diventa: Cm = Cr + J dΩ/dt
In assenza di coppia frenante (a vuoto) si avrà sempre vs = e e quindi Ωo = vs / Φ
In presenza di coppia frenante, a regime, dΩ/dt = 0 , Cm = Cr da cui
Cr = Φ (vo – e) / R = Φ (Ωo Φ – Ω Φ ) / R = Φ 2 / R (Ωo – Ω )
da cui si ottiene la velocità a carico Ω = Ωo – Cr / (Φ 2 / R )
Caratteristiche del convertitore elementare
Le caratteristiche che identificano un convertitore elettromeccanico elementare sono proprie di ogni convertitore
elettromeccanico. In particolare, sono identificabili sempre due porte, una elettrica (con corrente i e fem e = B l v = k v)
ed una meccanica (con velocità v e forza F = B l i = k i); la potenza elettrica e i è convertita in potenza meccanica F v, o
viceversa. Se il sistema, anziché lineare, è rotante, la forza F è sostituita dalla coppia C, e la velocità lineare v dalla
velocità angolare Ω.
Si osserva inoltre che per la Conversione Elettromeccanica sono sempre necessari 2 agenti: 1 campo ed 1 corrente; la
corrente genera un secondo campo; i due campi si compongono, dando uncampo risultante; tale campo è il mezzo che
consente la conversione Energia Elettrica ÅÆ Energia Meccanica.
CARATTERISTICHE MECCANICHE STATICHE - STABILITÀ DEL PUNTO DI LAVORO
Nelle macchine elettriche che funzionano da motori la relazione
Cm - Ω ha forma relativamente complessa, e viene normalmente
identificata mediante una curva nel piano C - Ω detta appunto
caratteristica meccanica.
Della caratteristica meccanica sono di particolare interesse le
intersezioni con gli assi:
per velocità nulla (Ω = 0) si ha la coppia di avviamento
per coppia nulla (Cm = 0) si ha la velocità di marcia a vuoto
Esempi di caratteristiche meccaniche sono indicati in fig. 5.
Ugualmente, anche i carichi meccanici che i motori elettrici
sono destinati a trascinare - che per il motore si presentano
come freni - presentano una determinata relazione tra coppia
Fig. 5:Caratteristiche meccaniche di alcuni motori elettrici:
frenante Cf e velocità di rotazione, a sua volta esprimibile
(1) motore asincrono; (2) motore a corrente continua con
mediante una caratteristica meccanica del freno .
eccitazione indipendente; (3) motore a corrente continua con
eccitazione serie; (4) macchina sincrona.
Nella pratica le caratteristiche meccaniche dei carichi applicati a motori elettrici possono essere di tre tipi:
l) Coppia frenante indipendente dalla velocità (fig. 6a): caso tipico l'azionamento per un sollevamento (gru,
montacarichi, ecc), in cui la forza resistente è data dalla massa da sollevare per l'accelerazione di gravità; oppure,
l’attrito fra cuscinetti e albero rotante, o l’attrito fra veicolo e suolo.
2) Coppia frenante direttamente proporzionale alla velocità: caso relativamente raro, che si verifica quando il carico
meccanico è costituito da un generatore elettrico (a flusso costante) caricato su una resistenza (o impedenza se in c.a.)
costante, ad esempio una dinamo freno (fig.6b).
3) Coppia frenante proporzionale al quadrato della velocità: caso assai frequente, tipico di tutte le macchine fluidodinamiche (ventilatori. pompe ecc.) e della resistenza aerodinamica (che interessa la trazione ferroviaria) (fig. 6c).
Naturalmente i vari fenomeni spesso si verificano simultaneamente (ad esempio 1 e 3 = attrito + penetrazione: per il
movimento di un veicolo) dando origine a caratteristiche meccaniche del tipo indicato in fig. 6d.
31
C
C
Cf = cost
Ω, N
C
Cf ∝ Ω
C
Cf ∝ Ω
Ω, N
2
Ω, N
penetrazione
attrito
Ω, N
Fig. 6: Caratteristiche meccaniche di varie tipologie di carichi: a) coppia indipendente dalla velocità, b) coppia
proporzionale alla velocità, c) coppia proporzionale al quadrato della velocità, d) caratteristica meccanica di un
veicolo (vista all’asse motore).
Riportando sul medesimo piano le caratteristiche meccaniche del motore e dei carico meccanico (del freno) si possono
visualizzare i tre elementi caratteristici dell'equazione di equilibrio meccanico: Cm = Cf + J dΩ/dt
Nelle zone in cui si Cm > Cf si avrà un’accelerazione angolare dΩ/dt = (Cm - Cf ) / J positiva; invece, dove Cm < Cf si
avrà un’accelerazione angolare negativa, ossia la macchina rallenterà; infine in tutti i punti in cui Cm = Cf saremo in un
punto di equilibrio, cioè la velocità è costante. Tale situazione può essere però stabile o instabile.
Preso in considerazione un punto di equilibrio, esso è stabile se ad una variazione di coppia d’inerzia Ci (a cui, per
natura, corrisponderebbe una variazione nello stesso senso della velocità Ω ), corrisponde una variazione in senso
opposto della velocità. Più in dettaglio: Ci può aumentare (se aumenta Cm o diminuisce Cf ), oppure diminuire (se
aumenta Cf o diminuisce Cm ); per natura, a ciò corrisponderebbe, rispettivamente, un aumento od un calo di Ω ; invece,
l’equilibrio è stabile se si ha, rispettivamente, un calo od un aumento di Ω . Questo perché, se ad una variazione di Ci
corrisponde una variazione di Ω nello stesso senso, il sistema si allontana dall’equilibrio, mentre se ad una variazione di
Ci corrisponde una variazione di Ω in senso opposto, il sistema torna al punto di equilibrio. In termini matematico, la
condizione precedente è espressa dalla disequazione dCi / dΩ < 0, ossia dCm / dΩ < dCf / dΩ , che ha una semplice
interpretazione grafica: la caratteristica meccanica del motore deve avere una pendenza inferiore alla caratteristica
meccanica del carico (Fig. 7a).
Ragionando in maniera analoga si ha che l’equilibrio è instabile se dCi / dΩ > 0, ossia dCm / dΩ > dCf / dΩ , cioè la
caratteristica meccanica del motore ha una pendenza superiore alla caratteristica meccanica del carico (Fig. 7b).
Va quindi sottolineato il fatto che la stabilità elettromeccanica di un sistema motore-carico non può essere giudicata
dalla sola caratteristica meccanica del motore, in quanto l'elemento determinante è la differenza tra le coppie motrice e
resistente che, per l’equazione di equilibrio, non può che tradursi in una coppia di inerzia, e quindi provocare
accelerazioni.
Fig. 7: Condizioni di equilibrio elettromeccanico stabile (a) ed instabile (b)
32
TIPI DI COPPIA ELETTROMAGNETICA
Si presentano i due tipi di coppia elettromagnetica esistenti, e si mostra come si particolarizzano nei due casi
significativi in cui la forma d’onda della alimentazione (in tensione o in corrente) è un’onda quadra o un’onda
sinusoidale.
Macchina ad una forza magnetomotrice: coppia di anisotropia, o di riluttanza
Si consideri un circuito magnetico come quelli mostrati in fig. 8, costituito da una parte fissa (statore) ed una rotante
(rotore), e sia θ l’angolo fra le due parti; su una delle due parti è posto un avvolgimento, il quale vede un circuito
magnetico anisotropo, cioè variabile con l’angolo di rotazione θ ; l’avvolgimento può stare su una struttura anisotropa
(fig. 8a, 8b) o isotropa (8c, 8d), l’importante è che non veda una struttura isotropa (fig 9a, 9b, 9c, 9d).
Il nucleo magnetico abbia permeabilità costante.
θ
θ
θ
•
θ
⊕
Fig 8: circuiti magnetici in cui, al variare di θ, la struttura dotata di avvolgimento vede un circuito anisotropo.
•
θ
θ
θ
θ
⊕
Fig 9: circuiti magnetici in cui, al variare di θ, la struttura dotata di avvolgimento vede un circuito isotropo.
d
(Li ) = Ri + L di + i dL che in termini di potenza diventa vi = Ri 2 + Li di + i 2 dL
dt
dt
dt
dt
dt
D’altra parte, l’energia accumulata nel campo magnetico per un generico valore di corrente i vale W = ½ L i2, e la
dW
d ⎛1
di 1 dL
⎞
= ⎜ Li 2 ⎟ = Li + i 2
.
potenza istantanea, cioè la variazione dell’energia, è pW =
dt
dt ⎝ 2
dt 2 dt
⎠
L’equazione del circuito è v = Ri +
di 1 2 dL 1 2 dL
+ i
+ i
,
dt 2 dt 2 dt
e i vari termini hanno il seguente significato: vi = potenza elettrica entrante, Ri2 = perdite,
1 dL
1 2 dL
i
= potenza scambiata col campo magnetico, + i 2
= potenza meccanica.
2 dt
2 dt
Mettendo ora in evidenza il fatto che l’induttanza varia ciclicamente con la rotazione, si ha
1 dL 1 2 dL dθ 1 2 dL
1 dL
= i
= i
Ω e la coppia motrice vale quindi C m = i 2
.
p mecc = i 2
2 dt 2 dθ dt 2 dθ
2 dθ
Come si vede dall’espressione, tale coppia esiste solo se il sistema è anisotropo, per cui dL / dθ ≠ 0: per questo è detta
coppia di anisotropia, o di riluttanza.
La potenza associata al circuito può allora essere espressa come vi = Ri 2 + Li
Macchina a due forze magnetomotrici: coppia di eccitazione, o di mutua induttanza
Si riconsiderino i circuiti magnetici precedenti, ma ora gli avvolgimenti siano posti su entrambe le parti. Sia 1
l’avvolgimento statorico e 2 quello rotorico. Per ora, non si consideri l’isotropia o l’anisotropia del circuito magnetico.
Le equazioni dei due avvolgimenti sono:
dL
di
dL
di
d
d
v1 = R1i1 + (L1i1 ) + (Lm i2 ) = R1i1 + L1 1 + i1 1 + Lm 2 + i2 m
dt
dt
dt
dt
dt
dt
di1
dLm
di2
dL2
d
d
v2 = R2i2 + (Lm i1 ) + (L2 i2 ) = R2 i2 + Lm
+ i1
+ L2
+ i2
.
dt
dt
dt
dt
dt
dt
Moltiplicando le due equazioni rispettivamente per i1 ed i2 si ottiene il bilancio di potenze, e sommando si ha la totale
potenza elettrica entrante.
1
1
L’energia magnetica immagazzinata è W = L1i1 2 + L2 i2 2 + Lm i1i2
2
2
33
dL
di1 1 2 dL1
di
dL
di
di
1
+ i1
+ L2 i2 2 + i2 2 2 + i1i2 m + Lm i2 1 + Lm i1 2 .
dt 2
dt
dt 2
dt
dt
dt
dt
Confrontando la totale potenza elettrica entrante con la variazione di energia immagazzinata nel campo, si ricava la
dL
dL
dL
1
1
potenza meccanica disponibile: pm = i1 2 1 + i2 2 2 + i1i2 m
dt
2
dt 2
dt
dL
dL
dL
1
1
Esprimendo le dL / dt come Ω dL / dθ , e dividendo per Ω, si ricava la coppia C m = i1 2 1 + i2 2 2 + i1i2 m .
dθ
2
dθ 2
dθ
I primi due termini sono coppie di anisotropia, e la loro presenza dipende dall’anisotropia delle strutture:
- se sia lo statore sia il rotore sono anisotropi (fig. 8a, 8b), sono presenti entrambi i termini;
- se lo statore è isotropo ed il rotore anisotropo (fig. 8d, 9d), si ha dL1 / dθ = 0 ;
- se lo statore è anisotropo ed il rotore isotropo (fig. 8c, 9c), si ha dL2 / dθ = 0 .
Il terzo termine è detto coppia di mutua induttanza, o coppia di eccitazione, perché dipende dal prodotto delle due
correnti e dalla variazione di mutua induttanza legata al reciproco movimento delle due bobine.
Nel caso di isotropia del circuito magnetico (fig. 9a, 9b) le due copie di riluttanza scompaiono, e rimane solo la coppia
di mutua induttanza, perché la variazione di Lm esiste comunque.
e la sua variazione è pW = L1i1
Caso 1: alimentazione con onda quadra di corrente
Se la corrente ha onda quadra, il suo valore è costante, dunque la coppi dipende solo dall’angolo θ fra gli assi magnetici
di statore e rotore.
1. Coppia di anisotropia.
Si considera un circuito magnetico con un solo avvolgimento, che vede un sistema anisotropo (uno dei casi di fig.8), e si
assume che l’induttanza dell’avvolgimento sia funzione sinusoidale dell’angolo θ secondo l’espressione
1
1
L1 = Ld 1 + Lq 1 + Ld 1 − Lq 1 cos(2 θ) , cioè L(θ) = Lo1 + ΔL1 cos(2θ) (Fig. 10).
2
2
(
) (
)
Fig. 10: andamento, in funzione di θ, dell’induttanza dell’avvolgimento che vede un circuito anisotropo.
L’espressione della coppia risulta quindi Cm = - i1 2 ΔL1 sin(2θ) . Si vede che Cm = 0 solo se θ = 0 . Ciò significa che in
ogni posizione θ ≠ 0 esiste una copia che riporta il sistema in θ = 0 . Questa posizione corrisponde al minimo traferro δ ,
e quindi al minimo volume di traferro Volδ . Ora, dato che μFe >> μo e Bfe ≈ Bδ , si ha che l’energia immagazzinata nel
traferro Wδ = Bδ2 / 2 μo sarà molto superiore all’energia immagazzinata nel ferro WFe = BFe2 / 2 μFe , cioè l’energia è
immagazzinata principalmente nel volume del traferro. Ne segue che il minimo del volume di traferro corrisponde al
minimo dell’energia immagazzinata nel sistema. Tutto ciò è coerente col fatto che ogni sistema energetico tende al
minimo di energia immagazzinata, e il sistema compie lavoro proprio per ridurre la propria energia e portarsi nelle
condizioni di minimo energetico.
Si riconosce quindi che la coppia di anisotropia risponde al principio del minimo energetico.
2. Coppia di eccitazione.
Si considera una macchina con entrambe le strutture (statore e rotore) isotrope (fig 9a o 9b), e con avvolgimenti su
entrambe le strutture, e si assume che la mutua induttanza è funzione sinusoidale dell’angolo θ secondo l’espressione
Lm = M cos(θ ) (Fig. 11)
Fig. 11: andamento, in funzione di θ, della mutua induttanza fra due avvolgimenti che vedono un circuito isotropo.
34
L’espressione della coppia risulta quindi Cm = - i1 i2 M sin(θ). Si vede che Cm = 0 solo se θ = 0 . Ciò significa che in
ogni posizione θ ≠ 0 esiste una copia che riporta il sistema in θ = 0 . Questa posizione è quella in cui gli assi magnetici
dei due avvolgimenti (cioè dei due campi) sono allineati. Questo è coerente col principio di allineamento delle fmm,
secondo cui, se due strutture ferromagnetiche libere di ruotare, sono sede di fmm, il sistema si porta nella posizione di
allineamento delle fmm. La motivazione fisica è che questa posizione è, ancora una volta, quella di minima energia.
Si riconosce quindi che la coppia di eccitazione risponde al principio di allineamento delle fmm.
Caso 2: alimentazione in regime sinusoidale
Nel seguito vengono considerati tre tipi di macchine monofase, con alimentazione in regime sinusoidale (può essere
impressa la tensione o la corrente, ma la forma d’onda è comunque sinusoidale): macchina a riluttanza (MR), macchina
sincrona (MS) isotropa, macchina asincrona (o ad induzione, MI) isotropa.
Calcolando l’espressione della coppia istantanea c(t), essa dipende dal prodotto di due funzioni sinusoidali, una di Ω t
(Ω = velocità di rotazione meccanica), l’altra di ωt (ω = pulsazione elettrica; in particolare, ωs = pulsazione delle
1
correnti di statore , ωr = pulsazione delle correnti di rotore). La coppia meccanica media è Cm.avg =
c ( τ ) dτ . Però,
T T
l’integrale del prodotto di due sinusoidi è diverso da zero solo se le sinusoidi hanno la stessa pulsazione. Ecco perché
per avere coppia media non nulla, deve essere Ω = ωs nel caso di MR e MS, e Ω = ωs - ωr nel caso di MI.
∫
1. Macchina a riluttanza.
Si tratta di una macchina con 1 solo avvolgimento, che vede un circuito magnetico anisotropo (uno dei casi di fig. 8).
Solitamente, l’avvolgimento è posto sullo statore (per non avere contatti rotanti), per cui delle 4 configurazioni di fig. 8
1 dL1 2
i1 .
si considerano solo la 8a o 8d. La coppia istantanea è quella di anisotropia c =
2 dθ
Si assume che l’induttanza è funzione sinusoidale dell’angolo θ secondo l’espressione L1 = Lo + 1 2 ⋅ ΔL cos(2θ) .
L’avvolgimento è alimentato con corrente alternata sinusoidale: i1 = √2 I1 cos(ω t), i2 = 0. La coppia istantanea risulta
1
1
1
1
⎛
⎞
c = -ΔL sin(2θ) ⋅ I12 cos 2 (ωt ) = - ΔL ⋅ I12 ( sin(2θ) + sin(2θ) cos(2ωt ) ) = - ΔL ⋅ I12 ⎜ sin(2θ) + sin(2θ + 2ωt ) + sin(2θ - 2ωt ) ⎟
2
2
2
2
⎝
⎠
Se la macchina ruota a velocità Ω , si può scrivere θ = Ω t - δ , e quindi la coppia risulta
1
1
1
⎛
⎞
c = - ΔL ⋅ I12 ⎜ sin(2Ωt − 2δ) + sin(2Ωt − 2δ + 2ωt ) + sin(2Ωt − 2δ - 2ωt ) ⎟ .
2
2
2
⎝
⎠
Calcolando il valor medio di tale espressione, si riconosce che esso è sempre nullo, a meno che scompaia la dipendenza
dal tempo; per ottenere ciò, deve essere verificata la condizione Ω = ω, cioè devono coincidere la velocità meccanica Ω
e la pulsazione elettrica ω. In tale condizione, la coppia istantanea risulta
1
1
1
⎛
⎞
2
c = - ΔL ⋅ I12 ⎜ sin(2ωt − 2δ) + sin(4ωt − 2δ) + sin(−2δ) ⎟ e la coppia media Cm.avg = 1 4 ⋅ Δ L⋅ I1 sin(2 δ) .
2
2
2
⎝
⎠
Ricordando che ΔL = Ld – Lq, questa espressione fa capire bene il significato del nome “coppia di anisotropia”, perché
si vede chiaramente che tale espressione risulta non nulla solo se Ld1 ≠ Lq1, cioè se esiste anisotropia nel circuito.
Questa macchina non si avvia da sola, ma bisogna portare il rotore alla velocità Ω = ω, perché si possa sviluppare una
coppia media non nulla.
2. Macchina sincrona isotropa monofase.
Si tratta di una macchina con entrambe le strutture (statore e rotore) isotrope (fig 9a o 9b), e con avvolgimenti su
dL
entrambe le strutture. Le autoinduttanze L1 L2 sono costanti, e quindi la coppia istantanea risulta c = i1i2 m .
dθ
Si assume che la mutua induttanza è funzione sinusoidale dell’angolo θ secondo l’espressione Lm = M cos(θ ) .
Si alimenta l’avvolgimento statorico 1 con una corrente alternata sinusoidale, e l’avvolgimento rotorico 2 con una
corrente costante: i1 = √2 I1 cos(ω t), i2 = iecc = cost.
1
⎛1
⎞
La coppia istantanea vale c = -√2 I1 iecc M sin(θ ) cos(ω t). = − 2 I1iecc M ⎜ sin(θ + ωt ) + sin(θ − ωt ) ⎟
2
⎝2
⎠
1
⎛1
⎞
Se la macchina ruota a velocità Ω , si ha θ = Ω t - δ, quindi c = − 2 I1iecc M ⎜ sin(Ωt − δ + ωt ) + sin(Ωt − δ − ωt ) ⎟ .
2
⎝2
⎠
Anche in questo caso, il valor medio è diverso da zero solo se scompare la dipendenza dal tempo, cioè se Ω = ω ; la
1
2
⎛1
⎞
coppia istantanea è c = − 2 I1iecc M ⎜ sin(2ωt − δ) + sin(−δ) ⎟ e la coppia media è Cm.avg =
MI1iecc sin(δ) .
2
2
⎝2
⎠
Anche qui, l’espressione fa capire bene il significato del nome “coppia di mutua induttanza”.
Anche questa macchina non si avvia da sola, ma bisogna portare il rotore alla velocità Ω = ω, perché si possa
sviluppare una coppia media non nulla.
35
3. Macchina asincrona monofase
La struttura è la stessa di quella del caso 2 (macchina sincrona monofase). Gli avvolgimenti siano alimentati da correnti
alternate sinusoidali a frequenza differente: i1 = √2 I1 cos(ω1t), i2 = √2 I2 cos(ω2t).
L’espressione della coppia istantanea è
dL
1
⎡1
⎤
c = i1i2 m = -2 I1I 2 M cos(ω1t ) cos(ω2 t ) sin(θ) = -2 I1 I 2 M sin(θ) ⎢ cos(ω1t + ω2t ) + cos(ω1t − ω2t ) ⎥ =
dθ
2
⎣2
⎦
.
1
1
1
⎡1
⎤
= - I1I 2 M ⎢ sin(θ + (ω1t + ω2t )) + sin(θ − (ω1t + ω2t )) + sin(θ + (ω1t − ω2 t )) + sin(θ − (ω1t − ω2t )) ⎥
2
2
2
⎣2
⎦
Se la macchina ruota a velocità Ω , si può scrivere θ = Ω t - δ , e quindi la coppia risulta
1
1
1
⎡1
⎤
c = - I1I 2 M ⎢ sin(Ωt − δ + (ω1t + ω2t )) + sin(Ωt − δ − (ω1t + ω2 t )) + sin(Ωt − δ + (ω1t − ω2t )) + sin(Ωt − δ − (ω1t − ω2t )) ⎥
2
2
2
⎣2
⎦
Il valor medio è diverso da zero solo se scompare la dipendenza dal tempo, cioè se si verifica uno delle seguenti casi:
Ω t = - (ω1t + ω2 t )
Ω t = (ω1t + ω2 t )
Ω t = - (ω1t - ω2 t )
Ω t = (ω1t - ω2 t ),
ossia (a) Ω = ± (ω1 + ω2 ) oppure (b) Ω = ± (ω1 - ω2 ). Considerando che le frequenze non possono essere negative,
la condizione (a) si riduce a Ω = ω1 + ω2 e la condizione (b) si riscrive come Ω = | ω1 - ω2 | .
La coppia istantanea risulta perciò nei due casi
1
1
1
⎡1
⎤
c = - I1I 2 M ⎢ sin(2(ω1 + ω2 )t − δ) + sin(−δ) + sin(2ω1t − δ) + sin(2ω2t − δ) ⎥
2
2
2
⎣2
⎦
1
1
1
⎡1
⎤
c = - I1I 2 M ⎢ sin(2ω1t − δ) + sin(−2ω2 t − δ) + sin(2(ω1 − ω2 )t − δ) + sin(−δ) ⎥
2
2
2
⎣2
⎦
1
Per entrambi i casi, il valor medio della coppia è Cm.avg = MI1I 2 sin(δ) .
2
Anche questa è una coppia di mutua induttanza.
La trattazione svolta per macchina monofase, vale anche per macchina trifase, perché (avendo supposto linearità
magnetica), basta applicare la sovrapposizione degli effetti, facendo agire una coppia di bobine per volta (una di statore
ed una di rotore. Quindi le condizioni essere Ω = ωs e Ω = ωs - ωr valgono anche per MS, MR, MI trifase.
D’altra parte, studiando il campo rotante, si è visto che un sistema trifase di correnti equilibrate di pulsazione ω
generano un campo rotante a velocità ω (meglio, ω 2/p). Allora, in tutte le macchine trifasi, le correnti statoriche
generano un campo rotante statorico a velocità ωs . In una MR, c’è solo tale campo, e la condizione Ω = ωs va letta nel
senso che il campo deve essere sincrono col rotore. In una MS, c’è anche un campo rotorico, fisso rispetto al rotore, e
rotante a velocità Ω rispetto allo statore; allora, la condizione Ω = ωs va letta nel senso che i due campi devono essere
sincroni. In una MI, c’è anche un campo rotorico, che ruota a ωr rispetto al rotore, e a ωr + Ω rispetto allo statore;
allora, la condizione Ω = ωs - ωr , ossia ωs = ωr + Ω , va letta nel senso che i due campi devono essere sincroni.
Quindi, in tutti i casi, la condizione perché la coppia media sia non nulla (ossia, perché ci possa essere trasferimento
energetico fra statore e rotore) è il sincronismo fra i campi di statore e rotore (o, fra campo e rotore nella MR).
NOTA BENE: si osservi che le macchine trifasi sono decisamente migliori delle monofasi, perché nelle monofasi,
anche in condizioni di sincronismo, la coppia istantanea è sinusoidale, il che significa che la coppia è alternativamente
motrice e frenante, provocando pericolose sollecitazioni meccaniche; nelle trifasi invece, in sincronismo la potenza
istantanea è costante, e quindi anche la coppia è costante, evitando quindi le sollecitazioni meccaniche
(Ovviamente, se non si è in sincronismo, anche nelle macchine trifasi la coppia istantanea è sinusoidale)
36
GIUNTO ELETTROMAGNETICO (calcolo della coppia scambiata)
Si riprenda in considerazione la struttura meccanica analizzata per lo studio del campo magnetico rotante: due cilindri
ferromagnetici, uno pieno (raggio Rp) e l’altro cavo (raggio interno Rc), il cilindro pieno avente raggio poco inferiore al
cilindro cavo (Rp ≈ Rc, Rp < Rc), in modo che se vengono messi uno interno all’altro e coassiali, sono separati solo da
un piccolo spessore d’aria, che prende il nome di traferro δ; le superfici prospicienti al traferro sono dotate di cave, per
alloggiare dei conduttori elettrici che poi vengono collegati fra loro per creare un avvolgimento (i collegamenti sono
fatti sulle facce anteriori e posteriori dei cilindri).
δ
δ
⊕
•
Rc
Rp
⊕
⊕
⊕
•
•
•
Si supponga che su entrambe le strutture sia presente un avvolgimento
θe
Ni •
monofase; uno dei due avvolgimenti (solitamente posto sul cilindro interno)
θi
•
•
R
e
è detto “di eccitazione”, ha Ne spire, è percorso da una corrente ie (sarà
•
•
indicato con e); l’altro avvolgimento (solitamente posto sul cilindro esterno)
• N
e
θ
è detto “di indotto”, ha Ni spire, è percorso da una corrente ii (sarà indicato
con i). Siano Ri ed Re gli assi magnetici rispettivamente degli avvolgimenti i
Ri
ed e (la direzione dell’asse magnetico è legato al verso di percorrenza della
⊕
corrente nell’avvolgimento sempre dal legame corrente-flusso, cioè dalla
⊕ ⊕
⊕
⊕
regola della mano destra); siano θi e θe le coordinate angolari misurata in
⊕
senso antiorario rispettivamente a partire da Ri ed Re ; sia θ l’angolo fra Ri ed
Re; risulta ovviamente θi = θ + θe.
Si è visto che un avvolgimento monofase di N spire, percorso da corrente i, genera un campo magnetico b(θ) a
distribuzione spaziale sinusoidale, con valore massimo BM = μo HM = Ni μo / δ. I campi dei due avvolgimenti sono
be(θe) = Be cos (θe)
con
Be = N e i e μo / δ.
quindi: bi(θi) = Bi cos (θi) con Bi = N i i i μo / δ
Come già visto, l’ampiezza del campo è proporzionale al valore della corrente: se la
corrente è costante nel tempo, l’ampiezza del campo è costante; se la corrente è
sinusoidale, l’ampiezza varia sinusoidalmente nel tempo (e si ha quello che è
definito campo pulsante). Come visto, i campi sono rappresentabili con un vettore di
modulo BM , che ha per direzione l’asse della bobina, e per verso quello legato al
verso della corrente dalla regola della mano destra.
•
•
•
⊕
•
•
•
⎯Be
Re
θ
⊕
⊕
⊕
⊕
⎯Bi
Ri
⊕
Sperimentalmente si osserva che quando gli avvolgimenti sono percorsi da corrente, le due strutture ruotano in modo
tale che i due vettori campo magnetico si sovrappongano: questo significa che fra le due strutture meccaniche si sta
esercitando una coppia. Si vuole ricavare l’espressione di tale coppia. A tal fine, si ricorda quanto visto nello studio dei
circuiti magnetici: la forza magnetica Fm esercitata fra due strutture magnetiche è esprimibile come la derivata
(cambiata di segno) dell’energia magnetica Wm immagazzinata nel campo, rispetto alla coordinata geometrica x nella
cui direzione avviene lo spostamento; l’energia magnetica Wm è l’integrale di volume della densità di energia σm, esteso
al volume dove si sviluppa il campo; la densità di energia è σm = b2 / 2μ; dato che la permeabilità del ferro è molto alta,
la densità di energia nel ferro è piccola, e l’energia è praticamente immagazzinata solo nell’aria, quindi tutto il calcolo
va riferito all’induzione nell’aria e al volume dell’aria, ossia al traferro presente fra le strutture. Nel caso di strutture
rotanti, la forza è sostituita dalla coppia, e la coordinata x dalla coordinata θ lungo cui si ha la rotazione.
F =−
∂Wm
∂x
Wm = ∫∫∫
Vol .traf
σ m.traf dVtraf = ∫∫∫
Vol .traf
btraf 2
2μ o
dVtraf
C=−
∂Wm
∂θ
Nel caso della struttura considerata, detto D il diametro della circonferenza nel traferro, e detta ℓ la lunghezza assiale
dei due cilindri, il volume del traferro risulta Vtraf = π D ℓ δ e il suo differenziale è dVtraf = D ℓ δ dθi /2 = D ℓδ dθe /2
(dθi*D/2 = dθe*D/2 è la lunghezza di un tratto infinitesimo di circonferenza, ed è uguale se valutata con θi o con θe).
L’induzione risultante nel traferro btraf è data dalla somma dei due campi: btraf = bi(θi) + be(θe) .
Nel seguito si considera la coppia agente sulla struttura i, perciò si esprime tutto in funzione di θi :
btraf (θi) = bi(θi) + be(θi - θ)
dVtraf = D l δ dθi /2.
Si ottiene quindi:
37
C=−
=−
btraf 2
∂Wm
∂
∂ 2π 1
2 D
dVtraf = − ∫
B i cos(θi ) + B e cos(θi − θ)}
l δd θ i =
= − ∫∫∫
{
∂θ
∂θ Vol .traf 2μ o
∂θ 0 2μ o
2
{
}
D lδ ∂ 2 π
2
2
[ B i cos(θi )] + [ B e cos(θi − θ)] + [ 2 B i cos(θi ) B e cos(θi − θ)] d θi
2 2μ o ∂θ ∫0
Trasformando i termini cos2 e applicando le formule di Prostaferesi al prodotto di coseni si ha:
Be
D lδ ∂ 2π ⎧ B i
1
[1 + cos 2(θi − θ)] + 2 B i Be [cos(2θi − θ) + cos(θ)]⎫⎬d θi
⎨ [1 + cos(2θi ) ] +
∫
0
2 2μ o ∂θ
2
2
⎩2
⎭
I termini cos(2θi )
cos 2(θi − θ)
cos(2θi − θ) quando sono integrati fra 0 e 2π danno risultato nullo; i termini
C=−
costanti, se integrati, rimangono costanti, per cui la derivata rispetto a θ è nulla; l’unico termine significativo è cos (θ).
Allora C = −
B B
B B
D lδ ∂ 2 π
D lδ
∂
B i Be cos(θ)d θi = −
B i Be cos(θ)2π = πDlδ i e sin(θ) = Voltraf i e sin(θ)
∫
0
2 2μ o ∂θ
2 2μ o
2μ o
2μ o
∂θ
Quindi la coppia è proporzionale al valor massimo dei due campi e al seno dell’angolo compreso. Il segno positivo dice
che la coppia è nel verso positivo dell’angolo θ: infatti il cilindro i ruota nel senso positivo di θ per far sì che⎯Bi si
sovrapponga a⎯Be .(Se si calcolava la coppia agente sulla struttura e, si sarebbe ottenuto un segno negativo, cioè
B i Be
sin(θ) . Questo perché la coppia agente sulla struttura e agisce nel verso negativo dell’angolo θ:
2μ o
infatti il cilindro e ruota nel senso negativo di θ per far sì che⎯Be si sovrapponga a⎯Bi ).
C = −Voltraf
Quando i due campi sono allineati, θ = 0, quindi C = 0, cioè le due strutture non si scambiano coppia. In queste
condizioni, se la struttura i è posta in rotazione lentamente, la struttura e la segue, perché i due campi tendono a
rimanere allineati. Infatti, se per ipotesi⎯Bi si allontanasse da⎯Be , l’angolo θ non sarebbe più nullo, e quindi nascerebbe
una coppia che tende ad allineare i campi.
A questo punto, se alla struttura i è applicata una coppia motrice Cmot di valore C* e
alla struttura e una coppia resistente Cres di pari valore, si ha che la struttura i inizia
ad accelerare, e la e a rallentare, quindi⎯Bi e⎯Be si sfasano; ma allora l’angolo θ
aumenta, e con esso aumenta la coppia elettromagnetica Cem che le strutture si
⎯Be
Cres
scambiano. Si osservi che tale coppia tende ad avvicinare le strutture, quindi agisce
sulla i per frenarla (quindi è opposta alla Cmot), e sulla e per accelerarla (quindi è
θ
opposta alla Cres).
⎯Bi
Cem
Ad un certo punto, lo sfasamento fra⎯Bi e⎯Be sarà pari ad un angolo γ tale che
Cmot
Voltraf
B i Be
sin( γ ) = C * . Allora su entrambe le strutture agisce una coppia risultante
2μ o
nulla, per cui esse si muovono di moto circolare uniforme, cioè ruotano a velocità
costante, uguale per entrambe le strutture, e si mantengono sfasate di γ.
Si è quindi realizzato una sorta di “ingranaggio magnetico”, che consente di trasferire coppia fra due strutture (ecco
perché questo sistema viene chiamato”giunto elettromagnetico”). Ovviamente, tutto funziona se C* è inferiore al valore
massimo della coppia elettromagnetica (che si ottiene quando γ = 90°), cioè C* < CemMAX = Voltraf Bi Be / 2μo . Se C*
supera tale valore, non è più possibile un equilibrio fra la coppia elettromagnetica e quella meccanica, perciò la struttura
e rallenta fino a fermarsi, e la struttura i accelera indefinitamente.
Ora, si consideri la seguente osservazione: la struttura i riesce a far ruotare la struttura e perché il campo⎯Bi trascina il
campo⎯Be , cioè ciò che conta è la rotazione del campo ⎯Bi , non della struttura i. Allora, nell’analisi condotta, nulla
cambierebbe se⎯Bi fosse posto in rotazione in altro modo; in particolare, nello studio del campo rotante si è visto che è
possibile ottenere un campo rotante ⎯Bi tramite un avvolgimento trifase (3 avvolgimenti monofasi sfasati di 120°),
percorso da un sistema trifase di corrente (3 correnti sfasate di 120° nel tempo). In questo caso, nel sistema non è
immessa potenza meccanica (perché non c’è una coppia motrice Cmot che fa ruotare la struttura i), ma è immessa
potenza elettrica (il sistema trifase di correnti); d’altra parte, il campo⎯Bi trascina il campo⎯Be , il quale trascina in
rotazione la struttura e, a cui è applicata una coppia meccanica resistente Cres, quindi si sta compiendo un lavoro. Si è
quindi realizzato un motore elettrico, cioè un sistema che converte potenza elettrica in meccanica. Su questo principio si
basa il funzionamento del motore sincrono.
38