APPUNTI DI MATEMATICA
Corso di Laurea: Scienza e Tecnologia per la Diagnostica e la
Conservazione dei Beni Culturali
A.A. 2008/2009
Prof.: L. Palese
2
I PARTE
VETTORI NELLO SPAZIO FISICO
Consideriamo un sistema di riferimento cartesiano {O, x, y, z} nello spazio
fisico, caratterizzato da un’origine O e da tre assi mutuamente ortogonali: x,
y, z, uscenti da O.
Ogni punto P dello spazio sarà univocamente individuato da una terna di
coordinate cartesiane (x, y, z), costituita da una terna ordinata di numeri reali,
detti rispettivamente ascissa, ordinata e quota.
Se A (xA, yA, zA) e B (xB, yB, zB) sono due punti dello spazio, chiamiamo
vettore di estremi A e B il segmento orientato che va da A verso B, e
scriveremo AB, oppure B-A.
A rappresenta l’origine e B l’estremo del vettore.
Talvolta denotiamo un vettore di estremi A e B con una lettera minuscola in
grassetto, o sottolineata, ponendo v ≡ B-A ≡ v
Questa rappresentazione di un vettore come differenza di due punti si
definisce notazione di Grassmann.
Il modulo di un vettore v, che indicheremo con |v|, oppure |AB|, oppure con la
lettera minuscola v non sottolineata o non in grassetto, è dato dalla distanza
fra i punti A e B.
Quindi risulta
|AB| =
xB − xA
2
+ yB − yA
2
+ zB − zA
2
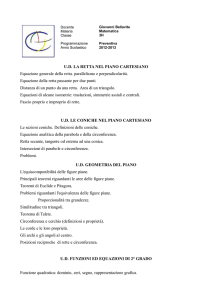
Le componenti (vx, vy, vz) di un vettore v in un sistema di riferimento
cartesiano sono date dalle differenze fra le coordinate omonime dei punti A e
B che rappresentano l’origine e l’estremo del vettore.
vx = xB - xA
vy = yB - yA
vz = zB - zA
3
z
B
vz
A
O
y
vy
vx
x
Due vettori sono uguali se hanno le stesse componenti.
La direzione del vettore v ≡ B – A è quella della retta contenente i punti A e B,
il verso è quello che va da A verso B.
Osserviamo quindi che un vettore è univocamente individuato, in un sistema
di riferimento cartesiano, se sono note le sue tre componenti, o,
equivalentemente, se ne conosco modulo, direzione e verso.
4
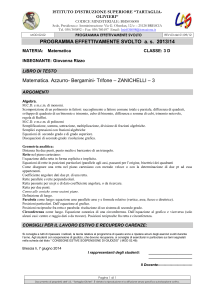
Somma di due vettori
Se v e w sono due vettori, di componenti rispettivamente (vx, vy, vz) e (wx, wy,
wz), si definisce somma di v e w, e si indica con v + w, il vettore le cui
componenti sono date dalla somma delle componenti omonime dei due
vettori.
C
v-w
w
A
v
B
Osserviamo che dalla definizione di somma di due vettori segue che se
v = B – A, w = C – B,
v + w = A – C ≡ (A – B) + (B – A)
come è possibile verificare immediatamente considerando le componenti;
quindi, scrivendo un vettore come differenza di due punti è possibile
aggiungere e sottrarre un altro punto arbitrario, senza modificare il vettore.
Prodotto di un vettore per un numero reale
Il prodotto di un vettore v per un numero reale a, è il vettore w che ha come
componenti il prodotto delle componenti del vettore di partenza per il numero
a.
Quindi, se: v (vx, vy, vz) allora w (avx, avy, avz).
5
Rappresentazione cartesiana di un vettore
Consideriamo in un fissato sistema di riferimento cartesiano, tre punti
P1 (1, 0, 0)
P2 (0, 1, 0)
P3 (0, 0, 1)
e i tre vettori aventi origine in O ed estremi coincidenti con i punti P1, P2, P3.
Poniamo:
i = P1 – O
j = P2 – O
k = P3 – O
Vediamo come esprimere un qualunque vettore dello spazio fisico mediante i
vettori i, j, k.
Infatti consideriamo, per esempio un vettore v (vx, vy, vz), con:
vx = 3
vy = 5
vz = 7
La seguente combinazione lineare dei vettori i, j, k (dove per combinazione
lineare di tre o più vettori si intende la somma dei prodotti dei vettori
moltiplicati per numeri reali, detti coefficienti)
3i + 5j + 7k
è un vettore le cui componenti (wx, wy, wz) saranno date dalle somme delle
componenti omonime dei singoli vettori:
wx = 3∙1 + 5∙0 + 7∙0 = 3
wy = 3∙0 + 5∙1 + 7∙0 = 5
wz = 3∙0 + 5∙0 + 7∙1 = 7
quindi wx=3, wy=5, wz=7, cioè il vettore ottenuto è identico al vettore v, poiché
ha le stesse componenti.
6
Questo ragionamento, che potrebbe essere ripetuto prescindendo
dall’esempio particolare considerato, mostra che ogni vettore dello spazio
fisico può essere rappresentato come combinazione lineare dei tre vettori i, j,
k e tale rappresentazione è unica, in quanto i coefficienti della combinazione
lineare sono proprio le componenti del vettore.
Questa proprietà fondamentale dei tre vettori {i, j, k} si esprime dicendo che
tali vettori costituiscono una base dello spazio fisico.
Definiamo quindi base dello spazio fisico un insieme di tre vettori che godono
della seguente proprietà:
ogni vettore dello spazio fisico può essere espresso in uno ed un sol modo
come loro combinazione lineare.
Osservazione:
Se consideriamo il vettore nullo 0, le cui componenti sono tutte nulle, avremo
0 = 0i + 0j + 0k
Viceversa, se un vettore v coincide con il vettore nullo, allora tutte le sue
componenti saranno nulle, quindi esso sarà del tipo
0i + 0j + 0k
Questo evidenzia che una combinazione lineare dei tre vettori i, j, k, è nulla
se e soltanto se tutti i coefficienti della combinazione lineare sono uguali a
zero.
Un insieme di vettori che gode di tale proprietà si definisce sistema di vettori
linearmente indipendenti, secondo la seguente
Definizione:
Un insieme di vettori costituisce un sistema di vettori linearmente indipendenti
quando una loro combinazione lineare è nulla se e soltanto se tutti i
coefficienti sono nulli.
7
Dalla precedente definizione si comprende facilmente che i vettori {i, j, k}
costituiscono un esempio di sistema di vettori linearmente indipendenti.
Osservazione:
Nello spazio fisico possiamo trovare un numero di vettori linearmente
indipendenti maggiore di tre?
Consideriamo a tal fine 4 vettori i, j, k, v e verifichiamo se possono essere
vettori linearmente indipendenti.
Se i quattro vettori considerati fossero linearmente indipendenti, allora ogni
loro combinazione lineare potrebbe essere nulla se e solo se i coefficienti
fossero tutti nulli, ma vediamo che non è così, perché se poniamo
ai + bj + ck + dv = 0
allora se
d≠0
possiamo dividere per d e ottenere:
v=-
a
d
i-
b
d
j-
c
d
k
e verificare immediatamente che i vettori considerati non sono linearmente
indipendenti.
Quindi il numero massimo di vettori linearmente indipendenti nello spazio
fisico è tre.
La base {i, j, k} è costituita quindi da tre (numero massimo) vettori
linearmente indipendenti.
8
ESERCIZI
ESERCIZIO 1
Verificare che i vettori di una base nello spazio fisico non possono essere
complanari.
ESERCIZIO 2
Verificare che i vettori di componenti (1, 0, 0), (1, 1, 0), (0, 1, 0) non possono
costituire una base.
ESERCIZIO 3
Se v (1, -1, 4), w (2, 3, 5), determinare le componenti di v + w rispetto alla
base {i, j, k}.
ESERCIZIO 4
I vettori i + j, j + k, i + k costituiscono una base dello spazio fisico?
9
ESERCIZIO
Consideriamo i vettori:
v (2, 5, 7)
i (1, 0, 0)
j (0, 1, 0)
k (0, 0, 1)
verifichiamo che una loro combinazione lineare può essere nulla cioè
possiamo avere, ai + bj + ck + dv = 0, pur non essendo i coefficienti tutti nulli.
Dimostriamo cioè che i quattro vettori considerati non possono essere
linearmente indipendenti.
SVOLGIMENTO
Calcoliamo le componenti del vettore al primo membro:
a ∙ (1, 0, 0)
ai = (a, 0, 0)
b ∙ (0, 1, 0)
bj = (0, b, 0)
c ∙ (0, 0, 1)
ck = (0, 0, c)
d ∙ (2, 5, 7)
dv = (2d, 5d, 7d)
La somma delle componenti dei singoli vettori sarà la componente del vettore
somma che è nullo se e solo se tutte le componenti sono nulle;
a + 0 + 0 + 2d = 0
0 + b + 0 + 5d = 0
0 + 0 + c + 7d = 0
a + 2b = 0
b + 5d = 0
c + 7d = 0
a+2b=0
b=−5d
c= −7d
a=−2b
5d=−b
7d=−c
Tali uguaglianze sono soddisfatte qualunque siano i numeri reali b e c,
verificanti l’uguaglianza 7b=5c (devono essere verificate le ultime due
uguaglianze).
Non è vero quindi che
ai + bj + ck + dv = 0
a=b=c=d=0
Abbiamo così verificato che i quattro vettori non sono linearmente
indipendenti.
10
MATRICI QUADRATE E RETTANGOLARI
Una matrice A a tre righe e quattro colonne è la figura formata da 3 X 4
numeri (detti elementi di matrice), disposti su 3 righe e 4 colonne.
A=
a11
a21
a31
a12
a22
a32
a13
a23
a33
a14
a24
a34
→ I riga
↓
I colonna
Per esprimere la circostanza che la matrice A è caratterizzata da 3 righe e 4
colonne, scriviamo:
A (3, 4)
Ogni elemento della matrice è caratterizzato da due indici, il primo è l’indice
di riga, il secondo è l’indice di colonna.
Per esempio:
a12 → Indice colonna
↓
Indice riga
è l’elemento della prima riga e della seconda colonna.
Definizione:
Una matrice è rettangolare se il numero delle righe è diverso dal numero di
colonne.
Una matrice è quadrata se il numero delle righe è uguale al numero di
colonne.
Due matrici si dicono simili se hanno lo stesso numero di righe e di colonne.
Una matrice A ad n righe e m colonne si denota con il simbolo A (n, m).
11
Operazioni con matrici
Se due matrici A e B sono simili, è possibile definire la matrice somma
(A+B), come la matrice il cui elemento generico di posto i, j è ottenuto
sommando gli elementi di ugual posto delle due matrici A e B.
Esempio:
Somma di due matrici
A (3, 4)
A=
a11
a21
a31
a12
a22
a32
A+B=
a13
a23
a33
a14
a24
a34
a11+b11
a21+b21
a31+b31
B (3, 4)
B=
a12+b12
a22+b22
a32+b32
b11
b21
b31
a13+b13
a23+b23
a33+b33
b12
b22
b32
b13
b23
b33
b14
b24
b34
a14+b14
a24+b24
a34+b34
Prodotto di una matrice A per un numero reale a
Per effettuare il prodotto di una matrice
moltiplicare ogni elemento della matrice
matrice
a∙a11
a∙a12
a∙a22
a ∙ A = a∙a21
a∙a31
a∙a32
A per un numero reale a basta
A per il numero a, ottenendo la
a∙a13
a∙a23
a∙a33
a∙a14
a∙a24
a∙a34
12
Determinante
Ad ogni matrice quadrata (solo quadrata) è possibile associare uno scalare,
detto determinante della matrice, nel modo seguente.
Cominciamo con il considerare una matrice A (2, 2)
a11
a21
A=
a12
a22
Si definisce determinante di A, e si denota con det A, il numero
det A = a11a22 – a12a21
Per una matrice quadrata A di ordine 3 il determinante della matrice
A=
a11
a21
a31
a12
a22
a32
a13
a23
a33
a11
a21
a31
a12
a22
a32
è dato dalla somma dei prodotti degli elementi che si trovano sulla stessa
“freccia” con il loro segno per le frecce volte verso il basso, e con il segno
opposto per le frecce volte verso l’alto.
Avremo quindi
(a11 ∙ a22 ∙ a33) + (a12 ∙ a23 ∙ a31) + (a13 ∙ a21 ∙ a32)
-(a13 ∙ a22 ∙ a31) + (a11 ∙ a23 ∙ a32) + (a12 ∙ a21 ∙ a33)
Vediamo come è possibile generalizzare la definizione di determinante di una
matrice quadrata in maniera tale da poter definire tale numero in maniera
univoca qualunque sia l’ordine della matrice.
Osserviamo che possiamo scrivere anche:
det A = a11 (a22 ∙ a33 – a23 ∙ a32) -a12 (a21 ∙ a33 – a23 ∙ a31) + a13 (a21 ∙ a32 – a22 ∙ a31)
13
Abbiamo quindi scritto il determinante di A come la somma dei prodotti degli
elementi a11, a12, a13 della prima riga per C11, C12, C13, dati da
C11 = a22a33 – a23a32, C12 = a21a33 – a23a31, C13 = a21a32 – a22a31, con C11 e
C13 determinanti delle matrici ottenute da A eliminando la riga e la colonna
che contengono a11 e a13 rispettivamente, C12 è l’opposto del determinante
della matrice ottenuta eliminando la prima riga e la seconda colonna, ovvero
la riga e la colonna contenenti a12.
Possiamo a questo punto calcolare il determinante di una matrice quadrata di
qualunque ordine.
Premettiamo alcune definizioni:
Definizione:
Si definisce minore complementare dell’elemento (i, j) di una matrice il
determinante ottenuto eliminando dalla stessa matrice quadrata la riga e la
colonna a cui appartiene l’elemento di posto i, j.
Per esempio il minore complementare dell’elemento di posto (1, 1) è dato da
Mij =
a22
a32
a23
a33
Definizione:
Il complemento algebrico Cij dell’elemento di matrice di posto (i, j) è il
minore complementare preso con il suo segno se l’elemento è di posto pari
(cioè i + j è un numero pari) o con il segno opposto se l’elemento di matrice è
di posto dispari (i + j è un numero dispari).
14
a22
a32
C11 =
a23
a33
(=M11)
1 + 1 = 2 (pari)
C12 =
a21
a31
a23
a33
(= -M12)
1 + 2 = 3 (dispari)
Il complemento algebrico coincide
con il minore complementare
Il
complemento
algebrico
è
l’opposto
del
minore
complementare
Abbiamo così verificato, nel caso di una matrice quadrata 3 X 3, la
seguente
Regola di Laplace per il calcolo del determinante di una matrice
quadrata:
Il determinante di una matrice quadrata di qualsiasi ordine è la somma dei
prodotti degli elementi di una qualsiasi riga e colonna per i rispettivi
complementi algebrici.
Esempio:
Calcolare il determinante della seguente matrice quadrata.
A=
1
2
6
3
7
8
5
4
3
Calcolo del minore complementare Mij e del complemento algebrico Cij
dell’elemento di posto ij.
Considero a11 poiché 1 + 1 = 2 (pari) l’elemento a11 è di posto pari e si ha:
M11 = C11
15
Analogamente, poichè 1 + 2 = 3 (dispari) l’elemento a12 è di posto dispari e si
ha: M12 = - C12. Alla stessa maniera abbiamo:
M13 = C13, M21 = - C21, M22 = C22, M23 = - C23, M31 = C31, M32 = - C32M33 = C33
1
2
6
3
7
8
5
4
3
A=
1
2
6
3
7
8
5
4
3
A=
1
2
6
3
7
8
5
4
3
A=
1
2
6
3
7
8
5
4
3
A=
1
2
6
3
7
8
5
4
3
A=
1
2
6
3
7
8
5
4
3
A=
1
2
6
3
7
8
5
4
3
A=
1
2
6
3
7
8
5
4
3
A=
1
2
6
3
7
8
5
4
3
A=
7
4
8
3
2
4
6
3
2
7
6
8
3
5
8
3
1
5
6
3
1
3
6
8
M31 = C31 =
3
7
5
4
= (3 ∙ 4) – (5 ∙ 7) = -23
M32= -C32 =
1
2
5
4
= (1 ∙ 4) – (5 ∙ 2) = -6
M33 = C33 =
1
2
3
7
= (1 ∙ 7) – (3 ∙ 2) = 1
M11 = C11=
M12 = -C12=
M13 = C13=
M21 = -C21=
M22 = C22=
M23 = -C23=
= (7 ∙ 3) – (8 ∙ 4) = -11
= (2 ∙ 3) – (4 ∙ 6) = -18
= (2 ∙ 8) – (7 ∙ 6) = -26
= (3 ∙ 3) – (5 ∙ 8) = -31
= (1 ∙ 3) – (5 ∙ 6) = -27
= (1 ∙ 8) – (3 ∙ 6) = -10
16
Osserviamo che se una matrice quadrata ha due righe o due colonne uguali,
il suo determinante sarà uguale a zero.
Esempio:
Consideriamo la matrice
A=
1
3
3
2
-1
-1
0
4
4
det A = 1 (- 4 + 4) – 2 (- 3 + 3) = 0
Quindi se in una matrice A ad una riga aggiungiamo una combinazione
lineare delle rimanenti, il determinante non cambia.
Infatti, considerando la matrice
B=
0
1
2
1
2
0
3
1
-1
det B = 1 (-1 -2) + 3 (-4) = 3 – 12 = -9
o la matrice C ottenuta da B sostituendo all’ultima riga la somma delle sue
righe
C=
0
1
3
1
2
3
3
1
3
det C = -1 (3 - 3) + 3 (3 - 6) = -9
si verifica facilmente che, moltiplicando tutti gli elementi di una riga o di una
colonna di una matrice quadrata per un numero a, anche il determinante
risulta moltiplicato per a.
17
Definizioni:
Matrice trasposta
Si definisce matrice trasposta AT di una matrice A, la matrice ottenuta da A
scambiando righe con colonne.
Matrice complementare
Si definisce matrice complementare AC di una matrice A, la matrice ottenuta
da A sostituendo ad ogni elemento di A il suo complemento algebrico.
Matrice non singolare
Si definisce non singolare una matrice A il cui determinante sia diverso da
zero.
Matrice inversa di una matrice non singolare A
Si definisce matrice inversa di una matrice A non singolare la matrice
(AC)T
A =
det A
-1
Esempio:
Determiniamo la matrice inversa di A.
A=
1
0
1
2
-1
2
3
4
0
det A = 1 (- 8) – 2 (- 4) + 3 (1) = - 8 + 8 + 3 = 3 ≠ 0
18
Costruiamo la matrice inversa di A.
Detto Cij il complemento algebrico dell’elemento di posto ij, abbiamo:
C11 = - 8
C12 = 4
C13 = 1
C21 = 6
C22 = - 3
C23 = 0
C31 = 11
C32 = - 4
C33 = - 1
Scriviamo la matrice inversa ottenuta
8
3
6
3
11
3
4
3
3
3
4
3
1
3
0
1
3
A-1 =
19
Prodotto righe per colonne fra due matrici A e B
Si definisce matrice prodotto righe per colonne di due matrici A e B dello
stesso ordine, la matrice A∙B il cui generico elemento di posto i, j, è dato dalla
somma dei prodotti degli elementi della riga i-esima per la colonna j-esima.
Esempio:
Effettuiamo il prodotto righe per colonne della matrice A dell’esercizio
precedente per A-1, denotiamo con Pij il generico elemento della matrice A∙A-1
−8
4
1 −8 8
P11 = 1 ∙ ( ) + 2 ∙ + 3 ∙ =
+ +1=1
3
3
3 3 3
P12 = 1 ∙
P13 = 1 ∙
6
3
+2∙(
−3
3
)+3∙0=
6 6
- =0
3 3
11
−4
−1 11 8 3
+2∙( )+3∙( )=
- - =0
3
3
3
3 3 3
−8
4
1
4 4
P21 = 0 ∙ ( ) – 1 ∙ ( ) + 4 ∙ = - + = 0
3
3
3
3 3
P22 = 0 ∙
P23 = 0 ∙
6
−3
-1∙( )+4∙0=1
3
3
11
−4
−1 4 4
-1∙( )+4∙( )= - =0
3
3
3
3 3
−8
4
1
8 8
P31 = 1 ∙ ( ) + 2 ∙ ( ) + 0 ∙ ( ) = - + = 0
3
3
3
3 3
6
6
P32 = 1 ∙ ( ) + 2 ∙ (-1) + 0 ∙ 0 = - 2 = 0
3
3
P33 = 1 ∙
11
−4
+2∙( )=1
3
3
20
Osserviamo che il prodotto righe per colonne
1
0
0
0
1
0
0
0
1
-1
A∙A =
Se si effettua quindi il prodotto righe per colonne di una matrice A per la sua
inversa A-1 otteniamo
(A ∙ A-1) = I
dove I è la matrice identità, che ha tutti gli elementi nulli, ad eccezione di
quelli della diagonale principale che sono uguali ad 1.
Inoltre si dimostra che, qualunque sia la matrice non singolare A, risulta:
det A ∙ det A-1 = 1
Dalla relazione A ∙ A-1 = I, segue che:
det (A ∙ A-1) = I
quindi abbiamo:
det (A∙A-1) = det A ∙ det A-1
il determinante del prodotto coincide con il prodotto dei determinanti.
21
Matrice rettangolare: Concetto di rango
Diamo ora la definizione di rango di una matrice rettangolare A (n, m).
Si dice che la matrice A (n, m) ha rango k (dove k è un numero intero minore
o al più uguale al più piccolo fra n ed m) se esiste un minore di ordine k
estratto dalla matrice A, il cui determinante è diverso da zero, ed ogni minore
di ogni k + 1 estraibile da A è caratterizzato dall’avere determinante nullo.
Esempio:
Determinare il rango della matrice rettangolare A (3, 5)
A=
1
2
0
-1
4
3
1
2
0
1
-2
1
-2
-1
3
Prendiamo tutte le matrici quadrate 3X3 che si possono estrapolare
eliminando due colonne in tutti i modi possibili:
(I, II, III), (I, II, IV), (I, II, V), (I, III, IV), (I, III, V), (I, IV, V), (II, III, IV), (II, III,
V), (II, IV, V), (III, IV, V).
Ce n’è una con determinante diverso da zero?
Osserviamo che tutte le matrici 3X3 che estrapoleremo avranno determinante
nullo perché l’ultima riga è ottenuta dalla differenza delle altre due. Il rango
quindi non può essere tre.
Consideriamo allora tutte le matrici quadrate 2X2.
Se ce n’è una con determinante diverso da zero, allora la matrice ha rango 2.
Se invece sono tutte con determinante uguale a zero, estrapoliamo le matrici
quadrate di ordine 1 e la matrice avrà rango 1, poiché il rango di una matrice
rettangolare è l’ordine massimo delle matrici quadrate non singolari che si
possono estrarre dalla matrice.
22
1
3
In questo esempio, poiché il minore
2
1
= 1 – 6 = -5 ≠ 0
la matrice A ha rango 2.
Teorema di Kronecher
Per snellire i calcoli necessari alla determinazione del rango di una matrice
rettangolare possiamo utilizzare il teorema di Kronecher. A tal fine dobbiamo
premettere la definizione di orlato.
Consideriamo la matrice A (3,5):
A=
1
2
3
-1
0
2
1
-1
4
1
1
-1
-4
5
1
Per vedere se il rango è 3, invece di considerare tutti i minori di ordine 3
estraibili da A, e verificare che almeno uno di essi sia diverso da zero,
prendiamo un minore di ordine inferiore di un’unità, ossia 2, che sia diverso
da zero, per esempio:
1
2
2
1
= 1 – 4 = -3 ≠ 0
e lo “orliamo”, formando un minore di ordine 3, con ciascuna delle rimanenti
righe e colonne, ottenendo così gli orlati.
1
2
1
2
1
-1
3
-1
-4
;
1
2
1
2
1
-1
-1
4
5
;
1
2
1
2
1
-1
0
1
1
;
Se tutti gli orlati sono nulli, possiamo affermare che il rango non è 3, sarà
quindi 2.
23
Quindi il teorema di Kronecher afferma che:
considerata una matrice rettangolare A (n, m), se esiste un minore di ordine k
estratto da A e non nullo e se tutti gli “orlati” ottenuti orlando tale minore con
ciascuna delle rimanenti righe e colonne sono nulli, allora possiamo
affermare che la matrice A (n, m) ha rango k.
Sistemi lineari
Studieremo ora i sistemi di n equazioni lineari in m incognite, dove n ed m
sono numeri arbitrari. Tali sistemi si dicono lineari poiché le incognite
compaiono solo “linearmente”, ossia non moltiplicate tra loro e con esponente
massimo 1.
Consideriamo a titolo di esempio il seguente sistema lineare di: 3 equazioni in
3 incognite
3x + 2y + z = 1
x – y + 3z = 1
2x + y = 3
Ci poniamo il seguente problema: il sistema ammette soluzioni? Esiste cioè
una terna di numeri reali (x, y, z), che sostituita nelle precedenti equazioni mi
fornisca delle identità?
E in generale, assegnato un sistema di n equazioni in m incognite, esistono
m numeri che sostituiti nelle n equazioni mi forniscano delle identità?
Cominceremo con il determinare se esiste una soluzione del sistema
precedente esponendo contemporaneamente la teoria generale.
A tale scopo denotiamo con As la matrice dei coefficienti, cioè la matrice i
cui elementi sono dati dai coefficienti delle incognite, e con Ac la matrice
completa, ottenuta aggiungendo alla matrice dei coefficienti la colonna dei
termini noti.
24
Nel caso dell’esempio risulta:
As =
3
1
2
2
-1
1
1
3
0
Ac =
1
0
1
2
-1
2
3
4
0
1
1
3
In generale, per un sistema arbitrario, si prova il seguente teorema di
Rouchè-Capelli, che rappresenta una condizione necessaria e sufficiente
affinché il sistema ammetta soluzioni (ossia sia compatibile).
Teorema di Rouchè – Capelli
Un sistema di n equazioni in m incognite è compatibile se e solo se le due
matrici As e Ac hanno lo stesso rango.
Sistema compatibile ⇔ r (As) = r (Ac)
Scelto allora un minore non nullo di ordine k = r (As) = r (Ac), detto minore
fondamentale, riscriviamo il sistema nelle k equazioni a k-incognite che
compaiono nel minore fondamentale, portando al secondo membro le
rimanenti m-k incognite. Tale sistema si risolve con la seguente regola di
Cramer.
Una soluzione di un sistema (detto di Cramer) di k equazioni in k incognite a
determinante della matrice dei coefficienti diverso da zero è data da una k-pla
di numeri reali (x1*, …, xk*), dove ciascuna xi* è data da una frazione che ha
al denominatore il determinante della matrice dei coefficienti e al numeratore
il determinante della matrice ottenuta dalla matrice dei coefficienti sostituendo
alla colonna dei coefficienti di xi* la colonna dei termini noti.
Illustreremo con degli esempi il teorema di Rouchè-Capelli.
Torniamo ora all’esempio precedentemente considerato, per verificare la
compatibilità troviamo i ranghi.
Essendo det As = 2 (6 + 1) – 1 (9 – 1)
=2∙7–1∙8
25
=6≠0
risulta
r (As) = 3
È inutile a questo punto verificare la compatibilità del sistema, in quanto la
matrice completa Ac non può che avere rango 3 come As, essendo una
matrice (3, 4).
r (As) = r (Ac)
Quindi possiamo immediatamente affermare che il sistema è compatibile. Un
tale sistema (con un numero di equazioni uguale al numero delle incognite ed
a determinante della matrice As non nullo) dicesi Sistema di Cramer.
La soluzione di tale sistema è data dalla terna (x*, y*, z*), dove:
1
1
3
2
-1
1
1
3
0
=
x* =
19
6
6
3
1
2
1
1
3
1
3
0
=-
y* =
10
3
6
3
1
2
2
-1
1
1
1
3
=-
z* =
11
6
6
sono date dal rapporto di due determinanti, al denominatore compare il
determinante di As, e al numeratore il determinante della matrice ottenuta da
26
As sostituendo alla colonna dei coefficienti dell’incognita cercata la colonna
dei termini noti.
Infatti per determinare x*, abbiamo sostituito nel determinante al numeratore
la colonna dei coefficienti di x* con quella dei termini noti, analogamente per
le altre incognite.
Consideriamo ora un sistema a tre equazioni e quattro incognite
2x + y –z – t = 1
x–y+z=2
x + 2y – 2z – t = -1
Consideriamo le matrici As e Ac e determiniamone i ranghi per verificare la
compatibilità del sistema.
As =
2
1
1
1
-1
2
-1
1
-2
-1
0
-1
Ac =
2
1
1
1
-1
2
-1
1
-2
-1
0
-1
1
2
-1
Si vede facilmente che l’ultima riga di As è la differenza delle altre due, quindi
il r(As)≠3. Vediamo se r(As)=2.
Poiché il minore
-1
1
-1
0
=1
È diverso da 0, il r(As)=2.
La matrice Ac ha analogamente rango 2 (anche per essa l’ultima riga è la
differenza delle altre due), e il minore estratto da As è anche un minore di Ac,
quindi il sistema è compatibile.
27
Osserviamo esplicitamente che risulta inutile in questo esempio trovare gli
“orlati” per la determinazione del rango, essendo l’ultima riga di entrambe le
matrici ottenibile come differenza delle altre due.
Riscriviamo, seguendo il teorema di Rouchè-Capelli, il sistema nelle
equazioni e nelle incognite che compaiono nel minore fondamentale
-z – t = 1 – 2x – y
z=2–x+y
considerando parametri tutte le rimanenti incognite, e risolvendolo poi con la
regola di Cramer. Tale sistema avrà evidentemente ∞2 soluzioni, dove 2 è
dato dalla differenza fra il numero delle incognite e il rango.
La soluzione di tale sistema è data da:
1 - 2x - y
-1
2–x+y
0
= 2–x+y
z=
1
-1
1 - 2x - y
1
2–x+y
= (-2 + x – y – 1 + 2x + y) = 3x - 3
t=
1
La soluzione del sistema di partenza di 3 equazioni in 4 incognite è quindi
data da:
(x, y, 2 – x + y, 3x – 3)
qualunque siano i numeri reali x ed y.
Ad esempio, per x = 1, y = 1, si ha la soluzione (1, 1, 2, 0)
per x = 0, y = 0, si ha la soluzione (0, 0, 2, -3), ecc.
Verifichiamo, a titolo di esempio, che sostituendo nella prima equazione di
tale sistema la soluzione trovata otteniamo un’identità.
2x + y – (2 – x + y) – (3x – 3) = 1
28
2x + y – 2 + x – y – 3x + 3 = 1
0∙x+0∙y+1=1
Analogamente, sostituendo la soluzione nelle altre due equazioni, si
ottengono ulteriori identità.
Esempio:
Risolvere il sistema:
2x − y + 5z = 1
x + y − 3z = 3
3x − 3y + 13z = −1
Essendo
As =
2
1
3
-1
1
-3
5
-3
13
=0
dobbiamo verificare la compatibilità del sistema applicando il Teorema di
Rouchè-Capelli.
Determiniamo: r(AS) e r(AC).
Essendo
Ac =
2
1
3
-1
1
-3
Scelto il minore
5
-3
13
1
3
-1
2−1
estratto da AC, diverso da zero, calcoliamo tutti i suoi
1 1
orlati.
Essendo
2
1
3
-1
1
-3
5
-3
13
=0
2
1
3
-1
1
-3
1
3
-1
=0
29
Possiamo affermare che r(AC) = 2. (Se non avessimo calcolato gli orlati
avremmo dovuto considerare i determinanti dei quattro minori del terzo ordine
estraibili da AC).
Quindi il sistema è compatibile e lo risolviamo riscrivendolo nelle equazioni e
nelle incognite che compaiono nel minore fondamentale.
2x − y = 1 − 5z
x + y = 3 + 3z
Risolvendo tale sistema con la regola di Cramer, troviamo le ∞3−2 soluzioni
x=
4−2z
3
,
qualunque sia il valore di z.
y=
5+11z
3
,
z=z
30
Sistemi omogenei
Si dice omogeneo un sistema (lineare) i cui termini noti sono tutti nulli.
Esempio:
2x + y – z = 0
x–y+z=0
x + 2y – 3z = 0
Osserviamo che dal teorema di Rouchè-Capelli segue immediatamente che il
sistema è certamente compatibile perché la colonna dei termini noti è formata
da tutti zero.
Un sistema omogeneo è quindi certamente compatibile, nel senso che
ammette sempre almeno la soluzione banale (tutte le incognite nulle).
Consideriamo la matrice:
As =
2
1
1
2
detAs = 3
1
1
-1
2
1
0
2
1
1
-3
-1
0
-3
= 3 ∙ (-3 +2) = 3 ∙ (-1) = -3 ≠ 0
quindi il sistema, risolvibile con la regola di Cramer, ammette solo la
soluzione nulla, infatti
0
0
0
1
-1
2
x=
-1
-1
-3
=0
-3
31
Analogamente y e z sono nulli.
Quindi un sistema omogeneo, la cui matrice dei coefficienti abbia rango
massimo, ammette sempre almeno la soluzione “banale”, in cui tutte le
incognite sono uguali a zero.
Si pone a questo punto il seguente problema:
un sistema omogeneo può ammettere soluzioni non banali?
Si verifica che un sistema omogeneo ammette in generale ∞n−m soluzioni,
dove n è il numero delle incognite e m il rango della matrice dei coefficienti.
Vediamolo con un esempio.
Consideriamo a titolo di esempio il seguente sistema:
2x + y – z = 0
x–y+z=0
x + 2y – 2z = 0
In questo caso il determinante di AS è nullo,
2
detAs = 1
1
infatti
1
-1
2
2
1
-1
1
-2
1
-1
=0
r(As) = 2
è un minore estraibile da As e diverso da zero.
Riscriviamo secondo il teorema di Rouchè-Capelli il sistema nelle equazioni e
nelle incognite che compaiono in tale minore
2x + y = z
x–y=z
32
e le risolviamo con la regola di Cramer
z
1
-z
-1
x=
=
-3
2
z
1
-z
y=
=
-3
-z + z
=0
-3
-2 + z
=z
-3
Le soluzioni del sistema assegnato sono date da
∞3−2
banale.
=
∞1
(0, 0, z), sono quindi
, tra cui evidentemente, per z = 0, ritroviamo la soluzione
33
Equazioni di secondo grado
Consideriamo un’equazione di secondo grado completa:
ax2 + bx + c = 0
con a, b, c numeri reali, nell’incognita x.
Vediamo come determinare le radici, ossia quei valori dell’incognita che
sostituiti nell’equazione mi diano un’identità.
Consideriamo il polinomio di secondo grado completo
P(x) = ax2 + bx + c
Nell’ipotesi che il discriminante ∆ = b2 − 4ac sia positivo, tale polinomio può
essere scritto nella forma seguente
P (x) = a (x – x1)(x – x2)
dove
x1 = −
b+ ∆
2a
e
x2 = −
b− ∆
2a
Dunque è evidente che in tal caso l’equazione ammetta due radici distinte
x = x1 e x = x2 che sono le radici cercate dell’equazione P(x) = 0, ossia
P(x) = 0
x = x1 oppure x = x2
Esercizio: Determinare le radici dell’equazione
x2 + 3x + 2 = 0.
Dalla formula precedente si ricava che:
x12 =
−3± 9−8
x1 = -1
2
=
−3±1
2
x2 = -2
34
sono due radici distinte, se le sostituisco nell’equazione ottengo un’identità,
ossia un’uguaglianza sempre soddisfatta.
4–6+2=0
è un’ identità.
0=0
Il polinomio può essere posto nella forma:
x2 + 3x + 2 = 1 ∙ (x – (-1)) (x – (-2)) = (x + 1) (x + 2)
Nel caso in cui ∆ = 0, dalla scomposizione precedentemente scritta per
P(x), si vede facilmente che risulta
P(x) = a x − x1 2
in quanto in tal caso le due radici sono uguali.
Dunque l’equazione ammette due radici coincidenti x1 = x2, ossia
P(x) = 0
x = x1 = x2
Esercizio:
x2 + 2x + 1 = 0
x12 =
−2± 4−4
2
=-
2
2
= -1,
sono due radici reali coincidenti. Infatti
x2 + 2x + 1 = 1 ∙ (x – (-1)) ∙ (x – (-1)) = 1 ∙ (x + 1) (x + 1) = (x + 1)2
Nel caso in cui
dall’espressione di
dell’equazione P(x)
radice quadrata di
scomporre.
il discriminante ∆ è un numero minore di zero,
x1 e x2 si vede facilmente che non esistono radici
= 0 (almeno nell’insieme dei numeri reali non esiste la
un numero negativo), dunque il polinomio non si può
35
Esercizio:
x2 + x + 1 = 0
x12 =
−1± 1−4
2
=
−1± −3
2
La radice di un numero negativo nell’insieme dei numeri reali non esiste. Non
si possono trovare soluzioni, o meglio non esistono soluzioni reali ma soltanto
nell’insieme dei numeri complessi.
36
Disequazioni razionali, intere, fratte
Ci proponiamo di risolvere l’equazione razionale del tipo
P (x) ≥ 0
dove P x = ax 2 + bx + c
nell’incognita x ∈ ℝ.
è un polinomio completo
di grado
due,
Risolvere una disequazione del tipo precedente significa determinare i valori
della variabile x per cui il polinomio al primo membro risulta maggiore o
uguale a zero.
Osserviamo esplicitamente che le soluzioni di un’equazione di secondo grado
sono, come abbiamo già visto, dei numeri reali, le soluzioni di una
disequazione sono invece, come vedremo, degli intervalli.
A tale scopo premettiamo le
Definizioni di intervallo aperto, chiuso, limitato, illimitato superiormente
o inferiormente
Siano a, b ∈ ℝ, definiamo:
1. Intervallo aperto illimitato superiormente di estremo inferiore a, l’insieme
x ∈ ℝ|x >𝑎
che denotiamo con il simbolo 𝑎, → oppure 𝑎, +∞ .
2. Intervallo chiuso illimitato superiormente di estremo inferiore a, l’insieme
x ∈ ℝ|x ≥a
che denotiamo con il simbolo 𝑎, → .
3. Intervallo aperto di estremo inferiore a ed estremo superiore b, l’insieme
x ∈ ℝ|a <𝑥 <𝑏
che denotiamo con il simbolo 𝑎, 𝑏 .
4. Intervallo (chiuso a sinistra e aperto a destra) di estremo inferiore a ed
estremo superiore b, l’insieme
37
x ∈ ℝ|a ≤x <𝑏
che denotiamo con il simbolo 𝑎, 𝑏 .
5. Intervallo (chiuso a destra e aperto a sinistra) di estremo inferiore a ed
estremo superiore b, l’insieme
x ∈ ℝ|a <𝑥 ≤𝑏
che denotiamo con il simbolo 𝑎, 𝑏 .
6. Intervallo chiuso di estremo inferiore a ed estremo superiore b, l’insieme
x ∈ ℝ|a ≤x ≤b
che denotiamo con il simbolo 𝑎, 𝑏 .
Se denotiamo con 𝑎 un insieme il cui unico elemento è il numero a, con
𝑎, 𝑏 analogamente l’insieme i cui unici elementi sono a e b, dalle precedenti
definizioni si verifica immediatamente che
𝑎, → =
𝑎, 𝑏 =
𝑎, 𝑏 =
𝑎, 𝑏 =
𝑎, → ∪ 𝑎
𝑎, 𝑏 ∪ 𝑎
𝑎, 𝑏 ∪ 𝑏
𝑎, 𝑏 ∪ 𝑎, 𝑏
dove in generale, come vedremo in seguito, l’insieme unione di due insiemi A
e B è l’insieme A ∪ B i cui elementi appartengono ad A o a B.
Possiamo a questo punto risolvere il problema della determinazione dei valori
della variabile x ∈ ℝ per cui è soddisfatta la disequazione:
P (x) ≥ 0.
A questo scopo consideriamo dapprima l’equazione associata:
P (x) = 0
e ne determiniamo, se esistono, le radici.
38
I Caso: 𝚫 > 0
Ci poniamo nel caso in cui il discriminante di tale equazione sia positivo, per
cui esistono due radici reali e distinte che denotiamo con x1 e x2.
In tal caso abbiamo
P x = a x − x1 x − x2
quindi:
P x ≥ 0 ⟺ a x − x1 x − x2 ≥ 0
Se a > 0 , la disequazione precedente è equivalente alla seguente:
x − x1 x − x2 ≥ 0
poiché il prodotto di due binomi è non negativo se essi sono concordi, deve
risultare
x − x1 ≥ 0
x − x1 ≤ 0
oppure
x − x2 ≥ 0
x − x2 ≤ 0
Dobbiamo quindi determinare le soluzioni di questi due sistemi di
disequazioni e poi considerarne l’unione.
Il primo sistema è soddisfatto se
x ≥ x1
x ≥ x2
Supposto x1 < x2 , rappresentiamo tali insiemi sulla retta reale, tracciando
una linea continua per denotare gli intervalli in cui le disequazioni sono
soddisfatte, ed una linea tratteggiata in caso contrario.
x1
x2
Si vede immediatamente che entrambe le disequazioni sono soddisfatte solo
se x > x2 , quindi la soluzione del primo sistema, che è data dall’intersezione
degli insiemi che rappresentano le soluzioni delle due disequazioni, è
l’intervallo
x2 , →
39
Analogamente si verifica che la soluzione del secondo sistema è
rappresentata dall’intervallo
←, x1
La soluzione della disequazione di partenza, P x > 0, nel caso a > 0, è
quindi l’unione dei due intervalli precedentemente determinati, cioè
←, x1 ∪ x2 , → .
Abbiamo quindi concluso che:
nel caso in cui il discriminante del polinomio è positivo, il polinomio ed il
coefficiente di x2 sono entrambi positivi se e solo se la variabile x è esterna
all’intervallo delle radici.
Poiché, come vedremo con qualche esempio, il ragionamento è
perfettamente analogo nel caso in cui a e il polinomio sono entrambi negativi,
possiamo affermare che:
se il discriminante del polinomio è positivo, il polinomio e il coefficiente di x2
sono concordi per valori della variabile esterni all’intervallo delle radici (di
conseguenza saranno discordi per valori della variabile x interni all’intervallo
delle radici).
Esempio: Studiare il segno del polinomio
2x 2 + 3x − 5
Poiché Δ = 9 + 40 = 49 > 0
L’equazione
2x 2 + 3x − 5 = 0
ammetterà quindi due radici reali e distinte
5
𝑥21 =
−3 ± 49
4
=
−3 ±7
4
=
−2
1
Possiamo scomporre il polinomio nella maniera seguente
5
P x =2 x+
x−1
2
40
Avremo quindi 2x 2 + 3x − 5 > 0 ⟺ x >
5
2
∨ x <1
5
di conseguenza 2x 2 + 3x − 5 < 0 ⟺ 1 < 𝑥 <
2
I Caso: 𝚫 = 𝟎
In tal caso il polinomio ammette due radici reali coincidenti, x1 = x, quindi
possiamo scrivere
P x = a x − x1 2
è evidente quindi che il polinomio ha sempre lo stesso segno del coefficiente
di x2 e sarà nullo solo per i valori della variabile x coincidenti con la radice
doppia.
Esempio: studiare il segno del polinomio
4x 2 + 12x + 9
Poiché Δ = 144 − 144 = 0
x1 = x2 = −
3
2
,
il polinomio si scompone nella maniera seguente:
3 2
4x + 12x + 9 = 4 x +
2
3
Esso sarà positivo, per tutti i valori di x diversi da − (per cui vale zero), in
2
2
2
simboli scriviamo: 4x + 12x + 9 < 0
∀𝑥 ∈ ∅
4x 2 + 12x + 9 ≥ 0
∀x ∈ ℝ
4x 2 + 12x + 9 > 0
∀x ∈ ℝ ∖ −
3
2
Esempio: studiare il segno del polinomio
9x 2 + 24x + 16 ≤ 0
Poiché Δ = 576 − 4 ∙ 16 ∙ 9 = 0
x1 = x2 = −
4
3
quindi il polinomio si scompone nel modo seguente:
4
9x 2 + 24x + 16 = 9 x +
3
2
41
Quindi risulta: 9x 2 + 24x + 16 > 0
2
9x + 24x + 16 < 0
∀x ∈ ℝ ∖ −
4
3
∀x ∈ ∅
9x 2 + 24x + 16 = 0 ⟺ x = −
4
3
III Caso: 𝚫 < 𝟎
In tal caso il polinomio non ammette radici reali, in quanto nell’insieme dei
numeri non esiste la radice quadrata di un numero negativo.
Si può dimostrare che il polinomio ammette due radici nell’insieme dei numeri
complessi (ma non ci occuperemo di tale argomento), e che esso ha sempre
lo stesso segno del coefficiente di x2.
Esempio: studiare il segno del polinomio
x2 + x + 1
Poiché Δ = 1 − 4 < 0
tale polinomio non ammette radici reali, dunque esso avrà sempre lo stesso
segno del coefficiente di x2, quindi:
x2 + x + 1 > 0
x2 + x + 1 ≤ 0
∀𝑥 ∈ ℝ
∀x ∈ ∅
42
ESERCIZI
Risolvere le seguenti disequazioni:
1.
2.
3.
4.
5.
6.
7.
8.
−x 2 − x − 1 ≥ 0
−2x 2 − 9x − 7 ≥ 0
9x 2 + 6x + 1 < 0
2x 2 + 5x + 2 ≥ 0
x 2 − 2x + 1 ≤ 0
x2 − 1 ≤ 0
x 2 + 7x + 12 > 0
x2 − 4 ≥ 0
43
Passiamo ora a considerare le disequazioni razionali fratte, cioè del tipo:
P x
Q x
≥0
P x
Q x
≤0
dove P (x) e Q (x) sono polinomi completi di grado 2 nella variabile x.
Per risolvere tali disequazioni dobbiamo procedere nella maniera seguente:
1. Determinare le soluzioni delle disequazioni P x ≥ 0
Q x >0
(non possiamo considerare l’uguaglianza a zero per il polinomio Q (x) in
quanto si trova al denominatore della frazione, e sappiamo che un
denominatore non può mai essere uguale a zero).
2. Consideriamo, sulla retta reale, gli intervalli delle soluzioni di ciascuna
di esse, esempio supponiamo: P x ≥ 0 ⟺ x ≤ x ∗ ∨ x > x ∗∗∗
Q x > 0 ⟺ x > x ∗∗
(segnando con una linea continua gli intervalli in cui sono verificate le
disequazioni precedenti)
Con x ∗ < x ∗∗ < x ∗∗∗ :
x∗
x ∗∗
x ∗∗∗
P (x) ≥ 0
Q (x) > 0
È evidente dal grafico che
1. se x < x ∗ i due polinomi hanno segno diverso, quindi:
P (x)
Q (x)
<0
P x ≥ 0, Q x < 0
2. se x ∗ < x < x ∗∗ i due polinomi sono entrambi negativi, quindi il loro
rapporto risulta positivo:
P (x)
Q (x)
>0
44
3. se x ∗∗ < x < x ∗∗∗ i due polinomi hanno segno opposto
P x < 0, Q x > 0 quindi il loro rapporto è negativo:
P (x)
Q (x)
<0
4. se x > x ∗∗∗ i due polinomi sono entrambi positivi, quindi il loro rapporto è
positivo:
P (x)
Q (x)
>0
Esempio: studiare il segno del seguente rapporto di polinomi:
2x 2 − x − 1
x 2 + 2x − 3
SVOLGIMENTO
Consideriamo, separatamente, le due disequazioni
2x 2 − x − 1 ≥ 0
x 2 + 2x − 3 > 0
Poiché risulta:
2x 2 − x − 1 = 0 ⟺ x21 =
1
1 ± 1+8
4
=
1 ±3
4
=
−
1
2
1
x 2 + 2x − 3 = 0 ⟺ x21 =
−2 ± 4+12
2
=
−2 ±4
2
=
-3
Avremo
2x 2 − x − 1 ≥ 0 ⟺ x ≥ 1 ∨ x ≤ −
2
1
2
x + 2x − 3 > 0 ⟺ x > 1 ∨ 𝑥 < −3
Rappresentando tali intervalli sulla retta reale abbiamo:
1
−
-3
2
2x 2 − x − 1 ≥ 0
x 2 + 2x − 3
1
45
È dunque evidente che:
2x 2 − x − 1
>0
x 2 + 2x − 3
x < −3 : 2x 2 − x − 1 ≥ 0
x 2 + 2x − 3 > 0
1
−3 < 𝑥 < − : 2x 2 − x − 1 > 0
2
−
1
2
2x 2 − x − 1
<0
x 2 + 2x − 3
x 2 + 2x − 3 < 0
2x 2 − x − 1 < 0
<𝑥 < 1:
2x 2 − x − 1
>0
x 2 + 2x − 3
x 2 + 2x − 3 < 0
x > 1 : 2x 2 − x − 1 > 0
x 2 + 2x − 3 > 0
2x 2 − x − 1
>0
x 2 + 2x − 3
Vediamo ora degli esempi di risoluzione di sistemi di disequazioni:
2x 2 − x − 1 < 0
x 2 + 2x + 3 > 0
Dai calcoli già fatti per l’esempio precedente abbiamo che:
2x 2 − x − 1 > 0 ⟺ x < −
1
2
∨ x >1
x 2 + 2x + 3 > 0 ⟺ x > 1 ∨ 𝑥 < −3
Rappresentando tali intervalli sulla retta reale:
-3
−
1
2
1
46
Quindi le disuguaglianze richieste non sono soddisfatte mai.
Il sistema:
2x 2 − x − 1 > 0
x 2 + 2x + 3 < 0
ammette soluzioni nell’intervallo: −3, −
1
.
2
Il sistema:
2x 2 − x − 1 > 0
x 2 + 2x + 3 > 0
ammette soluzioni nell’insieme:
←, −3
∪
Il sistema:
2x 2 − x − 1 < 0
x 2 + 2x + 3 < 0
1
ammette soluzioni nell’intervallo: − , 1 . .
2
1, → .
47
Elementi di geometria analitica
Equazione della retta: consideriamo in un piano un sistema di assi cartesiani
ortogonali e tracciamo la retta r congiungente due punti A (xA; yA) e B (xB; yB),
che denoteremo con r [A, B].
y
B (xB, yB)
P (x, y)
A (xA, yA)
O
x
Supponiamo dapprima che tale retta non sia parallela a nessuno degli assi
coordinati. Considerato un qualsiasi altro punto P del piano, dette (x, y) le sue
coordinate, ci poniamo il seguente problema:
Quale “equazione” deve essere soddisfatta da (x, y), affinché il punto P (x, y)
sia un punto della retta r [A, B]?
Si verifica facilmente, usando il teorema di Talete, che risulta:
P (x; y) ∈ [A, B]
x – xA
xB – xA
y – yA
=
6
yB – yA
48
Abbiamo così ottenuto l’ equazione di una retta sotto forma di rapporti uguali.
Cioè tutte e soltanto le coordinate dei punti della retta [A, B] soddisfano tale
equazione.
La retta è infatti un primo esempio di “luogo geometrico”, cioè di un insieme
cui appartengono tutti e soltanto i punti che godono di una assegnata
proprietà; in questo caso la proprietà è espressa dalla circostanza che essi
soddisfano l’equazione sotto forma di rapporti uguali.
Dall’equazione precedente, moltiplicando ambo i membri per (yB – yA),
otteniamo
y – yA =
yB – yA
xB – xA
yB – yA
m=
∙ (x – xA) , dove
, è detto coefficiente angolare della retta r [A, B].
xB – xA
Possiamo quindi ottenere tale retta nella forma y – yA = m (x – xA), dove m è il
coefficiente angolare.
Questa equazione, che si definisce equazione della retta in forma esplicita e
fornisce, al variare del coefficiente angolare, tutte le rette passanti per A.
Dall’equazione della retta sotto forma di rapporti uguali, eliminando i
denominatori, otteniamo:
y (xB – xA) – yA (xB – xA) = x (yB – yA) – xA (yB – yA)
da cui:
x (yB – yA) + y (xB – xA) – yA (xB – xA) + xA (yB – yA) = 0
Se poniamo a = yB – yA, b = xB – xA, c = yA (xB – xA) + xA (yB – yA) l’equazione
si scrive nella forma
ax + bx + c = 0
49
che rappresenta l’equazione cartesiana della retta dove, a e b non possono
essere entrambi nulli.
Esempio:
Considerati tre punti
R (1, 2)
S (0, 3)
T (0, 4)
Verificare se siano allineati.
SVOLGIMENTO
Determiniamo l’equazione della retta s [R, S], e verifichiamo se le coordinate
di T soddisfano tale equazione.
L’equazione della retta s sotto forma di rapporti uguali è data da:
x – xR
y – yR
=
xS – xR
yS – yR
Cioè, nel nostro caso
x–1
y–2
=
0-1
x–1
, da cui
3-2
-1
y–2
=
6
1
y – 2 = -x + 1
y = -x + 3
Equazione della retta [R, S]
x
T
S
R
O
y
50
Le coordinate del punto T soddisfano tale equazione?
y = -x + 3
sostituendo otteniamo
4 = -0 + 3
4 = +3, quindi il punto T non appartiene alla retta [R, S].
Avremmo potuto determinare l’equazione della retta s considerando
dapprima l’equazione della retta generica passante per R:
y – 2 = m (x – 1)
che fornisce, al variare di m, tutte le rette passanti per R, e poi determinare la
retta [R, S] calcolando il coefficiente angolare m =
3−2
0−1
= -1, ottenendo così
y – 2 = - (x - 1) che coincide con la retta già determinata.
Osserviamo che, poiché al variare di m l’equazione y – 2 = m (x – 1) fornisce
tutte le rette che passano per il punto R, si dice anche che essa rappresenta
l’equazione del fascio di rette di centro R.
Esercizio:
Determinare l’equazione di una retta passante per A (1, 3) e B (2, 3).
Primo metodo: scriviamo l’equazione della retta sotto forma di rapporti
uguali.
x – xA
y – yA
=
xB – xA
yB – yA
Nel caso considerato si ha:
x–1
y-3
x–1
=
2-1
y-3
=
3- 3
1
0
51
Abbiamo ottenuto una frazione il cui denominatore è zero. Come vedremo in
seguito tale scrittura non ha senso, quindi l’equazione della retta sotto forma
di rapporti uguali va bene in tutti i casi in cui la retta cercata non è parallela a
nessuno degli assi coordinati.
Possiamo anche utilizzare tale metodo nel caso generale, in cui un
denominatore di una delle due frazioni sia nullo, convenendo che, se un
denominatore è nullo, l’equazione della retta cercata è quella che si ottiene
uguagliando a zero il numeratore della frazione il cui denominatore è zero.
Nel caso dell’esempio considerato l’equazione della retta cercata è quella
ottenuta uguagliando a zero y – 3, cioè y – 3 = 0.
y–3=0
y=3
y
A
B
x
Secondo metodo: scriviamo l’equazione del fascio proprio di rette avente
centro in A (1, 3)
y – 3 = m (x – 1)
e, tra le infinite rette del fascio determiniamo quella congiungente [A, B]
calcolandone il coefficiente angolare
m=
3−3
2−1
=0
quindi la retta richiesta ha equazione:
y=3
52
Terzo metodo: consideriamo l’equazione cartesiana della retta
ax + bx + c = 0
dove a, b, c sono numeri reali da determinare imponendo che le coordinate
dei punti assegnati soddisfano l’equazione della retta.
Così facendo otteniamo:
a∙1 + b∙3 + c = 0
a∙2 + b∙3 + c = 0
da cui
a + 3b + c = 0
2a + 3b + c = 0
Il sistema ottenuto è formato da 2 equazioni nelle tre incognite (a, b, c).
Risolviamolo con il metodo studiato.
1
As = 2
3
3
1
1
1
Ac = 2
3
3
1
1
0
0
det (AS) = 3 – 6 = -3, quindi r (AS) = 2, è inutile verificare la compatibilità,
poichè il r(AC) non può che essere 2, riscriviamo quindi il sistema nella forma:
a + 3b = -c
2a + 3b = -c
E determiniamo la soluzione con il metodo di Cramer.
53
Otteniamo:
-c
3b
-c
3b
a=
=
-3c + 3c
-3
-3
1a
-c
2a
-c
b=
=
-c + 2c
-3
-3
Soluzioni: (0, -
c
3
=0
=-
1
3
c
, c), qualunque sia il numero c.
Sostituendo nell’equazione ax + by + c = 0 otteniamo
0 ∙ x + (-
c
3
c
3
)y + c = 0, cioè
y+c=0
Questa equazione può essere riscritta nella forma:
1
c ∙ (- y + 1) = 0
3
dove c non può essere nullo, perché, se così fosse, avremmo
a = 0, b = 0, c = 0
e ciò non è possibile. Possiamo quindi dividere per c ≠ 0 e ottenere
l’equazione richiesta che è data da:
1
−3y + 1 = 0
y=3
54
Osserviamo che dall’equazione cartesiana della retta
ax + by + c = 0
se b ≠ 0, otteniamo
y=−
a
x−
b
c
b
Confrontando quest’ultima equazione con quella della retta in forma esplicita
si vede immediatamente che il coefficiente angolare
m=−
a
b
55
Rette parallele
Due rette r ed s in un piano O x y si dicono parallele se esse sono coincidenti
oppure non hanno alcun punto in comune.
Utilizzando la teoria dei sistemi di equazioni lineari determiniamo la relazione
che deve intercorrere fra i coefficienti angolari di due rette parallele.
Siano r ed r' due rette, di equazioni rispettivamente:
r: ax + by + c = 0
r ' : a' x + b ' y + c ' = 0
Per determinare le loro “eventuali” intersezioni dobbiamo considerare le
soluzioni del sistema
ax + by + c = 0
a′ x + b ′ y + c ′ = 0
se compatibile, lo riscriviamo nella forma:
ax + by = −c
a′ x + b ′ y = − c ′
Essendo
a
As = a′
b
, possono presentarsi i seguenti casi: I. r(AS) = r(AC) = 2
b
II. r(AS) = 1 r(AC) = 2
III. r(AS) = r(AC) = 1
Li studieremo separatamente.
′
I Caso:
Il sistema è di Cramer (il determinante della matrice AS è diverso da zero e il
numero delle equazioni è uguale al numero delle incognite).
Esso ammette quindi una ed una sola soluzione data da
x=
-c
b
a
-c
-c
b′
a′
-c
′
′
(ab – ba )
y=
(ab′ – ba′ )
56
Osserviamo esplicitamente che
′
a
′
ab – ba ≠ 0
b
-
a′
a
≠0
b′
a′
≠
b b′
m ≠ m′
Quindi il sistema è di Cramer se e soltanto se i coefficienti angolari delle due
rette sono distinti.
Le due rette si intersecano in un solo punto le cui coordinate sono date
dall’unica soluzione del sistema di Cramer.
Nel II e nel III caso evidentemente il sistema non è di Cramer, poiché il
determinante della matrice dei coefficienti è uguale a zero
m = m′
det AS = 0
ax + by + c = 0
a′ x + b ′ y + c ′ = 0
Dobbiamo quindi considerare
a
As = a′
b
b′
a
AC = a′
b
-c
b′
-c ′
ed essendo r(AS) = 1
distinguiamo i casi r(AC) = 1 e r(AC) = 2.
Se r(AC) = 2
Se r(AC) = 1
il sistema non è compatibile
il sistema è compatibile
57
Sistema non compatibile:
a
a’
se r(AC) = 2
-c
-c’
≠0
perché non è verificata la condizione di compatibilità del teorema di RouchèCapelli. Quindi le due rette non hanno alcun punto in comune e sono delle
rette distinte.
Si tratta di rette parallele non coincidenti.
a
a’
Se r(AC) = 1
-c
-c’
= 0,
si tratta di rette coincidenti, infatti la matrice AC avrà in tal caso la seconda
riga del tipo: a′ = ka
b′ = kb
c ′ = kc ,
questo vuol dire che le due righe sono uguali o proporzionali quindi si tratta di
rette coincidenti e abbiamo soluzioni infinite.
Volendo ricavare ciò dal teorema di Rouchè–Capelli, riscriviamo il sistema
nell’incognita e nell’equazione che compaiono nel minore fondamentale, per
esempio:
ax = -by – c
Tale equazione ammette le soluzioni
–
by −c
a
,y
che sono le coordinate di
tutti i punti di una retta, che coincidono con i punti dell’altra retta.
58
Esercizio:
Primo modo di risoluzione:
2x + 4y − 3 = 0
−2x − 4y + 1 = 0
4y = −2x + 3
−4y = 2x − 1
Scriviamo le equazioni delle due rette in forma esplicita:
1
x+
2
1
y=− x+
2
y= −
3
4
1
4
Poiché esse hanno lo stesso coefficiente angolare
1
1
m=m′ = 2
2
e i termini noti diversi, sono rette parallele e distinte, quindi non avranno
alcun punto in comune.
Secondo modo di risoluzione:
2
AS = -2
4
-4
2
AC = -2
4
-4
det (AS) = 0
-3
1
r (AS) = 1
r (AC) = 2
r(AS) ≠ r(AC), quindi
le rette sono parallele e distinte.
59
Rette perpendicolari
Due rette r,s contenute in un piano si dicono perpendicolari se intersecandosi
formano 4 angoli uguali.
Si verifica facilmente che se una retta r ha equazione
r: ax + by + c = 0,
la retta s perpendicolare ad r avrà equazione
s ┴ r : bx – ay + k = 0,
cioè i coefficienti di x e y sono cambiati di posto e uno è cambiato di segno.
Esercizio:
Determinare l’equazione della retta s perpendicolare alla retta r, con:
r : x + 2y + 5 = 0
L’equazione della retta generica s perpendicolare alla retta r è del tipo:
s : 2x – y + k = 0,
dove k è un valore arbitrario perché di rette perpendicolari ad r ce ne sono
infinite. Se imponiamo alla retta s di passare per il punto A (1, 0):
A∈s
2∙1–0+k=0
k = -2
otteniamo
2x – y – 2 = 0
In termini di coefficiente angolare, la relazione che deve intercorrere fra i
coefficienti angolari m ed m′ di due rette perpendicolari è data da
m′ = −
-
1
m
è l’antireciproco di m.
1
m
60
Quindi se r: y = mx + q
s: y = −
1
m
x+q
Esercizio:
r: y = 4x + 1
1
s ┴ r: y = - x + k
4
k è arbitrario ma può essere trovato assegnando un punto.
Se l’origine O (0, 0) appartiene alla retta S:
0=-
1
4
∙0+k
k=0
y=-
1
4
x
y
x
61
Circonferenza
Si definisce circonferenza di centro un punto C e raggio R, l’insieme dei punti
del piano la cui distanza da C è uguale a R.
Un punto P (x, y) apparterrà dunque alla circonferenza di centro C (xC, yC) e
raggio R se e solo se d(P, C) = R.
y
C (xC, yC)
R
P (x, y)
O
x
Dove con il simbolo d(P, C) si denota la distanza di P da C. Poiché risulta
d (P, C) =
x − xC
2
+ y − yC
2
i punti della circonferenza avranno coordinate (x, y) soddisfacenti l’equazione
d (P, C) =
x − xC
2
+ y − yC
da cui
R2 = (x – xC) 2 + (y – yC)2
R2 = x2 – 2xxC + xC2 + y2 – 2yyC + yC2
R2 = x2 + y2 + (-2xC) x + (-2yC) y + (xC2 + yC2 – R2)
2
=R
62
Se poniamo: -2xC = a
e
-2yC = b
e
xC2 + yC2 – R2 = c
l’ equazione della circonferenza diventa: x2 + y2 + ax + by + c = 0
Un punto appartiene ad una circonferenza di centro C e raggio R se e solo se
le sue coordinate soddisfano questa equazione.
È evidente che le coordinate del centro sono date da
C (xC, yC)
con xC = -
a
2
,
yC = -
b
2
quindi deve essere
a 2
−2
b 2
+ −2
− R2 = c
da cui
a 2 + b 2 − 4ac
4
=R
2
R=
a 2 + b 2 − 4c
4
quindi un’equazione del tipo x2 + y2 + ax + by + c = 0 rappresenta l’equazione
di una circonferenza, se risulta a2 + b2 – 4c > 0, altrimenti il raggio non può
essere un numero reale.
63
Esercizio:
Verificare se la seguente equazione è l’equazione di una circonferenza:
x2 + y2 + 2x + y + 7 = 0.
Troviamo il centro della circonferenza:
C = (xc ; yc),
xc = -
a
2
=-
2
2
=1
yc = -
b
2
=-
1
2
Verifichiamo che il raggio non è un numero reale, poichè risulta
R=
a 2 + b 2 − 4c
4
=
2+1−28
4
=
−
23
4
Quindi non si tratta dell’equazione di una circonferenza.
Possiamo concludere che un polinomio di secondo grado P(x, y) in due
variabili x ed y, può rappresentare l’equazione di una circonferenza se sono
soddisfatte le seguenti tre condizioni:
1. I coefficienti x2 e y2 sono uguali tra loro
2. Manca il termine rettangolare (cioè il termine contenente il prodotto xy)
3. a2 + b2 – 4c > 0
64
Posizioni reciproche retta-circonferenza nel piano
Considerato un riferimento cartesiano O x y vediamo, nel piano xy, le
posizioni reciproche retta – circonferenza.
s
t
r
È evidente che una retta può essere esterna, tangente o secante ad una
circonferenza, a seconda che essa non abbia punti in comune (r), due punti
in comune coincidenti (t), o due punti in comune distinti (s).
Tutto ciò si traduce nel fatto che il sistema:
x 2 + y 2 + ax + by + c = 0
y = mx + q
è incompatibile, ammette due soluzioni coincidenti, ammette due soluzioni
distinte.
Osserviamo che si tratta di un sistema di secondo grado (il grado di un
sistema è dato dal prodotto dei gradi delle equazioni che lo costituiscono);
essendo di secondo grado l’equazione della circonferenza e di primo grado
quella della retta, il grado del sistema sarà 2 ∙ 1 = 2, quindi esso ammetterà o
due soluzioni reali coincidenti (retta tangente), o due soluzioni reali distinte
(retta secante) o nessuna soluzione reale (dovremmo dire nessuna soluzione
reale ma due soluzioni complesse) (retta esterna).
Vediamo i vari casi possibili con degli esempi.
65
Esercizio:
Determinare l’equazione delle rette r, s, t tangenti alla circonferenza di
equazione:
x2 + y2 + 3x + y + 2 = 0
3
2
passanti per i punti A (1, 2), B (-1, 0), D (− , 0), rispettivamente.
SVOLGIMENTO
Cominciamo con l’individuare il centro e il raggio della circonferenza
3
2
C (− , −
1
)
2
r=
2
2
e le sue intersezioni con gli assi cartesiani
x 2 + y 2 + 3x + y + 2 = 0
y=0
y=0
x 2 + 3x + 2 = 0
Le soluzioni di tale sistema sono date dai punti (-1, 0), (-2, 0).
A (1, 2)
y
-2
-1
x
0
tg 2
-1
tg: y = -x - 1
tg 1
66
Osserviamo che, in generale
I: da un punto esterno ad una circonferenza è possibile condurre due
tangenti.
P
II: Da un punto P appartenente ad una circonferenza è possibile condurre
una sola tangente che sarà la retta per P perpendicolare al raggio.
t
P
III: Da un punto interno ad una circonferenza non è possibile condurre alcuna
tangente.
X
X
P
X
X
67
Svolgiamo la prima parte dell’esercizio, ossia:
I) Determinare l’equazione della retta r, tangente alla circonferenza e
passante per A (1, 2).
Prima di iniziare a risolvere l’esercizio verifichiamo se A è interno, esterno o
appartenente alla circonferenza, sapremo così quante tangenti è possibile
condurre dal punto A alla circonferenza.
A (1, 2) appartiene alla circonferenza?
Sostituiamo le sue coordinate nell’equazione della circonferenza
12 + 22 + 3 ∙ 1 + 2 + 2 = 0
otteniamo
12 = 0
A è quindi un punto interno o esterno alla circonferenza.
Se AC < r
A sarà un punto interno
Se AC > r
A sarà un punto esterno
Troviamo la distanza di A dal centro.
AC =
=
25
2
(>
1+
5
2
3 2
2
+ 2+
1 2
2
=
25
4
+
25
4
=
50
4
=
)
quindi A è un punto esterno, in quanto la sua distanza dal centro è maggiore
del raggio.
Dal punto A potremo condurre quindi due tangenti alla circonferenza.
68
Vediamo come.
Consideriamo la retta generica passante per A (1, 2).
y – 2 = m (x - 1)
se tale retta deve essere tangente alla circonferenza, il sistema
y−2=m x−1
x 2 + y 2 + 3x + y + 2 = 0
dovrà ammettere due soluzioni coincidenti, che saranno le coordinate del
solo punto di intersezione.
Otteniamo così:
y = mx − m + 2
x 2 + mx − m + 2
2
+ 3x + mx − m + 2 + 2 = 0
y = mx − m + 2
x 2 + m2 x 2 + m2 + 4 − 2m2 x + 4 mx − 4m + 3x + mx − m + 2 + 2 = 0
y = mx − m + 2
x 2 1 + m2 + x −2m2 + 4m + 3 + m + m2 + 4 − 4m − m + 4 = 0
y = mx − m + 2
x 2 1 + m2 + x −2m2 + 5m + 3 + m2 − 5m + 8 = 0
Imponiamo che il discriminante dell’equazione di secondo grado in x sia
uguale a zero
∆=0
−2m2 + 5m + 3
2
- 4 (1 + m2) (m2 + 5m + 8) = 0
4m4 + 25m2 + 9 − 20m3 − 12m2 + 30m − 4 m2 − 5m + 8 + m4 − 5m3 + 8m2 = 0
(25 – 12 – 36) m2 + (30 + 20) m + 9 – 32 = 0
-23m2 + 50m – 23 = 0
m12
=
m1 =
−50 ± 50 2 − 23 2 ∙4
−2 ∙23
−50 − 384
−46
=
−50 ± 384
−46
m2 =
−50 + 384
−46
69
Sostituendo i valori di m1 e m2 all’equazione della retta generica passante per
A, otteniamo le due tangenti alla circonferenza.
y – 2 = m (x – 1)
tg1 : y – 2 =
25+ 96
23
(x − 1)
tg2 : y – 2 =
−25+ 96
23
(x − 1)
II) Determinare l’equazione della retta s tangente alla circonferenza e
passante per B (-1, 0).
Vediamo se B appartiene alla circonferenza. Sostituendo le sue coordinate
nell’equazione della circonferenza otteniamo:
-12 + 0 + 3 ∙ (-1) + 0 + 2 = 0
1–3+2=0
Si tratta di un’identità, quindi B è un punto della circonferenza,
da esso potremo condurre una sola tangente.
0=0
Svolgiamo l’esercizio in due maniere distinte.
Primo metodo di risoluzione:
Consideriamo la retta generica per B (-1, 0), e, come fatto nel caso
precedente, imponiamo che essa sia tangente alla circonferenza. Il sistema
y = m x+1
x 2 + y 2 + 3x + y + 2 = 0
dovrà ammettere
dell’equazione
due
soluzioni
coincidenti,
x 2 1 + m2 + x 2m2 + m + 3 + m2 + m + 2 = 0
∆=0
2m2 + m + 3
2
ossia
il
discriminante
deve essere nullo.
− 4 1 + m2 m2 + m + 2 = 0
4m4 + m2 + 9 + 4m3 + 12m2 + 6m − 4m2 − 4m − 8 − 4m4 − 4m3 − 8m2 = 0
m2 + 2m + 1 = 0
m+1
2
=0
m = -1
70
Abbiamo solo un valore, quindi una sola tangente.
Secondo metodo di risoluzione:
Il coefficiente della tangente deve essere l’antireciproco del coefficiente della
retta congiungente BC, poiché la tangente è la retta per B perpendicolare al
raggio.
3
1
2
Se B (-1, 0) e C (- , - )
2
allora il coefficiente angolare della retta congiungente BC è dato da
m=
Quindi l’antireciproco m′ = −
1
2
−1+
3 =
2
1
2
∙2=1
1
m
m′ = -1
la tangente avrà quindi equazione
y – 0 = -1 (x + 1)
dovendo coincidere con la retta per B di coefficiente angolare -1.
71
III) Determinare l’equazione della retta t tangente alla circonferenza e
3
passante per D (− , 0).
2
Come nei casi precedenti, verifichiamo se D appartiene o meno alla
circonferenza.
−
9
4
−
3 2
2
9
2
+ 02 + 3 ∙
3
2
+0+2=0
+ 2=0
1
− = 0, quindi D non è un punto della circonferenza poiché
4
DC =
3
3 2
2
2
− +
+ 0+
è minore del raggio r =
1 2
2
=
1
2
2
2
Il punto D è un punto interno e quindi non è possibile condurre alcuna
tangente.
Se proviamo a risolvere il sistema come nei casi precedenti, possiamo
verificare che non esiste alcuna soluzione.
72
Esercizio:
Condurre le tangenti alla circonferenza passanti per il punto (2, 0).
C: x2 + y2 – 2x – 3 = 0
Equazione della retta generica passante per il punto (2, 0): y = m (x – 2).
y = m x−2
x 2 + y 2 − 2x − 3 = 0
x 2 + m2 x − 2
2
− 2x − 3 = 0
x 2 ∙ 1 + m2 − 4m2 x + 4m2 − 2x − 3 = 0
x 2 1 + m2 − 2x 1 + 2m2 + 4m2 − 3 = 0
Tale polinomio deve avere due radici coincidenti, deve essere dunque nullo il
suo discriminante.
∆= 0
4 1 + 2m2
2
− 4 4m2 − 3
1 + m2 = 0
1 + 4m4 + 4m2 − 4m2 − 4m4 + 3 + 3m2 = 0
3m2 + 4 = 0
m2 = -
4
3
Non esiste alcuna tangente, infatti si verifica che il punto è interno alla
circonferenza poiché la sua distanza dal centro è minore del raggio.
Verifica:
C (1, 0)
r=
AC =
A (2, 0)
4+12
4
=
2−1
4
2
2
=2
=1
AC < r
Quindi AC è un punto interno.
73
Ellisse
È un luogo geometrico costituito dall’insieme dei punti P(x, y) che godono
della seguente proprietà: la somma delle distanze da due punti fissi detti
fuochi è costante.
Detti F1 ed F2 i due fuochi, e denotato con 2a il valore della costante,
abbiamo:
P è un punto dell’ellisse
PF1 + PF2 = 2a
y
T
P (x, y)
b
R
F2 (-c, 0)
O
a
c
F1 (c, 0)
S
x
Q
Poiché anche R ed S sono punti dell’ellisse, si comprende facilmente che il
valore della costante 2a è proprio la lunghezza del segmento RS, dove:
RS sarà un asse dell’ellisse (asse maggiore)
TQ sarà un altro asse dell’ellisse (asse minore)
TO sarà un semiasse (= OQ )
RO sarà un semiasse (= OS )
Ricaviamo ora l’equazione dell’ellisse in un sistema di riferimento in cui i
fuochi siano simmetrici rispetto all’asse y.
Poiché gli assi di tale sistema di riferimento saranno, come vedremo, assi di
simmetria dell’ellisse, l’equazione ricavata è detta equazione canonica
dell’ellisse.
74
P (x, y) apparterrà all’ellisse quando la somma (PF1 + PF2) = 2a.
PF1 =
Poiché
x−c
2
+ y2
PF2 =
x+c
2
+ y2
abbiamo:
2
x−c
PF1 + PF2 = 2a
+ y2 +
x+c
2
+ y 2 = 2a
Da cui:
2
x−c
+ y2 = -
x+c
2
+ y 2 + 2°
elevando ambo i membri al quadrato otterremo
2
x−c
x−c
2
+ y2
2
= −
+ y2 = x + c
2
x+c
2
+ y 2 + 2a
+ y 2 + 4a2 − 4a
x 2 + c 2 − 2xc = x 2 + c 2 + 2xc + 4a2 − 4a
4xc + 4a2 = 4a
x+c
2
2
x+c
2
x+c
+ y2
2
+ y2
+ y2
Elevando nuovamente al quadrato:
xc + a2
2
= a
x+c
2
+ y2
x 2 c 2 + a4 + 2xca2 = a x + c
2
2
+ y2
x 2 c 2 + 2xca2 + a4 = a2 x 2 + a2 c 2 + 2a2 xc + y 2 a2
x 2 a2 − c 2 + y 2 a2 = a2 a2 c 2
Se poniamo
a2 − c 2 = b2 > 0
x2 a2− c2 + y2a2
b2
2
x +
y2a2
b2
= a2
l’equazione precedente diventa:
=
a2 a2c2
b2
dividendo per a2
Otteniamo l’ equazione canonica dell’ellisse:
𝐱𝟐
𝐲𝟐
𝐚
𝐛𝟐
𝟐 +
=𝟏
75
Si vede facilmente che gli assi cartesiani sono assi di simmetria dell’ellisse
(ogni punto dell’ellisse avrà il simmetrico rispetto agli assi x e y appartenente
ancora all’ellisse).
Osservazione:
Se a e b sono uguali otterremo una circonferenza di centro O e raggio a e i
punti F1 ed F2 diventeranno il centro della circonferenza.
x 2 + y 2 = a2
y
a
O
F1
F2
Esercizio:
Trovare le tangenti all’ellisse
I) A (2, 0)
x2
4
+
y2
9
= 1 passanti per i punti
II) B (0, 3)
III) E (1, 1)
SVOLGIMENTO
I) Determinare l’equazione della tangente per A (2, 0).
y – 0 = m (x – 2)
y = m (x − 2)
x2
4
x2
4
+
+
y2
9
=1
m 2 x−2 2
9
=1
x
76
9x 2 + 4m2 x − 2
2
= 36
x 2 9 + 4m2 − 16m2 x + 16m2 − 36 = 0
Imponiamo che il discriminante sia uguale a zero
162 m4 − 4 9 + 4m2
16m2 − 36 = 0
16m4 − 36m2 + 81 − 16m4 + 36m2 = 0
81 = 0, assurdo. Perché?
y
B
y=3
A
x
x=2
Il risultato ottenuto ci dice che non è lecito procedere in questo modo, perché
abbiamo utilizzato l’equazione in forma esplicita della rette generica passante
per A, ma questo non è sempre possibile, (l’equazione in forma esplicita si
ottiene da quella cartesiana per b ≠ 0, se b = 0 non si può proprio scrivere)
vuol dire che la retta richiesta è l’unica che non potremo mai avere
dall’equazione y = m (x – 2), (per nessun valore di m), e cioè x – 2 = 0.
Osserviamo che A (2, 0) appartiene all’ellisse, esso coincide con il punto
d’intersezione dell’ellisse con il semiasse positivo delle x e la tangente è la
retta x = 2.
77
II) Determinare l’equazione della tangente per B (0, 3).
Come nel caso precedente, essendo (0, 3) il punto d’intersezione dell’ellisse
con il semiasse positivo delle y, la tangente in tale punto è data dalla retta
y=3
infatti le soluzioni del sistema
y − 3 = mx
x2
4
+
y2
9
=1
sono le radici di
x2
4
+
mx +3 2
Per cui
9
=1
∆=0
x
2
1
4
+
m2
9
+
2
3
xm = 0
m=0
Quindi la tangente richiesta è la retta y – 3 = 0.
II) Determinare l’equazione della tangente per E (1, 1).
78
Parabola
Si definisce parabola il luogo dei punti del piano equidistanti da un punto fisso
detto fuoco e da una retta fissa detta direttrice.
Determiniamo, in un fissato sistema di riferimento cartesiano, l’equazione di
una parabola avente come fuoco il punto F (xF, yF) e direttrice la retta d di
equazione y = d.
Un punto P (x, y) apparterrà alla suddetta parabola se e solo se
PF = d(P, d)
dove con il simbolo d(P, d) abbiamo denotato la distanza di P dalla direttrice.
y
P (x, y)
F (xF, yF)
V
O
x
R
Q (x, d)
y=d
asse
Risulta:
PF =
x − xF
2
+ y − yF
2
e d(P, d) = PQ
dove Q è il punto d’intersezione della direttrice con la perpendicolare
condotta per P, e PQ =
x − x 2 + y − d 2 = y − d , dove con il
simbolo y − d indichiamo il valore assoluto del numero y – d, che
coinciderà con y – d, se quest’ultimo è positivo, con –(y – d) se y – d è
negativo, cioè:
y–d
se y – d ≥ 0
-(y - d)
se y – d < 0
y−d =
79
Quindi P (x, y) appartiene alla parabola di fuoco F e direttrice d e se solo se
x − xF
2
+ y − yF
2
= y−d
elevando al quadrato ambo i membri otteniamo:
x − xF
2
+ y − yF
2
= y−d
2
da cui:
2
x2 + x2F − 2xxF + y2 + y2F − 2yyF = y2 + d − 2yd
x 2 + x −2xF + xF2 + yF2 − d2 = 2y yF − d
Posto
a=
1
xF
b= −
2 yF − d
c=
yF − d
x 2F + y 2F − d 2
2 yF − d
l’equazione della parabola diventa:
y = ax2 + bx + c
Osserviamo
che, se l’equazione della parabola è scritta nella forma
precedente, l’ascissa del fuoco xF = −
b
2a
, l’ordinata del fuoco si ottiene dalle
relazioni precedenti, essendo
2a =
2c =
1
yF − d
yF − d =
1
2a
b 2
−2a + y 2F − d 2
yF − d
Risulta
2c =
b2
4a
2
2
2a
2 + yF − d
2c =
b2
4a 2
+
yF + d
2a
2a
4ac = b2 + 2yFa + 2da
80
4ac = b2 + 2yFa + 2a yF −
2
4ayF = 4ac − b + 1
∆
1
2a
1
yF = − 4a − 4a
Quindi il fuoco F (−
b
2a
,−
∆
4a
+
1
4a
) e la direttrice è la retta di equazione
y=−
∆
4a
−
1
4a
Dicesi asse della parabola la perpendicolare alla direttrice condotta per il
fuoco. L’intersezione della parabola con il suo asse si definisce vertice.
Dalla stessa definizione consegue che il vertice della parabola è il punto
medio del segmento avente come estremi il fuoco e il punto d’intersezione
della direttrice con l’asse.
Nel caso particolare in cui il fuoco sia un punto dell’asse y e il vertice della
parabola coincida con l’origine degli assi cartesiani, l’equazione diventa
y = ax2
che rappresenta quindi l’equazione di una parabola avente come asse l’asse
y e vertice l’origine.
Scambiando il ruolo delle coordinate, sostituendo cioè all’ascissa l’ordinata e
viceversa si ottiene l’equazione di una parabola della tangente
x = ay 2 + by + c , con asse parallelo all’asse x e direttrice parallela all’asse y.
81
Iperbole
Si definisce iperbole il luogo dei punti del piano per cui la differenza delle
distanze da due punti fissi detti fuochi è costante (denoteremo con 2a tale
costante).
Ricaviamo l’equazione dell’iperbole in un sistema di riferimento cartesiano in
cui i fuochi siano due punti appartenenti all’asse delle ascisse, simmetrici
rispetto all’asse y.
b
b
y=- x
y= x
y
a
a
b
F2 (-c, 0)
F1 (c, 0)
-a -b
a
x
PF1 − PF2 = 2a.
Un punto P (x, y) apparterrà all’ellisse
Poiché PF1 =
x−c
2
+ y 2 ; PF2 =
PF1 − PF2 = 2a
x+c
2
+ y2 ,
x−c
2
+ y2 -
x−c
2
+ y 2 = 2a +
x+c
2
+ y 2 = 2a
x+c
2
+ y2
Elevando al quadrato ambo i membri otteniamo:
x−c
2
+ y 2 = 4a2 + x + c
2
+ y 2 + 4a
x+c
2
x 2 + c 2 − 2xc = 4a2 + x 2 + c 2 + 2xc + 4a
4xc + 4a2 = −4a
x+c
2
+ y2
x 2 c 2 + a4 + 2a2 xc = a2 x + c
2
+ y2
+ y2
x+c
2
+ y2
82
x 2 c 2 + a4 + 2a2 xc = a2 x 2 + a2 c 2 + 2a2 xc + a2 y 2
x 2 c 2 − a2 − a2 y 2 = a2 c 2 − a2
Dividendo per c 2 − a2 ∙ a2 :
x2
y2
−
=1
a2 c 2 − a2
Osserviamo che, poiché 2a = PF1 − PF2 , la differenza di due lati del triangolo
PF1F2 è minore del lato F1F2, quindi 2a < 2c, da cui a<c.
Consegue che c 2 − a2 > 0, posto c 2 − a2 = b2 . L’equazione dell’iperbole
diventa:
x2 y2
−
=1
a2 b 2
b
Consideriamo le rette di equazione: y = ± x, se le intersechiamo con
a
l’iperbole:
b
y= ± x
a
2
2
x
y
−
=1
a2 b 2
otteniamo:
x2 x2
−
=1↔0=1
a2 a2
assurdo, quindi tali rette non intersecano l’iperbole, esse rappresentano,
come vedremo in seguito, gli asintoti dell’iperbole.
Osserviamo che dall’equazione ottenuta si ricava che l’iperbole passa per i
punti (a, 0) (-a, 0).
Nel caso in cui a = b gli asintoti dell’iperbole diventano le bisettrici del primo e
terzo quadrante.