Teoria della probabilità
Esercizio 1. Si normalizzi la densità di probabilità = , per ∈ −∞, ∞ .
Si deve costruire una densità = , t.c. = 1
= = = 2 − 3 ⟹ = 2
1 = 2 =
2
3 "
Integrale Gaussiano
/
3 "
=
2
/#
= 2"$
1
Teoria della probabilità
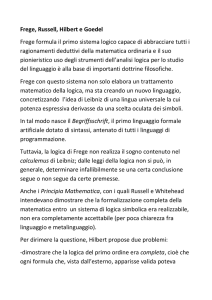
Esercizio 2. Le altezze, in centimetri, della popolazione di un certo paese sono distribuite
secondo una densità Gaussiana con media % = 168 () e varianza $ = 36 () .
ℎ =
1
+, #
1
+-. /
=
2"$
6 2"
Si calcoli la probabilità di trovare una persona di altezza compresa tra ℎ = 180 () e
ℎ = 190 ().
0.14
p(h) / cm-1
0.12
0.1
0.08
2 180 () ≤ ℎ ≤ 190 ()
0.06
0.04
0.02
0
130 135 140 145 150 155 160 165 170 175 180 185 190 195 200 205 210
h / cm
2
Teoria della probabilità
+
+
+4
2 ℎ ≤ ℎ ≤ ℎ = ℎ ℎ = ℎ ℎ − ℎ ℎ
+4
5=
ℎ−%
2$
⟶ 5 =
8
ℎ
2$
,
7
⟶ ℎ
8
<
(7,)/ #
= 2$ (8,)/ #
ℎ ℎ = 2$ ,
+, #
,
(8,)/ #
5 9
5 9
3
Teoria della probabilità
Gradshteyn, Ryzhik in “Table of integrals, series, and products”
dmlf.nist.gov
NIST digital library of mathematical functions
Euclideus
APP Android per matematica (tra cui integrazione numerica)
4
Teoria della probabilità
0.14
p(h) / cm-1
0.12
0.1
0.08
0.06
ℎ − 0.12 0.06 − 0.12
=
ℎ − 168
161 − 168
2 168, 0.12
ℎ − 0.12 0.06 − 0.12
=
ℎ − 168
175 − 168
2 175, 0.06
2 161, 0.06
0.04
0.02
0
130 135 140 145 150 155 160 165 170 175 180 185 190 195 200 205 210
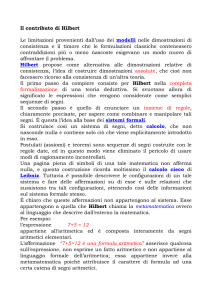
Ampiezza a metà altezza: @4AB C
h / cm
= 1/2 → ℎ = 168 ± 72 ln 2 ≈ 168 ± 7
1
ℎ − 154
196
I ℎ ≈
1
−
ℎ − 182
196
0
154 ≤ ℎ ≤ 168
168 ≤ ℎ ≤ 182
altrove
Ri-normalizzata!
5
Teoria della probabilità
1
ℎ − 154
196
I ℎ ≈
1
−
ℎ − 182
196
0
154 ≤ ℎ ≤ 168
168 ≤ ℎ ≤ 182
altrove
<
2 180 ≤ ℎ ≤ 190 = .<
.
ℎ ℎ ≈ .<
ℎ I ℎ
.
1
2 180 ≤ ℎ ≤ 190 ≈ −
ℎ ℎ − 182 =
196 .<
.
1 1 ℎ − 182ℎ Q
=−
196 2
.<
=−
=
1
182 91 − 182 − 180 90 − 182
196
≈ 1 ⋅ 10
6
Teoria della probabilità
Esercizio 3. In un campione statistico di particelle, vincolate a muoversi lungo una sola
direzione S, di un gas monoatomico ideale, a T e V fissati, la densità di probabilità che una
molecola possieda un certo momento 2T è data dalla distribuzione di Maxwell
2T =
U
VW /XY Z
2T U
VW /XY Z
dove \ è l’energia cinetica di un atomo del gas.
=
1 U
[
VW /XY Z
Si calcoli il valore medio dell’energia cinetica del gas.
Energia cinetica di un atomo:
2T
=
2)
\ 2T
Costante di normalizzazione:
[=
^
2T
VW
]XYZ
= 2")_` a
7
Teoria della probabilità
b=
\
^
b=
\
b=
\
2T \ 2T 2T =
1
2")_` a
VW
1 ^
2T 2T ]XYZ =
2) 1
1
)_` a = _` a
2)
2
$ = )_` a
1
2"$ /# = $
8
Matrici – Parte 2
Aggiunta. Data una matrice c ∈ ℂe×] , la sua aggiunta, cg corrisponde alla trasposta
della complessa coniugata di c
1
c = −o
2 − 2o
cg = c∗
−2
11
7
3+o
2
8
ij
cg
cg
k,l
∗
= ml,k
1
= −2
3−o
+o
11
2
2 + 2o
7
8
9
Matrici – Parte 2
Autovettori di una matrice. Sia c ∈ ℂe×e e pl (1 ≤ q ≤ r) ∈ ℂ, il q-esimo autovettore della
matrice è quel vettore tale per cui
ctl = pl tl
ovvero, c − pl se tl = u, che corrisponde a risolvere il sistema di equazioni lineari:
m, − pl xl, + m, xl, + ⋯ + m,e xl,e = 0
m, xl, + m, − pl xl, + ⋯ + m,e xl,e = 0
⋮
me, xl, + me, xl, + ⋯ + me,e − pl xl,e = 0
pl è detto autovalore della matrice, con autovettore tl .
Autovalori di una matrice. Sia c ∈ ℂe×e , gli autovalori, pl con 1 ≤ q ≤ r, della matrice sono
quei numeri tali per cui il sistema lineare di equazioni c − pl se tl = u ha soluzione non
banale (ossia tl ≠ u). Questo è assicurato dal verificarsi della condizione:
det c − pl se = 0
10
Matrici – Parte 2
Matrici autoaggiunte. Una matrice (quadrata) si dice autoaggiunta se
c = cg
• Tutte le matrici reali simmetriche sono autoaggiunte.
∗
• Le matrici Hermitiane (c ∈ ℂe×e , mk,l = ml,k
) sono autoaggiunte.
• Autovalori di una matrice autoaggiunta: ctl = pl tl
ctl
ctl
g
g
= tlg pl∗
= tlg cg = tlg c
tlg ctl = pl∗ tlg tl = pl tlg tl ⟺ pl = pl∗ ⟺ pl ∈ ℝ
Una matrice autoaggiunta ha autovalori reali.
11
Matrici – Parte 2
•
Una matrice autoaggiunta ha autovettori ortogonali:
c} = }~ → c = }~}
}g cg = ~}g →
}g
cg = }g
~}g = }~}
}g = }
→
p
0
~=
⋮
0
~}g = c
0
p
⋮
0
}g } = } } = s
⋯ 0
⋯ 0
⋱ ⋮
⋯ pe
} = t
k,l = tgk tl =
1 o=q
0 o≠q
• Il determinante di una matrice autoaggiunta è reale
det cg = det cij
∗
= det cij
c = cg → det c = det c
∗
∗
= det c
⇔ det c ∈ ℝ
t
⋯ te
∗
12
Matrici – Parte 2
Esercizio 1. Si calcolino autovalori e autovettori della matrice Hermitiana
Autovalori
=
det − ps =
Autovettore 1 (autovalore p =
)
Normalizzazione
0
o
−p
o
−o
0
−o
= p −
= 0
−p
p = ±
−
−o
t =u
o
−
−
x, − o
x, = 0
x = −ox,
1
→ ,
→ t =
o
x, −
x, = 0
o
0=0
t
=
=
t
t
tg t
=
t
1 − o
=
1
2
t =
1/ 2
o/ 2
13
Matrici – Parte 2
Autovettore 2 (autovalore p = −
)
o
−o
t = u
x, − o
x, = 0
x = ox,
1
→ ,
→ t =
o
x, +
x, = 0
−o
0=0
Normalizzazione
=
t
=
t
t
tg t
=
t
1 − o
=
1
2
t =
1/ 2
−o/ 2
Ortogonalità autovettori
g
1 o
1/ 2
= 1/ 2 −o/ 2
= + =0
2 2
−o/ 2
14
Spazi di Hilbert
Esercizio 1. Si valuti il prodotto scalare tra le due funzioni d’onda
=
=
1
sin " + o sin 2"
1
sin 3" − sin "
con ∈ 0, , (a) per integrazione diretta, (b) previa rappresentazione delle due funzioni
d’onda sul set di base e = 2/ sin r"/ , con r ∈ ℕ∗ .
Per affrontare l’esercizio è utile risolvere prima questo integrale generale per r, ) ∈ ℕ∗ :
1
= cos
sin r" sin )"
2 <
<
1
r−) "
− cos
2 <
< cos " = < cos = ,< , quindi:
sin r" sin )"
= e,]
2
<
r+) "
Essendo r, ) ∈ ℕ∗ allora r + ) ≠ 0 sempre,
quindi il secondo addendo è sempre nullo
15
Spazi di Hilbert
(a) integrazione diretta
= = ∗ =
<
1
= sin " − o sin 2"
<
sin 3"
− sin "
=−
1
2
(b) via algebrica: rappresentazione delle funzioni d’onda sula base
La base fornita dal problema è ortonormale?
e ] = e ∗ ]
<
2
= e,]
= sin r" sin )"
<
Si può espandere una funzione d’onda Ψ() sulla base:
Ψ = (e e e
con (e = e Ψ
16
Spazi di Hilbert
Espansione di () sulla base:
e
=
1
2
=
sin r"
<
2
1
o
0
0 0 ⋯
sin "
ij
Espansione di () sulla base:
e
=
1
2
2
=
sin r"
<
−1
0 1 0
0 ⋯
+ o sin 2"
sin 3" − sin "
ij
=
=
1
2
1
2
e, + oe,
−e, + e,
Prodotto scalare:
=
g
1
1
= 1 ∗ −1 + −o ∗ 0 + 0 ∗ 1 = −
2
2
17
Spazi di Hilbert
Esercizio 2. Si rappresenti la funzione d’onda = sin 2 , con ∈ 0, 2" , come
matrice colonna sul set di base e = ke / 2", con r ∈ ℤ. Si valuti, poi, la costante
di normalizzazione (a) usando la rappresentazione matriciale, (b) per integrazione diretta.
È, innanzitutto, utile esprimere la funzione d’onda come combinazione di esponenziali
complessi:
o k
= sin 2 = − − k
2
Gli elementi della matrice colonna, che corrisponde alla rappresentazione della funzione
d’onda sulla base, sono le proiezioni
e = e∗ = −
<
o
2 2"
ke k − k
<
18
Spazi di Hilbert
È utile calcolare questo integrale generale
k
<
1
= k
<
= 0 → k = 2"
<
1
≠ 0 → cos − o sin
<
1
= sin + o cos
k =
Quindi:
<
Da cui segue: < ke k] = 2"e,]
2"
0
<
=0
=0
= 2",<
≠0
19
e = −
o
2 2"
Spazi di Hilbert
ke k − k = −o
<
"
− e,
2 e,
⋮
⋮
0
1
" 0
t = < = −o
0
2
0
−1
0
⋮
⋮
(a) Normalizzazione usando la rappresentazione matriciale
= t
tale che
g = tg t = = 1/ "
g = tg t = 1
"
⋯ 0
2
1 0 0
0 −1
⋮
0
1
0
0 ⋯ 0 = " = 1
0
−1
0
⋮
20
Spazi di Hilbert
(b) Normalizzazione per integrazione diretta
Ψ =
<
Ψ ∗
tale che
Ψ
=
Ψ =
k − k k − k =
4 <
=1
k
k
=
2 − −
=
= " = 1
4 <
2 <
= 1/ "
21
Spazi di Hilbert
Esercizio 3. Quali dei seguenti operatori sono lineari?
(a) ⋅
(b) sin ⋅
(c)
(a) ≠ (a) + ≠
(b) sin
(c)
=
+
(e) ⋅
+ ≠ sin (b) sin + (c) (d) ≠ sin ¡
=
¡
+ sin ¢ +
∗
NO
NO
SI
22
Spazi di Hilbert
(d)
(d)
= +
+ (e) ∗
¡
= + = ∗ ∗ ≠ ∗ (e) + ∗
= = + ∗
∗
+
¡
+
¢
=
+
SI
NO
23
Esercizio 4. Si dimostri che
+
Spazi di Hilbert
− = − − 1.
+
− =
+
+
− =
+
− −
− =
+
+
+
− =
− =
+
−
− =
− =
− − =
− =
− − 1 24
Spazi di Hilbert
Esercizio 5. Si dimostri che = è una autofunzione dell’operatore lineare m£ =
− 4 . Qual è l’autovalore?
=
− 4 =
m£ =
−
4
−
2
m£ = −2 − 4 + 4 − 4 =
m£ = −6 = −6 autovalore
25
Spazi di Hilbert
Esercizio 6. Si costruisca la rappresentazione dell’operatore m£ = cos , con ∈ 0, 2" ,
sulla base, e = ke / 2", con r ∈ ℤ.
Elementi di matrice
me,] = e m£ ]
me,]
1
=
k
4" <
Matrice
m=
1
1
ke
k]
=
cos =
ke k + k k] =
2" <
4" <
⋱
⋱
e^]
1
k
+
4" <
⋱
0
1/2
1/2
0
1/2
1/2
0
1/2
1/2
0
1/2
1/2
0
⋱
⋱
⋱
e]
1
= e,] + e,]^
2
26
Esercizio 6b. Si costruisca la rappresentazione dell’operatore m£ = cos , con ∈ 0, 2" ,
sulla base,
Spazi di Hilbert
cos r
1 + e,< "
e =
sin r
"
per r ≤ 0
per r > 0
con r intero, dopo aver dimostrato che quest’ultima è ortonormale.
Caso 1: r, ) ≤ 0
e ] =
e ] =
e ] =
"
4"
1
cos r cos ) =
1 + e,< 1 + ],<
1
<
1 + e,< 1 + ],<
1
1 + e,< 1 + ],<
ke + ke k] + k] =
<
e,] + e,] = e,]
27
Caso 2: r, ) > 0
e ]
e ]
e ]
Spazi di Hilbert
1
= sin r sin ) =
" <
1
= − ke − ke k] − k] =
4" <
1
=−
k(e^]) − k
4" <
e ] = − e,] − e,] = e,]
Caso 3: r ≤ 0, ) > 0
e ] =
e ] =
e ] =
1
" 1 + e,<
1
− k
e]
+ k(e^]) =
cos r sin ) =
<
4o" 1 + e,<
1
e]
4o" 1 + e,<
ke + ke k] − k] =
<
k(e^]) − k
<
e]
+ k
e]
− k(e^]) = 0
28
Spazi di Hilbert
Caso 4: r > 0, ) ≤ 0
e ] =
e ] =
e ] =
1
" 1 + ],<
1
sin r cos ) =
<
4o" 1 + ],<
1
4o" 1 + ],<
ke − ke k] + k] =
<
k(e^]) + k
<
e]
− k
e]
− k(e^]) = 0
Quindi, in tutta generalità: e ] = e,] , ossia la base è ortonormale.
29
Spazi di Hilbert
¦
Trasformata della generica funzione del set di base ]
= m£]
Per ) ≤ 0
¦
]
=
¦
]
=
¦
]
=
¦
]
=
1
1 + ],< "
1
cos cos ) =
4
1 + ],< "
2
1 + ],< "
1
2
1
1 + ]^,<
1 + ],<
k
]^
+ k
1
2
1 + ],< "
]
cos ) + 1 +
]^ +
4
1
2
+ k
]
1
1 + ],< "
1 + ],<
1 + ],<
k + k k] + k] =
+ k
]^
=
cos ) − 1 =
]
Nota 1: per ) = 0, si ha:
cos ) + 1 = cos = cos − ∝ = ]
30
Spazi di Hilbert
¦
Trasformata della generica funzione del set di base ]
= m£]
Per ) > 0
¦
]
=
¦
]
=
¦
]
=
¦
]
=
1
1
cos sin ) =
k + k k] − k] =
"
4o "
1
k
4o "
1
2 "
]^
− k
sin ) + 1 +
1
1
]^ + ]
2
2
]
1
2 "
+ k
]
− k
]^
=
sin ) − 1 =
Nota 2: per ) = 1, il secondo addendo è nullo.
31
Spazi di Hilbert
¦
Elementi di matrice me,] = e m£ ] = e ]
Caso 1: r, ) ≤ 0
¦
me,] = e ]
=
me,] =
1
2
me,] =
1
2
1 + ]^,<
1 + ],<
1 + ]^,<
1 + ],<
e,]^ +
1
+ e,]
2 e,]^
1
e,]^ + e,]
2
Caso 2: r, ) > 0
¦
me,] = e ]
=
1
2
e ]^ +
1 + ],<
1 + ],<
1
2
1 + ],<
1 + ],<
e ]
1 + ],< e,] =
Nota 1
per r, ) < 0
per r = 0 o ) = 0
1
1
1
e ]^ + e ] = e,]^ + e,]
2
2
2
Caso 3: r ≤ 0, ) > 0 e caso 4: r > 0, ) ≤ 0
¦
me,] = e ]
=0
Perché si è visto che la trasformata non mescola
funzioni del set di base con indici di segno opposto
32
Spazi di Hilbert
Matrice
⋯
c=
⋱
⋱
−2
⋱
0
1/2
−1
1/2
0
1/ 2
0
1/ 2
0
0
2
1
0
0
1/2
1/2
0
⋱
⋯
)⁄
r
⋮
−2
−1
⋱
⋱
0
1
2
⋮
33
Spazi di Hilbert
Esercizio 7. Si valuti l’effetto dell’operatore ª£« = −o
⁄ sulla funzione d’onda
normalizzata Ψ = sin 2 / " dell’esercizio 2, (a) in maniera diretta, (b)
algebricamente, previa rappresentazione dell’operatore sulla stessa base, e =
ke / 2", con r ∈ ℤ.
(a) Calcolo diretto dell’azione dell’operatore sulla funzione d’onda
Ψ ¦ = ª£« Ψ = −
o
o
sin 2 = −2
cos 2
"
"
(b) Calcolo algebrico
(b) l’operatore ª£« viene rappresentato attraverso la matrice , con elementi
ªe,] = e ª£« ]
o
k]
)
ke
= −
=−
k
2" <
2" <
e]
= −)
e,]
34
Spazi di Hilbert
−2 0 0
0 −1 0
= −
0
0 0
0
0 0
0
0 0
ªe,] = −)
e,]
Ψ ¦ = ª£« Ψ
−2
0
oℏ
¦ =
0
2 0
0
Ψ¦
= −2
¦ =
0
−1
0
0
0
oℏ
2
0
0
0
0
0
0
0
0
1
0
0
0
0
1
0
0
0
0
0
2
Non serve estendere oltre la matrice
dato che e Ψ = 0 per r ≥ 3
0 1
−2
0 0
oℏ 0
0 0 =
0
2 0
0 0
2 −1
−2
+
oℏ
= −2
cos 2
"
35
Spazi di Hilbert
Esercizio 8. Dati i due operatori m£ = / e ­® = exp −o , valutarne il commutatore
°£ = m£­® − ­® m£ = m£, ­® (a) in maniera diretta, (b) algebricamente previa rappresentazione
sulla base di esponenziali complessi e = exp −or / 2", con ∈ 0, 2" e r ∈ ℤ.
(a) calcolo diretto
°£ = m£, ­® = m£­® − ­® m£
m£­® =
k
= −o k + k
­® m£ = k
m£, ­® = −o k + k
m£, ­® = −o k
− k
= −o k
±
36
Spazi di Hilbert
(b) metodo algebrico
Rappresentazione di m£ sulla base, attraverso una matrice c i cui elementi sono:
me,]
1
o)
=
ke
k] = −
ke k] = −o)e,]
2" <
2" <
matrice diagonale
⋯
c = −o
⋱
−2
−2
−1
−1
0
0
1
1
2
2
⋯
⋱
)⁄
r
⋮
−2
−1
0
1
2
⋮
37
Spazi di Hilbert
Rappresentazione di ­® sulla base, attraverso una matrice ² i cui elementi sono:
­e,]
1
1
=
ke k k] =
k
2" <
2" <
⋯
²=
⋱
⋱
−2
⋱
0
1
−1
0
0
1
0
0
0
1
e]
2
1
0
0
1
0
0
⋱
= e,]^
⋯
⋱
⋱
)⁄
r
⋮
−2
−1
0
1
2
⋮
38
Spazi di Hilbert
m£, ­® ⟶ c² − ²c ³
c² = −o
c²
e,]
c² = −o
⋱
−2
−1
0
1
⋱
⋱
2
⋱
⋱
0
1
0
0
1
0
0
1
0
0
1
= me,X ­X,] = −o _e,X X,]^ = −ore,]^
X
⋯
⋱
⋱
−2
⋱
0
−1
−1
0
0
0
0
0
0
1
1
0
0
2
X
2
0
0
⋱
⋯
⋱
⋱
0
0
⋱
⋱
⋱
)⁄
r
⋮
−2
−1
0
1
2
⋮
39
Spazi di Hilbert
²c = −o
²c
e,]
⋱
⋱
0
0
1
0
0
1
⋱
0
0
1
0
0
⋱
−2
⋱
⋱
−1
0
1
2
⋱
= ­e,X mX,] = −o )e,X^ X,] = −o)e,]^
X
⋯
²c = −o
⋱
0
1
⋱
⋱
−2
⋱
0
−2
−1
0
0
−1
0
0
0
0
1
X
0
0
1
2
0
0
⋱
⋯
⋱
⋱
)⁄
r
⋮
−2
−1
0
1
2
⋮
40
Spazi di Hilbert
⋱
⋱
c² − ²c = −o
c² − ²c
e,]
c² − ²c = −o
⋱
0
−1
0
0
0
0
0
1
0
0
2
0
0
⋱
⋱
⋱
= −o r − ) e,]^ = −oe,]^
⋱
⋱
⋱
0
1
0
0
1
0
0
1
0
0
1
0
0
⋱
⋱
⋱
−
⋱
⋱
⋱
0
−2
0
0
−1
0
0
0
0
0
1
0
0
⋱
⋱
⋱
Corrisponde alla rappresentazione
matriciale di −o k
41
Spazi di Hilbert
Esercizio 9. Sia
c=
1/2
1/2 2
1/2 2 −1/2 2
3/4
1/4
−1/2 2
1/4
3/4
la rappresentazione di un operatore m£ in un appropriato spazio di Hilbert. Si costruiscano
gli autovettori di c?
1. Calcolo degli autovalori
1
−p
2
1
1
2 2
3
−p
det c − sp =
2 2 4
1
1
−
4
2 2
1 2−
det c − sp =
2
4
− 2
2
3−
1
−
1
2 2
1
1 2 − 4p
=
2
4
4
− 2
3
−p
4
− 2
1 =0
3−
2
3 − 4p
1
− 2
=
1
3 − 4p
= 4p
42
Spazi di Hilbert
2−
2
− 2
2−
2
3−
1
3−
2− 3−
−4
=0
− 2
1 =0
3−
−1 − 2
2 3− + 2 − 2
− 2− −4 4− =0
2 3− + 2 =0
= 0 ⟶ p = 0
, = 4 ⟶ p = p = 1
autovalori degeneri
43
Spazi di Hilbert
Autovettore per p = 0
2
2
− 2
2 − 2 x,
0
x, = 0
3
1
x,
0
1
3
2x, + 2x, − 2x, = 0
2x, + 3x, + x, = 0
− 2x, + x, + 3x, = 0
0=0
´ x, = 0
x, = x,
0
t = 1
1
Normalizzazione
=
t
tg t
/
0
= 1/ 2
1/ 2
44
Spazi di Hilbert
Autovettore per p = 1
−2
2 − 2 x,
0
x, = 0
2 −1
1
x,
0
− 2 1
−1
−2x, + 2x, − 2x, = 0
2x, − x, + x, = 0
− 2x, + x, − x, = 0
0=0
0=0
µ
x, − x, = 2x,
1
t = 2 2
2
Normalizzazione
=
t
tg t
/
1/ 11
= 2 2/ 11
2/ 11
45
Spazi di Hilbert
Autovettore per p = 1
Una volta scelto il primo dei due autovettori degeneri, il secondo si calcola imponendo
le due condizioni di ortogonalità con gli altri, e la condizione di normalizzazione.
g t = 0
g t = 0
tg t = 1
1/ 2
= −1/2
1/2
1
1
11
2
x, +
x, +
x,
2 2
11
1
2
x, = 0
x, +
+ x,
2
11
+ x,
x, = 0
=1
x, = −x,
µx, = 2x,
x, = 1/2
46