Fondamenti di Meccanica delle Strutture: a.a. 2003/2004
prof. Ginevra Salerno
Dipartimento di Strutture, Università di Roma 3
00146 via Vito Volterra, n.62, Roma
tel.num.: (39) 6 55173459
fax.num.: (39) 6 55173441
e.mail: [email protected]
1
1.1
Richiami di algebra e geometria
Lo spazio puntuale e la differenza fra punti
Abbiamo definito la Statica come quella branca della Meccanica che studia l’equilibrio dei corpi.
Per determinare le condizioni di stasi di un corpo soggetto ad azioni esterne, dovremo anche
imparare a riconoscere le condizioni che determinano il movimento dello stesso, o almeno, il
suo moto incipiente. Ma dove avviene il moto dei corpi e dove questi corpi sono fisicamente
collocati? Nello spazio fisico o ambiente, che chiameremo E, di cui i corpi occupano volumi. Lo
spazio fisico è composto di punti; il singolo punto è un’entità geometrica intuitiva di dimensione
nulla. I punti formano rette, piani, figure geometriche semplici o complesse; l’insieme di tutti i
punti costituisce lo spazio ambiente. I punti dello spazio saranno da noi indicati con una lettera
maiuscola A, B, C...
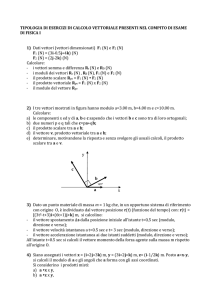
Figure 1: Il vettore come differenza fra punti
L’operazione principale che può essere effettuata con i punti è un’operazione di sottrazione.
Il risultato di questa operazione A − B è un’entità geometrica che ha una direzione (la direzione
della retta passante per i due punti), un verso (da B ad A) ed una lunghezza (quella del segmento
AB): è cioè un segmento orientato, a cui diamo il nome di vettore (da veho=porto) applicato
in B, ossia un trasportatore che porta il punto B nel punto A:
→
BA:= A − B
Da questa definizione discende in maniera naturale la possibilità di sommare ad un punto un
1
vettore per ottenere un nuovo punto, ossia:
→
B+ BA= B + (A − B) = A
Il vettore così definito gode delle seguenti proprietà:
1. A − B = −(B − A) per ogni coppia di punti A e B in E;
2. A − A = 0, vettore nullo;
3. A − C = (A − B) + (B − C) per ogni terna di punti A,B e C in E.
Figure 2: Visualizzazione della proprietà 3
1.2
Il vettore come classe di equivalenza
Abbiamo or ora definito il vettore come differenza fra punti, ossia come quell’oggetto geometrico
che trasporta un punto dello spazio ambiente in un altro punto dello stesso spazio. Introdotto
in questo modo il vettore viene naturalmente definito come un vettore applicato in B. Se
prescindiamo dal punto di applicazione possiamo fornire una definizione più generale di vettore,
detto em vettore libero, ossia come classe di equivalenza di tutti quei vettori che condividono
la stessa direzione, la stessa lunghezza e lo stesso verso indipendentemente dal loro punto di
applicazione.
Per definire il concetto di classe di equivalenza, ritorniamo alla teoria degli insiemi. Sia dato
un insieme generico (ad esempio, l’insieme composto dai numeri 2 e 4, da una palla da tennis,
da un fiore e da una costellazione - i Gemelli) e sia data una proprietà (ad esempio, la proprietà
di essere un numero intero). La proprietà fornita crea naturalmente dei sottoinsiemi dell’insieme
dato, distinguendo gli elementi dell’insieme che soddisfano la proprietà (ovvero 2 e 4) da quelli
che non la soddisfano (la palla da tennis, il fiore e la costellazione dei Gemelli). Ognuno dei due
sottoinsiemi è detto classe di equivalenza. Ogni classe di equivalenza è composta da elementi
che si equivalgono dal punto di vista della proprietà selezionata e quindi se ne può scegliere uno
che sia rappresentativo di tutti gli elementi della classe.
Se si prescinde dal punto di applicazione, l’insieme di tutti i vettori che si possono pensare
applicati nei punti dello spazio geometrico possono essere suddivisi in classi di equivalenza.
Appartengono alla stessa classe di equivalenza vettori aventi la stessa direzione, lo stesso verso
e la stessa lunghezza, indipendentemente da quale sia il loro punto di applicazione.
2
1.3
Coordinate dei punti e lo spazio R3
Cominciamo a parlare di rappresentazione di un vettore. Per parlare di rappresentazione di un
vettore per componenti dobbiamo fare un passo indietro e ritornare ai punti dello spazio. Finora
i punti sono stati rappresentati da una lettera maiuscola dell’alfabeto romano; volendo invece
cominciare a fare calcoli algebrici, dobbiamo rappresentare i punti con dei numeri. Il veicolo di
una tale rappresentazione è la scelta di un sistema di coordinate nello spazio ambiente. Il sistema
di coordinate che presentiamo è un sistema di coordinate cartesiane ortogonali. In un sistema
siffatto ad ogni punto dello spazio ambiente viene fatta corrispondere una terna ordinata di
numeri reali, così determinata: nello spazio ambiente viene scelto un punto privilegiato O, detto
origine, a partire dal quale saranno disegnati tre assi ortogonali; per ognuno di essi sarà indicato
il semiasse positivo e su ciascuno sarà definita un’unità di misura. I tre assi (x, y, z) saranno detti
assi coordinati, che definiscono a loro volta tre piani (xy, xz, yz), detti piani coordinati. Tramite
proiezioni ortogonali, si determineranno i tre punti (Px , Py , Pz ) proiezione del generico punto
P sui tre assi coordinati; le lunghezze dei tre segmenti (OPx , OPy , OPz ) misurata nell’unità
di misura prescelta e presa positivamente o negativamente a seconda che il verso del segmento
sia concorde o discorde al verso positivo dell’asse coordinato corrispondente, sono le coordinate
cartesiane ortogonali di P .
I punti dello spazio ambiente sono quindi rappresentati da terne ordinate di numeri reali,
individuate come detto sopra. Fra punti e triple ordinate esiste una corrispondenza biunivoca nel
senso che ad una tripla corrisponde uno ed un solo punto e viceversa. In particolare, all’origine
degli assi corrisponde la tripla nulla (0, 0, 0). Ci chiediamo ora quali operazioni possano essere
effettuate con le triple.
Figure 3: Coordinate cartesiani ortogonali di un punto in 3D
Le triple possono essere sommate. La somma di due triple è ancora una tripla che ha come
ascissa la somma delle ascisse delle due triple, come ordinata la somma delle due ordinate e
come quota la somma delle due quote:
(x1 , y1 , z1 ) + (x2 , y2 , z2 ) := (x1 + x2 , y1 + y2 , z1 + z2 )
Si può inoltre effettuare il prodotto di una tripla per uno scalare (da non confondere con il
prodotto scalare). Dato uno scalare α, il prodotto di α per la generica tripla è ancora una tripla
che ha come ascissa l’ascissa precedente moltiplicata per α, come ordinata l’ordinata precedente
3
moltiplicata per α e così via:
α ∗ (x, y, z) := (α · x, α · y, α · z)
in cui l’operatore · è il prodotto fra numeri reali. Il simbolo ∗ sarà frequentemente omesso e
quando un vettore ed uno scalare si accosteranno senza nessun simbolo interposto, sarà supposta
l’operazione di moltiplicazione per uno scalare.
Queste due operazioni godono delle seguenti proprietà:
1. (α · β)(x, y, z) = α[β(x, y, z)] per ogni coppia di scalari α e β e per ogni terna ordinata
(x, y, z): (associativa);
2. (α + β)(x, y, z) = α(x, y, z) + β(x, y, z): (distributiva rispetto alla somma di scalari);
3. α[(x1 , y1 , z1 ) + (x2 , y2 , z2 )] = α(x1 , y1 , z1 ) + α(x2 , y2 , z2 ): (distributiva rispetto alla somma
di triple);
4. α(0, 0, 0) = (0, 0, 0), per ogni α;
5. 0(x, y, z) = (0, 0, 0), per ogni terna;
6. 1(x, y, z) = (x, y, z): elemento neutro per la moltiplicazione;
L’insieme delle terne ordinate, corredato delle due operazioni sopra descritte con tutte le
proprietà elencate costituiscono uno spazio vettoriale, che chiameremo R3 . Le medesime operazioni con tutte le corrispondenti proprietà possono essere particolarizzate al caso di R2 , ossia
delle coppie ordinate.
1.4
Il vettore posizione e le componenti di un vettore
Torniamo ai vettori. Abbiamo definito il vettore come una classe di equivalenza di segmenti orientati che condividono una lunghezza, una direzione ed un verso. Data una classe di equivalenza,
ad ogni punto dello spazio può immaginarsi applicato un elemento della classe; prendiamo come
elemento rappresentativo quello applicato nell’origine. Esso individuerà un punto P dello spazio.
Il vettore:
→
OP = P − O
sarà detto vettore posizione di P . La tripla ordinata che rappresenta le coordinate di P nel
sistema cartesiano ortogonale prescelto, individuerà univocamente anche il vettore P −O. Quindi
si potrà scrivere:
P − O ≡ (xp , yp , zp )
dove il simbolo ≡ significa ”è equivalente a”. Inoltre, ricordando le operazioni sulle triple, si
avrà:
(xp , yp , zp ) = (xp , 0, 0) + (0, yp , 0) + (0, 0, zp ) = xp (1, 0, 0) + yp (0, 1, 0) + zp (0, 0, 1)
Le tre terne (1, 0, 0),(0, 1, 0), (0, 0, 1) rappresentano tre punti speciali posti sui tre assi coordinati
a distanza unitaria dall’origine, i cui vettori posizione indicheremo rispettivamente con i ≡
(1, 0, 0),j ≡ (0, 1, 0) e k ≡ (0, 0, 1). Il vettore posizione di P sarà dunque uguale a:
P − O = xp i + yp j + zp k
Il generico vettore posizione sarà dunque rappresentato come una combinazione lineare dei tre
vettori i, j, k. Questi tre vettori formano una base dello spazio dei vettori ed (xp , yp , zp ), oltre a
rappresentare le coordinate di P nel riferimento cartesiano ortogonale, staranno a rappresentare
le componenti del vettore posizione nella suddetta base.
4
Per finire, vediamo come si calcolano le componenti sulla base data di un vettore che non sia
un vettore posizione, ma differenza di due punti qualsiasi. Ricordiamo che
B − A = (B − O) + (O − A) = (B − O) − (A − O)
e quindi il vettore (B − A) viene espresso come differenza di due vettori posizione. Poichè per
essi sono definite le componenti sulla base (che corrispondono alle coordinate di B ed A), si
determineranno di conseguenza le componenti di (B − A):
B −A = (B −O)−(A−O) = xb i+yb j+zb k−(xa i+ya j+za k) = (xb −xa )i+(yb −ya )j+(zb −za )k
A questo punto è banale dimostrare (la dimostrazione è geometrica) che due vettori appartenenti alla stessa classe di equivalenza hanno le stesse componenti sulla stessa base.
1.5
Somma e moltiplicazione per uno scalare
A questo punto poichè anche i vettori sono rappresentati da terne ordinate, e poichè le terne
ordinate si possono sommare e moltiplicare per uno scalare, allora anche i vettori si potranno
sommare e moltiplicare per uno scalare. Se a e b sono due vettori rispettivamente di componenti
(a1 , a2 , a3 ) e (b1 , b2 , b3 ):
a = a1 i + a2 j + a3 k,
b = b1 i + b2 j + b3 k
allora il vettore somma sarà:
a + b = (a1 + b1 )i + (a2 + b2 )j + (a3 + b3 )k
Analogamente, se b è il vettore di componenti (b1 , b2 , b3 ), allora αb sarà il vettore di componenti:
αb = αb1 i + αb2 j + αb3 k
Investighiamo il significato geometrico delle due operazioni vettoriali ora introdotte: si dimostra agevolmente che l’operazione di somma vettoriale corrisponde alla famosa regola del
parallelogramma che sancisce che dati due vettori, il vettore somma ha lunghezza direzione e
verso della diagonale maggiore del parallelogramma avente per lati i due vettori.
Figure 4: Significato geometrico della somma di vettori in 2D
La figura 1 mostra il caso piano, ma il discorso è agevolmente generalizzabile al caso 3D. I
vettori A − O e B − O, rispettivamente di componenti (a1 , a2 ) ed (b1 , b2 ) sulla base scelta sono
disegnati e su di essi è costruito il parallelogramma di vertici OABC. È inoltre disegnato il
5
vettore C − O costruito sulla diagonale maggiore del parallelogramma, con modulo e direzione
coincidenti e verso indicato in figura. Si intende dimostrare che le componenti di questo vettore
altri non sono che (a1 + b1 , a2 + b2 ). Si osservi la figura: per le componenti di C − O si ha:
c1 = OC = OA + A C ,
c2 = OC = OB + B C ,
Ma il segmento A C è di lunghezza pari al segmento AC che appartiene al triangolo rettangolo
ACC . Questo triangolo è a sua volta congruente al triangolo rettangolo OBB (i due triangoli
hanno un lato e tutti gli angoli uguali) e quindi AC risulta di lunghezza pari al segmento
calOB che altri non è se non b1 . In conclusione si dimostra che:
c1 = OC = OA + A C = OA + AC = OA + OB = a1 + b1
In modo assolutamente analogo si dimostra che:
c2 = OC = OB + B C = OB + BC = OB + OA = b2 + a2 = a2 + b2
Significato geometrico assume anche la seconda operazione. Si dimostra che moltiplicare
un vettore per lo scalare α significa moltiplicare la lunghezza del vettore per |α| mantenendo
inalterata la direzione e cambiando verso solo se α è negativo.
Figure 5: Significato geometrico della moltiplicazione per uno scalare in 2D
Osserviamo la figura (5), in cui è disegnato il vettore A − O di componenti (a1 , a2 ). Nella
stessa figura è disegnato il vettore A − O, che ha la stessa direzione, lo stesso verso di A −
O e lunghezza del segmento rappresentativo pari ad α volte la lunghezza del segmento che
rappresenta A − O. Si intende dimostrare che questo vettore ha componenti (αa1 , αa2 ): la
dimostrazione è basata sulla similitudine dei due triangoli OAB ed OA B , simili in quanto
aventi tutti gli angoli uguali. In tal caso si potranno impostare le seguenti proporzioni:
OB : OB = OA : OA ,
OC : OC = OA : OA
da cui si ricava:
OB OA
= α OB = αa1 ,
OA
come volevasi dimostrare.
OB =
OC =
6
OC OA
= α OC = αa2
OA
1.6
Il prodotto scalare
Il prodotto scalare di due vettori (da non confondersi con il prodotto di uno scalare per un
vettore) è un’operazione che, dati due vettori a e b, fornisce come risultato uno scalare così
definito:
a·b := a1 b1 + a2 b2 + a3 b3
ove (a1 , a2 , a3 ) e (b1 , b2 , b3 ) sono le componenti dei due vettori sulla base data. Forniamo un
esempio:
a = 3i + j − 6k,
b = −2i + k −→ a·b = 3 · (−2) + 1 · 0 + (−6) · 1 = −12
Le proprietà del prodotto scalare sono le seguenti:
P1: a·b = b·a per ogni coppia di vettori a e b (simmetria)
P2: (a + b)·c = a·c + b·c per ogni terna di vettori comunque scelta (linearità);
P3: (αa)·b = α(a·b) per ogni coppia di vettori a e b e per ogni scalare α (omogeneità);
P4: a·a ≥ 0 ed inoltre a·a = 0 ⇐⇒ a = 0 (positività)
Si dimostra per esercizio, utilizzando la definizione fornite di prodotto scalare, la proprietà
P3. Si ha (alla definizione di moltiplicazione di un vettore per uno scalare) che:
(αa)·b = (αa1 i + αa2 j + αa3 k)·(b1 i + b2 j + b3 k)
dalla definizione di prodotto scalare si ottiene di seguito:
(αa1 i + αa2 j + αa3 k)·(b1 i + b2 j + b3 k) = αa1 b1 + αa2 b2 + αa3 b3
Si può allora mettere α in evidenza ottenendo:
αa1 b1 + αa2 b2 + αa3 b3 = α(a1 b1 + a2 b2 + a3 b3 )
e riconoscere infine che quanto contenuto nella parentesi non è altro se non il prodotto scalare
di a e b. Ricordando da dove siamo partiti e ripercorrendo tutta la catena delle uguaglianze
evidenziate, per la proprietà transitiva delle uguaglianze si ha:
(αa)·b = α(a·b)
con α a e b del tutto generici.
Tramite il prodotto scalare possiamo definire una serie di grandezze geometriche finora lasciate volutamente indeterminate, come, ad esempio, la lughezza di un vettore, oppure la distanza
fra due punti dello spazio ambiente, o, ancora l’angolo formato fra due vettori ed, infine, il
concetto di proiezione ortogonale di un vettore su di un altro. Sempre utilizzando il prodotto
scalare definiremo il versore di un vettore.
*
Definiamo la lunghezza o modulo |a| del vettore a la radice quadrata del prodotto scalare del
vettore per se stesso:
√
|a| = a·a = a21 + a22 + a23
Questa quantità risulta ben definita in quanto la grandezza sotto radice quadrata è sempre non
negativa.
In particolare, il modulo del vettore B − A risulta uguale a:
|B − A| = (B − A)·(B − A) = (xB − xA )2 + (yB − yA )2 + (zB − zA )2
che coincide con la distanza euclidea fra i punti A e B. Lo spazio puntuale o ambiente, equipaggiato con questa precisa definizione della distanza fra punti, assume le caratteristiche di spazio
puntuale euclideo.
7
1.7
Versori e proiezioni ortogonali
Definiamo ora il versore di un vettore a, come quel vettore avente la stessa direzione, lo stesso
verso di a ma lunghezza unitaria. Ricordando le proprietà del prodotto di uno scalare per un
vettore (non cambia la direzione del vettore, non cambia il verso se lo scalare è maggiore di
zero e produce quale unico effetto una dilatazione oppure una contrazione della lunghezza del
vettore) il versore di a risulta così definito:
vers a :=
a1
a2
a3
1
a=
i+
j+
k
|a|
|a|
|a|
|a|
Rimane da verificare che questo vettore così definito abbia lunghezza pari ad uno. Si avrà:
a21
a22
1
|a|
a23
|vers a| =
+
=
a21 + a22 + a23 =
+
=1
2
2
2
|a|
|a | |a|
|a|
|a|
*
Oltre a valutare la lunghezza di un vettore, il prodotto scalare può essere utilizzato per valutare
l’angolo formato da due vettori.
Figure 6: Componenti di a e b in 2D
Riferendoci alla figura (6), che in questo caso particolare presenta un problema bidimensionale, e ricordando le relazioni trigonometriche che legano in un triangolo rettangolo l’ipotenusa
ai cateti, si avrà:
a1 = |a| cos θ,
a2 = |a| sin θ,
b1 = |b| cos ψ,
b2 = |b| sin ψ
da cui si otterrà:
a·b = a1 · b1 + a2 · b2 = |a| cos θ|b| cos ψ + |a| sin θ|b| sin ψ =
|a||b|(cos θ cos ψ + sin θ sin ψ) = |a||b| cos(ψ − θ) = |a||b| cos α
8
Evidenziamo la seguente relazione geometrica:
a·b = |a||b| cos α
che consente di determinare l’angolo formato dai due vettori tramite la relazione inversa:
α = arccos
a·b
|a||b|
La relazione or ora determinata ci consente di fornire la seguente definizione:due vettori sono
ortogonali se e solo se il loro prodotto scalare è zero.
Difatti poichè vale:
0 = a·b = |a||b| cos α
e poichè |a| = 0 ed |b| = 0 allora si otterrà che:
cos α = 0 → α =
π
+ kπ, k = 1, 2, ..., n
2
Banalmente ne consegue che per i vettori della base prescelta, essendo ortogonali per costruzione,
varrà:
i·j = 0,
j·k = 0,
i·k = 0
Inoltre poichè è immediato verificare che i vettori della base hanno anche modulo unitario, la
base scelta si rivela una base ortonormale.
*
Un’altra grandezza geometrica che il prodotto scalare ci consente di determinare algebricamente
è la proiezione ortogonale di un vettore lungo un altro vettore. Definiamo proiezione ortogonale
del vettore a lungo il vettore b la grandezza così definita:
|a|b := a·vers b
Come diretta conseguenza della definizione di prodotto scalare si ha:
|a|b = a·vers b = |a| |vers b| cos α = |a| cos α
Si verifica agevolmente che questa corrisponde esattamente all’idea geometrica di proiezione
ortogonale (vedi figura sotto).
Si verifica inoltre che:
a·i = a1 ,
a·j = a2 ,
a·k = a3
che significa che le componenti di un vettore generico su di una base ortonormale coincidono
con le proiezioni ortogonali del vettore medesimo sui vettori della base data.
1.8
Il prodotto vettoriale
Il prodotto vettoriale di due vettori è un’operazione che, dati due vettori a e b, fornisce come
risultato un terzo vettore c così definito:
c := a × b := (a2 b3 − a3 b2 )i + (a3 b1 − a1 b3 )j + (a1 b2 − a2 b1 )k
ove (a1 , a2 , a3 ) e (b1 , b2 , b3 ) sono le componenti dei due vettori sulla base data. Forniamo un
esempio:
a = 2i + j + 3k,
b = −3i + 2k −→ a × b = 2i − 13j + 3k
Le proprietà del prodotto vettoriale sono le seguenti:
9
Figure 7: richiami per la proiezione ortogonale
P1: a × b = −b × a per ogni coppia di vettori a e b (antisimmetria)
P2: (a + b) × c = a × c + b × c per ogni terna di vettori comunque scelta (linearità);
P3: (αa) × b = α(a × b) per ogni coppia di vettori a e b e per ogni scalare α (omogeneità);
P4: a × a = 0 per ogni vettore a;
Quest’ultima proprietà discende direttamente dalla P1. Diffatti, applicando la P1 per due
vettori eguali, si ottiene:
a × a = −a × a −→ 2a × a = 0
Un modo semplice per effettuare l’operazione di prodotto vettoriale di due vettori è quello
di utilizzare in maniera simbolica l’operazione di determinante di una matrice 3 × 3 che abbia
come prima riga i vettori della base, come seconda riga le componenti del primo vettore e come
terza le componenti del secondo. Si avrà quindi:
i
j
k a × b = a1 a2 a3 = (a2 b3 − a3 b2 )i + (a3 b1 − a1 b3 )j + (a1 b2 − a2 b1 )k
b1 b2 b3 Giova ottenere e ricordare il risultato di questa operazione fra i vettori della base. Utilizzando
la regola del determinante si otterrà:
i j k i × j = 1 0 0 = k
0 1 0 ed, analogamente:
j × k = i,
k×i=j
Utilizzando infine la proprietà P1 si avrà:
j × i = −k,
i × k = −j,
k × j = −i
Forniamo un altro esempio risolto con le proprietà or ora definite:
10
a = 3i + 2j,
b = 6i − 4k,
a × b = (3i + 2j) × (6i − 4k)
Per la proprietà P2, si avrà:
(3i + 2j) × (6i − 4k) = 3i × 6i + 3i × (−4k) + 2j × 6i + 2j × (−4k)
Ancora, applicando le proprietà P3 e P4 otterremo:
3i × 6i + 3i × (−4k) + 2j × 6i + 2j × (−4k) = 0 − 12i × k + 12j × i − 8j × k
che infine, diverrà:
a × b = 12j − 12k − 8i
*
Come il prodotto scalare, anche il prodotto vettoriale è suscettibile di utile interpretazione
geometrica. Verranno ora dimostrate o argomentate tre proprietà geometriche del prodotto
vettoriale, rispettivamente legate alla lunghezza, alla direzione ed al verso del vettore prodotto.
Relativamente alla lughezza o modulo si dimostra che:
|a × b| = |a| |b| sin θ
ovvero che il modulo del prodotto è pari al prodotto dei moduli dei due vettori che si moltiplicano,
moltiplicato ancora per il seno trigonometrico dell’angolo formato dai due vettori medesimi. Si
dimostra quindi che questo modulo è pari all’area del parallelogramma formato dai due vettori,
ossia che ha per lati i due vettori.
La dimostrazione viene di seguito riportata. Dalla definizione di lunghezza di un vettore in
termini delle sue componenti sulla base data, si ha:
|a × b|2 = (a2 b3 − a3 b2 )2 + (a3 b1 − a1 b3 )2 + (a1 b2 − a2 b1 )2
Effettuiamo i quadrati dei binomi indicati in parentesi. Avremo:
|a × b|2 = a22 b23 + a23 b22 − 2a2 a3 b2 b3 + a21 b23 + a23 b21 − 2a1 a3 12 b3 + a21 b21 + a22 b22 − 2a1 a2 b1 b2
Possiamo ora sommare e sottrarre al risultato una medesima quantità algebrica, in modo da
non alterare nulla dato che questa operazione è equivalente a sommare zero. In particolare, la
quantità algebrica che si somma e si sottrae è la seguente:
a21 b21 + a22 b22 + a23 b23
Si otterrà quindi:
|a × b|2
= a21 b21 + a21 b22 + a21 b23 + a22 b21 + a22 b22 + a22 b23 + a23 b21 + a23 b22 + a23 b23
−(a21 b21 + a22 b22 + a23 b23 + 2a2 a3 b2 b3 + 2a1 a3 12 b3 + 2a1 a2 b1 b2 )
Ancora, un’operazione di messa in evidenza ed il riconoscimento di un quadrato di un trinomio della quantità in parentesi tonde ci consentirà di scrivere:
|a × b|2 = (a21 + a22 + a23 )(b21 + b22 + b23 ) − (a1 b1 + a2 b2 + a3 b3 )2
11
ovvero, ricordando la definizione in componenti sia di lunghezza di un vettore sia di prodotto
scalare di due vettori:
|a × b|2 = |a|2 |b|2 − (a·b)2
Infine, dalla definizione geometrica di prodotto scalare, si ottiene:
|a × b|2 = |a|2 |b|2 − |a|2 |b|2 cos2 θ = |a|2 |b|2 (1 − cos2 θ) = |a|2 |b|2 sin2 θ
da cui:
|a × b| = |a| |b| sin θ
Dalla figura che segue si deduce chiaramente che la grandezza |a| |b| sin θ altri non è se non
l’area del parallelogramma ABCD di cui |a| è la misura della base AB e |b| sin θ è la misura
dell’altezza AH.
Figure 8: Modulo del prodotto vettore
Abbiamo finora parlato solo del modulo del prodotto vettoriale. Ci interesseremo ora della
direzione: si dimostra agevolmente che il prodotto vettoriale produce un vettore ortogonale ai
due vettori che si moltiplicano ed, in generale, al piano da questi individuato. Ricordando che
l’ortogonalità di due vettori è sancita dall’annullarsi del loro prodotto scalare, basterà dimostrare
che:
a·(a × b) = 0,
b·(a × b) = 0
Dimostriamo la prima (la dimostrazione della seconda è del tutto analoga). Ricordando
l’espressione in componenti sia del prodotto scalare sia del prodotto vettoriale, si avrà:
a·(a × b) =
=
a1 (a2 b3 − a3 b2 ) + a2 (a3 b1 − a1 b3 )2 + a3 (a1 b2 − a2 b1 )
a1 a2 b3 − a1 a2 b3 + a2 a3 b1 − a2 a3 b1 + a3 a1 b2 − a3 a1 b2 = 0
Infine, per quanto riguarda il verso, vale la regola della mano destra, ossia che se il primo
vettore a lo si fa coincidere con l’indice della mano destra ed il secondo vettore b con il medio,
il vettore a × b coinciderà con il pollice ed il suo verso sarà determinato dal verso del pollice.
Un altro modo di definire questa regola è il seguente: il verso del prodotto vettore è tale che
se ci immaginiamo posti con i piedi sul suo primo estremo e con la testa sul suo secondo estremo,
noi vediamo il primo vettore sovrapporsi al primo con una rotazione antioraria. In particolare
risulta agevole verificarlo per i vettori della base.
12
Figure 9: Direzione e verso del prodotto vettore
*
Un utilizzo ulteriore del prodotto vettore consiste nello stabilire se due vettori sono paralleli.
Due vettori si dicono paralleli se condividono la direzione, indipendentemente da lughezza e
verso. In figura sono disegnati appunti due vettori paralleli. Se ciò vale, allora esiste un numero
α (positivo, se i due vettori condividono anche il verso, negativo in caso contrario) tale che:
a = αb
Si dimostra agevolmente che il prodotto vettore di due vettori paralleli è nullo. Difatti si ha:
a × b = (αb) × b) = α(b × b) = 0
ove sono state applicate in sequenza sle proprietà P3 e P4.
Figure 10: Due vettori paralleli
1.9
Il prodotto triplo o misto
Si definisce prodotto triplo dei tre vettori a, b e c (nell’ordine dato) lo scalare così definito:
a·(b × c)
L’uso delle parentesi tonde (ad indicare che la prima operazione da svolgersi è il prodotto vettore)
è ridondante dal momento che dovrebbe risultare evidente che se le operazioni si svolgessero con
un ordine diverso (ad esempio, effettuando come prima operazione il prodotto scalare) l’intero
prodotto non avrebbe senso.
13
Poichè questo prodotto è definito in termini dei due prodotti precedenti, le sue proprietà
sono deducibili in base alle proprietà degli atri due prodotti. È cioè evidente che:
a·(b × c) = (b × c)·a
ma questa altri non è se non la proprietà di simmetria del prodotto scalare. Ancora vale:
a·(b × c) = −a·(c × b)
ma questa altri non è se non la proprietà di antisimmetria del prodotto vettoriale; e così via.
Oltre a godere delle proprietà che gli derivano direttamente dai prodotti scalare e vettoriale,
il prodotto triplo gode di una proprietà autonoma, definibile di invarianza sotto una permutazione ciclica dei suoi fattori. In altre parole, il risultato del prodotto triplo non cambia (è
cioè invariante) se cambiamo di posto ai suoi tre vettori, non però in maniera del tutto casuale
(ossia secondo una permutazione del tutto generica), ma seguendo la regola che ogni vettore
della terna cambi di posto con quello successivo, ovvero:
a·(b × c) = c·(a × b)
oppure con quello precedente:
a·(b × c) = b·(c × a)
Questa precipua proprietà può essere agevolmente dimostrata per componenti. Si avrà:
a·(b × c) =
=
=
=
=
=
a1 (b2 c3 − b3 c2 ) + a2 (b3 c1 − b1 c3 ) + a3 (b1 c2 − b2 c1 )
a1 b2 c3 − a1 b3 c2 + a2 b3 c1 − a2 c1 c3 + a3 b1 c2 − a3 b2 c1
c1 (a2 b3 − a3 b2 ) + c2 (a3 b1 − a1 b3 ) + c3 (a1 b2 − a2 b1 )
c·(a × b)
b1 (c2 a3 − c3 a2 ) + b2 (c3 a1 − c1 a3 ) + b3 (c1 a2 − c2 a1 )
b·(c × a)
È di un certo interesse discutere alcuni casi di nullità del prodotto triplo. Sono i seguenti:
• Uno dei tre vettori è il vettore nullo;
• Due dei tre vettori sono eguali: in tal caso, se in a·(b × c) valesse che b = c, allora si
annullerebbe il prodotto vettore; se invece fosse a = b oppure a = c il vettore a sarebbe
ortogonale al prodotto vettore e quindi si annullerebbe il prodotto scalare.
*
Analogamente ai due prodotti precedenti, il prodotto triplo è suscettibile di interpretazione
geometrica. Sia θ l’angolo formato fra i vettori c ed a × b, come mostrato in figura. Dalla
definizione di prodotto scalare, si avrà:
c·(a × b) = |c| |a × b| cos θ
A sua volta, anche il modulo di a × b può descriversi geometricamente, in termini dei moduli
dei due vettori e del seno trigonometrico dell’angolo formato. Si avrà quindi:
c·(a × b) = |c| cos θ|a| |b| sin ψ
Ma la quantità |a| |b| sin ψ altri non è se non l’area del parallelogramma individuato dai due
vettori a e b, mentre |c| cos θ è la proiezione ortogonale del vettore c sul vettore a × b. Quindi il
prodotto triplo rappresenta il volume di un parallelepipedo (non retto) di spigoli i tre vettori a,
b e c, che ha per base il parallelogramma di area |a| |b| sin ψ e per altezza |c| cos θ (vedi figura).
14