UNIVERSITÀ DEGLI STUDI DI TRIESTE
LAUREA TRIENNALE IN FISICA
TESI DI LAUREA
IL FENOMENO DELLA SINCRONIZZAZIONE IN MECCANICA CLASSICA
Laureando: Giacomo Catto
Relatore: Prof. Fabio Benatti
Anno accademico 2014-2015
1
2
Abstract
In questo lavoro di tesi viene introdotto il concetto di sincronizzazione completa per sistemi
formati da due o più oscillatori interagenti. Dopo le definizioni di base viene presentato il
formalismo degli esponenti di Lyapunov per poter stabilire, partendo dalle equazioni che
determinano l’evoluzione del sistema, quando questo può trovarsi in regime di sincronizzazione.
L’applicazione del metodo analizzato su sistemi di coppie di oscillatori armonici identici smorzati e
non smorzati e linearmente accoppiati porta alla conclusione che questi non possono
sincronizzare. In particolare si vedrà come le informazioni fornite dagli esponenti di Lyapunov
siano necessarie ma non sufficienti per valutare la possibilità di sincronizzazione. Verrà poi
introdotto un accoppiamento non lineare, per il quale si troverà possibilità di sincronizzazione.
Infine verrà presentato il modello di Kuramoto, generalizzazione dell’esempio in cui viene trovata
sincronizzazione, e verrà presentata una sua applicazione su di un sistema a molte componenti.
3
4
Indice
-INTRODUZIONE
- SINCRONIZZAZIONE: DI COSA SI TRATTA?
- ESPONENTI DI LYAPUNOV E ACCOPPIAMENTO TRA SISTEMI
-RICERCA DI SINCRONIZZAZIONE IN SISTEMI DI DUE OSCILLATORI ARMONICI DI
VARIO TIPO
-MODELLO DI KURAMOTO
-PROBLEMI CON LA MECCANICA QUANTISTICA
-APPENDICI
5
6
INTRODUZIONE
Nel 1656 il matematico e fisico olandese Christiaan Huygens notò un curioso fenomeno: due
orologi a pendolo uguali, appesi allo stesso supporto si muovevano in perfetta antifase.
Perturbando uno dei due, ovvero rompendo la simmetria del loro moto e facendoli uscire dal
regime di antifase, questi modificavano impercettibilmente la loro naturale oscillazione fino a
riportarsi in antifase l’uno rispetto all’altro.
Huygens intuì che ciò era dovuto all’interazione tra i due pendoli attraverso il supporto a cui
erano appesi. Riprodusse le stesse condizioni utilizzando un orologio molto preciso ed uno che
invece perdeva diversi minuti ogni ora, e vide che dopo diverso tempo i due si muovevano alla
stessa velocità e di conseguenza indicavano lo stesso tempo con uguale precisione.
Nella seconda metà del diciannovesimo secolo, un fenomeno simile venne notato dal fisico John
William Strutt Rayleigh su delle canne di un organo: se fatte interagire (anche semplicemente
posizionandole molto vicine tra loro), due canne di lunghezza leggermente diversa l’una dall’altra
tendono a suonare all’unisono.
Ancora nel 1920 W. H. Eccles e J. H. Vincent mostrarono che mettendo in relazione due tubi a
vuoto nei quali veniva prodotta una corrente alternata a due frequenze leggermente diverse
(mettendo le bobine dei generatori abbastanza vicine per poterle far interagire ciascuna con il
campo magnetico dell’altra), questi alteravano spontaneamente le loro frequenze fino a produrre
corrente alla stessa frequenza.
Questi sono alcuni esempi di un fenomeno largamente diffuso in natura e con applicazioni in fisica,
ingegneria, biologia: la sincronizzazione.
7
SINCRONIZZAZIONE: DI COSA SI TRATTA?
Consideriamo un sistema oscillante, come ad esempio un pendolo, la cui evoluzione è descritta da
una funzione
periodica (che può descrivere l’evoluzione nel tempo della posizione o del
momento del nostro sistema, o nel caso del pendolo l’angolo che questo spazza rispetto alla
verticale), ovvero con
dove è il periodo: considerando lo stato del sistema in un
determinato istante, questo si ripeterà identico dopo un tempo pari a . Il sistema ha quindi un
moto periodico con una determinata frequenza. Definiamo “sincronizzazione” quel fenomeno
causato da un’ interazione periodica con l’esterno (può trattarsi di una forza esterna o di altri
oscillatori) che porta il sistema oscillante a variare il proprio moto per evolvere in accordo con
l’interazione. Esistono diversi tipi di sincronizzazione; in questa tesi ci concentreremo sulla
cosiddetta sincronizzazione completa.
Consideriamo ad esempio un sistema formato da due pendoli. Possiamo descriverne lo stato
tramite lo spazio delle fasi, ovvero lo spazio quadridimensionale
determinato dalle possibili
posizioni
e momenti
di ciascun pendolo, ovvero (per
:
Partendo da una configurazione generica dove posizioni e momenti sono diversi
saremo in regime di sincronizzazione se le traiettorie si modificheranno a causa dell’interazione tra
i due sistemi e andranno a coincidere da un istante in poi, ovvero
.
Diremo che due sistemi sincronizzano completamente se le loro traiettorie nello spazio delle fasi
convergono asintoticamente nel tempo a una medesima traiettoria, con convergenza
esponenzialmente veloce. Otterremo quindi che i due sistemi che si sincronizzano coincideranno
nello spazio delle fasi asintoticamente nel tempo, e manterranno questa configurazione di
sovrapposizione dei punti-fase per tutta la loro evoluzione successiva.
8
SISTEMI DINAMICI ED ESPONENTI DI LYAPUNOV
Vogliamo ora definire una quantità che stabilisca univocamente la convergenza o divergenza di
due traiettorie nello spazio delle fasi asintoticamente nel tempo, ovvero la possibilità di
sincronizzazione tra due sistemi. Definiamo, prima di passare al caso reale, un metodo per
valutare l’evoluzione di un sistema generico descritto da una funzione
che rappresenta il
punto nello spazio delle fasi, qui considerato per praticità unidimensionale. Dopodiché passeremo
ad applicare il metodo a sistemi sullo spazio bidimensionale con evoluzione lineare, che
utilizzeremo per gli esempi pratici nei capitoli seguenti. Presi due valori
e
che
corrispondono a due configurazioni iniziali diverse di uno stesso sistema, definiremo esponente di
Lyapunov la quantità
in modo tale da poter evidenziare l’andamento esponenziale nel tempo dell’errore iniziale, che
sarà
Osservazione: dovendo parlare di oscillatori, ovvero di sistemi che evolvono in una regione limitata
dello spazio delle fasi, la distanza tra i punti-fase dei sistemi non può crescere indefinitamente, e
ciò porterebbe inevitabilmente all’annullamento dell’esponente di Lyapunov se non fosse per il
limite sugli stati di errore iniziale tendente a zero.
Notiamo quindi che per esponenti di Lyapunov negativi la distanza tra i punti descriventi il sistema
al tempo si riduce rispetto a quella nella configurazione iniziale, e in particolare avremo
convergenza ad uno stesso punto con velocità esponenziale come richiesto dalla definizione di
sincronizzazione completa. Cerchiamo ora di applicare gli esponenti di Lyapunov a sistemi descritti
sullo spazio delle fasi.
Consideriamo un sistema descritto da un vettore sullo spazio delle fasi bidimensionale dove i
punti-fase sono le coppie coordinata-momento
.
Considereremo sistemi con dinamica lineare, ovvero il cui stato cambia secondo funzioni
indipendenti dallo stato su cui agiscono: le componenti evolveranno da un punto iniziale
con il prodotto scalare con le funzioni
e
rispettivamente, ovvero
Posizione e momento del sistema sono quindi entrambi influenzati da posizione e momento
iniziali. Volendo la distanza tra i due punti fase al tempo , prendiamo in considerazione due
sistemi descritti dai vettori
e
rispettivamente e valutiamo la distanza tra le
componenti dopo averle fatte evolvere per un tempo con le funzioni
e
9
Possiamo quindi riformulare il problema tramite una matrice
ottenendo
Siano
gli autovalori della matrice; gli esponenti di Lyapunov del nostro sistema
saranno dati da
Osservazione: possiamo definire più esponenti di Lyapunov a seconda delle dimensioni del sistema;
generalmente per permettere la sincronizzazione è necessario che tutti gli esponenti siano negativi.
Considereremo quindi l’esponente maggiore che chiameremo
; se questo sarà negativo lo
saranno di conseguenza tutti gli altri.
Scriveremo perciò l’andamento della distanza tra i punti fase dei sistemi componente per
componente in modo analogo a quanto fatto per il caso unidimensionale, utilizzando gli esponenti
di Lyapunov. Otteneniamo
Vediamo quindi che per avere sincronizzazione completa (e quindi
e
asintoticamente nel tempo) dobbiamo avere esponenti di Lyapunov
negativi; in questo modo la distanza tra i punti che descrivono lo stato del sistema diminuirà con il
passare del tempo e di conseguenza le due traiettorie
e
convergeranno
con velocità esponenziale ad una stessa traiettoria, come richiesto dalla definizione di
sincronizzazione data.
10
ESPONENTI DI LYAPUNOV E ACCOPPIAMENTO TRA SISTEMI
In questa sezione analizziamo il ruolo dell’accoppiamento tra due sistemi e valutiamo come
tenerne conto nel calcolo degli esponenti di Lyapunov; in particolare considereremo un
accoppiamento dipendente dalla posizione, che sarà poi quello che utilizzeremo per dei tentativi
pratici di sincronizzazione.
Consideriamo due sistemi oscillanti il cui stato è descritto dai vettori nello spazio delle fasi
per il primo e
per il secondo (per alleggerire la
notazione omettiamo la dipendenza dalla condizione iniziale
e
). L’ evoluzione di questi
stati è data dalla matrice
come visto sopra
Ora facciamo interagire linearmente due sistemi in posizione (ovvero le posizioni di un’oscillatore
sono influenzate dalla distanza tra i due oscillatori, e quindi dalla differenza tra le due posizioni)
con una matrice
dove è una costante che determina l’intensità dell’interazione.
Nota: con questo particolare accoppiamento sceglieremo
e massimamente accoppiati a
, con sistemi indipendenti per
.
Ciò equivale a far evolvere i sistemi con una perturbazione dovuta alla comunicazione tra le due
posizioni. L’evoluzione del sistema sarà quindi di questo tipo
Valutiamo ora la distanza tra le 2 traiettorie per un tempo . Otteniamo
Abbiamo così ottenuto una nuova matrice, della quale possiamo calcolare gli autovalori e di
conseguenza gli esponenti di Lyapunov, tenendo conto dell’interazione di questo tipo tra i due
oscillatori.
11
RICERCA DI SINCRONIZZAZIONE IN SISTEMI DI DUE OSCILLATORI ARMONICI DI VARIO TIPO
Abbiamo ora i mezzi per valutare la possibilità di sincronizzazione completa tra due oscillatori
armonici identici, cioè di stessa massa e frequenza angolare. In appendice 1 è riportata la
risoluzione delle equazioni differenziali per un oscillatore armonico, i cui risultati verranno
utilizzati da qui in avanti.
Due oscillatori identici liberi:
Consideriamo per cominciare il caso più semplice: un sistema di due oscillatori armonici identici
indipendenti. Vogliamo capire se esiste una qualche condizione per la quale questi possano
sincronizzarsi. L’hamiltoniana del sistema sarà
Dove lo stato del sistema sarà descritto dai punti
fasi, la cui evoluzione è data da
Con
e
nello spazio delle
. Valutiamo la distanza tra le traiettorie
Gli esponenti di Lyapunov del sistema si ricavano dagli autovalori
risolvono l’equazione
Gli autovalori sono quindi
Troviamo quindi i due esponenti di Liapunov
12
della matrice i quali
Notiamo che, avendo esponenti di Lyapunov nulli i punti-fase dei nostri sistemi non si
sincronizzano, ma continuano imperturbati la loro oscillazione. Questo risultato non ci stupisce,
infatti non essendoci interazione tra i due non c’è motivo di pensare che questi possano
sincronizzarsi.
Due oscillatori identici accoppiati:
Consideriamo ora il sistema di due oscillatori armonici di hamiltoniana
accoppiati tramite la matrice utilizzata nel paragrafo precedente; un sistema del genere descrive
ad esempio due pendoli collegati tra loro con una molla. Dobbiamo quindi correggere le equazioni
utilizzate sopra con un parametro che indicherà l’intensità dell’interazione. Otterremo
l’equazione per la traiettoria
E di conseguenza la differenza tra le due traiettorie sarà
In questo modo le posizioni
e
sono influenzate dalla distanza
Possiamo calcolare gli autovalori , ottenendo
.
Per
ritroviamo gli autovalori per la matrice del caso degli oscillatori non interagenti. Anche
in questo caso, i due sistemi non sincronizzano; infatti gli esponenti di Lyapunov saranno
Notiamo come l’esponente di Lyapunov vada a zero. Il sistema si muove infatti con nuovi modi
normali; considerando l’Hamiltoniana totale del sistema avremo
13
Questa hamiltoniana è separabile (Appendice 2) e di conseguenza il sistema si muove con modi
normali, ovvero in una configurazione stabile nel tempo; non ci sarà quindi l’andamento
esponenziale che dovrebbe portare i punti-fase a coincidere.
Anche in questo caso, quindi, non c’è possibilità di sincronizzazione.
Due oscillatori identici ugualmente smorzati:
Consideriamo ora un oscillatore armonico smorzato, ovvero che diminuisce esponenzialmente la
propria ampiezza fino a portarla asintoticamente a zero. Ad esempio possiamo immaginare un
pendolo immerso in un fluido; l’attrito toglierà energia al pendolo, che lentamente si fermerà.
L’equazione differenziale che governa il moto sarà
In appendice 2 è riportata la risoluzione all’equazione differenziale che porta alla matrice delle
traiettorie sotto utilizzata, dove è la costante positiva che caratterizza l’entità dello
smorzamento. Facendo la differenza tra i punti-fase ad un tempo otteniamo
Avremo quindi che gli esponenti di Lyapunov, calcolati tramite gli autovalori della matrice, saranno
dove il
è definito in appendice 2. Essendo
un polinomio trigonometrico, otterremo un
esponente di Lyapunov negativo. Ciò significa che le traiettorie nello spazio delle fasi dopo un
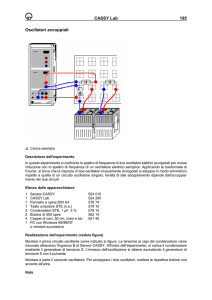
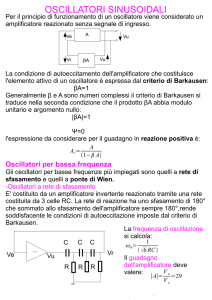
tempo sufficientemente lungo coincideranno. Abbiamo quindi sincronizzazione? NO! In figura
possiamo vedere evidenziata la regione in cui le traiettorie vanno a coincidere: evolvendo
liberamente i due pendoli finiscono per fermarsi e di conseguenza, per far coincidere i loro puntifase nell’origine degli assi nello spazio delle fasi.
14
In figura vediamo, a sinistra la posizione dell’oscillatore smorzato in funzione del tempo. A destra lo spazio
delle fasi dell’oscillatore smorzato la cui traiettoria viene percorsa in senso antiorario.
La sovrapposizione delle traiettorie per tutti i tempi successivi all’arresto degli oscillatori è però
dovuta al loro moto imperturbato, che finisce per arrestarsi senza l’ausilio di forze esterne o
interazioni di alcun tipo. Non avendo più moto quindi non possiamo parlare di sincronizzazione.
Capiamo perciò che esponenti di Lyapunov negativi sono una condizione necessaria ma non
sufficiente per la sincronizzazione di due sistemi.
Due oscillatori identici ugualmente smorzati e accoppiati:
Accoppiamo ora gli oscillatori smorzati come abbiamo fatto per gli oscillatori semplici; un esempio
pratico è dato da due pendoli immersi in un fluido e collegati da una molla. Aggiungiamo quindi il
termine di interazione all’evoluzione ricavata in appendice 3.
Abbiamo quindi la differenza tra le due traiettorie
Analogamente al caso non interagente avremo gli autovalori formati da funzioni trigonometriche
ed esponenziali
, che porteranno a esmponenti di Lyapunov negativi. Infatti, con
uguale
all’autovalore della matrice
, in modo analogo al caso precedente, avremo
Anche qui, come nel caso precedente, i due oscillatori rallentano fino a fermarsi e di conseguenza
non possiamo parlare di sincronizzazione.
15
In definitiva, non abbiamo trovato una configurazione nella quale un sistema formato da due
oscillatori armonici identici interagenti in posizione (smorzati e non) possa trovarsi in regime di
sincronizzazione. Le possibilità che abbiamo considerato sono sostanzialmente di due tipi:
esponenti di Lyapunov nulli (e quindi oscillazione senza possibilità di sincronizzazione) o sistemi
smorzati che arrestano il loro moto (e per i quali, nonostante gli esponenti negativi, non c’è
sincronizzazione). Cerchiamo quindi un diverso tipo di interazione tra due oscillatori armonici.
Accoppiamento in una diversa variabile:
Invece di descrivere l’oscillatore armonico con variabili nello spazio delle fasi, possiamo riscrivere
le equazioni del moto in funzione di un parametro
(in appendice 4) cambiando le variabili con
dove
è l’energia dell’oscillatore. Otteniamo
Consideriamo ora due oscillatori identici scritti in questa forma e accoppiamoli con un termine
proporzionale ad una costante positiva nel seguente modo
L’interazione tra i due oscillatori è quindi proporzionale alla differenza tra i due angoli. Possiamo
riscrivere queste equazioni come un sistema
La soluzione per questa equazione differenziale viene ricavata in appendice 5, ottenendo una
equazione del tipo
E di conseguenza, un esponente di Lyapunov pari a
16
abbiamo quindi un esponente di Lyapunov negativo che indica convergenza tra i due valori
e
asintoticamente nel tempo. Inoltre, notiamo come
e
non si stabilizzano ad un
valore costante: infatti, asintoticamente nel tempo avremo
Gli oscillatori quindi si sincronizzeranno e oscilleranno in fase senza fermarsi. Abbiamo finalmente
trovato un sistema di due oscillatori identici in grado di sincronizzare.
Questo sistema è un’approssimazione per piccole distanze angolari di un modello matematico per
la sincronizzazione di sistemi formati da un numero tendente ad infinito di oscillatori accoppiati,
noto come modello di Kuramoto.
17
MODELLO DI KURAMOTO
Consideriamo un grande numero di oscillatori ciascuno debolmente accoppiato con gli altri con
una costante di accoppiamento . In un sistema del genere osserviamo che, se le frequenze dei
singoli oscillatori sono molto diverse tra loro in relazione all’intensità dell’accoppiamento, questi
continuano a muoversi incoerentemente. Se invece abbiamo un interazione sufficientemente
forte e degli oscillatori simili tra loro, ci sarà una modifica nel moto che porterà alla
sincronizzazione di un determinato cluster di oscillatori. Il modello di Kuramoto studia le
condizioni per la sincronizzazione di sistemi di questo tipo. Consideriamo il moto di un pendolo
descritto dall’angolo spazzato dalla verticale , e l’interazione di tutti gli oscillatori sull’ -esimo
come un campo medio sinusoidale: l’equazione per questo oscillatore sarà
dove è il numero totale di oscillatori e è la frequenza del -esimo oscillatore imperturbato. Le
frequenze sono distribuite secondo una distribuzione di probabilità
centrata in un valore
. L’ -esimo oscillatore modifica il proprio moto di un fattore
oscillatore. Per oscillazioni simili tra loro, e quindi per
linearizzare il problema ottenendo il caso generalizzato a
per ogni -esimo
, possiamo
oscillatori della formula 35).
Nel modello di Kuramoto, con distanze angolari piccole lo studio della sincronizzazione si effettua
tramite un parametro d’ordine per descrivere la dinamica dell’intero sistema, immaginando
l’angolo
descritto da un punto che ruota nel tempo sulla circonferenza unitaria
Il parametro d’ordine sarà un vettore sulla circonferenza unitaria definito dalla seguente formula
Dove definiamo un parametro di coerenza
che spazza la fase media, definito da
tra
18
e
corrispondente alla lunghezza del vettore
che quantificherà la variazione tra le frequenze dell’oscillatore, e una fase media
definita da
In sistemi di oscillatori identici, vediamo che se i pendoli saranno completamente sincronizzati,
e quindi si muoveranno perfettamente in fase con
per ogni , avremo che il
parametro
raggiungerà valore costante 1. Per valutare la possibilità di sincronizzazione si
guarderà quindi a questi due parametri.
Moltiplicando questo per
e considerando soltanto la parte immaginaria otteniamo
Da qui, ricaviamo nuovamente l’equazione del moto del singolo oscillatore; notiamo però che
questo sarà funzione delle quantità medie
e
, ovvero
Tramite simulazioni numeriche (svolte da Kuramoto) sulla soluzione stazionaria di questo modello
(ovvero per
costante) si è visto esistere un valore critico della costante di accoppiamento, che
chiameremo , sopra il quale gli oscillatori potranno evolvere in 2 modi: se
l’oscillatore -esimo si sincronizzerà con gli altri alla frequenza ; se
l’oscillatore esimo varierà il proprio moto sotto l’effetto degli altri, senza però stabilizzarsi alla stessa
frequenza.
Possiamo utilizzare il modello di Kuramoto per valutare la possibilità di sincronizzazione tra sistemi
di più oscillatori. Un esempio dove possiamo applicare questo modello lo troviamo nell’anno 2000
a Londra, all’inaugurazione del Millennium Bridge, un ponte in acciaio sospeso sul Tamigi. Il giorno
dell’inaugurazione ci si rese conto che il passaggio di circa 200 persone in contemporanea causava
una lieve oscillazione del ponte, la quale a sua volta causava la sincronizzazione dei passi delle
persone che lo attraversavano, che si ritrovavano involontariamente a camminare ondeggiando
allo stesso ritmo delle altre persone, incrementando le oscillazioni del ponte. Due giorni dopo
l’inaugurazione il ponte venne chiuso per manutenzioni e riaperto dopo 2 anni. Possiamo
considerare il ponte e le persone in moto su di esso come oscillatori di uno stesso sistema: il
19
ponte di massa sarà un oscillatore armonico smorzato il cui spostamento orizzontale
modificato dal passaggio di pedoni secondo la formula
sarà
Dove è la posizione dell’ -esimo pedone nel proprio moto destra-sinistra e è la massima forza
che viene mediamente impressa da ogni pedone. Di contro l’oscillazione del ponte modifica la
marcia dell’ -esimo pedone secondo la formula
Dove è la frequenza di oscillazione dell’ -esimo pedone con distribuzione
, quantifica la
sensibilità media dei pedoni all’oscillazione
del ponte,
è la fase dell’oscillazione del
ponte e un parametro che tiene conto dell’oscillazione precedente all’istante di tempo .
Tramite simulazioni numeriche si trova che raggiunto un numero critico di persone che
attraversano il ponte , questo inizia a oscillare con ampiezza sempre crescente; il ritmo dei passi
delle persone che attraversano il ponte sincronizzerà soltanto se avremo almeno
, mentre al di
sotto di questo valore non si noterà nessuna oscillazione coerente. Nel caso più semplice, con
e distribuzione
centrata nel valore di risonanza del ponte
numero critico di
che nel nostro caso equivale a poco meno di 200 persone.
20
avremo un
SINCRONIZZAZIONE IN MECCANICA QUANTISTICA: LIMITI
Possiamo ora chiederci se i concetti introdotti per la sincronizzazione di sistemi classici possono
essere applicati anche a sistemi quantistici. Se consideriamo un sistema classico, il suo stato viene
descritto da un punto sullo spazio delle fasi e la traiettoria di quel punto indica la sua evoluzione
nel tempo. Due sistemi descritti da una traiettoria chiusa si sincronizzeranno se, interagendo,
evolveranno fino a stabilizzarsi su di una traiettoria comune. Cercando di estendere questa
definizione ad un sistema quantistico troviamo un ostacolo che complica notevolmente il concetto
di sincronizzazione, ovvero il principio di indeterminazione di Heisemberg: il compiere una
misurazione su un sistema quantistico altera lo stato del sistema stesso. In particolare, se vogliamo
misurare la posizione di un sistema inevitabilmente ne alteriamo il momento , e viceversa
misurando il momento del sistema ne alteriamo la posizione. Definendo l’incertezza sulla nostra
conoscenza della posizione
e sulla nostra conoscenza del momento , possiamo quantificare
l’impossibilità di avere una conoscenza infinitamente precisa del nostro sistema, ovvero
dove è la costante di Planck. Portando queste considerazioni nello spazio delle fasi otteniamo
che il sistema non è più descritto da un punto-fase che ne determina posizione e momento, ma
bensì da un’area. Non possiamo più considerare la sincronizzazione come sovrapposizione dei
punti-fase perché il concetto di punto-fase non è più valido. L’esponente di Lyapunov inoltre non
può più essere descritto come nel caso classico, poiché non possiamo fare il limite per la
convergenza degli stati iniziali ad uno stesso punto. Abbiamo quindi bisogno di una diversa
definizione di sincronizzazione e di diversi strumenti per valutare l’evoluzione di sistemi
quantistici.
21
CONCLUSIONI
Abbiamo analizzato semplici sistemi di due oscillatori accoppiati linearmente e abbiamo concluso
che questi non possono in alcun modo sincronizzare. Accoppiamenti non lineari come quello che ci
ha portato al modello di Kuramoto invece possono avere esponenti di Lyapunov negativi e quindi
trovarsi in regime di sincronizzazione. Lo studio degli esponenti di Lyapunov è quindi un potente
mezzo per valutare l’andamento dell’evoluzione di un sistema; nonostante ciò, la difficoltà di
calcolarli in sistemi più complessi ha portato alla ricerca di metodi alternativi per valutare la
sincronizzazione. Il modello di Kuramoto ne è un esempio, nel quale invece degli esponenti di
Lyapunov andiamo a valutare il parametro di coerenza
. Altre possibilità sono date da
simulazioni numeriche su casi specifici, per i quali è possibile stimare gli esponenti di Lyapunov.
22
APPENDICI
1_OSCILLATORE ARMONICO
Consideriamo un oscillatore armonico, come ad esempio una massa
molla di constante elastica . L’hamiltoniana del sistema sarà
collegata a un capo di una
L’equazione che governa il moto dell’oscillatore è
Dove
è la coordinata lungo l’asse orizzontale dello spazio delle fasi. Definendo
scrivendo l’equazione per il momento
e
otteniamo
Che possiamo scrivere come
Risolvendo questa come un’equazione differenziale otteniamo che il punto-fase evolve dallo stato
iniziale con
dove
è la matrice di evoluzione scritta sopra. Espandendo l’esponenziale in serie otteniamo
L’evoluzione del moto dell’oscillatore nello spazio delle fasi avrà quindi la forma
L’importanza dello studio dell’oscillatore armonico è dovuta al fatto che, nel limite di piccole
oscillazioni tutti gli oscillatori possono essere approssimati ad un oscillatore armonico; trovando le
condizioni entro le quali due oscillatori armonici sincronizzano, avremo una soluzione
approssimativamente valida per una vasta gamma di oscillatori.
23
2_HAMILTONIANA SEPARABILE PER OSCILLATORI ARMONICI ACCOPPIATI
L’hamiltoniana del sistema è
Attraverso un cambio di coordinate riscriveremo questa hamiltoniana in forma separabile.
Definiamo la matrice
Con la quale otteniamo
Possiamo riscrivere la matrice utilizzando i suoi auto valori
di trasformazione che troveremo dopo ottenendo
e
e una matrice
Da qui possiamo ridefinire le coordinate
E quindi riscrivere l’hamiltoniana in forma separabile
Abbiamo quindi trovato che il sistema è equivalente a 2 oscillatori armonici indipendenti, di
frequenza
e
.
3_OSCILLATORE ARMONICO SMORZATO
Per un oscillatore armonico smorzato avremo un’equazione del moto del tipo
Dove è la costante positiva che indica l’entità dello smorzamento. Trovando le radici del
polinomio caratteristico ci riconduciamo ad un’equazione del tipo
24
La cui derivata prima sarà
Imponendo le condizioni iniziali troviamo una matrice di evoluzione del tipo
Per
ritroviamo l’equazione di evoluzione per l’oscillatore non smorzato.
Chiameremo
gli autovalori della matrice appena trovata, ovvero le soluzioni dell’equazione
sarà una funzione trigonometrica, e che di certo non andrà come un esponenziale
asintoticamente nel tempo.
Vediamo che
4_OSCILLATORE IN
Consideriamo l’oscillatore armonico dell’appendice 1 di Hamiltoniana
Data l’energia
del sistema questa descrive un’ellisse nello spazio delle fasi.
Possiamo fare un cambio di coordinate per trasformare questa ellisse in una circonferenza
ridefinendo le quantità
Da questa ricaviamo il valore del parametro
ottenendo
facendo il rapporto tra queste due equazioni,
25
Otteniamo quindi una nuova formulazione per l’oscillatore armonico facendo la derivata di questa
quantità
5_SOLUZIONE PER COPPIA DI OSCILLATORI IN
L’equazione differenziale da risolvere è
Possiamo riscriverla con una terminologia più comoda chiamando
,e considerando il vettore
il vettore con componenti
e la matrice
ottenendo
Non essendo la matrice invertibile troviamo la soluzione a questa equazione differenziale
applicando la matrice a tutti gli elementi del sistema e quindi valutando la differenza tra i due
sistemi, con la relazione sulla matrice
, otteniamo
La cui soluzione è
Ottenendo
Considerando due oscillatori uguali avremo quindi
26
Da cui ricaviamo immediatamente l’esponente
di Lyapunov
vediamo come l’esponente di Lyapunov sia negativo, e quindi ci sia sincronizzazione per questo
caso.
BIBLIOGRAFIA
A.Pikovsky, M.Rosenblum, J.Kurths; Synchronisation, An Universal Concept in Nonlinear Science,
Cambridge
Y.Y.Lu; Introduction to Dynamical Systems and Chaos; Università di Hong Kong
C.W.Wu; Synchronization in Complex Networks of Nonlinear Dynamical Sistems, World Scientific
A.Arenas, A.Diaz-Guilera, J.Kurths, Y.Moreno, C.Zhou; Synchronization in complex networks;
physics report, 12 dicembre 2008
S.H.Strogatz; Crowd synchrony on the Millennium Bridge; Nature vol. 438
S.H.Strogatz; From Kuramoto to Crawford: exploring the onset of synchronization in populations of
coupled oscillators; Elsevier
27