Introduzione al calcolo differenziale
Federico Lastaria, Analisi e Geometria 1
Politecnico di Milano
Corso di Analisi e Geometria 1
Federico Lastaria
[email protected]
Introduzione al calcolo differenziale
20 Ottobre 2015
Indice
1 Derivate
3
1.1
Definizione di derivata . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
3
1.2
Differenziabilità e derivabilità . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
4
1.3
Derivabilità implica continuità . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5
1.4
Riassunto di modi equivalenti di definire le funzioni derivabili . . . . . . . . . . . . . .
6
1.4.1
Derivata come limite del rapporto incrementale . . . . . . . . . . . . . . . . . .
6
1.4.2
Funzione differenziabile . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6
1.4.3
Formulazione di Weierstrass . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7
1.4.4
Formulazione di Carathéodory . . . . . . . . . . . . . . . . . . . . . . . . . . .
7
2 Regole per il calcolo delle derivate
8
2.1
Derivata della somma . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8
2.2
Derivata del prodotto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8
2.3
Derivata della funzione composta . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9
2.3.1
2.4
2.5
2.6
Dimostrazione basata sulla formulazione à la Carathéodory . . . . . . . . . . .
10
Derivata della funzione inversa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1
Derivata della funzione reciproca . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
f
Derivata del quoziente . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
10
n
11
11
2.7
Derivata di x , n ∈ N . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
12
2.8
Alcuni limiti importanti . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
12
2.9
Derivata di exp e log . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
14
α
2.10 Derivata di x , (α ∈ R, x > 0) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
16
2.11 Derivata di sin x e cos x . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
16
2.12 Il differenziale. Approssimazione al primo ordine. . . . . . . . . . . . . . . . . . . . . .
18
3 Nota storica. Fluenti e flussioni
19
4
21
Funzioni derivabili su un intervallo
Pag. 1
Introduzione al calcolo differenziale
Federico Lastaria, Analisi e Geometria 1
4.1
Punti di massimo o minimo locale per una funzione . . . . . . . . . . . . . . . . . . . .
21
4.2
Teorema di Fermat
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
21
4.3
Teorema di Rolle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
23
4.4
Teorema di Lagrange (o del valore medio, o degli incrementi finiti) . . . . . . . . . . .
23
4.5
Teorema di Cauchy (o degli incrementi finiti) . . . . . . . . . . . . . . . . . . . . . . .
24
4.6
Funzioni con derivata nulla su un intervallo . . . . . . . . . . . . . . . . . . . . . . . .
26
4.7
Funzioni con derivate uguali su un intervallo . . . . . . . . . . . . . . . . . . . . . . . .
27
4.8
Funzioni crescenti o decrescenti . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
27
4.9
Funzioni strettamente monotòne . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
28
4.10 Massimi e minimi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
28
4.11 Regole di de L’Hospital . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
29
4.12 Alcuni limiti importanti . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
32
4.13 Confronto tra infiniti . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
33
5 Rapporto tra derivabilità e limiti della derivata
6
5.1
Relazione tra derivate e limiti delle derivate . . . . . . . . . . . . . . . . . . . . . . . .
35
5.2
Osservazioni . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
37
5.3
Punti angolosi e di cuspide
38
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Formule di Taylor
6.1
6.2
6.3
6.4
6.5
7
35
41
Il polinomio di Taylor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
Funzioni di classe C
k
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
42
Studio locale. Formula di Taylor con il resto nella forma di Peano . . . . . . . . . . . .
42
6.3.1
Alcune importanti approssimazioni locali . . . . . . . . . . . . . . . . . . . . .
43
Studio su un intervallo. Formula di Taylor con il resto nella forma di Lagrange . . . .
44
6.4.1
Un’applicazione: stima dell’errore . . . . . . . . . . . . . . . . . . . . . . . . . .
46
Complementi: Prime nozioni sulle funzioni sviluppabili in serie di potenze. . . . . . . .
47
Funzioni convesse
7.1
41
50
Interpretazione del segno della derivata seconda . . . . . . . . . . . . . . . . . . . . . .
52
Pag. 2
Introduzione al calcolo differenziale
1
Federico Lastaria, Analisi e Geometria 1
Derivate
1.1
Definizione di derivata
f
Sia I −→ R una funzione definita su un intervallo aperto I dell’asse reale e sia x0 un punto di I. Si
chiama rapporto incrementale di f relativo ad x0 la funzione
x 7−→
f (x) − f (x0 )
x − x0
(1.1)
che risulta definita in I \ {x0 }.
f
Definizione 1.1 (Derivata come limite del rapporto incrementale. Cauchy, 1821). Sia I −→ R una
funzione definita su un intervallo aperto I ⊂ R e sia x0 in I. Si dice che f è derivabile in x0 se esiste
il limite
f (x) − f (x0 )
(1.2)
f 0 (x0 ) = lim
x→x0
x − x0
Il valore f 0 (x0 ) di questo limite si chiama la derivata di f nel punto x0 .
Posto x − x0 = h, tale limite si scrive nella forma equivalente
f 0 (x0 ) = lim
h→0
f (x0 + h) − f (x0 )
h
(1.3)
Per denotare la derivata di f in x0 si usano anche altre le notazioni, tra le quali:
df
df
˙
Df (x0 ) f (x0 )
(x0 )
dx x=x0
dx
Derivata a destra e a sinistra
La definizione di derivata si puøestendere al caso in cui il punto x0 sia il primo o il seondo estremo di
un intervallo. Supponiamo che la funzione f , a valori reali, sia definita su un intervallo chiuso [a, b].
Diremo che f è derivabile a destra nel punto x0 = a, se esiste (si intende finito) il limite del rapporto
incrementale quando x tende al punto x0 da destra, cioè quando esiste finito il
lim
x→x+
0
f (x) − f (x0 )
x − x0
(1.4)
Se tale limite esiste finito, si chiamerà derivata a destra e lo si indicherà con
0
f+
(x0 )
In modo analogo, una funzione reale f , definita su un intervallo [a, b], si dice derivabile in x0 = b se
esiste il limite
f (x) − f (x0 )
lim−
(1.5)
x − x0
x→x0
che si denoterà (quando esiste finito) con il simbolo
0
f−
(x0 )
e si chiamerà derivata a sinistra nel punto b.
0
0
A volte useremo ancora il simbolo f 0 , al posto di f+
o f−
, quando il significato dei simboli è chiaro
dal contesto.
Pag. 3
Introduzione al calcolo differenziale
Federico Lastaria, Analisi e Geometria 1
Funzioni derivabili in un intervallo
f
Diremo che una funzione I −→ R, definita su un intervallo I ⊂ R (che potrebbe essere chiuso o no,
limitato o no) è derivabile in I, se ammette derivata in tutti i punti interni di I e inoltre ammette
derivata destra nel primo estremo di I e derivata sinistra nel secondo estremo di I, quando questi
estremi appartengono a I.
Se f è derivabile in tutto I, si viene allora a definire una nuova funzione
f0
I −→ R
(1.6)
chiamata la funzione derivata di f , anch’essa definita su I.
Se anche f 0 è derivabile su tutto I, avremo la derivata seconda f 00 , ancora definita su I e cosı̀ via.
La derivata n-esima (se esiste) si denota con il simbolo f (n) (e si pone allora f (0) = f ).
1.2
Differenziabilità e derivabilità
f
Definizione 1.2 (Funzione differenziabile). Una funzione I −→ R, definita in un intorno I del punto
x0 , si dice differenziabile in x0 ∈ R se esiste un numero a ∈ R per il quale si possa scrivere
f (x0 + h) = f (x0 ) + ah + o(h)
(1.7)
Ricordiamo che la richiesta che il resto in (1.7) sia un o(h) significa, per definizione di o(h), che
lim
h→0
f (x0 + h) − f (x0 ) − ah
=0
h
f
Per una funzioni reale di una variabile reale I −→ R, definita su un intorno I di x0 ∈ R, le due
condizioni di essere derivabile in x0 (nel senso usuale dell’esistenza del limite del rapporto incrementale)
e di essere differenziabile in x0 sono equivalenti:
f è derivabile in x0 se e solo se è differenziabile in x0 .
I prossimi due teoremi lo dimostrano.
Teorema 1.3 (Derivabilità implica differenziabilità). Se una funzione f è derivabile in x0 , con
derivata f 0 (x0 ), allora f è differenziabile in x0 . Precisamente, vale:
f (x0 + h) = f (x0 ) + f 0 (x0 ) h + o(h)
(1.8)
Dimostrazione. Bisogna dimostrare che f (x0 + h) − f (x0 ) − f 0 (x0 ) h è o(h):
f (x0 + h) − f (x0 )
f (x0 + h) − f (x0 ) − f 0 (x0 ) h
0
lim
= lim
− f (x0 )
h→0
h→0
h
h
= f 0 (x0 ) − f 0 (x0 )
=
0
Q.E.D.
Pag. 4
Introduzione al calcolo differenziale
Federico Lastaria, Analisi e Geometria 1
Teorema 1.4 (Differenziabilità implica derivabilità). Se f è differenziabile in x0 , allora f è derivabile
in x0 . Più precisamente, supponiamo che esista a ∈ R per il quale valga
f (x0 + h) = f (x0 ) + a · h + o(h)
(1.9)
Allora f è derivabile in x0 e f 0 (x0 ) = a.
Dimostrazione. Infatti, se vale la condizione di differenziabilità (1.9), il rapporto incrementale di f è
dato da:
o(h)
f (x0 + h) − f (x0 )
=a+
h
h
Quindi il limite del rapporto incrementale esiste ed è uguale al numero a:
f (x0 + h) − f (x0 )
o(h)
lim
= lim a +
h→0
h→0
h
h
o(h)
= a + lim
h→0 h
= a
Quindi f è derivabile e f 0 (x0 ) = a.
Esercizio 1.5. Dall’uguaglianza
funzione x3 è 3x2 .
1.3
Q.E.D.
(x + h)3 = x3 + 3x2 h + 3xh2 + h3
dedurre che la derivata della
Derivabilità implica continuità
Teorema 1.6 (Derivabilità implica continuità). Se f è derivabile in x0 , allora è continua in x0 .
Dimostrazione. Partiamo dall’identità
f (x) = f (x0 ) +
f (x) − f (x0 )
(x − x0 )
x − x0
Per x → x0 , passando ai limiti:
lim f (x) = f (x0 ) + lim
x→x0
x→x0
f (x) − f (x0 )
lim (x − x0 ) = f (x0 ) + f 0 (x0 ).0 = f (x0 )
x→x0
x − x0
Questo prova che f è continua in x0 .
Un’altra dimostrazione è la seguente. Poiché f è differenziabile in x0 , si scrive
f (x0 + h) = f (x0 ) + f 0 (x0 ) h + o(h)
Passando al limite per h → 0:
lim f (x0 + h)
h→0
=
lim [f (x0 ) + f 0 (x0 )h + o(h)]
h→0
= f (x0 ) + lim f 0 (x0 )h + lim o(h)
h→0
h→0
= f (x0 ) + lim f 0 (x0 )h + lim h
h→0
h→0
o(h)
h
= f (x0 ) + 0 + 0 = f (x0 )
Q.E.D.
Pag. 5
Introduzione al calcolo differenziale
1.4
1.4.1
Federico Lastaria, Analisi e Geometria 1
Riassunto di modi equivalenti di definire le funzioni derivabili
Derivata come limite del rapporto incrementale
f
Definizione 1.7 (Cauchy, 1821). Sia I −→ R una funzione definita su un intervallo aperto I ⊂ R e
sia x0 in I. Si dice che f è derivabile in x0 se esiste (finito) il limite
f 0 (x0 ) = lim
x→x0
f (x) − f (x0 )
x − x0
(1.10)
Il valore f 0 (x0 ) di questo limite si chiama la derivata di f nel punto x0 .
Posto x − x0 = h, tale limite si scrive nella forma equivalente
f (x0 + h) − f (x0 )
h→0
h
f 0 (x0 ) = lim
1.4.2
(1.11)
Funzione differenziabile
f
Definizione 1.8 (Funzione differenziabile, con la notazione dell’o-piccolo). Una funzione I −→ R,
definita in un intorno I del punto x0 , si dice differenziabile in x0 ∈ R se esiste un numero f 0 (x0 ) ∈ R
per il quale valga l’uguaglianza
f (x0 + h) = f (x0 ) + f 0 (x0 )h + o(h)
(1.12)
Una piccola variante di questa formulazione consiste nello scrivere il resto nella forma h α(h), dove
limh→0 α(h) = 0.
f
Definizione 1.9. Una funzione I −→ R, definita in un intorno I del punto x0 , si dice differenziabile
in x0 ∈ R, con derivata f 0 (x0 ), se si può scrivere
f (x0 + h) = f (x0 ) + f 0 (x0 ) h + h α(h)
(1.13)
dove limh→0 α(h) = 0.
L’uguaglianza (1.13) determina il valore1 di α(h), se h 6= 0. Se definiamo α(h) anche per h = 0
ponendo α(0) = 0, la funzione α risulta continua in 0.
1 Infatti,
per h 6= 0 l’uguaglianza (1.13) determina α(h) =
f (x0 +h)−f (x0 )−f 0 (x0 ) h
.
h
Pag. 6
Introduzione al calcolo differenziale
1.4.3
Federico Lastaria, Analisi e Geometria 1
Formulazione di Weierstrass
f
Definizione 1.10 (Weierstrass, 1861). Una funzione I −→ R, definita in un intorno I del punto x0 ,
si dice differenziabile in x0 ∈ R se esiste un numero f 0 (x0 ) ∈ R e se esiste una funzione r(x), continua
in x0 e soddisfacente r(x0 ) = 0, che soddisfino
f (x) = f (x0 ) + f 0 (x0 )(x − x0 ) + r(x)(x − x0 )
(1.14)
Si vede subito che questa condizione è equivalente alla condizione (1.13), dove la funzione α(h) è
continua in h = 0 e α(0) = 0. Ovviamente, per passare dalla formulazione (1.13) alla (1.14) basta
porre h = x − x0 e α(h) = α(x − x0 ) = r(x).
1.4.4
Formulazione di Carathéodory
Definizione 1.11 (Carathéodory, 1950). Una funzione f , definita su un intervallo aperto U ⊂ R, si
dice differenziabile nel punto x0 ∈ U se esiste una funzione ϕx0 (x) che è continua in x0 e per la quale
si ha, per ogni x ∈ U ,
f (x) = f (x0 ) + ϕx0 (x)(x − x0 )
(1.15)
Il valore che la funzione ϕx0 (x) assume nel punto x0 è la derivata f 0 (x0 ) di f in x0 .
Facciamo qualche commento su questa formulazione di Carathéodory2 .
L’interpetazione geometrica della funzione ϕx0 (x) è ovvia. Infatti, da (1.15) si ricava subito che,
per x 6= x0 ,
f (x) − f (x0 )
ϕx0 (x) =
(1.16)
x − x0
Dunque ϕx0 (x) non è altro che il rapporto incrementale di f relativo al punto x0 , ossia è la pendenza
della retta secante che passa per i punti (x0 , f (x0 )) e (x, f (x)). La definizione alternativa (1.15)
enfatizza il fatto che le pendenze ϕx0 (x) delle rette secanti si avvicinano alla pendenza della retta
tangente in modo continuo, un’osservazione interessante e in genere poco sottolineata. La richiesta
che ϕx0 (x) sia continua in x0 significa che esiste il limite
ϕx0 (x0 ) = lim ϕx0 (x) = lim
x→x0
x→x0
f (x) − f (x0 )
x − x0
e che quindi ϕx0 (x0 ) = f 0 (x0 ).
Si vede subito che la condizione (1.15) e la continuità di ϕx0 (x) in x0 implicano che f (x) è continua
in x0 .
Utilizzeremo la formulazione di Carathéodory nella dimostrazione del teorema (2.8) sulla derivata
della funzione composta.
2 Constantin
Carathéodory (1873-1950).
Pag. 7
Introduzione al calcolo differenziale
2
Federico Lastaria, Analisi e Geometria 1
Regole per il calcolo delle derivate
2.1
Derivata della somma
Ricordiamo che la somma di due funzioni f e g è la funzione definita da
(f + g)(x) = f (x) + g(x)
Teorema 2.1 (Derivata della somma). Siano f e g funzioni a valori reali, definite su un intorno del
punto x0 e entrambe derivabili in x0 . Allora la funzione f + g è derivabile in x0 e si ha
(f + g)0 (x0 ) = f 0 (x0 ) + g 0 (x0 )
(2.1)
Dimostrazione. Il rapporto incrementale, a partire da x0 , della funzione f + g si scrive:
(f + g)(x) − (f + g)(x0 )
f (x) − f (x0 ) g(x) − g(x0 )
=
+
x − x0
x − x0
x − x0
Quando x tende a x0 il secondo membro tende a f 0 (x0 ) + g 0 (x0 ).
2.2
Q.E.D.
Derivata del prodotto
Date due funzioni f e g, a valori reali, il loro prodotto f · g (oppure f g) è la funzione definita da
(f · g)(x) = f (x) · g(x)
Teorema 2.2 (Derivata del prodotto. Regola di Leibniz). Siano f (x) e g(x) funzioni a valori reali,
definite su un intorno del punto x0 e entrambe derivabili in x0 . Allora la funzione prodotto f (x)g(x)
è derivabile in x0 e
(f · g)0 (x0 ) = f 0 (x0 )g(x0 ) + f (x0 )g 0 (x0 )
(2.2)
Prima dimostrazione. Scriviamo il rapporto incrementale della funzione prodotto f · g. Notiamo
che vale l’identità
g(x) − g(x0 )
f (x) − f (x0 )
f (x)g(x) − f (x0 )g(x0 )
= f (x)
+ g(x0 )
x − x0
x − x0
x − x0
che si ottiene con il trucco di sommare e sottrarre a secondo membro il termine f (x)g(x0 ). Quando x
g(x) − g(x0 )
tende a x0 , il termine f (x) tende a f (x0 ) (per la continuità di f in x0 ), il rapporto
tende
x − x0
f (x) − f (x0 )
a g 0 (x0 ) e il rapporto
tende a f 0 (x0 ). Quindi il limite del secondo membro, quando x
x − x0
tende a x0 , esiste ed è uguale a
f (x0 )g 0 (x0 ) + f 0 (x0 )g(x0 )
Dunque la regola 2.2 è dimostrata.
Seconda dimostrazione. Per ipotesi, f e g sono differenziabili in x0 . Questo significa che
f (x0 + h) = f (x0 ) + f 0 (x0 )h + o(h),
g(x0 + h) = g(x0 ) + g 0 (x0 )h + o(h)
Pag. 8
Introduzione al calcolo differenziale
Federico Lastaria, Analisi e Geometria 1
Scriviamo per semplicità p(x) = f (x)g(x). Allora p(x0 + h) = f (x0 + h)g(x0 + h) si scrive nel modo
seguente:
p(x0 + h)
=
=
=
+
f (x0 + h)g(x0 + h)
f (x0 ) + f 0 (x0 )h + o(h) g(x0 ) + g 0 (x0 )h + o(h)
p(x0 ) + f 0 (x0 )g(x0 ) + f (x0 )g 0 (x0 ) h +
(f (x0 ) + g(x0 ))o(h) + f 0 (x0 )g 0 (x0 )h2 + f 0 (x0 )ho(h) + g 0 (x0 )ho(h) + o(h)o(h)
|
{z
}
Tutto questo termine, chiamiamolo R(h), è un o(h)
Il resto R(h) è un o(h), in quanto somma di cinque termini, ciascuno dei quali è un o(h). Infatti, basta
notare quanto segue: una costante per un o(h) è un o(h); h2 è un o(h); ho(h) è un o(h); e o(h)o(h) è un
o(h). Queste ultime affermazioni sono tutte ovvie. In definitiva abbiamo scritto il prodotto p(x0 + h)
come:
p(x0 + h) = p(x0 ) + f 0 (x0 )g(x0 ) + f (x0 )g 0 (x0 ) h + o(h)
(2.3)
Allora possiamo concludere che il prodotto p(x) è differenziabile in x0 e che la sua derivata in x0 vale
proprio
p0 (x0 ) = f 0 (x0 )g(x0 ) + f (x0 )g 0 (x0 )
Q.E.D.
2.3
Derivata della funzione composta
Teorema 2.3 (Derivata della funzione composta).3 Se è definita la funzione composta g ◦ f , f è
derivabile in x0 e g è derivabile in y0 = f (x0 ), allora g ◦ f è derivabile in x0 e si ha
(g ◦ f )0 (x0 ) = g 0 (y0 ) · f 0 (x0 )
(2.4)
Dimostrazione. L’ipotesi che f sia derivabile in x0 si puøscrivere
f (x0 + h) = f (x0 ) + f 0 (x0 ) · h + α(h) · h
(2.5)
dove α(h) → 0 quando h → 0. Posto f 0 (x0 ) · h + α(h) · h = k, la 2.5 si scrive
f (x0 + h) = f (x0 ) + k
(2.6)
dove la quantità k tende a zero quando h tende a zero. Similmente, l’ipotesi che g sia derivabile in
y0 = f (x0 ) si scrive
g(y0 + k) − g(y0 ) = g 0 (y0 ) · k + β(k) · k
(2.7)
dove β(k) → 0 quando k → 0. Scriviamo ora il rapporto incrementale di g ◦ f :
1
g(f (x0 + h)) − g(f (x0 )) =
h
1
g(f (x0 ) + k) − g(f (x0 ))
(per la 2.6)
h
1
=
g(y0 + k) − g(y0 )
h
1 0
g (y0 ) · k + β(k) · k
(per la 2.7)
=
h
k
k
= g 0 (y0 ) · + β(k) ·
h
h
f (x0 + h) − f (x0 )
f (x0 + h) − f (x0 )
= g 0 (y0 ) ·
+ β(k) ·
h
h
3 Questa
regola è chiamata chain rule (regola della catena) in inglese.
Pag. 9
Introduzione al calcolo differenziale
Federico Lastaria, Analisi e Geometria 1
Quando h tende a zero, il termine g 0 (y0 ) ·
f (x0 + h) − f (x0 )
tende a g 0 (y0 ) · f 0 (x0 ), mentre il termine
h
f (x0 + h) − f (x0 )
(prodotto di una quantità che tende a zero per una che tende a un limite
h
finito) tende a zero. La formula 2.7 è quindi dimostrata.
Q.E.D.
β(k) ·
2.3.1
Dimostrazione basata sulla formulazione à la Carathéodory
La formulazione à la Carathéodory si presta bene a dimostrare la regola della catena per la derivata
della funzione composta.
Teorema 2.4 (Regola della catena). Se è definita la funzione composta g ◦ f , f è derivabile in x0 e
g è derivabile in y0 = f (x0 ), allora g ◦ f è derivabile in x0 e si ha
(g ◦ f )0 (x0 ) = g 0 (f (x0 )) · f 0 (x0 )
(2.8)
Dimostrazione. Dal momento che f è derivabile in x0 , esiste una funzione ϕ continua in x0 , per la
quale vale
f (x) − f (x0 ) = ϕ(x)(x − x0 )
(2.9)
Si ha ϕ(x0 ) = f 0 (x0 ). Analogamente, esiste una funzione ψ continua in y0 = f (x0 ), per la quale vale
g(y) − g(y0 ) = ψ(y)(y − y0 )
(2.10)
con ψ(y0 ) = g 0 (y0 ). Posto f (x) = y e f (x0 ) = y0 , risulta allora:
g(f (x)) − g(f (x0 ))
= g(y) − g(y0 )
= ψ(y)(y − y0 )
= ψ(f (x))(f (x) − f (x0 ))
= ψ(f (x))ϕ(x)(x − x0 )
= ψ(f (x)) ϕ(x) (x − x0 )
{z
}
|
=ω(x)
La funzione ω(x) = ψ(f (x)) ϕ(x) è continua in x0 (perché prodotto di funzioni continue). Quindi
g(f (x)) è derivabile (secondo Carathéodory) e
(g ◦ f )0 (x0 )
= ω(x0 )
= ψ(f (x0 )) ϕ(x0 )
= ψ(y0 ) ϕ(x0 )
= g 0 (y0 ) · f 0 (x0 )
come si voleva dimostrare.
2.4
Q.E.D.
Derivata della funzione inversa
Teorema 2.5 (Derivata della funzione inversa). Sia f una funzione reale definita su un intervallo I
e invertibile. Supponiamo f derivabile in un punto x0 ∈ I e f 0 (x0 ) 6= 0. Allora la funzione inversa
f −1 è derivabile nel punto y0 = f (x0 ) e si ha
(f −1 )0 (y0 ) =
1
f 0 (x0 )
(2.11)
Pag. 10
Introduzione al calcolo differenziale
Federico Lastaria, Analisi e Geometria 1
Dimostrazione. Poniamo x = f −1 (y). Scriviamo il rapporto incrementale di f −1 , a partire a y0 , come
f −1 (y) − f −1 (y0 )
x − x0
1
=
=
y − y0
f (x) − f (x0 )
f (x) − f (x0 ) /(x − x0 )
Ora si ricordi che se una funzione f è continua su un intervallo e continua, anche la sua inversa f −1
1
è continua. Quindi, se y tende a y0 , x tende a x0 , e allora il limite a secondo membro tende a f 0 (x
.
0)
Q.E.D.
2.5
Derivata della funzione reciproca
1
f
Teorema 2.6 (Derivata della funzione reciproca). Sia f una funzione reale definita in un intorno di
un punto x (fissato) in R, derivabile in x e diversa da zero in x. Allora la funzione 1/f è derivabile
in x e si ha:
f 0 (x)
1
= −
(2.12)
D
2
f (x)
f (x)
Osserviamo anzitutto che f , per ipotesi derivabile nel punto x, deve essere continua in x. Quindi,
essendo f (x) 6= 0, la funzione f si mantiene diversa da zero in tutto un intorno di x. (Ad esempio,
se f (x) > 0, esiste un intorno di x in cui f è positiva). Ne segue che la funzione 1/f è definita in un
intorno di x, (perché il denominatore in quell’intorno si mantiene diverso da zero).
Dimostrazione. Il rapporto incrementale (rispetto al fissato punto x) si scrive:
1
1
1
1 f (x) − f (x + h)
−
= ·
h f (x + h) f (x)
h
f (x)f (x + h)
1
· (f (x) − f (x + h)) tende a −f 0 (x), mentre il denominatore tende
h
f 0 (x)
a f (x)2 . Quindi il rapporto incrementale tende a − Q.E.D.
2 .
f (x)
Quando h tende a zero, il termine
2.6
Derivata del quoziente
Teorema 2.7 (Derivata del quoziente). Siano f (x) e g(x) due funzioni derivabili, con g(x) 6= 0.
Allora il rapporto f (x)/g(x) è derivabile e si ha:
D
Dimostrazione. Basta notare che
f 0 (x)g(x) − f (x)g 0 (x)
f (x)
=
2
g(x)
g(x)
(2.13)
1
f (x)
= f (x) ·
e usare la regola di Leibniz del prodotto e la
g(x)
g(x)
Pag. 11
Introduzione al calcolo differenziale
Federico Lastaria, Analisi e Geometria 1
regola 2.13:
f (x)
D
g(x)
2.7
= D f (x) ·
1
g(x)
1
1
= f 0 (x) ·
+ f (x) · D
g(x)
g(x)
0
1
g
(x)
= f 0 (x) ·
− f (x) ·
g(x)
[g(x)]2
0
0
f (x)g(x) − f (x)g (x)
=
2
g(x)
Derivata di xn , n ∈ N
Teorema 2.8 (Derivata di xn , n ∈ N). La derivata di xn , n ∈ N, è
Dxn = nxn−1
(2.14)
Dimostrazione. Fissiamo un x in R. Se h è un qualunque incremento, il rapporto incrementale è dato
(per lo sviluppo del binomio di Newton) da:
n n−1
n n−2 2
n n
1 n
1 n
n
· (x + h) − x
=
· x +
x
h+
x
h + ··· +
h − xn
1
2
n
h
h
1 n n−1
n n−2 2
n n
=
·
x
h+
x
h + ··· +
h
h
1
2
n
n n−2
n n−1 1
· h · nxn−1 +
x
h + ··· +
h
=
h
2
n
n n−2
n n−1 = nxn−1 +
x
h + ··· +
h
2
n
Quando h tende a zero, l’espressione contenuta nell’ultima parentesi quadra tende a nxn−1 . Q.E.D.
La derivata di xn , n intero positivo, si puøanche calcolare in un altro modo. Supponiamo di avere
già verificato che Dx = 1. Allora, per la regola di Leibniz,
Dx2
=
D(x · x)
=
(Dx) · x + x · (Dx)
=
1 · x + x · 1 = 2x
Analogamente, per ogni n, si ha:
Dxn
= D(x · · · x)
=
(Dx) · x · · · x + x · (Dx) · · · x + · · · + x · x · · · x · (Dx)
=
1 · x···x + x · 1 · x···x + ··· + x · x···1 =
= xn−1 + xn−1 + · · · + xn−1 = nxn−1
In modo più formale, l’uguaglianza Dxn = nxn−1 si dimostra per induzione su n.
2.8
Alcuni limiti importanti
Ricordiamo alcuni fatti che riguardano la costante e di Napier. La ragione per cui si preferisce scegliere
il numero e come base per la funzione esponenziale e come base per la funzione logaritmo sta nel fatto
Pag. 12
Introduzione al calcolo differenziale
Federico Lastaria, Analisi e Geometria 1
che, con tale scelta, si ha, come vedremo più avanti,
Dex = ex ,
D ln(x) =
1
x
(In genere, useremo il simbolo ln per denotare il logaritmo “naturale”, ossia in base e. Se necessario
per evitare equivoci, scriveremo anche loge ). Se invece si sceglie una base a qualunque (purché positiva
e diversa da 1), dimostreremo che valgono le regole di derivazione più complicate:
Dax = ax · ln a,
D loga (x) =
1
· loga e
x
Ricordiamo anzitutto che abbiamo definito il numero e come il limite della successione (1 + 1/n)n :
e = lim
n→+∞
1+
1 n
n
(2.15)
Insistiamo sul fatto che l’uguaglianza appena scritta non è un teorema, ma una definizione. Più
precisamente, si dimostra che la successione (1+1/n)n è crescente e limitata; quindi, per la completezza
di R, converge a un numero reale. Tale numero reale, per definizione, è chiamato e. Inoltre si dimostra
senza difficoltà (ma non riportiamo la dimostrazione) che si ha anche:
lim
x→+∞
1+
1 x
=e
x
(2.16)
1 x
=e
x
Di conseguenza, ponendo 1/x = y, ricaviamo l’importante limite
lim
n→−∞
1+
lim 1 + y
y→0
y1
(2.17)
=e
(2.18)
che sarà fondamentale per le nostre considerazioni.
Possiamo allora dimostrare che valgono alcuni limiti fondamentali:
Teorema 2.9. Per ogni base a (positiva e diversa da 1), si ha
lim
y→0
1
loga (1 + y)
= loga e =
y
loge a
(2.19)
ln(1 + y)
=1
y
(2.20)
In particolare, se a = e,
lim
y→0
Dimostrazione.
loga (1 + y)
y→0
y
lim
1
lim loga (1 + y) y
(Proprietà dei logaritmi: loga bc = c loga b).
=
1
loga lim (1 + y) y
(Perché la funzione loga è continua).
=
loga e
1
loge a
=
=
(L’uguaglianza loga b =
y→0
y→0
(Per il limite 2.18).
(Proprietà dei logaritmi: loga b =
1
).
logb a
1
segue dall’ovvia equivalenza
logb a
aw = b ⇐⇒ a = b1/w
Pag. 13
Introduzione al calcolo differenziale
Federico Lastaria, Analisi e Geometria 1
1
Infatti, per la definizione di logaritmo, tale equivalenza si legge: w = loga b se e solo se
= logb a).
w
In particolare, se a = e, si ha loga e = loge e = 1, e quindi si ricava l’uguaglianza 2.20:
lim
y→0
ln(1 + y)
=1
y
(2.21)
Q.E.D.
Teorema 2.10. Per ogni base a (positiva e diversa da 1), si ha
ax − 1
= loge a
x→0
x
(2.22)
ex − 1
=1
x→0
x
(2.23)
lim
In particolare, se a = e, si ha
lim
Dimostrazione. Per ricondurci al precedente limite 2.19, operiamo il cambio di variabili ax − 1 = y,
da cui si ricava x = loga (1+y). Quando x tende a zero, anche y tende a zero. Allora, tenendo presente
il limite 2.19, si ha:
ax − 1
x→0
x
lim
=
=
y
y→0 loga (1 + y)
loge a
lim
Q.E.D.
2.9
Derivata di exp e log
Teorema 2.11 (Derivata del logaritmo). La derivata di ln x (logaritmo naturale, in base e) è
D ln x =
1
x
(2.24)
La derivata del logaritmo loga (x) in base arbitraria è
D loga x =
1
· loga e
x
(2.25)
Dimostrazione. Per mettere meglio in evidenza il ruolo del numero e, calcoliamo dapprima la derivata
Pag. 14
Introduzione al calcolo differenziale
Federico Lastaria, Analisi e Geometria 1
della funzione loga (x) con una base arbitraria (a 6= 1, a > 0):
loga x(1 + h/x) − loga (x)
loga (x + h) − loga (x)
lim
= lim
h→0
h→0
h
h
loga (x) + loga (1 + h/x) − loga (x)
= lim
h→0
h
loga (1 + h/x)
= lim
h→0
h
1 loga (1 + h/x)
= lim
h→0 x
h/x
1
loga (1 + h/x)
=
· lim
x h→0
h/x
1
loga (1 + y)
=
· lim
(Si è posto h/x = y).
x y→0
y
1
=
· lim log (1 + y)1/y
x y→0 a
1
(Per la continuità di loga ).
· loga lim (1 + y)1/y
=
y→0
x
È a questo punto che si impone all’attenzione il numero definito dal limite
lim (1 + y)1/y
y→0
Abbiamo già visto che tale limite esiste ed è chiamato e. Allora, dall’ultima uguaglianza scritta, segue
la tesi 2.25
1
D loga (x) = · loga e
x
Se poi scegliamo come base dei logaritmi proprio il numero a = e, si ha loga e = loge e = 1, e quindi
D loge (x) =
1
x
Q.E.D.
Teorema 2.12 (Derivata dell’esponenziale). La derivata dell’esponenziale ex è
Dex = ex
(2.26)
Dax = ax · ln a
(2.27)
La derivata di ax è
Dimostrazione. Calcoliamo la derivata di ex , in un generico punto fissato x in R, come limite del
rapporto incrementale:
ex+h − ex
h→0
h
lim
=
=
=
=
ex eh − ex
h→0
h
h
e
−1
lim ex
h→0
h
h
e
−1
ex lim
h→0
h
ex · 1
lim
= e
(Per il limite 2.23)
x
Pag. 15
Introduzione al calcolo differenziale
Federico Lastaria, Analisi e Geometria 1
Esattamente nello stesso modo, usando il limite 2.22, si dimostra che Dax = ax · loge a:
ax+h − ax
h→0
h
lim
ax ah − ax
h→0
h
h
a
−1
= lim ax
h→0
h
ah − 1
x
= a lim
h→0
h
= ax · loge a
=
lim
(Per il limite 2.22)
Naturalmente, si puødimostrare Dex = ex vedendo la funzione ex come l’inversa di ln(x) e usando il
teorema della derivazione della funzione inversa. Posto exp(x) = y, x = ln(y), si ha
1
(ln)0 (y)
1
=
1/y
= y
(exp)0 (x)
=
=
exp(x)
Q.E.D.
2.10
Derivata di xα , (α ∈ R, x > 0)
La funzione xα , con α numero reale arbitrario, è definita per x > 0. La sua derivata è α · xα−1 :
Teorema 2.13. La derivata di xα , (α ∈ R, x > 0) è
Dxα = αxα−1
α
Dimostrazione. Basta scrivere xα come eln(x
della funzione composta:
Dxα
)
(2.28)
e usare le regole di derivazione dell’esponenziale e
α
=
Deln(x
)
=
Deα ln(x)
=
eα ln(x) · α ·
=
xα · α ·
=
αxα−1
1
x
1
x
Q.E.D.
2.11
Derivata di sin x e cos x
Per calcolare la derivata di sin x dobbiamo ricordare che vale il seguente limite fondamentale:
lim
x→0
sin x
=1
x
(2.29)
Pag. 16
Introduzione al calcolo differenziale
Federico Lastaria, Analisi e Geometria 1
Da tale limite si ricava:
lim
h→0
cos h − 1
=0
h
(2.30)
Infatti,
cos h − 1
=
h
=
=
(cos h − 1)(cos h + 1)
h(cos h + 1)
2
cos h − 1
h(cos h + 1)
sin2 h
h(cos h + 1)
sin h
sin h
= −
·
h
cos h + 1
= −
che tende a zero, perché
sin h
sin h
→1e
→ 0.
h
cos h + 1
Teorema 2.14.
D sin x = cos x
(2.31)
D cos x = − sin x
(2.32)
e
Dimostrazione. Scriviamo il rapporto incrementale e usiamo le formule di addizione del seno:
sin(x + h) − sin x
h
=
=
Quando h tende a zero,
cos x.
cos h−1
h
tende a 0 e
1 · sin x cos h + cos x sin h − sin x
h
cos h − 1
sin h
sin x
+ cos x
h
h
sin h
h
tende a 1. Quindi il rapporto incrementale tende a
Con un conto analogo, usando le formule di addizione del coseno, si dimostra che D cos x = sin x:
cos(x + h) − cos x
h
=
=
1 · cos x cos h − sin x sin h − cos x
h
cos h − 1
sin h
cos x
− sin x
h
h
da cui segue che il limite del rapporto incrementale è − sin x. Oppure, si puøosservare che
π
cos x = sin( − x)
2
e usare la regola della derivata di funzione composta:
D cos x
π
− x)
2
π
= (−1) · cos( − x)
2
= − sin x
= D sin(
Q.E.D.
Pag. 17
Introduzione al calcolo differenziale
2.12
Federico Lastaria, Analisi e Geometria 1
Il differenziale. Approssimazione al primo ordine.
f
Definizione 2.15. Sia I −→ R (I ⊂ R) una funzione derivabile in un punto x0 ∈ I. Si chiama
differenziale di f in x0 , e si denota dfx0 , l’applicazione lineare
dfx
h 7−→ dfx0 (h) = f 0 (x0 ) · h
R −→0 R,
(2.33)
Interpretazione geometrica del differenziale. dfx0 (h)(= f 0 (x0 )·h) è la variazione dell’ordinata,
corrispondente all’incremento h dell’ascissa, letta sulla retta tangente (e non sul grafico).
Se f è una funzione derivabile su tutto un intervallo I ⊂ R, si chiama differenziale di f , e si denota
df , la funzione lineare che a ogni punto x ∈ I associa il differenziale dfx nel punto x. Dunque il
differenziale df deve essere visto come una funzione di due variabili:
df
I × R −→ R,
(x, h) 7−→ dfx (h)
(2.34)
(df )
Esempio. 1) Il differenziale di f (x) = ex nel punto x0 = 0 è la funzione lineare R −→0 R, che a
ogni h ∈ R associa (df )0 (h) = f 0 (0)h = 1.h = h.
Un problema cruciale è approssimare il valore f (x0 + h), per h piccolo, vicino a un punto x0 in cui
f sia derivabile. Vedremo che ci sono tante possibili approssimazioni di una funzione in un intorno
di un punto: approssimazioni al primo ordine, al secondo ordine, al terzo ordine eccetera, a seconda
della regolarità della funzione f . Con la derivata prima, possiamo definire l’approssimazione al primo
ordine.
Sappiamo che si ha:
f (x0 + h) = f (x0 ) + f 0 (x0 ) h + o(h)
(2.35)
La approssimazione al primo ordine, o approssimazione lineare, di f in x0 si ottiene trascurando
il termine o(h) e prendendo in considerazione, come valore approssimato di f (x0 + h), soltanto la
somma di f (x0 ) con il differenziale dfx0 (h) = f 0 (x0 ) h. Dunque:
L’approssimazione al primo ordine di f (x0 + h) è
f (x0 ) + f 0 (x0 ) h
(h piccolo)
(2.36)
ovvero, in modo equivalente, l’approssimazione al primo ordine di f (x), vicino a x0 , è
f (x0 ) + f 0 (x0 ) (x − x0 )
(x vicino a x0 ).
(2.37)
L’equazione della retta tangente al grafico di f (x) nel punto (x0 , f (x0 )) è
y = f (x0 ) + f 0 (x0 ) (x − x0 )
(2.38)
Dunque, dalla 2.37 segue che approssimare al primo ordine (o in modo lineare) una funzione f (x) in
un intorno di x0 significa confondere, vicino a x0 , il grafico di f (x) con la retta tangente nel punto di
coordinate (x0 , f (x0 )).
Pag. 18
Introduzione al calcolo differenziale
Federico Lastaria, Analisi e Geometria 1
Ad esempio, l’approssimazione lineare di sin x vicino a x0 = 0 è x. Infatti, sappiamo che
lim
x→0
Questo significa che
sin x
x
sin x
=1
x
− 1 = α(x) è una funzione che tende a zero per x → 0. Dunque
sin x = x + x α(x),
con limx→0 α(x) = 0
Ricordando che sin 0 = 0, possiamo dedurre che la derivata di sin x in x0 = 0 è uguale a 1 e che
l’approssimazione lineare di sin x vicino a x0 = 0 è x. Interpretazione geometrica: vicino all’origine,
il grafico di sin x si confonde (al primo ordine) con la retta tangente (che è la bisettrice del primo e
del terzo quadrante).
3
Nota storica. Fluenti e flussioni
“Fluentium quantitatum momenta (i.e., earum partes indefinite parvae, quarum additamento per singula temporis indefinita parva spatia augentur) sunt ut fluendi celeritates.
Quare si cuiusvis ut x momentum per factum ex ejus celeritate m et infinite parva quantitate o (i.e. per mo) designetur, caeterorum v, y, z momenta per lo, no, ro designabuntur,
siquidem lo, mo, no e ro sunt inter se ut l, m, n e r.
Jam cum quantitatum fluentium (ut x et y) momenta (ut mo et no) sint additamenta infinite parva quibus illae quantitates per singula temporis infinite parva intervalla augentur,
sequitur quod quantitates illae x et y post quodlibet infinite parvum temporis intervallum
futurae sunt x + mo et y + no”.
Isaac Newton, Tractatus de Methodis Serierum et Fluxionum, 1671. D.T. Whiteside,
The Mathematical Papers of Isaac Newton (Cambridge University Press), III, p. 79-81.
(I momenti delle quantità fluenti (vale a dire, le loro parti infinitamente piccole, per aggiunta
delle quali esse si accrescono in singoli spazi infinitamente piccoli di tempo), sono come le velocità
di flusso. Per questa ragione, se il momento di una qualunque di esse, diciamo x, è espressa dal
prodotto della sua velocità ẋ e di una quantità infinitamente piccola o (vale a dire, è espressa
da ẋo), i momenti delle altre, v, y, z[...], saranno espresse da v̇o, ẏo, żo, [...], in modo tale che
v̇o, ẋo, ẏo, żo siano negli stessi rapporti di v̇, ẋ, ẏ, ż.
Poiché i momenti (come ẋo, ẏo) delle quantità fluenti (come x e y) sono gli incrementi infinitamente piccoli di cui queste quantità si accrescono in singoli intervalli di tempo infinitamente
piccoli, ne segue che dopo un intervallo di tempo infinitamente piccolo queste quantità diventeranno x + ẋo e y + ẏo).
Nel De Methodis Serierum et Fluxionum4 Newton esplicita che le quantità alle quali si applica il
suo metodo analitico sono quantità geometriche generate da un processo di flusso nel tempo.5 Ad
esempio, il movimento nel tempo di un punto genera una linea, e il movimento continuo di una linea
genera una superficie.
Nel linguaggio di Newton, le quantità generate dal flusso sono dette fluenti. Le velocità istantanee
sono dette flussioni e verranno indicate (ma solo dopo il 1690) con il punto: ẋ, ẏ eccetera. I momenti
delle quantità fluenti sono “le loro parti infinitamente piccole, per aggiunta delle quali esse si accrescono
in singoli spazi infinitamente piccoli di tempo”. I momenti sono denotati da Newton inizialmente con
notazioni poco pratiche e poco espressive: i momenti delle quantità fluenti x, v, y.. sono denotati6
4 Redatto
in latino nel 1671, sarà pubblicato soltanto nel 1737 in Inghilterra e nel 1740 in Francia.
Guicciardini, Isaac Newton on Mathematical Certainty and Method, MIT Press, 2009.
6 Nella traduzione in italiano, i momenti sono stati denotati come ẋo, ẏo eccetera.
5 N.
Pag. 19
Introduzione al calcolo differenziale
Federico Lastaria, Analisi e Geometria 1
rispettivamente con mo, lo, no. (Si veda il testo latino). Dopo il 1690 questi momenti verranno
denotati, rispettivamente, con le notazioni più significative ẋo, ẋo, ẋo. Dunque, dopo un intervallo di
tempo infinitamente piccolo, la quantità fluente x diventerà quindi x + ẋo. (Noi oggi scriveremmo che
il valore di una quantità x in un istante t + h molto vicino a t è x(t + h) = x(t) + ẋ(t)h + o(h). Si
badi che il nostro simbolo di o-piccolo non ha il significato che aveva in Newton). Si noti che Newton
scrive che i momenti sono “come le velocità di flusso”(“ut fluendi celeritates”). L’idea è che, in un
intervallo di tempo infinitamente piccolo, la flussione rimane costante (la velocità media coincide con
la velocità istantanea) e quindi il momento è proporzionale alla flussione (alla velocità istantanea).
In stile newtoniano7 , la regola della derivata del prodotto si potrebbe giustificare nel modo seguente.
Siano x e y due quantità fluenti. Al tempo t + o (dove o è un intervallino di tempo infinitamente
piccolo) la fluente prodotto z = xy diventa:
z(t + o) = z + żo = (x + ẋo)(y + ẏo) = z + (ẋy + xẏ)o + ẋẏo2
Possiamo allora scrivere
żo = (ẋy + xẏ)o + ẋẏo2
Di qui, dividendo per o e trascurando il termine “infinitamente piccolo” ẋẏo2 , si ottiene il risultato
cercato ż = ẋy + xẏ.
7 Roger
Godement, Analyse Mathématique I, Springer, 2ème édition corrigée, 1998, pag. 267.
Pag. 20
Introduzione al calcolo differenziale
Federico Lastaria, Analisi e Geometria 1
4
Funzioni derivabili su un intervallo
4.1
Punti di massimo o minimo locale per una funzione
f
Definizione 4.1. Sia D −→ R una funzione definita su un sottoinsieme D ⊂ R.
1. Un punto x0 in D è punto di massimo locale per f , e il valore f (x0 ) si chiama un massimo
locale per f , se esiste un intorno I di x0 tale che per ogni x ∈ I ∩ D si abbia
f (x0 ) ≥ f (x)
(4.1)
Se la disuguaglianza (4.1) vale con il simbolo > di maggiore in senso stretto per ogni x 6= x0 , si
dice che x0 è punto di massimo locale stretto.
2. Un punto x0 in D è un punto di minimo locale per f , e il valore f (x0 ) si chiama un minimo
locale per f , se esiste un intorno I di x0 tale che per ogni x ∈ I ∩ D si abbia
f (x0 ) ≤ f (x)
(4.2)
Se la disuguaglianza (4.2) vale con il simbolo < di minore in senso stretto per ogni x 6= x0 , si
dice che x0 è punto di minimo locale stretto.
Osservazione. Si noti che la definizione di punto di massimo (o di minimo) per una funzione f
non richiede affatto che la funzione f sia derivabile.
4.2
Teorema di Fermat
Ricordiamo due definizioni.
Definizione 4.2. Diremo che un punto x0 , appartenente a un insieme D ⊂ R, è un punto interno a
D se esiste un intorno I(x0 ; r) = (x0 − r, x0 + r), di raggio r > 0, incluso in D:
I(x0 ; r) ⊂ D
In altri termini, x0 interno a D significa che tutti i punti di R sufficientemente vicini a x0 appartengono anch’essi a D.
Si noti che “x0 è interno a D” è condizione più forte di “x0 appartiene a D” (cioè, x ∈ D). Infatti,
se x0 è interno a D, allora appartiene a D; ma se x0 appartiene a D, non è detto che sia interno a D.
Ad esempio, il punto x0 = 0 appartiene all’intervallo D = [0, 1], ma non è interno a tale intervallo.
Definizione 4.3. Un punto x0 , interno al dominio di una funzione f , si dice punto critico di f o
punto stazionario di f , se f è derivabile in x0 e
f 0 (x0 ) = 0
Pag. 21
Introduzione al calcolo differenziale
Federico Lastaria, Analisi e Geometria 1
f
Teorema 4.4 (Fermat). Sia D −→ R una funzione a valori reali definita su un insieme D ⊂ R.
Supponiamo che:
1. x0 sia un punto di massimo (o di minimo) locale per f ;
2. x0 sia interno a D;
3. f sia derivabile in x0 .
Allora x0 è un punto stazionario di f , cioè f 0 (x0 ) = 0.
Dimostrazione. Per fissare le idee, supponiamo che x0 sia un punto di massimo locale per f . Poiché,
per ipotesi, x0 è al tempo stesso un punto interno al dominio D di f e un punto di massimo locale,
esiste un intorno sufficientemente piccolo I di x0 con le due proprietà seguenti8 :
I⊂D
(4.3)
(perché x0 è interno a D) e
∀x ∈ I
f (x) − f (x0 ) ≤ 0
(4.4)
(perché x0 è punto di massimo locale). Per ogni x ∈ I, x 6= x0 , si ha allora
se x > x0 e
f (x) − f (x0 )
≤0
x − x0
(4.5)
f (x) − f (x0 )
≥0
x − x0
(4.6)
se x < x0 . Passando al limite per x che tende a x0 , si ricava9 rispettivamente f 0 (x0 ) ≤ 0 e f 0 (x0 ) ≥ 0.
Di conseguenza f 0 (x0 ) = 0.
Si noti che nel teorema dimostrato è ovviamente essenziale l’ipotesi che x0 sia interno a D. (Non
basta che il punto x0 appartenga a D). Ad esempio, la funzione f (x) = x nell’intervallo D = [0, 1] ha
un punto di massimo locale in x0 = 1, anche se la derivata (sinistra) di f in x0 non è nulla (è uguale
a 1). Naturalmente questo non contaddice il teorema di Fermat. Semplicemente non sono soddisfatte
le ipotesi di tale teorema, perché il punto x0 = 1 non è interno a D = [0, 1].
8 Sappiamo che esiste un intorno U di x che soddisfa la condizione U ⊂ D e esiste un intorno V di x su cui vale
0
0
f (x) ≤ f (x0 ). Allora sull’intersezione I = U ∩ V (che è ancora un intorno di x0 ) sono soddisfatte entrambe le condizioni.
9 Qui si usa il cosiddetto teorema di permanenza del segno:
Sia g una funzione definita su un intorno U di un punto x0 (con la possibile eccezione del punto x0 ). Supponiamo
che, per ogni x ∈ U \ x0 , si abbia g(x) ≥ 0 e supponiamo che esista (finito) il limite limx→x0 g(x) = L. Allora si ha
L ≥ 0.
Questo teorema è del tutto evidente, se si pensa alla definizione di limite. La dimostrazione è semplice. Supponiamo,
per assurdo, che sia L < 0. Prendiamo un ε > 0 abbastanza piccolo, in modo tale che l’intervallino J = (L − ε, L + ε) sia
tutto contenuto nella semiretta negativa. (Ossia prendiamo L + ε < 0). Per definizione di limite, esiste un intorno W di
x0 tale che per ogni x ∈ W \ x0 , si ha g(x) ∈ J, quindi g(x) < 0. Ma allora, per ogni x (diverso da x0 ) dell’intervallino
non vuoto U ∩ W si deve avere g(x) ≥ 0 (per ipotesi) e al tempo stesso g(x) < 0. Assurdo.
Pag. 22
Introduzione al calcolo differenziale
4.3
Federico Lastaria, Analisi e Geometria 1
Teorema di Rolle
f
Teorema 4.5 (Rolle, 1690). 10 Sia [a, b] −→ R una funzione continua sull’intervallo compatto [a, b] e
derivabile sull’intervallo aperto (a, b). Supponiamo
f (a) = f (b)
(4.7)
Allora esiste (almeno) un punto γ ∈ (a, b) in cui la derivata di f si annulla:
f 0 (γ) = 0
(4.8)
Dimostrazione. Per il teorema di Weierstrass la funzione f , continua sul compatto [a, b], assume il suo
valore massimo M e il suo valore minimo m. Questo significa che esiste (almeno) un punto xM ∈ [a, b]
ed esiste (almeno) un punto xm ∈ [a, b] tali che f (xM ) = M e f (xm ) = m. Sono possibili due casi.
1. Sia xM che xm cadono negli estremi di [a, b]. In tale caso, per l’ipotesi f (a) = f (b), si ha M = m.
Ma allora f è costante, e quindi f 0 (x) = 0 in ogni punto x di (a, b).
2. Almeno uno dei due punti xm , xM è interno ad [a, b]. Allora, per il teorema di Fermat, in un
tale punto la derivata si annulla .
Dunque, in ogni caso esiste (almeno) un punto γ nell’intervallo aperto (a, b) in cui la derivata si
annulla.
4.4
Teorema di Lagrange (o del valore medio, o degli incrementi finiti)
f
Teorema 4.6 (del valore medio, o di Lagrange). Sia [a, b] −→ R una funzione continua sull’intervallo
compatto [a, b] e derivabile sull’intervallo aperto (a, b). Allora esiste un punto γ ∈ (a, b) per il quale
si ha
f (b) − f (a) = f 0 (γ)(b − a)
(4.9)
Dimostrazione. Si consideri la funzione
g(x) = f (x) − f (a) −
f (b) − f (a)
(x − a)
b−a
(4.10)
definita sull’intervallo [a, b]. Tale funzione è continua su [a, b], derivabile su (a, b) e assume lo stesso
valore agli estremi:
g(a) = g(b) = 0
Quindi g soddisfa le ipotesi del teorema di Rolle. Per tale teorema, esiste un punto γ in (a, b) in cui
g 0 (γ) = 0. La derivata di g(x) è
f (b) − f (a)
g 0 (x) = f 0 (x) −
b−a
Quindi si ha
f (b) − f (a)
0 = g 0 (γ) = f 0 (γ) −
b−a
che equivale a
f (b) − f (a) = f 0 (γ)(b − a)
10 Michel
Rolle (1652-1719), matematico francese.
Pag. 23
Introduzione al calcolo differenziale
Federico Lastaria, Analisi e Geometria 1
Osservazione. Il teorema di Lagrange ha la seguente interpretazione geometrica. Si noti che il
(a)
numero f (b)−f
è il coefficiente angolare della retta che passa per (a, f (a)) e (b, f (b)), di equazione
b−a
y = f (a) +
f (b) − f (a)
(x − a)
b−a
(4.11)
Quindi il teorema afferma che esiste almeno un punto (γ, f (γ)) appartenente al grafico della funzione
f in cui la retta tangente (il cui coefficiente angolare è f 0 (γ)) è parallela alla retta che unisce i due
punti estremi (a, f (a)) e (b, f (b)). Si noti che la funzione ausiliaria (4.10) è la differenza tra l’ordinata
(a)
del punto (x, f (x)) sul grafico di f e l’ordinata del punto (x, f (a)+ f (b)−f
(x−a)) sulla retta secante.
b−a
4.5
Teorema di Cauchy (o degli incrementi finiti)
Teorema 4.7 (Cauchy, o degli inrementi finiti, o del valore medio). Siano f e g due funzioni continue
sull’intervallo compatto [a, b] e derivabili sull’intervallo aperto (a, b). Supponiamo g 0 (x) 6= 0 per ogni
x in (a, b). Allora esiste (almeno) un punto γ ∈ (a, b) per il quale
f (b) − f (a)
f 0 (γ)
= 0
g(b) − g(a)
g (γ)
(4.12)
Prima dimostrazione. Si consideri la funzione
ϕ(x) = [g(b) − g(a)]f (x) − [f (b) − f (a)]g(x)
(4.13)
Si vede facilmente che tale funzione soddisfa, sull’intervallo [a, b], tutte le ipotesi del teorema di Rolle.
Infatti è continua su [a, b] e derivabile su (a, b) (perhé tali sono f e g). Inoltre, ϕ(a) = ϕ(b):
ϕ(a)
=
[g(b) − g(a)]f (a) − [f (b) − f (a)]g(a) = g(b)f (a) − f (b)g(a)
ϕ(b)
=
[g(b) − g(a)]f (b) − [f (b) − f (a)]g(b) = −f (b)g(a) + g(b)f (a)
Dunque, per il teorema di Rolle, esiste un punto γ in (a, b) in cui ϕ0 (γ) = 0. Poiché
ϕ0 (x) = [g(b) − g(a)]f 0 (x) − [f (b) − f (a)]g 0 (x)
in tale punto γ si ha
0 = ϕ0 (γ) = [g(b) − g(a)]f 0 (γ) − [f (b) − f (a)]g 0 (γ)
che equivale a 4.12. (Si noti che si ha g(b) − g(a) 6= 0. Infatti, se fosse g(a) = g(b), per il teorema di
Rolle, g 0 si annullerebbe in un punto di (a, b), contro l’ipotesi).
Seconda dimostrazione.
Pag. 24
Introduzione al calcolo differenziale
Federico Lastaria, Analisi e Geometria 1
(f 0 (γ), −g 0 (γ)) = w(γ)
~
(g 0 (γ), f 0 (γ)) = r~0 (γ)
~r(b)
− ~r(
a)
B = ~r(b)
~r(a) = A
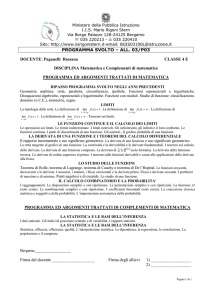
Figure 1: Interpretazione geometrica del teorema di Cauchy. Data una curva piana parametrizzata [a, b] −→
R2 , t 7−→ ~r(t) = (g(t), f (t)), esiste almeno un γ ∈ (a, b) tale che il vettore velocità r~0 (γ) = (g 0 (γ), f 0 (γ)) sia
parallelo alla corda AB che congiunge i punti estremi.
Una interpretazione geometrica del teorema di Cauchy è la seguente11 :
Se una curva piana è dotata ovunque di retta tangente tra due suoi punti A e B, allora almeno una
di queste rette tangenti è parallela alla corda AB.
Questa proprietà vale non soltanto quando la curva è il grafico di una funzione, ma anche per curve
più in generali, come quella della figura di sopra.
Ora dimostriamo il teorema di Cauchy, ispirandoci al suo significato geometrico. Siano f (t), g(t), t ∈
[a, b], due funzioni soddisfacenti le ipotesi del teorema di Cauchy. Si consideri la curva parametrizzata
t 7−→ ~r(t) = (g(t), f (t)),
t ∈ [a, b]
Tale curva è una funzione, il cui dominio è [a, b] e il cui codominio è il piano R2 . Nella figura,
l’immagine di tale funzione è la linea disegnata in rosso. (Attenzione: la linea rossa è l’immagine della
curva, non il suo grafico).
Il vettore tangente all’istante t ∈ (a, b) (con linguaggio cinematico, il vettore velocità istantanea
all’istante t) è r~0 (t) = (g 0 (t), f 0 (t)).
Vogliamo dimostrare che esiste un γ ∈ (a, b) in corrispondenza del quale il vettore tangente r~0 (t) =
0
(g (t), f 0 (t)) è parallelo a ~r(b) − ~r(a). In modo equivalente, dimostriamo che esiste un γ ∈ (a, b) per il
quale il vettore (f 0 (γ), −g 0 (γ)) - che è ortogonale a (g 0 (t), f 0 (t)) - è ortogonale a ~r(b) − ~r(a). Questo
equivale a dimostrare che esiste un γ ∈ (a, b) per il quale il loro prodotto scalare è nullo12 :
(f 0 (γ), −g 0 (γ)) · (~r(b) − ~r(a))
= (f 0 (γ), −g 0 (γ)) · (g(b) − g(a), f (b) − f (a))
= f 0 (γ)[g(b) − g(a)] − g 0 (γ)[f (b) − f (a)]
(4.14)
(4.15)
=
(4.16)
0
L’espressione a primo membro di 4.14 è il valore, per t = γ, della derivata della funzione
ϕ(t)
=
(f (t), −g(t)) · (~r(b) − ~r(a))
=
f (t)[g(b) − g(a)] − g(t)[f (b) − f (a)]
11 Tom
Apostol, Calculus, vol. 1, Blaisdell Publishing Company.
ricordi che due vettori ~
x = (x1 , x2 ), ~
y = (y1 , y2 ) ∈ R2 sono ortogonali se e solo se il loro prodotto scalare è nullo:
v~1 · v~2 = x1 y1 + x2 y2 = 0.
12 Si
Pag. 25
Introduzione al calcolo differenziale
Federico Lastaria, Analisi e Geometria 1
Tale funzione ϕ(t) soddisfa le ipotesi del teorema di Rolle (È la stessa funzione ausiliaria 4.13 che
abbiamo considerato nella precedente dimostrazione dello stesso terema). Dunque, per il teorema di
Rolle, esiste un γ ∈ (a, b) per il quale
0 = ϕ0 (γ) = [g(b) − g(a)]f 0 (γ) − [f (b) − f (a)]g 0 (γ)
Quest’ultima uguaglianza equivale13 all’uguaglianza 4.12. Quindi il teorema di Cauchy è dimostrato.
Osservazione sul teorema di Cauchy. Se pensiamo alla curva parametrizzata
t 7−→ ~r(t) = (g(t), f (t))
come al moto di una particella nel piano, allora (g 0 (t), f 0 (t)) è il vettore velocità. Il teorema di Cauchy
afferma allora che esiste almeno un istante in cui il vettore velocità è parallelo al vettore spostamento
~r(b) − ~r(a). Si osservi perøche questo è vero solo nel caso di moti piani. Ad esempio, se il moto della
particella è la spirale (cos t, sin t, t), il suo vettore velocità (− sin t, cos t, 1) non è verticale, mentre il
vettore spostamento puøessere verticale (Basta prendere il punto di partenza e quello di arrivo sulla
stessa verticale, compiendo un giro completo).
4.6
Funzioni con derivata nulla su un intervallo
Teorema 4.8. Una funzione definita su un intervallo aperto I = (a, b) e con derivata nulla in ogni
punto di tale intervallo è una costante.
Dimostrazione. Prendiamo due punti x1 , x2 in (a, b). Per il teorema di Lagrange, esiste un punto c,
compreso tra x1 e x2 , per il quale si ha:
f (x2 ) − f (x1 ) = f 0 (c)(x2 − x1 ) = 0 · (x2 − x1 ) = 0
Ne segue f (x1 ) = f (x2 ). Quindi f è costante.
Osservazione. Si noti che nell’ultimo teorema è essenziale l’ipotesi che il dominio della funzione
sia un intervallo (un sottoinsieme connesso di R). Ad esempio, la funzione
f
(0, 1) ∪ (2, 3) −→ R
1 se x ∈ (0, 1)
f (x) =
2 se x ∈ (2, 3)
ha derivata nulla in ogni punto del suo dominio D = (0, 1) ∪ (2, 3), ma non è costante. (Ovviamente
D non è un intervallo, cioè non è connesso).
13 Si osservi che si puødividere per g 0 (γ)[g(b) − g(a)], e ottenere in questo modo la 4.12, perché g 0 (t) non è mai nulla
(per ipotesi) e, di conseguenza, anche [g(b) − g(a)] 6= 0. Infatti, se si avesse [g(b) − g(a)] = 0, allora g 0 si annullerebbe
in almeno un punto (Teorema di Rolle).
Pag. 26
Introduzione al calcolo differenziale
4.7
Federico Lastaria, Analisi e Geometria 1
Funzioni con derivate uguali su un intervallo
Teorema 4.9. Siano f e g due funzioni reali, definite su un intervallo aperto I = (a, b), con uguale
derivata in ogni punto di I = (a, b):
f 0 (x) = g 0 (x)
∀x ∈ I
(4.17)
Allora f e g differiscono per una costante.
Dimostrazione. La funzione
ϕ(x) = f (x) − g(x)
ha derivata nulla su I:
ϕ0 (x) = f 0 (x) − g 0 (x) = 0
Dunque ϕ è una costante, diciamo c ∈ R:
ϕ(x) = f (x) − g(x) = c
Dunque f e g differiscono per una costante.
4.8
Funzioni crescenti o decrescenti
f
Definizione 4.10. Diremo che una funzione D −→ R è crescente (o crescente in senso lato) su D
(sottoinsieme qualunque di R, non necessariamente un intervallo), se, per ogni x1 , x2 ∈ D,
x1 < x2 =⇒ f (x1 ) ≤ f (x2 )
(4.18)
x1 < x2 =⇒ f (x1 ) < f (x2 )
(4.19)
Se per ogni x1 , x2 ∈ D,
diremo che f è strettamente crescente su D.
In modo analogo si definiscono le funzioni decrescenti e le funzioni strettamente decrescenti.
Diremo che le funzioni crescenti oppure decrescenti sono monotòne. Le funzioni strettamente crescenti oppure strettamente decrescenti si diranno strettamente monotòne.
Teorema 4.11. Sia I un intervallo aperto e sia f una funzione reale derivabile su I. Allora f è
crescente (in senso lato) su I se e solo se f 0 (x) ≥ 0 per ogni x ∈ I
Dimostrazione.
Prima parte. f crescente implica f 0 (x) ≥ 0 per ogni x.
Fissiamo un punto x0 ∈ I. Poiché, per ipotesi, f è crescente, il rapporto incrementale
f (x) − f (x0 )
x − x0
è sempre maggiore o uguale a zero. Quindi il limite del rapporto incrementale, quando x tende a x0 ,
resta maggiore o uguale a zero:
f 0 (x0 ) = lim
x→x0
f (x) − f (x0 )
≥0
x − x0
Pag. 27
Introduzione al calcolo differenziale
Federico Lastaria, Analisi e Geometria 1
Seconda parte. f 0 (x) ≥ 0 per ogni x implica f crescente.
Siano x1 , x2 due punti di I, con x1 < x2 . Per il teorema di Lagrange, esiste un punto c, x1 < c < x2 ,
tale che
f (x1 ) − f (x2 ) = f 0 (c)(x1 − x2 )
Poiché si ha f 0 (c) ≥ 0 e x1 − x2 < 0, abbiamo f (x1 ) − f (x2 ) ≤ 0, ossia f (x1 ) ≤ f (x2 ). Dunque f è
crescente (in senso lato) in I.
4.9
Funzioni strettamente monotòne
Teorema 4.12 (Funzioni derivabili strettamente monotòne). Sia I un intervallo aperto e sia f una
funzione reale derivabile su I.
1. Se f 0 (x) > 0 in ogni punto x ∈ I, allora f è strettamente crescente su I.
2. Se f 0 (x) < 0 in ogni punto x ∈ I, allora f è strettamente decrescente su I.
Dimostrazione. Dimostriamo il teorema per il caso di funzioni con derivata positiva in ogni punto.
(L’altro caso si tratta in modo analogo).
Siano x1 , x2 due punti di I, con x1 < x2 . Per il teorema di Lagrange esiste un punto c, compreso
tra x1 e x2 , per il quale si ha:
f (x1 ) − f (x2 ) = f 0 (c)(x1 − x2 )
Poiché per ipotesi f 0 (c) > 0 e x1 − x2 < 0, si deve avere f (x1 ) − f (x2 ) < 0. Abbiamo allora dimostrato
che, per ogni x1 , x2 ∈ I,
x1 < x2 =⇒ f (x1 ) < f (x2 )
Dunque f è strettamente crescente su I.
Osservazione. Il teorema non si inverte. Se una funzione è strettamente crescente su un intervallo
I ed è derivabile in I, allora si avrà senz’altro f 0 (x) ≥ 0 per ogni x ∈ I (per il teorema 4.11, perché
strettamente crescente implica crescente), ma in qualche punto la derivata potrebbe annullarsi. Ad
esempio, la funzione f (x) = x3 , x ∈ R, è strettamente crescente su R, ma f 0 (0) = 0.
Osservazione. L’implicazione “f 0 > 0 =⇒ f strettamente crescente” non vale se il dominio di f
non è un intervallo. Ad esempio, la funzione f (x) = −1/x, definita su D = (−∞, 0) ∪ (0, +∞) (che
non è un intervallo) ha derivata positiva su D, ma f non è strettamente crescente sul suo dominio D.
Ovviamente f è crescente sulla semiretta (−∞, 0) ed è crescente sulla semiretta (0, +∞), ma non è
crescente sul suo dominio D = (−∞, 0) ∪ (0, +∞).
4.10
Massimi e minimi
Se una funzione reale è definita su un intervallo [a, b], i suoi eventuali punti di massimo e di minimo
locale andranno ricercati tra:
1. i punti interni all’intervallo, in cui la funzione è derivabile con derivata nulla (punti stazionari
interni);
Pag. 28
Introduzione al calcolo differenziale
Federico Lastaria, Analisi e Geometria 1
2. i punti in cui la funzione non è derivabile;
3. gli estremi a e b.
Vediamo ora sotto quali condizioni un punto stazionario interno sia un punto di massimo o di minimo
locale. Sia f una funzione reale derivabile su un intorno I = I(x0 ; r) del punto x0 . Supponiamo che
x0 sia un punto stazionario per f , cioè si abbia f 0 (x0 ) = 0. Allora, dai teoremi sulle funzioni con
derivata positiva o negativa, segue subito:
1. Se f 0 (x) è negativa a sinistra di x0 e positiva a destra di x0 , x0 è un punto di minimo locale per
f;
2. Se f 0 (x) è positiva a sinistra di x0 e negativa a destra di x0 , x0 è un punto di massimo locale
per f .
Un altro metodo per decidere se un punto stazionario x0 sia un punto di massimo o di minimo
locale per f utilizza la derivata seconda in x0 .
Teorema 4.13 (Test della derivata seconda). Supponiamo che x0 sia un punto critico per f (punto
interno in cui f 0 (x0 ) = 0). Allora:
a) se f 00 (x0 ) > 0, x0 è un punto di minimo locale.
b) se f 00 (x0 ) < 0, x0 è un punto di massimo locale.
Dimostrazione. Supponiamo f 00 (x0 ) > 0 (Il caso b) è analogo). Si ha:
0 < f 00 (x0 ) = lim
x→x0
f 0 (x0 + h)
f 0 (x0 + h) − f 0 (x0 )
= lim
x→x0
h
h
0
Ne segue (teorema di permanenza del segno) che f (xh0 +h) > 0 per tutti gli h 6= 0 sufficientemente
vicini a 0. Dunque f 0 (x0 + h) deve essere negativo per h < 0 e positivo per h > 0. Quindi x0 è un
punto di minimo locale per f .
4.11
Regole di de L’Hospital
“Riconosco di dovere molto alle menti brillanti dei fratelli Bernoulli, in particolare
del più giovane, che attualmente è professore a Groningen. Ho fatto libero uso delle loro
scoperte”.
(G.F. de L’Hospital14 , Analyse des infiniment petits, pour l’intelligence des lignes
courbes, Paris, 1696).
Teorema 4.14 (Joh. Bernoulli 1691, de L’Hospital 1696. Caso 00 .). Siano f e g due funzioni continue
sull’intervallo [x0 , b] (x0 ∈ R) e derivabili in (x0 , b). Supponiamo che valgano le seguenti condizioni:
14 Guillaume François de L’Hospital (1661-1704), matematico francese, scrisse nel 1696 un testo di calcolo differenziale,
che ebbe un ruolo importante nella diffusione di questa disciplina. Il marchese de L’Hospital fu allievo dei fratelli
Bernoulli (membri di una ben nota famglia di scienziati svizzeri), in modo particolare di Johann Bernoulli (1667-1748),
che verso il 1691/92 aveva pubblicato una delle prime esposizioni del calcolo differenziale e integrale. La “regola di de
L’Hospital” è dovuta in realtà a Johann Bernoulli.
Pag. 29
Introduzione al calcolo differenziale
Federico Lastaria, Analisi e Geometria 1
1. f (x0 ) = g(x0 ) = 0.
2. g 0 (x) 6= 0 per ogni x ∈ (x0 , b).
3. Esiste (finito o infinito) il limite
lim
x→x+
0
Allora esiste anche il limite lim
x→x+
0
(4.20)
f (x)
ed è uguale al precedente:
g(x)
lim+
x→x0
Osservazione.
f 0 (x)
=L
g 0 (x)
f (x)
=L
g(x)
(4.21)
Poiché f e g sono continue in x0 e f (x0 ) = g(x0 ) = 0, si ha
lim f (x) = lim f (x) = 0
x→x0
x→x0
In questo senso si dice che il limite limx→x+
0
f (x)
g(x)
= si presenta sotto la forma 00 .
Dimostrazione. (Per il caso L finito). Premettiamo un’osservazione. Sia x un qualunque punto in
(x0 , b). Allora si puøscrivere
f (x)
f 0 (γ)
= 0
g(x)
g (γ)
per un opportuno γ compreso tra x0 e x, cioè soddisfacente: x0 < γ < x.
Per dimostrarlo, applichiamo il teorema di Cauchy alla coppia di funzioni f ,g sull’intervallo [x0 , x].
Poiché f (x0 ) = g(x0 ) = 0, per il teorema di Cauchy si ha
f (x)
f (x) − f (x0 )
f 0 (γ)
=
= 0
g(x)
g(x) − g(x0
g (γ)
per un opportuno γ soddisfacente x0 < γ < x, come si voleva dimostrare.
A questo punto possiamo concludere, in modo un po’ sbrigativo ma sostanzialmente corretto, nel
modo seguente. Quando x tende a x0 , il punto γ, compreso tra x e x0 , deve tendere a x0 . Quindi,
poiché
f (x)
f 0 (γ)
= 0
g(x)
g (γ)
e lim+
x→x0
f 0 (x)
f (x)
= L, anche il limite lim+
deve esistere, e deve essere uguale a L.
g 0 (x)
x→x0 g(x)
Se vogliamo essere più rigorosi, possiamo arrivare alla tesi usando la “ε-δ definizione” di limite.
f 0 (x)
Prendiamo allora un arbitrario ε > 0. Poiché, per ipotesi, lim+ 0
= L, esiste un δ > 0 tale che
x→x0 g (x)
∀t ∈ (x0 , x0 + δ)
0
f (t)
g 0 (t) − L < ε
(4.22)
Ora prendiamo un qualunque x in (x0 , x0 + δ). Per quanto abbiamo visto sopra,
f (x)
f 0 (γ)
= 0
g(x)
g (γ)
Pag. 30
Introduzione al calcolo differenziale
Federico Lastaria, Analisi e Geometria 1
per un opportuno γ soddisfacente
x0 < γ < x < x0 + δ. Siccome tale γ è compreso tra x0 e x0 + δ,
f 0 (γ)
per la 4.22 si ha 0
− L < ε e quindi
g (γ)
0
f (x)
f (γ)
=
<ε
−
L
−
L
g(x)
g 0 (γ)
Questo prova, per definizione di limite, che anche
lim+
x→x0
f (x)
=L
g(x)
(4.23)
Osservazione. Ovviamente il teorema di de L’Hospital vale anche per i limiti da sinistra (x → x−
0)
e quindi per il limite (ordinario) per x → x0 .
Vale una regola di anche nel caso di un rapporto tra funzioni che tendono entrambe all’infinito
∞
). Riportiamo l’enunciato, senza diquando x tende a x0 . (Forma di indeterminazione del tipo ∞
mostrazione.
Teorema 4.15 (de L’Hospital, caso ∞
∞ ). Siano f e g due funzioni continue sull’intervallo [x0 , b] e
derivabili in (x0 , b). Supponiamo che valgano le seguenti condizioni:
1. lim f (x) = lim g(x) = +∞
x→x+
0
x→x+
0
2. g 0 (x) 6= 0 per ogni x ∈ (x0 , b).
3. Esiste (finito o infinito) il limite
lim+
x→x0
Allora esiste anche il limite lim
x→x+
0
f 0 (x)
=L
g 0 (x)
(4.24)
f (x)
ed è uguale al precedente:
g(x)
lim+
x→x0
f (x)
=L
g(x)
Infine, le regole di de L’Hospital valgono anche per le forme di indeterminazione
tende a +∞ o −∞. L’enunciato è sempre dello stesso tipo: se esiste il limite
(4.25)
0
0
o
∞
∞
quando x
f 0 (x)
=L
x→+∞ g 0 (x)
lim
Pag. 31
Introduzione al calcolo differenziale
Federico Lastaria, Analisi e Geometria 1
f (x)
ed è uguale al precedente:
x→+∞ g(x)
(finito o infinito) allora esiste anche il limite lim
lim
x→+∞
f (x)
=L
g(x)
Osservazione. Il teorema di de L’Hospital dice che (sotto opportune ipotesi), se esiste il limite di
f 0 (x)/g 0 (x) allora esiste anche il limite di f (x)/g(x), e i due limiti sono uguali. Non dice che se esiste
il limite di f (x)/g(x) allora deve esistere anche il limite di f 0 (x)/g 0 (x). Potrebbe esistere il limite di
f (x)/g(x), ma non quello di f 0 (x)/g 0 (x). Per esempio, se f (x) = x + sin x e g(x) = x, allora
lim
x→+∞
ma il limite
f (x)
=1
g(x)
1 + cos x
f 0 (x)
= lim
0
x→+∞
x→+∞ g (x)
1
lim
non esiste.
4.12
Alcuni limiti importanti
Come applicazione del teorema di de L’Hospital, troviamo il valore di alcuni limiti notevoli.
1.
x
1
lim
1+
=e
x→+∞
x
Il limite si presenta sotto la forma di indeterminazione 1∞ . Notiamo che
x
1
1
= ex ln(1+ x )
1+
x
(4.26)
(4.27)
Studiamo allora il limite della funzione all’esponente. Abbiamo
ln 1 + x1
1
lim x ln 1 +
=
lim
x→+∞
x→+∞
x
1/x
Poiché sono soddisfatte le ipotesi del teorema di de L’Hospital (caso
rapporto delle derivate:
(1 + 1/x)−1 (−x−2 )
x→+∞
−x−2
lim
=
0
0 ),
studiamo il limite del
1
=1
x→+∞ 1 + 1/x
lim
Poiché la funzione y 7−→ ey è continua in y = 1, deduciamo che
lim ex ln(1+ x ) = e1 = e
1
x→+∞
In modo del tutto analogo si dimostra che anche
x
1
lim
1+
=e
x→−∞
x
(4.28)
Pag. 32
Introduzione al calcolo differenziale
Federico Lastaria, Analisi e Geometria 1
2. Calcoliamo il limite:
lim x ln x = 0
(4.29)
x→0+
Questo limite presenta una indeterminazione della forma 0 · ∞. Scriviamo
lim x ln x = lim+
x→0+
x→0
ln x
1/x
(4.30)
In questo modo, abbiamo una indeterminazione del tipo ∞/∞. Ricorrendo al teorema di de
L’Hospital, troviamo il limite del rapporto delle derivate:
lim
x→0+
1/x
= lim −x = 0
−1/x2
x→0+
(4.31)
Dunque, limx→0+ x ln x = 0.
3. In modo del tutto analogo, si dimostra che, per ogni a > 0,
lim xa ln x = 0
(4.32)
x→0+
Infatti, basta scrivere
ln x
x−a
e applicare la regola di de L’Hospital, calcolando il limite del rapporto delle derivate:
lim xa ln x = lim
x→0+
x→0+
lim
x→0+
4.13
1
x
−ax−a−1
= lim −
x→0+
xa
=0
a
(4.33)
(4.34)
Confronto tra infiniti
Teorema 4.16 (Confronto tra infiniti). Qualunque sia il numero reale a > 0, quando x tende a +∞
la funzione esponenziale ex tende all’infinito più velocemente di xα , mentre xα tende all’infinito più
velocemente della funzione logaritmo ln x.
Ricordiamo che, date due funzioni f (x) e g(x), tali che f (x) −→ +∞ e g(x) −→ +∞ per x → a,
(dove a puøessere un numero reale, oppure −∞, oppure +∞), si dice che f (x) tende all’infinito più
velocemente di g(x), se
g(x)
=0
lim
x→a f (x)
(x)
o, in modo equivalente, se limx→a fg(x)
= +∞. Dunque si puøenunciare il teorema dicendo che, per
ogni α > 0, valgono questi limiti fondamentali:
xα
=0
x→+∞ ex
(4.35)
ln x
=0
xα
(4.36)
lim
lim
x→+∞
Dimostrazione. Il limite 4.35 è del tipo ∞/∞ e sono soddisfatte le ipotesi per usare la regola di de
α
L’Hospital. Ovviamente è sufficiente dimostrare che limx→+∞ xex = 0 nell’ipotesi che α = m sia un
Pag. 33
Introduzione al calcolo differenziale
Federico Lastaria, Analisi e Geometria 1
numero positivo intero.15 Applicando m volte il teorema di de L’Hospital a xm /ex , otteniamo alla
fine il rapporto m!/ex , che non è una forma indeterminata e ovviamente tende a zero.
In modo analogo si procede per il limite 4.36. Applicando la regola di de L’Hospital, siamo condotti
a valutare il limite:
1
1
x
= lim
=0
lim
x→+∞ αxα
x→+∞ αxα−1
Concludiamo che il limite 4.36 è zero.
Osservazione.
Dal limite (4.35) segue che, per ogni α > 0, vale:
1
lim+
x→0
e− x
=0
xα
Infatti, con la sostituzione 1/x = t, il limite si trasforma in
tα
=0
t→+∞ et
lim
15 Se
xm
ex
α non fosse intero, prendiamo un intero m > α. Poiché 0 <
→ 0, anche
xα
ex
xα
ex
<
xm
,
ex
dal teorema del confronto segue che, se
→ 0.
Pag. 34
Introduzione al calcolo differenziale
5
Federico Lastaria, Analisi e Geometria 1
Rapporto tra derivabilità e limiti della derivata
Vogliamo indagare le seguenti questioni:
0
a) Se il limite limx→x+ f 0 (x) esiste, possiamo concludere che esiste la derivata destra f+
(x0 ) di f
0
in x0 ? (Idem per la derivata sinistra e per la derivata).
0
b) Se il limite limx→x+ f 0 (x) non esiste, possiamo concludere che la derivata destra f+
(x0 ) di f in
0
x0 non esiste?
Anticipando sulle conclusioni:
a) La risposta alla prima domanda è negativa; ma se aggiungiamo l’ipotesi che f sia continua in
x0 , la risposta è affermativa.
b) La risposta alla seconda domanda è negativa.
5.1
Relazione tra derivate e limiti delle derivate
Ricordiamo le definizioni. Si dice derivata di f nel punto x0 (rispettivamente: derivata destra, o
(x0 )
per x → x0 (rispettiderivata sinistra) il limite, se esiste finito, del rapporto incrementale f (x)−f
x−x0
+
−
0
vamente: per x → x0 , per x → x0 ). La derivata si denota con f 0 (x0 ) (rispettivamente: con f+
(x0 ),
0
(x0 )). Dunque, quando i limiti in questione esistono finiti, abbiamo per definizione:
f−
f 0 (x0 )
0
f+
(x0 )
0
f−
(x0 )
f (x) − f (x0 )
x − x0
f (x) − f (x0 )
= lim+
x − x0
x→x0
=
lim
(5.1)
x→x0
=
lim−
x→x0
(5.2)
f (x) − f (x0 )
x − x0
(5.3)
Ovviamente:
Una funzione f è derivabile in x0 se e solo se esistono, nel punto x0 , sia la derivata destra sia la
derivata sinistra, e sono uguali tra loro.
Infatti, per una qualunque funzione g(x) vale limx→x0 g(x) = L se e solo se il limite da sinistra
limx→x− g(x) e il limite da destra limx→x+ g(x) esistono entrambi e sono entrambi uguali a L. (Nel
0
0
nostro caso, la funzione g(x) è il rapporto incrementale relativo a x0 ).
Teorema 5.1. Sia f una funzione reale definita su un intorno aperto I del punto x0 . Supponiamo
che f sia continua nel punto x0 e sia derivabile in ogni punto x 6= x0 . Valgono allora i fatti seguenti.
0
1. Se esiste finito il limite da destra limx→x+ f 0 (x), allora esiste la derivata destra f+
(x0 ) e
0
0
f+
(x0 )
= lim+ f 0 (x)
(5.4)
x→x0
Pag. 35
Introduzione al calcolo differenziale
Federico Lastaria, Analisi e Geometria 1
0
2. Se esiste finito il limite da sinistra limx→x− f 0 (x), allora esiste la derivata sinistra f−
(x0 ) e
0
0
f−
(x0 ) = lim− f 0 (x)
(5.5)
x→x0
0
0
3. Di conseguenza: se esistono finiti sia limx→x+ f 0 (x)(= f+
(x0 )) sia limx→x− f 0 (x)(= f−
(x0 )) e
0
0
0
sono uguali tra loro – vale a dire, se esiste il limx→x0 f (x) – allora f è derivabile in x0 e
f 0 (x0 ) = lim f 0 (x)
x→x0
(5.6)
Osservazione 5.2. L’ipotesi che f sia continua in x0 non si può eliminare, ossia l’affermazione “Se
esiste il limite di f 0 (x) quando x → x0 , allora esiste f 0 (x0 )” non è corretta. Ad esempio, si consideri
la funzione
0
se x 6= 0
f (x) =
(5.7)
1
se x = 0
Il limite limx→0 f 0 (x) esiste e vale 0 (perché f 0 (x) = 0 per ogni x 6= 0), ma f non è derivabile in x0 = 0
(perché non è continua in x0 = 0).
Dimostrazione.
1. Supponiamo che esista (finito) il limite da destra limx→x+ f 0 (x); dimostriamo che esiste la
0
derivata destra, e che essa coincide con tale limite. A tale scopo, usiamo la definizione e calcoliamo il
limite del rapporto incrementale da destra:
lim+
x→x0
f (x) − f (x0 )
x − x0
(5.8)
Si noti che sono soddisfatte le ipotesi del teorema di de L’Hospital. Si ha dunque:
lim+
x→x0
f (x) − f (x0 )
= lim+ f 0 (x)
x − x0
x→x0
(5.9)
e cosı̀ la tesi (5.4) è dimostrata.
Se si preferisce, per studiare il limite (5.8) si può utilizzare direttamente il teorema di Lagrange,
del quale sono soddisfatte le ipotesi su ogni intervallo del tipo [x0 , x]. Per ogni x, esiste un γ tra x0 e
x per il quale vale
f (x) − f (x0 )
= f 0 (γ)
(5.10)
x − x0
In breve16 , se x → x0 , il punto γ (compreso tra x0 e x) tende a x0 , e quindi, poiché per ipotesi esiste
(x0 )
il limx→x+ f 0 (x), esiste anche il limite limx→x+ f (x)−f
e tali limiti sono uguali.
x−x0
0
0
2. Come nel punto 1. Si calcola il limite del rapporto incrementale da sinistra limx→x−
0
usando L’Hospital.
f (x)−f (x0 )
x−x0
3. Si tratta di un’immediata conseguenza dei due punti 1 e 2:
16 Si
veda la dimostrazione del teorema 4.14 di de L’Hospital, se si vuole essere più formali.
Pag. 36
Introduzione al calcolo differenziale
Federico Lastaria, Analisi e Geometria 1
0
se esistono (finiti) sia limx→x+ f 0 (x) (che abbiamo dimostrato essere f+
(x0 )) sia limx→x− f 0 (x)
0
0
0
(uguale a f−
(x0 ) e sono uguali tra loro – vale a dire, se esiste il limx→x0 f 0 (x) – allora esistono la
derivata destra e la derivata sinistra e sono uguali tra loro. Di conseguenza f è derivabile in x0 e
f 0 (x0 ) = lim f 0 (x)
x→x0
(5.11)
Q.E.D.
5.2
Osservazioni
Osservazione 5.3. Supponiamo che f sia continua su un intorno destro [x0 , x0 + r) di x0 e
lim f 0 (x) = +∞
x→x+
0
(5.12)
Allora, sempre per il teorema di de L’Hôpital, possiamo concludere che anche il limite da destra del
rapporto incrementale è uguale a +∞:
lim+
x→x0
f (x) − f (x0 )
= +∞
x − x0
(5.13)
0
Possiamo scrivere, anche se impropriamente, f+
(x0 ) = +∞.
Analogamente, se f è continua su un intorno sinistro (x0 − r, x0 ]) di x0 e
lim f 0 (x) = −∞
x→x+
0
si avrà
lim
x→x+
0
f (x) − f (x0 )
= −∞
x − x0
(5.14)
(5.15)
0
(x0 ) = +∞.
e scriveremo f−
Analoghe considerazioni valgono per i limiti per → x−
0.
Osservazione 5.4. Puøsuccedere che il limx→x0 f 0 (x) non esista, ma che la funzione f sia derivabile
in x0 . Si veda il seguente esercizio.
Esercizio 5.5. Verificare che la funzione
(
f (x) =
x2 sin
0
1
x
se x 6= 0
(5.16)
se x = 0
è derivabile in x0 = 0, ma non esiste il limx→x0 f 0 (x).
Soluzione. Per studiare la derivabilità di f in 0, usiamo la definizione di derivata come limite del
rapporto incrementale:
x2 sin x1 − 0
f (x) − f (0)
1
= lim
= lim x sin = 0
x→0
x→0
x→0
x−0
x
x
lim
(5.17)
Pag. 37
Introduzione al calcolo differenziale
Federico Lastaria, Analisi e Geometria 1
Figure 2: Grafico di x2 sin
1
x
vicino all’origine.
Dunque f è derivabile in x0 = 0 e f 0 (0) = 0.
La derivata f 0 (x), per x 6= 0, è data da
f 0 (x) = 2x sin
1
1
− cos
x
x
(5.18)
Non esiste il limite di f 0 (x) per x → 0, perché 2x sin x1 tende a zero e cos x1 oscilla tra −1 e 1.
5.3
Punti angolosi e di cuspide
Riassumiamo i casi possibili, quando si studiano i limiti della derivata prima:
lim f 0 (x)
x→x−
0
lim f 0 (x)
(5.19)
x→x+
0
Le nostre ipotesi sulla funzione reale f sono quelle del teorema 5.1: il dominio di f è un intorno
aperto I del punto x0 ∈ I, f è continua nel punto x0 e derivabile in ogni punto x dell’intervallo bucato
I \ {x0 }.
1. Primo caso. I due limiti (5.19) esistono, entrambi finiti, e sono uguali tra loro. Per il teorema
0
5.1 essi coincidono rispettivamente con la derivata a sinistra f−
(x0 ) e con la derivata a destra
0
f+ (x0 ). Dunque la funzione f è derivabile in x0 e
0
0
f 0 (x0 ) = f−
(x0 ) = f+
(x0 )
2. Secondo caso. I due limiti (5.19) esistono, entrambi finiti, e sono diversi tra loro.
0
0
Allora (per il teorema 5.1 ) esistono in x0 la derivata sinistra f−
(x0 ) e la derivata destra f+
(x0 )
0
f−
(x0 ) = lim− f 0 (x)
x→x0
0
f+
(x0 ) = lim+ f 0 (x)
(5.20)
x→x0
0
0
Poiché f−
(x0 ) 6= f+
(x0 ), la funzione f non è derivabile in x0 . Si dice che il punto (x0 , f (x0 )) è
punto angoloso per il grafico della funzione f .
Pag. 38
Introduzione al calcolo differenziale
Federico Lastaria, Analisi e Geometria 1
0
0
f−
(x0 ) 6= f+
(x0 )
Punto angoloso.
3. Terzo caso. Uno dei due limiti (5.19) esiste finito e l’altro vale +∞ oppure −∞.
La funzione f non è derivabile in x0 e ha in x0 solo la derivata a sinistra, o solo a destra.
Anche in questo caso si dice che (x0 , f (x0 )) è punto angoloso per il grafico di f .
0
f+
(x0 ) = +∞
0
f−
(x0 ) finita
Punto angoloso.
0
f−
(x0 ) finita
0
f+
(x0 ) = −∞
Punto angoloso.
4. Quarto caso. Se
lim f 0 (x) = +∞
x→x−
0
lim f 0 (x) = −∞
x→x+
0
(o viceversa). Abbiamo visto (teorema di de L’Hôspital) che anche il limite del rapporto incrementale da sinistra è +∞, e lo stesso rapporto da destra tende a −∞. Dunque f non è derivabile
in x0 . Il punto (x0 , f (x0 )) è un punto di cuspide per il grafico della funzione f .
0
0
f−
(x0 ) = +∞, f+
(x0 ) = −∞
0
0
f−
(x0 ) = −∞, f+
(x0 ) = +∞
Punto di cuspide.
p
Esempio: − |x|
Punto di cuspide.
p
Esempio: |x|
5. Quinto caso. I due limiti (5.19) valgono entrambi +∞, o valgono entrambi −∞.
Ragionando come nell’ultimo caso, si vede che ovviamente la funzione f non è derivabile in x0 . Il
punto (x0 , f (x0 )) del grafico di f è un punto con retta tangente verticale (di equazione x = x0 ).
0
0
f−
(x0 ) = −∞ = f+
(x0 )
0
0
f−
(x0 ) = +∞ = f+
(x0 )
Punto a tangente verticale.
√
Esempio: − 3 x
Punto a tangente verticale.
√
Esempio: 3 x
6. Sesto caso. Uno (almeno) dei due limiti (5.19) non esiste (né finito, né ±∞).
In questo caso, a priori non si puødire nulla sulla derivabilità di f in x0 . La funzione f potrebbe
essere derivabile in x0 oppure no. Per studiare in questo caso la derivabilità di f in x0 , si dovrà
in generale studiare direttamente il limite del rapporto incrementale di f in x0 .
Pag. 39
Introduzione al calcolo differenziale
Federico Lastaria, Analisi e Geometria 1
Per illustrare quest’ultimo caso, si considerino le due funzioni
(
f (x) =
x2 sin
0
1
x
se x 6= 0
(
g(x) =
se x = 0
x sin
0
1
x
se x 6= 0
(5.21)
se x = 0
Quando x → 0, non esiste né il limite di
f 0 (x) = 2x sin
1
1
− cos
x
x
(5.22)
né il limite di
1
1
1
− cos
(5.23)
x x
x
(Infatti, se x = 1/2kπ (k ∈ Z), si ha g 0 (x) = −2kπ, mentre se x = 1/(2k + 1)π, si ha g 0 (x) =
(2k + 1)π). Abbiamo già visto (esercizio 5.5) che la funzione f è derivabile in 0.
g 0 (x) = sin
Per vedere se la funzione g(x) è derivabile in 0, studiamo il rapporto incrementale:
x sin x1 − 0
1
g(x) − g(0)
= lim
= lim sin
x→0
x→0
x→0
x−0
x
x
lim
(5.24)
Ovviamente tale limite non esiste (vicino all’origine sin x1 oscilla) e quindi g non è derivabile in
0.
Figure 3: Il grafico di g(x) = x sin
1
x
vicino all’origine oscilla tra le rette y = x e y = −x.
Pag. 40
Introduzione al calcolo differenziale
Federico Lastaria, Analisi e Geometria 1
6
Formule di Taylor
6.1
Il polinomio di Taylor
Teorema 6.1 (Polinomio di Taylor). Sia f una funzione derivabile n volte in un punto x0 . Allora
esiste un polinomio Pn (x), e uno soltanto, di grado minore o uguale a n, che ha in comune con f , nel
punto x0 , tutte le prime n derivate, cioè che soddisfa le n + 1 condizioni17 :
Pn0 (x0 ) = f 0 (x0 ),
Pn (x0 ) = f (x0 ),
Pn00 (x0 ) = f 00 (x0 ),
...,
Pn(n) (x0 ) = f (n) (x0 )
(6.1)
Tale polinomio, detto polinomio di Taylor di ordine n di f , centrato in x0 , è dato da:
Pn (x)
=
=
f (x0 ) + f 0 (x0 )(x − x0 ) +
n
X
f (k) (x0 )
k!
k=0
f (n) (x0 )
f 00 (x0 )
(x − x0 )2 + · · · +
(x − x0 )n
2!
n!
(6.2)
(x − x0 )k
Il grado del polinomio Pn (x) è esattamente n se
f (n) (x0 )
n!
6= 0, altrimenti sarà minore di n.
Dimostrazione. Si vede subito con un semplice conto (calcolando le derivate successive) che il polinomio 6.2 soddisfa le n + 1 condizioni 6.1. Questo prova l’esistenza di un polinomio con le proprietà
richieste. Quanto alla unicità di tale polinomio, consideriamo un generico polinomio di grado ≤ n,
centrato in x0 :
P (x) = a0 + a1 (x − x0 ) + a2 (x − x0 )2 + · · · + an (x − x0 )n
(6.3)
Dimostriamo che se tale polinomio soddisfa le condizioni 6.1, allora necessariamente deve coincidere
con il polinomio 6.2. Le derivate successive di P (x) (includendo la derivata di ordine 0, che coincide
per definizione con il polinomio stesso), sono:
P (x)
=
a0 + a1 (x − x0 ) + a2 (x − x0 )2 + a3 (x − x0 )3 · · · + an (x − x0 )n
P 0 (x)
=
a1 + 2a2 (x − x0 ) + 3a3 (x − x0 )2 · · · + nan (x − x0 )n−1
P 00 (x)
=
2a2 + 3 · 2a3 (x − x0 ) + · · · + n · (n − 1)an (x − x0 )n−2
P 000 (x)
=
3 · 2a3 + · · · + n · (n − 1) · (n − 2)an (x − x0 )n−3
.. =
P
(n)
(x)
=
..
n!an
Valutando queste derivate successive di P (x) in x0 e imponendo le condizioni 6.1, si ottiene:
f (x0 )
=
P (x0 ) = a0
f (x0 )
=
P 0 (x0 ) = a1
f 00 (x0 )
=
P 00 (x0 ) = 2a2
=
P 000 (x0 ) = 3!a3
0
000
f (x0 )
.. =
f
(n)
(x0 )
=
..
P (n) (x0 ) = n!an
Dunque i coefficienti a0 , ..., an del polinomio di Taylor sono esattamente quelli del polinomio 6.2 :
a0 = f (x0 ),
17 La
a1 = f 0 (x0 ),
a2 =
f 00 (x0 )
,
2!
a3 =
f 000 (x0 )
, ...,
3!
an =
f (n) (x0 )
n!
(6.4)
derivata di ordine zero di una funzione è, per definizone, la funzione stessa.
Pag. 41
Introduzione al calcolo differenziale
Federico Lastaria, Analisi e Geometria 1
come si voleva dimostrare.
Si noti che il polinomio di Taylor di ordine 1 di una funzione f , centrato in x0 , è
P1 (x) = f (x0 ) + f 0 (x0 )(x − x0 )
(6.5)
Il grafico di tale polinomio è la retta tangente al grafico di f nel punto (x0 , f (x0 )).
Funzioni di classe C k
6.2
Premettiamo alcune definizioni. Sia I un intervallo aperto dell’asse reale. Denotiamo con C 0 (I)
l’insieme di tutte le funzioni reali18 continue su I. Per ogni intero k ≥ 1, denotiamo con C k (I)
l’insieme di tutte le funzioni reali definite su I, che sono derivabili k volte su I, e le cui derivate
successive f, f 0 , .., f k sono tutte continue su I, fino a quella di ordine k incluso19 . Se una funzione f
appartiene a C k (I), diremo anche che f è di classe C k . Si dice che f è di classe C ∞ , o che è liscia,
se f è di classe C k per ogni k ∈ N. Gli spazi C k (I) sono esempi di spazi funzionali, cioè di spazi i cui
elementi sono funzioni.
Esempi
1. Le funzioni sin x, cos x, expa (x) (esponenziale di base a, a > 0, a 6= 1), xn con n ∈ N, arctan x,
sono tutte lisce (di classe C ∞ ) su R.
2. La funzione ln x è di classe C ∞ sulla semiretta aperta (0, +∞).
3. f (x) = |x| su R è C 0 ma non C 1 .
4. f (x) = x|x| su R è C 1 ma non C 2 .
5. f (x) = |x|3 su R è C 2 ma non C 3 .
6.3
Studio locale. Formula di Taylor con il resto nella forma di Peano
Lo sviluppo di Taylor con il resto nella forma di Peano si utilizza per studiare una funzione in un
intorno di un punto fissato x0 . L’idea di base è di approssimare la funzione f in un intorno di x0 ,
mediante il suo polinomio di Taylor Tn (f ; x0 ) di ordine n, centrato in x0 :
Tn (f ; x0 ) = f (x0 ) + f 0 (x0 )(x − x0 ) +
1
f 00 (x0 )
(x − x0 )2 + · · · + f (n) (x0 )(x − x0 )n
2!
n!
(6.6)
Il teorema di Taylor con il resto nella forma di Peano (che ora dimostriamo) afferma che la differenza
tra la funzione f (x) e il suo polinomio di Taylor 6.6 è un infinitesimo, per x → x0 , di ordine superiore
rispetto all’infinitesimo (x − x0 )n .
Teorema 6.2 (Formula di Taylor con il resto di Peano). Sia f una funzione di classe C n su un
intervallo aperto I dell’asse reale. Fissiamo un punto x0 in I. Allora vale il seguente sviluppo:
f (x) = f (x0 ) + f 0 (x0 )(x − x0 ) +
f 00 (x0 )
1
(x − x0 )2 + · · · + f (n) (x0 )(x − x0 )n + o((x − x0 )n ) (6.7)
2!
n!
18 Dire
che una funzione è reale significa che il suo codominio è un sottoinsieme dell’insieme R dei numeri reali.
richieste sono un po’ ridondanti. Infatti, se una funzione è derivabile k volte, la continuità di tutte le derivate
f, f 0 , f 00 , .., f (k−1) è automatica, perché una funzione derivabile è continua. Basterebbe dire che f è di classe C k se è
derivabile k volte e la sua derivata k-esima è continua.
19 Queste
Pag. 42
Introduzione al calcolo differenziale
Federico Lastaria, Analisi e Geometria 1
Dimostrazione. Ricordiamo che, per definizione, una funzione g(x) è un o((x − x0 )n ) (si legge: opiccolo di (x − x0 )n ) in un intorno di x0 , se
lim
x→x0
g(x)
=0
(x − x0 )n
Quindi, per dimostrare la formula di Taylor 6.7 occorre dimostrare che
f (x) − f (x0 ) − f 0 (x0 )(x − x0 ) −
lim
x→x0
f 00 (x0 )
1
(x − x0 )2 − · · · − f (n) (x0 )(x − x0 )n
2!
n!
=0
(x − x0 )n
(6.8)
Per capire come vanno le cose, basta studiare in dettaglio il caso n = 2. Usando due volte di seguito
il teorema di L’Hospital, abbiamo
f (x) − f (x0 ) − f 0 (x0 )(x − x0 ) −
lim
x→x0
(x − x0 )2
1 00
2! f (x0 )(x
− x0 )2
=
(6.9)
=
(6.10)
00
lim
x→x0
f 0 (x) − f 0 (x0 ) − f (x0 )(x − x0 )
2(x − x0 )
f 00 (x) − f 00 (x0 )
lim
x→x0
2
=
0
(6.11)
Poiché l’ultimo limite (giustificato dalla continuità di f 00 in x0 ) esiste e vale 0, per il teorema di de
L’Hospital anche il limite iniziale (6.9) esiste e vale 0, come volevamo dimostrare.
La formula per un n arbitrario (e per una funzione di classe C n ) si dimostra esattamente nello
stesso modo, iterando la regola di de L’Hospital.
6.3.1
Alcune importanti approssimazioni locali
Usando la formula di Taylor locale 6.7, si verifica che valgono, per x → 0 e per ogni naturale n, i
seguenti importanti sviluppi sviluppi.
exp x =
=
1+x+
n
X
k=0
cos x =
=
1−
sin x
= x−
=
x2
x4
x6
x2n
+
−
+ · · · + (−1)2n
+ o(x2n+1 )
2!
4!
6!
(2n)!
(2k)!
n
X
(−1)n x2n
k=0
(6.13)
+ o(x2n+1 )
x3
x5
x7
x2n+1
+
−
· · · + (−1)n
+ o(x2n+2 )
3!
5!
7!
(2n + 1)!
(2n)!
(6.12)
xk
+ o(xn )
k!
n
X
(−1)k x2k
k=0
x2
x3
xn
+
+ ··· +
+ o(xn )
2!
3!
n!
(6.14)
+ o(x2n+2 )
Pag. 43
Introduzione al calcolo differenziale
ln(1 + x)
Federico Lastaria, Analisi e Geometria 1
=
=
x2
x3
x4
xn
+
−
· · · + (−1)n+1
+ o(xn )
2
3
4
n
n
X
xk
(−1)k+1
+ o(xn )
k
x−
(6.15)
k=1
(1 + x)α
α(α − 1) · · · + (α − n + 1) n
α(α − 1) 2
x + ··· +
x + o(xn )
1 + αx +
2!
n!
n X
α k
=
x + o(xn )
(Per ogni numero α).
k
=
(6.16)
k=0
arctan x =
=
x5
x7
x3
+
−
+ o(x8 )
3
5
7
n
X
x2k+1
(−1)k
+ o(x2n+2 )
2k + 1
x−
(6.17)
k=0
arcsin x
tan x
= x+
x3
+ o(x4 )
3!
1
2
= x + x3 + x5 + o(x6 )
3
15
(6.18)
(6.19)
(È difficile dare l’espressione dello sviluppo di tan x. I coefficienti si scrivono in funzione dei numeri
di Bernoulli Bn ).
6.4
Studio su un intervallo. Formula di Taylor con il resto nella forma di
Lagrange
La formula di Taylor di f centrata in x0 , con il resto nella forma di Lagrange, si utilizza per studiare
una funzione f su un intervallo (magari ‘grande’) contenente il punto x0 . (Ovviamente potrà servire
anche a studiare la funzione f localmente, cioè in un piccolo intorno di x0 ).
Teorema 6.3 (Formula di Taylor con il resto di Lagrange). Sia f una funzione derivabile n + 1 volte
su un intervallo aperto I dell’asse reale. Fissiamo un punto x0 in I. Allora, per ogni altro punto
x ∈ I esiste un punto c, compreso tra x0 e x, per il quale vale:
f (x) = f (x0 )+f 0 (x0 )(x−x0 )+
Il termine
f n (c)
n! (x
f (n)
f (n+1) (c)
f 00 (x0 )
(x−x0 )2 +· · ·+
(x0 )(x−x0 )n +
(x−x0 )n+1 (6.20)
2!
n!
(n + 1)!
− x0 )n si chiama il resto nella forma di Lagrange.
Si noti che se n = 0, la formula di Taylor 6.20 si riduce al teorema di Lagrange:
f (x) = f (x0 ) + f 0 (c)(x − x0 )
(6.21)
Pag. 44
Introduzione al calcolo differenziale
Federico Lastaria, Analisi e Geometria 1
Per dimostrare la formula di Taylor 6.20 useremo il teorema di Cauchy, che qui richiamiamo:
Teorema. [Cauchy] Supponiamo che h(x) e k(x) siano funzioni definite su un intervallo aperto
I, entrambe derivabili, con k 0 (x) 6= 0 per ogni x ∈ I. Siano x0 , x1 due punti qualunque di I. Allora
esiste un numero c, compreso tra x0 e x1 , per il quale vale la seguente uguaglianza:
h(x1 ) − h(x0 )
h0 (c)
= 0
k(x1 ) − k(x0 )
k (c)
(6.22)
In particolare, se entrambe le funzioni h e k si annullano nel punto x0 , cioè h(x0 ) = k(x0 ) = 0,
l’uguaglianza 6.22 diventa
h0 (c)
h(x1 )
= 0
(6.23)
k(x1 )
k (c)
per un opportuno c tra x0 e x1 . (Sarà in questa forma che utilizzeremo il teorema di Cauchy nella
dimostrazione della formula di Taylor).
Dimostrazione. (Formula di Taylor 6.20). Dimostriamo la formula nel caso particolare n = 1, vale a
dire dimostriamo che esiste un numero c, compreso tra x0 e x per il quale vale:
00
f (x) = f (x0 ) + f 0 (x0 )(x − x0 ) +
f (c)
(x − x0 )2
2!
(6.24)
La dimostrazione per n arbitrario è esattamente la stessa. La formula 6.24, che vogliamo dimostrare,
equivale ovviamente (per x 6= x0 ) a
00
f (c)
f (x) − f (x0 ) − f 0 (x0 )(x − x0 )
=
2
(x − x0 )
2!
(6.25)
Quindi quello che dobbiamo dimostrare è che la frazione
f (x) − f (x0 ) − f 0 (x0 )(x − x0 )
(x − x0 )2
(6.26)
00
f (c)
si puøscrivere come
per un opportuno numero c tra x0 e x.
2!
Chiamiamo rispettivamente N (x) e D(x) il numeratore e il denominatore di 6.26:
N (x) = f (x) − f (x0 ) − f 0 (x0 )(x − x0 ),
D(x) = (x − x0 )2
Notiamo che N (x0 ) = 0 e D(x0 ) = 0. Inoltre, con un calcolo diretto, si ricava subito:
N 0 (x) = f 0 (x) − f 0 (x0 ),
D0 (x) = 2(x − x0 )
(6.27)
Per il teorema di Cauchy (siamo nel caso particolare 6.23) esiste allora un punto c1 per il quale vale:
N (x)
N (x) − N (x0 )
N 0 (c1 )
f 0 (c1 ) − f 0 (x0 )
=
= 0
=
D(x)
D(x) − D(x0 )
D (c1 )
2(c1 − x0 )
(6.28)
Se, per fissare le idee, supponiamo x0 < x, avremo
x0 < c1 < x
(6.29)
Adesso applichiamo di nuovo il teorema di Cauchy nella forma 6.23 alla coppia di funzioni h(x) =
f 0 (x) − f 0 (x0 ) e k(x) = 2(x − x0 ), sull’intervallo [x0 , c1 ]. Si noti che tali funzioni si annullano entrambe
Pag. 45
Introduzione al calcolo differenziale
Federico Lastaria, Analisi e Geometria 1
in x0 . Le loro derivate sono h0 (x) = f 00 (x) e h0 (x) = 2. Dunque, per la formula 6.23, esiste un numero
c2 , con x0 < c2 < c1 , per il quale si ha
h(c1 ) − h(x0 )
h(c1 )
f 0 (c1 ) − f 0 (x0 )
f 00 (c2 )
=
=
=
k(c1 ) − k(x0 )
k(c1 )
2(c1 − x0 )
2
(6.30)
Siccome sappiamo da 6.29 che c1 è compreso tra x0 e x, anche c2 è compreso tra x0 e x:
x0 < c2 < x
Scrivendo c al posto di c2 , abbiamo dunque dimostrato la formula 6.25.
Nello stesso modo, applicando più volte di seguito il teorema di Cauchy, si dimostra la formula di
Taylor 6.20 nel caso di un intero positivo n arbitrario.
Osservazione. Si noti che abbiamo richiesto che f fosse derivabile n + 1 volte, ma non abbiamo
richiesto la continuità della derivata di ordine massimo n + 1.
6.4.1
Un’applicazione: stima dell’errore
Problema 6.4. Nell’intervallo [0, π/4], approssimiamo sin x con il polinomio di Taylor
P3 (x) = x −
x3
3!
Dare una stima dell’errore che si compie.
Soluzione. Si noti che i due polinomi di Taylor P3 e P4 della funzione sin, centrati in 0, sono entrambi
3
3
uguali a x − x3! (perché la derivata quarta di sin in 0 si annulla). Se vediamo x − x3! come il polinomio
di Taylor P4 , allora il teorema di Taylor con il resto nella forma di Lagrange, assicura che esiste un
numero c tra 0 e π4 per il quale vale:
sin x = x −
x3
cos c 5
+
x
3!
5!
L’errore che si compie è dunque
cos c (π/4)5
x5 ≤
' 0, 0024
5!
5!
3
Se invece pensiamo a x − x3! come al polinomio di Taylor P3 , per il teorema di Taylor 6.3 con il resto
di Lagrange abbiamo, per un opportuno d tra 0 e π4 ,
sin x = x −
La stima dell’errore è allora
x3
sin d 4
+
x
3!
4!
sin d 4 (π/4)4
≤
x
' 0, 0158..
4!
4!
meno precisa della precedente.
Pag. 46
Introduzione al calcolo differenziale
6.5
Federico Lastaria, Analisi e Geometria 1
Complementi: Prime nozioni sulle funzioni sviluppabili in serie di
potenze.
(Gli argomenti di questo paragrafo non sono in programma).
Torniamo all’enunciato del Teorema di Taylor 6.3 con il resto nella forma di Lagrange: per ogni
x nell’intervallo in cui la funzione è definita (anche se x è ‘lontano’ da x0 ) esiste un opportuno c
(compreso tra x0 e x) per cui vale lo sviluppo
f (x) = Pn−1 (x) + Rn−1
(6.31)
dove Rn−1 è il resto nella forma di Lagrange
1 n
f (c)(x − x0 )n
n!
(6.32)
Ora fissiamo x in I. Se, al tendere di n all’infinito, il termine complementare (il resto) tende a zero:
lim [f (x) − Pn−1 (x)] = lim Rn−1 = 0
n→+∞
n→+∞
(6.33)
allora possiamo concludere - per definizione di somma di una serie numerica - che f (x) è la somma
della serie di potenze (‘polinomio infinito’)
+∞
X
1 n
f (x0 )(x − x0 )n
n!
n=0
(6.34)
e quindi scriveremo:
f (x) =
+∞
X
1 n
f (x0 )(x − x0 )n
n!
n=0
(6.35)
In questo caso, diremo che la funzione f è sviluppabile in serie di Taylor nell’intervallo I.
Occorre stare attenti. Se la funzione f ha derivate di ogni ordine su un intervallo I dell’asse reale e
x0 appartiene a I, non è detto che per ogni x in I valga 6.35, cioè non è detto che per ogni x la serie
di Taylor di f - centrata in a - sia convergente e converga proprio a f (x).
Ad esempio, la funzione f (x) =
di Taylor centrata in x0 = 0 è
+∞
X
1
1−x
ha derivate di ogni ordine in (−∞, 1) ∪ (1, +∞). La sua serie
xn = 1 + x + x2 + x3 + · · · + xn + · · ·
n=0
(Dimostrarlo). Però solo nell’intervallo −1 < x < 1 vale lo sviluppo
+∞
X
1
=
xn = 1 + x + x2 + x3 + · · · + xn + · · ·
1 − x n=0
mentre la serie non converge se |x| > 1. (Si tratta della serie geometrica di ragione x).
Le funzioni ex , sin x e cos x sono invece sviluppabili in serie di Taylor su tutto l’asse reale, come
vedremo nei prossimi paragrafi.
Pag. 47
Introduzione al calcolo differenziale
Federico Lastaria, Analisi e Geometria 1
La serie esponenziale Applichiamo la formula di Taylor
f (x) = f (x0 )+f 0 (x0 )(x−x0 )+
f 00 (x0 )
f (n−1)
f (n) (c)
(x−x0 )2 +· · ·+
(x0 )(x−x0 )n−1 +
(x−x0 )n (6.36)
2!
(n − 1)!
n!
alla funzione esponenziale f (x) = ex , x ∈ R. Poiché Dex = ex , per ogni intero positivo n si ha
Dn (ex ) = ex . In x0 = 0 abbiamo allora, per ogni n,
f (n) (0) = 1
(6.37)
Quindi la formula di Taylor dà questo risultato: Comunque si fissi un numero x ∈ R, e per ogni
numero naturale n, esiste un numero ξ, compreso tra x e 0, per il quale vale lo sviluppo:
ex = 1 + x +
x3
xn−1
xn ξ
x2
+
+ ··· +
+
e
2!
3!
(n − 1)!
n!
Ora dimostriamo che, se x resta fisso e n tende a +∞, il resto Rn =
xn ξ
n! e
(6.38)
tende a zero.
Dimostrazione. Fissiamo, in modo arbitrario, un numero x in R e numero naturale n. Il teorema di Taylor
assicura che esiste un numero ξ, compreso tra 0 e x, per il quale vale 6.38. Sia nel caso x < ξ < 0 che nel caso
0 < ξ < x, vale | ξ |<| x | e quindi
eξ ≤ e|ξ| < e|x|
Dunque esiste una costante M = e|x| tale che, qualunque sia il numero naturale n, per il numero ξ che compare
in 6.38 vale la disuguaglianza
eξ < M
(6.39)
Si dimostra facilmente che, per ogni x fissato, la successione
lim
n→+∞
xn
tende a zero
n!
20
xn
=0
n!
per n che tende a +∞:
(6.40)
Dunque anche il resto della formula di Taylor
| Rn |=
| x |n ξ
| x |n
e ≤
M = an M
n!
n!
tende a zero quando n tende a +∞.
Pertanto la funzione ex è somma della serie di potenze
ex =
+∞ n
X
x
x2
x3
=1+x+
+
+ ···
n!
2!
3!
n=0
(6.41)
Si noti che la dimostrazione mostra che lo sviluppo 6.41 vale per ogni x in R.
20 Dimostriamo
che limn→+∞
xn
n!
= 0. Poniamo
an =
Sia m il più piccolo intero tale che
| x |n
n!
1
|x|
≤ . Allora
m+1
2
am+1 =
| xm+1 |
| x | | xm |
1
=
≤ am
(m + 1)!
m + 1 m!
2
Iterando, abbiamo allora am+2 ≤ am ( 21 )2 e in generale, per ogni h, am+h ≤ am ( 12 )h . Quest’ultima disuguaglianza
dimostra che la successione am+h tende a zero quando h tende a +∞, ovvero, in modo equivalente, che la successione
|x|n
tende a zero quando n tende a +∞.
n!
Pag. 48
Introduzione al calcolo differenziale
Federico Lastaria, Analisi e Geometria 1
Lo sviluppo in serie di Taylor di seno e coseno La stessa argomentazione che dimostra la
convergenza, su tutto l’asse reale, della serie esponenziale, continua a valere per gli sviluppi in serie
di Taylor delle funzioni seno e coseno, centrate in a = 0. Ad esempio, per ogni x reale e per ogni
intero positivo n, le derivate successive n-esime Dn sin sono uniformemente maggiorate dalla costante
M = 1. (Infatti le derivate successive di sin sono uguali, a meno del segno, a sin e cos, e quindi in
1 n
f (c)xn è minore o
valore assoluto sono ≤ 1). Quindi, nel caso dello sviluppo di f = sin, il resto n!
xn
uguale di n! , e abbiamo visto che tale successione tende a zero, qualunque sia x, quando n tende a
+∞. Lo stesso vale per la funzione cos. Pertanto valgono i seguenti sviluppi:
sin x
= x−
cos x
=
1−
+∞
X
x5
x7
(−1)n x2n+1
x3
+
−
··· =
3!
5!
7!
(2n + 1)!
n=0
(6.42)
+∞
X
x2
x4
x6
(−1)n x2n
+
−
··· =
2!
4!
6!
(2n)!
n=0
(6.43)
e questi sviluppi in serie di Taylor delle funzioni seno e coseno valgono per ogni x in IR.
La serie binomiale La generalizzazione della formula della potenza di un binomio a esponenti
arbitrari è stata una delle grandi scoperte matematiche di Newton. Vogliamo sviluppare la funzione
f (x) = (1 + x)α in serie di Taylor, dove x > −1 e α è un qualunque numero reale (positivo o negativo,
razionale o irrazionale). Calcoliamo le derivate successive di f (x):
f 0 (x)
00
f (x)
.....
f
(n)
(x)
= α(1 + x)α−1
(6.44)
α−2
= α(α − 1)(1 + x)
(6.45)
.........................................
(6.46)
α−n
= α(α − 1) · · · (α − n + 1)(1 + x)
(6.47)
In particolare, prendendo x0 = 0, abbiamo
f 0 (0) = α,
f 00 (0) = α(α − 1),
f (n) (0) = α(α − 1) · · · (α − n + 1)
Allora, per la formula di Taylor,
(1 + x)α = 1 + αx +
α(α − 1) · · · (α − n + 1) n
α(α − 1) 2
x + ···
x + Rn+1
2!
n!
Ora si dimostra che, al tendere di n a +∞, il resto Rn+1 tende a zero se |x| < 1, mentre non tende
a zero se |x| > 1. (Non diamo la dimostrazione di questo risultato). Introducendo il coefficiente
binomiale generalizzato
α
α(α − 1) · · · (α − n + 1)
=
n!
n
si ottiene allora lo sviluppo di (1 + x)α nella serie binomiale
(1 + x)
α
=
+∞ X
α
n=0
n
xn
(6.48)
che converge perøsolo se |x| < 1.
Pag. 49
Introduzione al calcolo differenziale
7
Federico Lastaria, Analisi e Geometria 1
Funzioni convesse
Definizione 7.1. Una funzione definita su un intervallo aperto I si dice:
• convessa, se per ogni coppia di punti x1 , x2 in I il segmento congiungente i punti
M = (x1 , f (x1 )) e N = (x2 , f (x2 )) sta al di sopra del grafico di f . In modo equivalente, se per
ogni x1 , x2 in I e per ogni coppia di numeri reali λ, µ ≥ 0, soddisfacenti λ + µ = 1, si ha:
f (λx1 + µx2 ) ≤ λf (x1 ) + µf (x2 )
(7.1)
• concava, se per ogni coppia di punti x1 , x2 in I il segmento congiungente i punti
M = (x1 , f (x1 )) e N = (x2 , f (x2 )) sta al di sotto del grafico di f . In modo equivalente, se per
ogni x1 , x2 in I e per ogni coppia di numeri reali λ, µ ≥ 0, soddisfacenti λ + µ = 1, si ha:
f (λx1 + µx2 ) ≥ λf (x1 ) + µf (x2 )
(7.2)
Se chiamiamo corda il segmento di estremi M , N e arco il grafico di f tra gli stessi estremi, possiamo
dire che una funzione continua definita su un intervallo si dice convessa se, in ogni sottointervallo,
la corda sta al di sopra dell’arco, mentre si dice concava se, in ogni sottointervallo, la corda sta al di
sotto dell’arco.
Una funzione convessa si dice strettamente convessa se, in ogni sottointervallo, arco e corda hanno
solo gli estremi in comune. In modo analogo si definisce una funzione strettamente concava.
N
M
0
Figure 4: Funzione concava: la corda sta tutta al di sotto dell’arco.
M
N
0
Figure 5: Funzione convessa: la corda sta tutta al di sopra dell’arco.
Pag. 50
Introduzione al calcolo differenziale
Esempi.
è convessa.
Federico Lastaria, Analisi e Geometria 1
La funzione f (x) = |x|, x ∈ R, è convessa (su R). Anche la funzione g(x) = x2 , R −→ R,
Osservazione. Una funzione convessa su un intervallo I, può non essere derivabile, come risulta
f
dall’esempio x 7−→ |x|, x ∈ R. Ma si dimostra che se I è un intervallo aperto e I −→ R è convessa
su I, allora le derivate sinistre e le derivate destre esistono in ogni punto di I. Di conseguenza, una
funzione convessa su un intervallo aperto è continua. (Invece una funzione f convessa su un intervallo
[a, b] può non essere continua in a o in b, come si vede facilmente con un esempio).
Per le funzioni derivabili, la convessità si può formulare anche in un altro modo. (La dimostrazione
è semplice, ma non la riportiamo).
Teorema 7.2. Condizione necessaria e sufficiente perché una funzione f , derivabile in tutto un
intervallo [a, b], sia convessa è che la retta tangente al grafico in un suo qualsiasi punto stia tutta al
di sotto del grafico.
0
Figure 6: Funzione convessa: il grafico sta tutto al di sopra della retta tangente.
Pag. 51
Introduzione al calcolo differenziale
7.1
Federico Lastaria, Analisi e Geometria 1
Interpretazione del segno della derivata seconda
Teorema 7.3. Supponiamo che f sia derivabile due volte su un intervallo aperto I. Se per ogni x ∈ I
si ha f 00 (x) ≥ 0, allora f è convessa.
Dimostrazione. Per dimostrare che f è convessa, ricorriamo al teorema precedente e dimostriamo
che, per ogni punto (x0 , f (x0 )) del grafico di f , il grafico si trova tutto al di sopra della retta tangente
in tale punto. Sia dunque x0 un punto in I. Prendiamo un qualunque punto x ∈ I. Poiché f è due
volte derivabile, possiamo scrivere la formula di Taylor arrestata al secondo ordine, con centro in x0 :
f (x) = f (x0 ) + f 0 (x0 )(x − x0 ) +
f 00 (c)
(x − x0 )2
2
(7.3)
per un opportuno punto c compreso21 tra x e x0 . Allora
f (x) − [f (x0 ) + f 0 (x0 )(x − x0 )] =
f 00 (c)
(x − x0 )2 ≥ 0
2
(7.4)
perché (x − x0 )2 ≥ 0 e f 00 (c) ≥ 0 per ipotesi. Dunque il primo membro della 7.4 è maggiore o uguale
a zero, ossia
f (x)
≥ f (x0 ) + f 0 (x0 )(x − x0 )
(7.5)
{z
}
|{z}
|
Ordinata sul grafico di f
Ordinata sulla retta tangente
0
Si noti infatti che y = f (x0 ) + f (x0 )(x − x0 ) è l’equazione della retta tangente al grafico di f nel punto
(x0 , f (x0 )). Abbiamo cosı̀ dimostrato che il grafico di f sta tutto al di sopra della retta tangente nel
punto (x0 , f (x0 )).
f
Definizione 7.4 (Punto di flesso). Sia I −→ R una funzione definita su un intervallo aperto I ⊂ R.
Un punto x0 si dice punto di flesso per f se è estremo comune di due intervalli, su uno dei quali la
funzione è convessa, e sull’altro concava.
Osservazione.
Se f è una funzione due volte derivabile sull’intervallo aperto I e x0 ∈ I,
l’annullarsi della derivata seconda, f 00 (x0 ) = 0, è condizione necessaria perché x0 sia un punto di flesso
per f . La condizione non è però sufficiente, come è evidente dall’esempio f (x) = x4 . Per decidere se
un punto x0 , in cui la derivata seconda si annulla, sia un punto di flesso, converrà esaminare il segno
della derivata seconda in un intorno sinistro e il segno in un intorno destro di x0 . Se questi segni sono
diversi, siamo in presenza di un punto di flesso, altrimenti no.
Esempio. La funzione f (x) = x3 ha un punto di flesso in x0 = 0, perché la derivata seconda
f (x) = 6x è negativa in un intorno sinistro e positiva in un intorno destro di 0.
00
21 Quando diciamo che c è compreso tra x e x intendiamo dire che x < c < x se x < x , mentre x < c < x se
0
0
0
0
x0 < x.
Pag. 52