22/12/2011
Corso Di Formazione In
Smart Grid Per La Gestione
Efficiente Delle Risorse
Energetiche
22 dicembre 2011
Wide Area
Measurement
Ing. Maurizio Spadavecchia
Gruppo Misure elettriche ed Elettroniche –
Politecnico di Bari
2
Agenda
Introduzione
Limiti delle tecnologie SCADA
Wide Area Measurement System
Applicazioni dei WAMS
Architettura WAMS e PMU
I sincrofasori
PMU: Standard IEEE C37-118:2005
Stima dei sincrofasori
Sincronizzazione
Affidabilità e Accuratezza
Requisiti delle applicazioni
Sistemi di comunicazione
Panoramica sui prodotti
1
22/12/2011
3
Agenda
Introduzione
Limiti delle tecnologie SCADA
Wide Area Measurement System
Applicazioni dei WAMS
Architettura WAMS e PMU
I sincrofasori
PMU: Standard IEEE C37-118:2005
Stima dei sincrofasori
Sincronizzazione
Affidabilità e Accuratezza
Requisiti delle applicazioni
Sistemi di comunicazione
Panoramica sui prodotti
Introduzione
4
Le Smart Grids necessitano di tecnologie “multi‐agent” che
inevitabilmente provocheranno un drastico cambiamento nella
gestione delle reti a qualsiasi livello di tensione.
2
22/12/2011
Introduzione
5
Reti elettriche attive di trasmissione: reti di trasmissione in cui i sistemi
di generazione, da fonti rinnovabili (e non), e accumulo sono
controllati da opportuni sistemi di gestione al fine di raggiungere
specifici obiettivi d’esercizio
6
Introduzione
I problemi/obiettivi che il controllo ed esercizio delle
Smart Grid si propongono di affrontare sono:
generazione non-prevedibile;
gestione dell’accumulo;
monitoraggio in tempo reale e stima dello stato;
ridefinizione dei livelli gerarchici di controllo;
partecipazione attiva degli utenti nella rete;
Power Quality;
controllo delle protezioni;
condizioni di emergenza (guasti, blackout, isole di
carico);
vincoli derivanti da esigenze locali.
3
22/12/2011
Introduzione
7
Il sistema elettrico è sempre più sollecitato a funzionare
con minori margini di sicurezza; i fattori critici sono:
lo sviluppo delle interconnessioni che crea
una rete caratterizzata da dinamiche
complesse
l'introduzione del mercato elettrico, che
comporta ingenti trasferimenti di potenza fra
aree e nuove configurazioni di esercizio, non
concepite per garantire la sicurezza
il carico della rete aumenta senza che il
sistema di trasmissione sia potenziato
Introduzione
8
Situazione: aumento delle connessioni di sistemi di
generazione di piccola e media taglia alle reti elettriche di
distribuzione sia bt che MT.
Obiettivo: Sviluppare sistemi distribuiti di monitoraggio in
tempo reale in grado di fornire informazioni utili alla gestione
di queste reti in condizioni normali e di emergenza
4
22/12/2011
9
Introduzione
Fattori critici:
Incertezza nella conoscenza del comportamento
(modello) del sistema
Imprecisione e i ritardi con cui l'andamento della
rete è seguito in sala controllo
Scarsa confidenza nell'efficacia puntuale di azioni
di controllo, sia automatiche sia manuali, da
assumere in condizioni che sconfinano
nell'emergenza
Il sistema attualmente viene esercito
conservativamente, senza garantire in ogni
circostanza il livello di affidabilità richiesto.
10
Agenda
Introduzione
Limiti delle tecnologie SCADA
Wide Area Measurement System
Applicazioni dei WAMS
Architettura WAMS e PMU
I sincrofasori
PMU: Standard IEEE C37-118:2005
Stima dei sincrofasori
Sincronizzazione
Affidabilità e Accuratezza
Requisiti delle applicazioni
Sistemi di comunicazione
Panoramica sui prodotti
5
22/12/2011
SCADA
11
Importanza di conoscere il modello del sistema
elettrico
pianificazione della rete e dei sistemi di controllo e
protezione, per definire le caratteristiche degli
elementi in modo che si integrino con l'esistente
senza introdurre situazioni a rischio di instabilità;
programmazione dell'esercizio, per verificare
mediante simulazione i margini di sicurezza delle
situazioni previste.
In sala controllo, l'operatore dispone di un simulatore
collegato on-line con lo SCADA per controllare durante
l'esercizio la stabilità di possibili perturbazioni.
12
SCADA
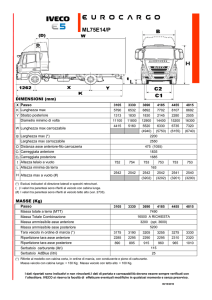
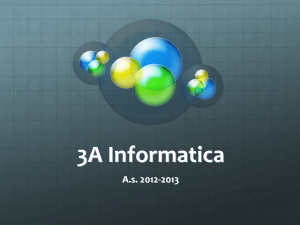
La simulazione, soprattutto dinamica, presenta tuttavia
aspetti significativi di debolezza:
Elevati tempi di
risposta;
la ridotta confidenza
sull'accuratezza del
modello.
Power swings on total California-Oregon
Interconnection (COI) for WSCC breakup of August
10, 1996. Standard WSCC model vs. WAMS monitor
data
6
22/12/2011
SCADA
13
I sistemi di misura "tradizionali", basati su SCADA, come
pure la simulazione nel dominio del tempo possono
dimostrarsi inadeguati a rilevare tali problemi
Ritardi e imprecisioni
Frequenza di aggiornamento nell’ordine dei
secondi
Poche grandezze di interesse (asincrone)
Tutto ciò introduce errori ed imprecisioni nella stima dello
stato statico del sistema, quindi aumenta l’incertezza sui
risultati delle analisi di sicurezza.
14
SCADA
A causa di queste incertezze c'è il rischio che il
sistema elettrico si comporti in modo diverso dalle
aspettative
I sistemi di controllo (manuali o SPS) , tarati fuori
linea,
potrebbero
comportarsi
in
modo
indesiderato in condizioni specifiche, non previste
durante il progetto
Gli interventi dovrebbero essere accuratamente
calibrati sulle condizioni e sull'evoluzione attuale
del sistema
Alcuni sistemi di controllo ordinari, come i segnali
stabilizzanti dei generatori (PSS), possono risultare
inadeguati per contrastare fenomeni di ampia
scala (oscillazioni interarea)
7
22/12/2011
15
Agenda
Introduzione
Limiti delle tecnologie SCADA
Wide Area Measurement System
Applicazioni dei WAMS
Architettura WAMS e PMU
I sincrofasori
PMU: Standard IEEE C37-118:2005
Stima dei sincrofasori
Sincronizzazione
Affidabilità e Accuratezza
Requisiti delle applicazioni
Sistemi di comunicazione
Panoramica sui prodotti
16
Wide Area Measurement
Affidabilità della rete in
condizioni dinamiche
Monitoraggio Real-time
Funzioni di analisi evolute
Integrazione
monitoraggio/controllo
8
22/12/2011
WAMS
17
Nelle reti elettriche di trasmissione il monitoraggio è realizzato
tramite i cosiddetti WAMS basati sulla misura dei sincrofasori
delle tensioni nodali mediante le Phasor Measurement Unit
(PMU).
WAMS
18
Caratteristiche:
Rendono disponibili misure accurate e
sincronizzate per l'analisi off-line, ma anche in
tempo reale.
monitoraggio più completo
i sistemi di controllo possono efficacemente
contrastare i problemi "globali" ricevendo come
input segnali "globali".
Si cerca di garantire la sicurezza agendo su due
fronti: da una parte, rilevare in tempo i fenomeni;
dall'altra, impedire ai disturbi di propagarsi
9
22/12/2011
19
Agenda
Introduzione
Limiti delle tecnologie SCADA
Wide Area Measurement System
Applicazioni dei WAMS
Architettura WAMS e PMU
I sincrofasori
PMU: Standard IEEE C37-118:2005
Stima dei sincrofasori
Sincronizzazione
Affidabilità e Accuratezza
Requisiti delle applicazioni
Sistemi di comunicazione
Panoramica sui prodotti
20
WAMS: Applicazioni
Monitoraggio diretto dei flussi di potenza attiva e
reattiva e degli angoli di fase
Monitoraggio della stabilità di tensione
Monitoraggio dei corridoi
Monitoraggio delle oscillazioni wide area
Monitoraggio termico delle linee
Monitoraggio della stabilità di frequenza
Identificazione dell’andata in isola
Monitoraggio della stabilità transitoria.
10
22/12/2011
21
WAMS: Applicazioni
Sistem Power
Management
Acquisizione Dati
Analisi
Post Disturbo
Analisi dei risultati,
validazione di
modelli, Piani di
difesa
Soglie di SPS
Esercizio (elaborazione real time)
Programmazione d’esercizio (dinamica e
prestazioni)
Pianificazione (fedeltà dei modelli e punti di
debolezza)
22
WAMS: Applicazioni
Sistem Power
Management
Acquisizione Dati
Analisi
Post Disturbo
Analisi dei risultati,
validazione di
modelli, Piani di
difesa
Soglie di SPS
Stima dello stato "assistita con gli angoli"
Valutazione del grado di sollecitazione del sistema e dei
margini di stabilità - allarmistica per l'operatore
Determinazione in tempo reale delle capacità di trasporto dei
corridoi
Individuazione e monitoraggio di punti critici
Individuazioni di oscillazioni inter-area
Supporto alla risoluzione di congestioni
Ausilio in fase di ripristino, anche mediante librerie e
applicazioni di intelligenza artificiale
Supervisione e input di sistemi di controllo e protezione: per
esempio segnali per armare e attivare gli SPS.
11
22/12/2011
23
WAMS: Applicazioni
Sistem Power
Management
Acquisizione Dati
Analisi
Post Disturbo
Individuazione
Analisi dei risultati,
validazione di
modelli, Piani di
difesa
Soglie di SPS
delle cause di oscillazioni.
24
WAMS: Applicazioni
Sistem Power
Management
Acquisizione Dati
Analisi
Post Disturbo
Analisi dei risultati,
validazione di
modelli, Piani di
difesa
Soglie di SPS
Valutazione delle prestazioni dei componenti, in
particolare dei generatori
Individuazione di malfunzionamenti dei componenti
Raccolta dati per la descrizione o la validazione dei
modelli, per esempio di macchine e carico
Analisi e correzione delle impostazioni dei sistemi di
protezione
valutazione delle inadeguatezze nei controlli
Riduzione del rischio di malfunzionamenti ricorrenti.
Analisi di transitori
12
22/12/2011
25
WAMS: Applicazioni
Sistem Power
Management
Acquisizione Dati
Analisi
Post Disturbo
Impostazione
speciali (SPS).
Analisi dei risultati,
validazione di
modelli, Piani di
difesa
Soglie di SPS
di sistemi di protezione
26
WAMS: Accezioni
Attuale
Futuro
Applicazione
Uso
Analisi dei
dati
Sorgente di dati
per analisi postevento
Protezione e
Automazione
Real-Time
Misurare la
stabilità della
rete e controllo
in retroazione
Wide Area Monitoring and Control Systems (WAMCS) o
WACS
input agli schemi di protezione speciale (SPS)
funzioni avanzate di controllo
funzioni avanzate di protezione e difesa
separazione (andata in isola) controllata
funzioni per consentire un migliore sfruttamento del
sistema di trasmissione.
13
22/12/2011
27
Agenda
Introduzione
Limiti delle tecnologie SCADA
Wide Area Measurement System
Applicazioni dei WAMS
Architettura WAMS e PMU
I sincrofasori
PMU: Standard IEEE C37-118:2005
Stima dei sincrofasori
Sincronizzazione
Affidabilità e Accuratezza
Requisiti delle applicazioni
Sistemi di comunicazione
Panoramica sui prodotti
28
WAMS: Architettura
14
22/12/2011
PMU
29
Phasor Measurement Unit (PMU): dispositivi
digitali atti a fornire misure di fasori
sincronizzati a partire da ingressi di tensione
e/o di corrente, tramite un segnale
sincronizzante
Sincronizzando i processi di campionamento
per diversi segnali, distanti anche centinaia di
chilometri fra loro, si possono riprodurre le
grandezze su uno stesso diagramma fasoriale
Le misure fasoriali sono ottenute
individualmente per ciascuna fase,
solitamente solo per quanto concerne la
sequenza diretta.
30
PMU
Una frequenza di campionamento tipica è di 12 campioni
per ciclo (pari a 720 Hz in sistemi con frequenza nominale di
60 Hz), ma si possono raggiungere valori anche
quadruplicati (2880 Hz)
15
22/12/2011
31
Agenda
Introduzione
Limiti delle tecnologie SCADA
Wide Area Measurement System
Applicazioni dei WAMS
Architettura WAMS e PMU
I sincrofasori
PMU: Standard IEEE C37-118:2005
Stima dei sincrofasori
Sincronizzazione
Affidabilità e Accuratezza
Requisiti delle applicazioni
Sistemi di comunicazione
Panoramica sui prodotti
32
Fasori
Una forma d’onda sinusoidale può essere espressa nella
forma:
x(t ) X m cos(t )
Xm è l’ampiezza della
sinusoide;
ω è la pulsazione
φ è la fase iniziale
Eulero
X m cos(t ) X m e jt e j
Se abbiamo a che fare con grandezze
isofrequenziali possiamo metterci su un piano
rotante alla velocità ω allora riusciamo a
liberarci
della
dipendenza
dal
tempo
ottenendo la rappresentazione fasoriale
x(t) Xejφ X
X
Xm
2
16
22/12/2011
33
I sincrofasori
Sincro-fasori: la dipendenza dal tempo non è relativa
(a partire dall’istante di acquisizione) ma riferita ad
un tempo assoluto.
Il tempo a cui ci si riferisce è l’UTC (Coordinated
Universal Time)
I sincrofasori sono riferiti alla funzione cosinusoidale
34
I sincrofasori
17
22/12/2011
35
I sincrofasori
La rappresentazione fasoriale di una sinusoide è
indipendente dalla sua frequenza.
Supponiamo che la sinusoide sia osservata ad
intervalli di tempo {0, T0, 2T0, 3T0,…}, i fasori stimati
saranno {X0, X1, X2,…}
T0 N
1
f
N = 1, 2, 3,…
il fasore ottenuto è costante
ad ogni osservazione
36
I sincrofasori
T0 N
1
f
Ampiezza
costante
La fase ad ogni osservazione
N = 1, 2, 3,…
2
f f0
f0
18
22/12/2011
37
Agenda
Introduzione
Limiti delle tecnologie SCADA
Wide Area Measurement System
Applicazioni dei WAMS
Architettura WAMS e PMU
I sincrofasori
PMU: Standard IEEE C37-118:2005
Stima dei sincrofasori
Sincronizzazione
Affidabilità e Accuratezza
Requisiti delle applicazioni
Sistemi di comunicazione
Panoramica sui prodotti
38
PMU: IEEE C37-118:2005
WHY?
Garantire
l’integrazione In sistemi
multivendor
Uniformare il formato
dell’output
Garantire la
conformità tra le
misure
Interscambiabilità dei dati tra
sistemi diversi sia in tempo
reale che off-line.
19
22/12/2011
39
PMU: IEEE C37-118:2005
WHAT?
Definizioni
Metodi di tagging e
sincronizzazione
Stima dei sincrofasori
Limiti di accuratezza
Test di conformità
Protocollo di
comunicazione
Formato dei dati
40
PMU: IEEE C37-118:2005
L’informazione sul tempo viene rappresentata da un
Timestamp che è un messaggio composto da 8 byte:
SOC (Second Of Century): 4 byte che è un
numero che rappresenta in secondi trascorsi dal 1
gennaio 1970
FRACSEC (Fraction of Second): 3 byte che
possono rappresentare fino a 1/16.777.216
secondi (circa 59.6 ns)
TQ (Time Quality): 1 byte che contiene
l’informazione sullo stato e accuratezza della
sorgente di clock e una indicazione del secondo
Intercalare.
20
22/12/2011
41
PMU: IEEE C37-118:2005
Il segnale di riferimento temporale al quale lo
standard fa riferimento per la valutazione dei
fasori sincronizzati è l’UTC.
il segnale di sincronizzazione deve avere livelli
di affidabilità e di accuratezza idonei al
soddisfacimento dei requisiti di misura richiesti
nei sistemi elettrici.
Un errore sul tempo di 1 µs corrisponde ad un
errore sulla stima della fase di 0.0022° a 60Hz e
di 0.0018° a 50 Hz
42
PMU: IEEE C37-118:2005
La stima del sincrofasore viene restituita
sotto
forma
di
dataframes
ovvero
pacchetti che contengono più dati stimati
ad una frequenza Fs detta DATA_RATE
Se DATA_RATE = 15 il PMU trasmette 15 frame al secondo
Se DATA_RATE = -5 IL PMU trasmette 1 frame ogni 5 s
I frame (sincrofasori) sono normalmente
equispaziati in una finestra di durata 1
secondo.
21
22/12/2011
43
PMU: IEEE C37-118:2005
Lo standard non fornisce alcuna precisazione riguardo gli
algoritmi per la valutazione dei fasori sincronizzati!
Stabilisce delle precise indicazioni riguardo la gestione e la
trasmissione dei dati, in modo da garantire la correlazione
di grandi quantità di dati provenienti da differenti unità
PMU.
Queste frequenze di stima non sempre sono sufficienti a
descrivere fenomeni molto veloci.
44
PMU: IEEE C37-118:2005
Reporting rates è in pratica il numero di fasori stimati
al secondo
La seconda stima accadrà dopo 1/60 s ovvero
quando FRASEC =16.777.216/60.
22
22/12/2011
45
PMU: IEEE C37-118:2005
Il reporting rate delle misure deve consentire di
seguire i fenomeni di interesse senza introdurre
effetti di aliasing
Per misurare le dinamiche aperiodiche, il
reporting rate dell’output non può essere
superiore
della
più
piccola
costante
temporale di interesse.
Per misurare fenomeni oscillatori, il reporting
rate dell’output deve essere almeno il doppio
della massima frequenza delle oscillazioni di
interesse.
46
PMU: IEEE C37-118:2005
La misura di un sincrofasore deve essere
caratterizzata da una certa accuratezza nella
stima dell’ampiezza e della fase in un ampio
range di condizioni operative.
Le applicazioni di monitoraggio e controllo WIDE
AREA elaborano i dati fasoriali provenienti dagli
apparati PMU e producono informazioni sullo stato
della RETE
L’accuratezza dei risultati dipende da quella delle
misure in ingresso e dalla funzione che le elabora.
Definiti i requisiti di accuratezza dell’uscita, è
possibile risalire a quelli sulle misure fasoriali in
ingresso.
23
22/12/2011
47
PMU: IEEE C37-118:2005
Risoluzione è la minima variazione di una grandezza
misurata (in input) necessaria a produrre una variazione
quantificabile della misura in uscita (in output).
Accuratezza è il grado di conformità di una quantità
misurata o calcolata con il suo valore vero, cioè il grado di
correttezza, della quantità misurata.
Precisione è il grado di riproducibilità della misurazione,
cioè il grado per cui più misurazioni di una grandezza che
ha un certo valore teorico sono uguali o simili fra loro.
48
PMU: IEEE C37-118:2005
Lo
standard IEEE C37.118 specifica solo un
requisito di accuratezza anche se il
concetto di incertezza sarebbe più
corretto.
Perciò
l’accuratezza è da considerare
come il massimo errore atteso sul fasore.
X r ( n) X r X i ( n ) X i
2
TVE
X r2 X i2
2
Total Vector Error
24
22/12/2011
49
PMU: IEEE C37-118:2005
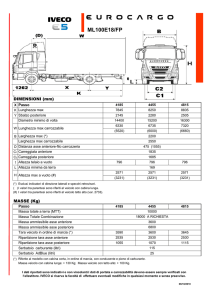
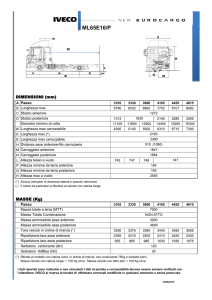
In pratica TVE è l’ampiezza del vettore differenza tra il fasore
teorico e quello misurato divisa per l’ampiezza del fasore
teorico.
Se la frequenza valutata
dall’unità PMU coincide
con quella nominale, la
rappresentazione fasoriale
risulterà essere di tipo
stazionario.
In presenza di uno
scostamento tra il valore
teorico della frequenza del
segnale e quello reale,
sarà invece possibile
osservare la rotazione del
fasore sul piano
complesso.
Misure Compatibili
TVE rappresenta un indice caratteristico di queste oscillazioni ed
il suo valore risulta proporzionale all’entità di questi scostamenti
50
PMU: IEEE C37-118:2005
Lo standard definisce 2 livelli di conformità
25
22/12/2011
51
PMU: IEEE C37-118:2005
-1%
-0,57°
1%
0,57°
52
PMU: IEEE C37-118:2005
26
22/12/2011
53
PMU: IEEE C37-118:2005
TVE è il massimo errore che possiamo
compiere sulla stima
dV V ·TVE
dv , d I TVE
Da
queste relazioni possiamo determinare i
limiti di accuratezza della stima delle varie
grandezze derivate dai fasori di tensione e
corrente
54
PMU: IEEE C37-118:2005
Consideriamo un sistema trifase in stato stazionario. La potenza in un ramo è:
P Va I a cos a Vb I b cos b Vc I c cos c
x a ,b , c
Vx I x cos x
x a ,b , c
Vx I x cos(V x I x )
P
P
P
P
dP dpx x dVx x dI x x dV x x d I x
I x
Vx
Vx
x
x Vx
Nel caso peggiore possiamo scrivere:
dPx Vx I x cos x TVE Vx I x cos x TVE
Vx I x sin x TVE Vx I x sin x TVE
dPx 2 Px 1 tan x
2 Px TVE 2Qx TVE
L’accuratezza relativa risulta dunque:
dPx
2 TVE 1 tan x
Px
27
22/12/2011
55
56
PMU: IEEE C37-118:2005
Lo standard si riferisce a condizioni stazionarie
Tutti gli strumenti vengono calibrati e testati
con segnali costanti
I segali reali hanno una componente
aleatoria
Le variazioni in gioco sono piccole
La prestazioni del PMU in regime transitorio
vengono ottenute attraverso il passaggio tra
più stati stazionari (risposta al gradino)
28
22/12/2011
57
Agenda
Introduzione
Limiti delle tecnologie SCADA
Wide Area Measurement System
Applicazioni dei WAMS
Architettura WAMS e PMU
I sincrofasori
PMU: Standard IEEE C37-118:2005
Stima dei sincrofasori
Sincronizzazione
Affidabilità e Accuratezza
Requisiti delle applicazioni
Sistemi di comunicazione
Panoramica sui prodotti
58
Stima dei sincrofasori
Gli algoritmi tipicamente implementati nelle PMU sono
basati sull’impiego della trasformata discreta di Fourier
(Discrete Fourier Transform – DFT. Tali algoritmi sono
classificati:
stime a singolo ciclo (one-cycle DFT estimators)
a ciclo frazionario (fractional cycle DFT estimators)
Entrambi in grado di effettuare misure ricorsive e
non ricorsive
Stima del fasore fatta su un periodo
N
1
2
2
j ( k 1 2)
2
N
ˆ
X
x (k 1 2) Tc e
N k N
2
29
22/12/2011
59
Stima dei sincrofasori
N
1
2
2
j ( k 1 2)
N
ˆ 2 x (k 1 2) T e
X
c
N k N
2 f
j ( k 1/ 2)
N f nom
x (k 1/ 2)Tc 2 X e
2
Sostituendo questa equazione nel modello del segnale
cosinusoidale.
f
sin
1
*
f
ˆ A X B X
nom
X
A
f
N sin
1
N
f
nom
• f = fnom allora A = 1 e B=0
Non ci sono errori di guadagno
o fase
f
sin
1
f nom
B
2 f
N sin
1
N N f nom
60
Stima dei sincrofasori
N
1
2
2
j ( k 1 2)
N
ˆ 2 x (k 1 2) T e
X
c
N k N
2
2 f
j ( k 1/ 2)
N f nom
x (k 1/ 2)Tc 2 X e
Sostituendo questa equazione nel modello del segnale
cosinusoidale.
f
sin
1
*
ˆ A X B X
f nom
X
A
f
N sin
1
N f nom
f ≠ fnom allora A diminuisce
• Se f <fnom allora B > 0
f
sin
1
• Se f <fnom allora B < 0
f
nom
B
2 f
Errore di guadagno e distorsione
N sin
1
N
N
f
nom
30
22/12/2011
61
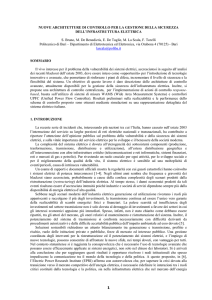
Stima dei sincrofasori
ˆ A X B X*
X
L’eccentricità
dell’ellisse aumenta
quanto più aumenta
la differenza tra le
frequenze
Risposta per un segnale di ingresso a 55 Hz
62
Stima dei sincrofasori
Il campionamento
per
il teorema di Nyquist-Shannon, per
campionare un segnale senza perdita di
informazione, bisogna campionarlo con
frequenza almeno doppia rispetto alla
frequenza della massima componente
spettrale del segnale informativo
Se
non viene rispettato tale teorema, cioè
si ha un sottocampionamento del segnale
31
22/12/2011
63
Stima dei sincrofasori
Il campionamento: l’aliasing
64
Stima dei sincrofasori
segnali fuori banda
tipicamente
presenti nel range
[0-60] Hz
quelli introdotti
quando la
frequenza delle
stime è troppo
bassa confronto
alla dinamica del
fenomeno
32
22/12/2011
65
Agenda
Introduzione
Limiti delle tecnologie SCADA
Wide Area Measurement System
Applicazioni dei WAMS
Architettura WAMS e PMU
I sincrofasori
PMU: Standard IEEE C37-118:2005
Stima dei sincrofasori
Sincronizzazione
Affidabilità e Accuratezza
Requisiti delle applicazioni
Sistemi di comunicazione
Panoramica sui prodotti
66
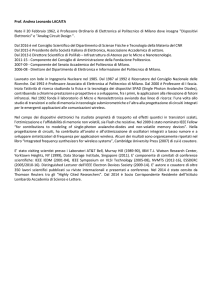
Sincronizzazione
il segnale di riferimento UTC in genere viene prodotto da un
segnale chiamato 1PPS fornito da un GPS. La finestra di
acquisizione è centrata sul fronte di salita di questo impulso
33
22/12/2011
67
Sincronizzazione
24 campioni
24 campioni
Alstom P420ENa
20 ms
Errore di fase
Misurato con clock interno a 37.5 MHz
68
Sincronizzazione
Caratteristiche di una sorgente sincronizzante
per WAMS
Affidabilità
Accuratezza
Accessibilità
Sistema
di trasmissione globale
(GPS)/clock interno o esterno
•
ET errore di
temporizzazione o
timing error di un clock
interno
ET Es Ri Ac
•
•
Es rappresenta il
“massimo errore” del
segnale sincronizzante,
Ri l’intervallo di
ripetizione
Ac l’accuracy relativa
del clock di misura
(secondi/secondo).
34
22/12/2011
69
Sincronizzazione
Sistemi satellitari
Sistemi terrestri
• L’unico sistema di
sincronizzazione
effettivamente utilizzabile
sia costituito dal sistema
globale GPS
• notevoli riduzioni nei costi
di sistema
• le accuratezze dei segnali
di sincronizzazione
ottenibili mediante
• I sistemi satellitari di nuova
l’impiego di tali sistemi
(ad esempio trasmissioni
generazione, tra cui
AM) risultano sicuramente
GALILEO, diventeranno
pienamente operativi
limitate
solamente tra qualche
anno
• i livelli di affidabilità e di
disponibilità risultano
attualmente modesti
• le prestazioni ottenibili
mediante questi sistemi
dovranno inoltre essere
attentamente valutate.
70
Agenda
Introduzione
Limiti delle tecnologie SCADA
Wide Area Measurement System
Applicazioni dei WAMS
Architettura WAMS e PMU
I sincrofasori
PMU: Standard IEEE C37-118:2005
Stima dei sincrofasori
Sincronizzazione
Affidabilità e Accuratezza
Requisiti delle applicazioni
Sistemi di comunicazione
Panoramica sui prodotti
35
22/12/2011
Accuratezza
71
L’accuratezza dell’output dei PMU è influenzata da tutti i
dispositivi e processi coinvolti nella catena di misura
trasformatori di misura
i cavi
i convertitori A/D
gli algoritmi di analisi dei segnali
errori dovuti alla sincronizzazione temporale
Accuratezza
72
TVE = 1% massimo errore di di 0.01 rad = 0.57°.
ch T
Δϕch è l’errore d’angolo stimato dovuto alla catena
di misura
T ET
ΔϕT è il contrinuto della sincronizzazione temporale
Trascurando l’errore sull’ampiezza, il TVE può essere valutato
come
TVE % 100 [rad ] 100 (ch [deg] ET [ s ] [deg/ s ])[deg] 57.296
Dalla tabella precedente segue che il massimo errore possibile
per ΔϕT è 0.57° – 0.4° = 0.17°.
Da cui Et vale 9.4 µs a 50 Hz e di 7.8 µs a 60 Hz.
Per tener conto di altri errori, l’accuratezza sulla sincronizzazione
temporale è generalmente posto conservativamente a 1 µs.
36
22/12/2011
73
Accuratezza:
errore di fase
ritardo (latency) fra l'istante di misurazione e quello in cui la
misura è resa disponibile
Spesso costituisce il ritardo dominante di un anello di controllo
dipende dalla somma dei ritardi nella catena di misura,
elaborazione, trasmissione
Il primo contributo è dovuto al tempo necessario per la
valutazione dei fasori
ritardi ulteriori dovuti a filtraggio ed elaborazione del segnale
tempo impiegato per trasmettere i dati da PMU a PDC
tempo occorrente al PDC per produrre i dati per
l'applicazione
ritardi addizionali per il regolatore, le comunicazioni e
l'attuatore
I tempi totali di funzionamento per le applicazioni di controllo wide
area variano da 150 a 300 ms.
Linee di trasmissione dedicate per il trasferimento di informazioni
importanti per garantire tempi di trasmissione di 30¸50 ms.
74
Agenda
Introduzione
Limiti delle tecnologie SCADA
Wide Area Measurement System
Applicazioni dei WAMS
Architettura WAMS e PMU
I sincrofasori
PMU: Standard IEEE C37-118:2005
Stima dei sincrofasori
Sincronizzazione
Affidabilità e Accuratezza
Requisiti delle applicazioni
Sistemi di comunicazione
Panoramica sui prodotti
37
22/12/2011
75
Requisiti Applicazioni
I fenomeni o eventi critici e le loro conseguenze
sul sistema elettrico possono essere classificati in
riferimento a diversi aspetti:
la scala temporale adottata (da frazioni di
secondo a ore)
le grandezze fisiche ed elettriche considerate
(tensioni, corrente frequenza e fase)
gli elementi del sistema elettrico di cui si
considera la stabilità o l’integrità
In base ai fenomeni legati a processi o
gestione
76
Requisiti applicazioni
38
22/12/2011
77
Requisiti applicazioni
Le instabilità d’angolo hanno scale temporali
dell’ordine dei secondi
instabilità
d’angolo dei rotori dei
generatori
oscillazioni elettromeccaniche non
smorzate o scarsamente smorzate
accelerazione monotona dei rotori che
porta a una perdita di sincronismo
instabilità di tensione di breve termine
dovuta alla dinamica dei carichi
78
Requisiti applicazioni
Le instabilità d’angolo hanno scale temporali
dell’ordine dei secondi
Stabilità Ocillatoria
Capacità del sistema a mantenere il sincronismo
quando è soggetto a piccoli disturbi (fluttuazioni di
carico)
0.1-1Hz per le oscillazioni inter-area
0.8-2 Hz per le oscillazioni locali (un impianto rispetto al
sistema).
Stabilità transitoria
Capacità a mantenere il sincronismo quando esso è
sottoposto a disturbi transitori severi (come un corto
circuito).
Centinaia di millisecondi
La rappresentazione completa della dinamica elettromeccanica
richiede un reporting rate fino a 1 / (20 ms) = 50 misure al secondo.
39
22/12/2011
79
Requisiti applicazioni
Le instabilità di frequenza hanno normalmente tempistiche
dell’ordine di diversi minuti e sono dovute e sbilanciamenti
nella potenza attiva tra i generatori e i carichi.
disturbi susseguenti alla “messa in isola” di aree del
sistema elettrico
La formazione di un’isola in deficit di produzione può
causare un rapido degrado della frequenza di rete
(instabilità di frequenza a breve termine), con
conseguente rischio, nel giro di pochi secondi, di un
rapido collasso di frequenza e di black-out di tutta
l’area rimasta isolata
Il monitoraggio della frequenza richiede lo stesso
reporting rate necessario per la stabilità transitoria, e cioè
50 misure al secondo
80
Requisiti applicazioni
L’instabilità della tensione lenta (voltage
instability)
aumento
dei carichi
interruzioni delle connessioni
diminuzione delle risorse di potenza reattiva
Breve
termine
Scala
Temporale
millisecondi
Reporting
Rate
50 misure al
secondo
Medio
Termine
secondi
Lungo
termine
minuti
1 misura al secondo
40
22/12/2011
81
Agenda
Introduzione
Limiti delle tecnologie SCADA
Wide Area Measurement System
Applicazioni dei WAMS
Architettura WAMS e PMU
I sincrofasori
PMU: Standard IEEE C37-118:2005
Stima dei sincrofasori
Sincronizzazione
Affidabilità e Accuratezza
Requisiti delle applicazioni
Sistemi di comunicazione
Panoramica sui prodotti
82
Sistemi di comunicazione
I canali di comunicazione impiegabili per i WAMS sono:
linee
telefoniche
microonde (sistemi analogici o digitali)
fibre ottiche
L'affidabilità e le prestazioni diventano critiche,
quando il WAMS fornisce input a sistemi di controllo e
protezione
Sistemi digitali come la fibra ottica sono molto più
veloci di quelli analogici via modem
In generale i ritardi ammissibili sono molto bassi se
confrontati con quelli di un sistema SCADA.
41
22/12/2011
83
Sistemi di comunicazione
Le applicazioni, per il monitoraggio, controllo e protezione
della Rete che pongono requisiti più stringenti sul sistema di
comunicazione possono essere classificate secondo lo
schema seguente:
Supervisione e Controllo locale o remoto della
stazione
Analisi dei dati
Protezione e automazione di stazione real time
Gestione della stazione
Gestione delle attività di manutenzione
Sicurezza
84
Sistemi di comunicazione
I dati trasmessi dai PMU confluiscono in una unità centrale
di elaborazione (PDC) che da un lato comunica con i
dispositivi a livello di sottostazione e montante e dall’altro
con gli analoghi dispositivi a livello di rete.
I dati ricevuti vengono, quindi, preparati per l’utilizzo di altre
applicazioni
L’applicazione controllo identifica la più opportuna
localizzazione e intensità delle azioni da intraprendere sulla
base dei risultati delle applicazioni relative alle valutazioni
di stabilità.
Le contromisure possono, in generale, essere realizzate in
modo automatico o visualizzate su un monitor per essere
attuate attraverso l’intervento di un operatore.
42
22/12/2011
85
Sistemi di comunicazione
l’informazione deve essere trasmessa ad altre sottostazioni o
centri di controllo usando la tecnologia di rete WAN (Wide
Area Network) connessa alle reti LAN
Normalmente, per la connessione tra una rete di stazione e
una WAN è necessario un Gateway, poiché i protocolli e le
tecnologie di rete utilizzate all’interno di LAN e WAN sono di
solito diversi
trasferimento sicuro dei segnali con un minimo e
relativamente stabile ritardo di propagazione.
i canali di comunicazione, inoltre, devono risultare
permanentemente aperti e rimanere integri durante un
guasto sul sistema di potenza.
86
Sistemi di comunicazione
Tutti
i sistemi di comunicazione sono
soggetti a livelli diversi ad interferenze e
rumori di vario genere.
Nel
caso dei sistemi di teleprotezione, i
parametri prestazionali e d’affidabilità,
applicabili anche per i sistemi WAMS sono
specificati nella Norma IEC 60834.
43
22/12/2011
87
Sistemi di comunicazione
Sicurezza dei sistemi di comunicazione: capacità
di prevenire che l’interferenza, ed il rumore,
possano generare un comando all’estremo
ricevente quando in realtà nessun segnale di
comando è stato inviato.
Depeandability: capacità di inviare e ricevere un
comando valido in presenza di interferenza e di
rumore.
Banda nominale e velocità di trasmissione: la
larghezza di banda del canale deve essere
sufficientemente ampia per supportare il bitrate.
La velocità di bit influenza il tempo di trasmissione.
Più elevato è il numero di bit/secondo, più ampia
deve risultare la larghezza di banda.
Tempo di propagazione: è il tempo che trascorre
dal momento in cui cambia lo stato di un
trasmettitore al momento in cui avviene il
corrispondente cambiamento di stato nel
ricevitore.
88
Variazione del tempo di propagazione: essa
diventa cruciale nei sistemi differenziali, come ad
esempio nei sistemi wide area per il controllo degli
sfasamenti tra aree e nelle protezioni differenziali
di corrente e, in cui devono essere confrontate
misure prese in nodi diversi della rete.
Simmetria
del
tempo
di
propagazione
(uguaglianza dei tempi): Tempi diversi di
propagazione possono essere dovuti a diversi
percorsi dei segnali sulla rete, dal buffering dei
dati o dal traffico.
Jitter del canale: Ogni volta che i dati passano
attraverso un confine che separa due canali
caratterizzati da differenti sorgenti di clock,
possono succedere scorrimenti dei dati.
Integrità dei dati: si riferisce alla probabilità che i
dati ricevuti, che sono stati oggetto di procedure
di rilevazione e/o correzione degli errori, siano
corretti.
44
22/12/2011
89
Tecnologie di comunicazione
Fibra
ottica
Doppino
di rame
Radio
Satellite
Powerline
90
Conclusioni
45