3. RAPPRESENTAZIONE DELLE FUNZIONI DI TRASFERIMENTO
DIAGRAMMI DI BODE
3.1. FUNZIONI DI TRASFERIMENTO COME FUNZIONI RAZIONALI FRATTE
Si può dimostrare che le funzioni di trasferimento di circuiti costituiti da elementi passivi a
costanti concentrate lineari e tempo-invarianti tipo R,L,C,M (mutue induttanze) sono funzioni
razionali fratte, cioè rapporto tra polinomi a coefficienti reali nella variabile complessa s. Le
radici dei polinomi sono reali o complesse coniugate. Le radici del numeratore si chiamano zeri
della funzione di trasferimento, quelle del denominatore poli.
V
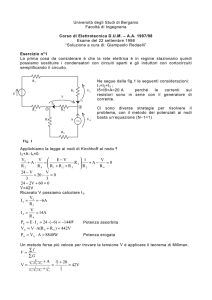
Consideriamo come esempio il circuito di fig.23 e calcoliamo W ( s ) v 2 . Poiché
V1
R
l’impedenza di un gruppo parallelo RC è data da Z
, si ottiene facilmente (partitore di
1 sRC
V
R2 ( 1 sR1C1 )
tensione) W ( s ) v 2
.
V1 R1 R2 sR1 R2 ( C1 C2 )
Si vede dunque che W( s ) è costituita da una
C1
funzione razionale fratta a coefficienti reali
espressi in forma letterale e calcolabili noto il
valore dei componenti del circuito. Si osserva che
R1
per s=0 il circuito diventa un partitore resistivo e
V1
V2
R2
V2
; per s il circuito diventa un
R2
V1 R1 R2
C2
V
C1
partitore capacitivo e 2
.
V1 C1 C2
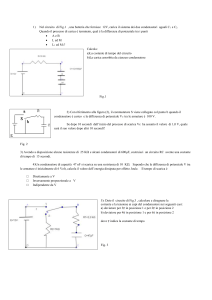
Consideriamo ora il circuito seguente, in cui i
valori dei parametri sono forniti in forma numerica
e calcoliamone l’impedenza di ingresso. Il
calcolo procede per passi successivi,
calcolando la serie degli ultimi due
elementi, aggiungendola in parallelo alla
1mH
capacità di 20 nF ecc.
Per comodità i vari passi vengono
sviluppati per intero nel riquadro a pagina
seguente.
Fig.23: Partitore di tensione costituito da
due gruppi RC.
1K
500
Z(s)
10 nF
20 nF
100
Si ottiene:
100 s 3 50 s2 10 s 1,6
Z( s )
100 s 3 40 s2 8 s 1
Si vede dunque che Z( s ) è costituita da una funzione razionale fratta a coefficienti reali espressi
in forma numerica e calcolabili noto il valore dei componenti del circuito. Per s=0 (analisi in
continua) Z( s ) 1,6 : il circuito diventa la serie delle tre resistenze. Per s l’induttanza si
apre, i condensatori diventano corti circuiti, quindi Z( s ) 1.
0,1 K
Z1 = 0,1+s
Z1
1 mH
Z2
20 nF
Z1 = 0,1+s
Z2
1
1
20 s
0 ,1 s
0 ,1 s
20 s 2 2 s 1
0,5 K
Z 3 0 ,5
Z2
Z3
Y3
20 nF
Z4
20 s 2 2 s 1
10 s 2 2 s 0 ,6
Z4
Z3
0 ,1 s
10 s 2 2 s 0 ,6
20 s 2 2 s 1
20 s 2 2 s 1
1
Y3 10 s
Y3 10 s
20 s 2 2 s 1
100 s 3 40 s 2 8 s 1
10
s
10 s 2 2 s 0 ,6
10 s 2 2 s 0 ,6
1K
Z(s)
Z4
Z( s ) 1
10 s 2 2s 0 ,6
100 s 3 50 s 2 10 s 1,6
100 s 3 40 s 2 8 s 1
100 s 3 40 s 2 8 s 1
3.2. ZERI E POLI
In generale la funzione di trasferimento di un sistema è costituita da una funzione razionale fratta
della variabile complessa s; può quindi essere scritta come
m
ai s i
W ( s ) i n0
bi s i
i0
Le r radici distinte del denominatore pi i j i , di molteplicità i , si dicono poli del
sistema. Si vede immediatamente che i poli di W( s ) coincidono con le radici dell’equazione
polinomiale associata all’equazione differenziale omogenea del sistema
n
i
bi d iy 0
i 0 dt
e pertanto individuano i modi del sistema.
Le r’ radici distinte del numeratore zi i' j i' , di molteplicità i' , si dicono zeri. Pertanto la
W( s ) può essere scritta nella forma:
r'
( s zi )i
W ( s ) i r1
'
( s pi )i
k'
i 1
bn
.
am
Zeri e poli possono essere reali, singoli o multipli e complessi coniugati, anch’essi singoli o
multipli. La funzione W( s ) può venire rappresentata dal valore di k’ e dalla distribuzione di poli
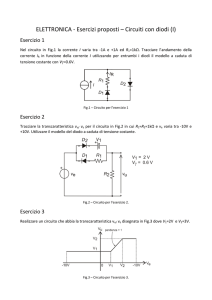
e zeri sul piano complesso. La fig.24 riporta a titolo di esempio una semplice distribuzione di
poli e zeri. Si ricorda che i poli, in quanto legati ai modi, devono stare alla sinistra dell’asse
immaginario perché sia garantita la stabilità del sistema, quindi i poli devono avere parte reale
negativa.
con k '
j
Fig.24: Esempio di rappresentazione di poli e zeri sul piano
complesso della variabile s. Sono riportati un polo reale, due
poli complessi e coniugati e due zeri, di cui uno nell’origine.
Nell’espressione di W( s ) conviene tenere separati poli e zeri reali da quelli complessi coniugati.
Continuiamo a tenere conto dei primi nella forma ( s zi ) o ( s pi ) , dove zi e pi sono la parte
reale dello zero e del polo o, introducendo la costante di tempo T, nella forma 1 sT . Una coppia
di poli e zeri complessi e coniugati viene rappresentata da un polinomio di 2° grado, con
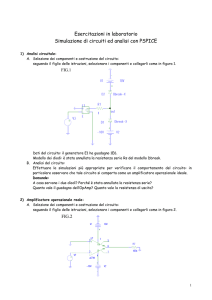
discriminante minore di zero. Tale polinomio viene scritto nel modo seguente
s
s 2
1 2
(
) , con ni reale e positivo. Le radici s1,2 ni ni 2 1 sono
ni
ni
complesse e coniugate se vale la condizione 1 . Inoltre 0 se le radici (poli) devono
trovarsi a sinistra dell’asse immaginario. prende il nome di fattore di smorzamento, n quello
di frequenza naturale; ni è la parte reale della coppia di radici. La fig. 25 mostra come
varia sul piano complesso la posizione della coppia di radici al variare del fattore . Ovviamente
la rappresentazione in termini di costante di tempo per poli o zeri singoli e di fattore di
smorzamento e frequenza naturale per poli o zeri complessi coniugati comporta, rispetto
all’ultima espressione precedentemente scritta per W(), la sostituzione del fattore k’ con un
fattore k, che prende il nome di guadagno e, come si potrebbe constatare, è il rapporto tra i
coefficienti b e a relativi alle potenze di s di ordine più basso.
=0
poli immaginari puri in
j n
=1
poli reali e coincidenti in
n
Fig.25: Spostamento delle radici del
fattore trinomio di 2° grado al variare
del fattore di smorzamento .
j
j n 1 2
3.3. RAPPRESENTAZIONE DELLE
FUNZIONI IN
Molto spesso è sufficiente conoscere il
comportamento delle funzioni di
trasferimento al variare della frequenza,
cioè in corrispondenza all’asse j del
piano complesso. Per passare dalla rappresentazione di una funzione in s alla rappresentazione in
è sufficiente sostituire formalmente s con j. Si ottiene così una funzione W(), complessa di
variabile reale. Mentre la funzione di trasferimento W(s) è la trasformata di Laplace di una
funzione della variabile tempo, la W() è la trasformata di Fourier della stessa funzione.
Si noti che la W() è individuata per ciascun da una coppia di grandezze, siano esse la parte
reale R() e la parte immaginaria I() oppure il modulo M () e la fase (). Le relazioni che
legano queste grandezze alla W() e fra di loro sono le seguenti
W ( ) R( ) jI( ) M ( )e j ( )
I
M ( ) W ( ) R2 I 2
W( ) arctg
R
R M cos
I M sen
n
3.3.1. Diagrammi di Bode
Una rappresentazione molto usata per la sua immediatezza e praticità è quella mediante i
diagrammi logaritmici di Bode. In essi in funzione del logaritmo della frequenza sono riportati
il logaritmo del modulo e la fase di W(). Il diagramma del modulo è pertanto un diagramma
doppiamente logaritmico, mentre il diagramma della fase ha una scala logaritmica unicamente
sulle ascisse e in ordinata la scala è lineare. I moduli sono normalmente misurati in decibel (dB).
Per la scala delle ascisse () i logaritmi più usati sono il logaritmo decimale, e in questo caso si
parla di decadi, nel senso che due frequenze che hanno un rapporto 10 fra di loro hanno distanze
sempre uguali, indipendentemente dal loro valore assoluto, oppure si utilizza il logaritmo in base
2. L’intervallo di frequenza i cui estremi sono due frequenze in rapporto 2 fra di loro si dice
ottava.
Il ricorso a una rappresentazione logaritmica è legato a due tipi di considerazione. La scala
logaritmica espande la dinamica della rappresentazione, cioè permette di rappresentare grandezze
che possono avere variazioni di notevole ampiezza, in quanto il logaritmo contrae i valori elevati
ed espande quelli bassi.
In secondo luogo molto spesso è necessario eseguire il prodotto di due o più funzioni. Siano
F1 M1e j 1 e F2 M 2 e j 2 due funzioni della variabile . La funzione prodotto è data da
F F1 F2 M1 M 2 e j1 e j 2 M1 M 2 e j( 1 2 )
in cui il modulo è il prodotto dei moduli, mentre la fase è la somma delle fasi. Quando per il modulo
si utilizza una rappresentazione logaritmica si ha
log F log M1 M2 log M1 log M2
e quindi la legge di composizione dei moduli diventa uguale a quella delle fasi. L’utilizzo di
scale logaritmiche permette di dare una rappresentazione molto comoda della W(), quando
questa sia espressa in forma fattorizzata. Questa rappresentazione prende il nome di
rappresentazione asintotica di Bode.
La conoscenza di poli e zeri consente di tracciare rapidamente i diagrammi di Bode. Inoltre la
conoscenza di poli e zeri è deducibile dalla struttura di un circuito e viceversa dalla conoscenza
di poli e zeri si può risalire al circuito, nel senso che poli e zeri sono attribuibili separatamente a
elementi circuitali (ad esempio: “per modificare in un certo modo la funzione di trasferimento
dobbiamo introdurre un polo di determinato valore e quindi dobbiamo introdurre un
condensatore di valore noto in una determinata posizione”). Quindi i diagrammi di Bode
forniscono un modo semplice per ottenere dal circuito la risposta in frequenza e viceversa
(progetto) per individuare quali componenti occorre inserire in un circuito per avere la risposta in
frequenza desiderata.
Si riprenda in considerazione la W(s): essa comprende, a numeratore come a denominatore, solo
fattori del tipo:
K
s
1 sT
s
s 2
1 2
(
)
n
n
Sostituendo a s j, a sua volta la W( può comprendere solo i fattori
K
j
1 j T
j
j 2
1 2
(
)
n
n
Pertanto il tracciamento della W( su scala logaritmica può venire ridotto a
1) Tracciamento delle curve corrispondenti ai singoli fattori
2) Composizione delle singole curve sommando i termini del numeratore e sottraendo quelli del
denominatore.
Fattore costante k.
Per la costante K, il diagramma di Bode del modulo è una retta orizzontale di ordinata 20logK,
mentre la fase è 0, in quanto K è reale (fig.26).
M(dB)
20logK
0
=1
Fig.26: Diagramma di Bode del fattore K
=1
Fattore monomio.
Per il fattore monomio j si ha
M=
20logM=20log
e poiché anche l’ascissa x = log, si ottengono i diagrammi di fig.27, in cui la pendenza della
curva del modulo è di 20dB/decade, mentre la fase è 90°. Se la scala delle ascisse fosse espressa
in ottave, la pendenza della curva del modulo sarebbe di circa 6 dB/ottava.
M(dB)
/2
20dB
1
10
1
Fig.27: Diagrammi di Bode del fattore j.
Fattore binomio.
Per il fattore binomio si ha
20 log M 20 log 1 2 T 2
arctg T
Il diagramma del modulo (fig.28) presenta due asintoti le cui equazioni si determinano
trascurando T rispetto a 1 (limite per 0 ) e 1 rispetto a T (limite per ).
Nel primo caso si ottiene:
20 log M 20 log 1 0
Nel secondo
20 log M 20 log T 20 log 20 log T
La prima relazione rappresenta sul piano di Bode (sull’asse delle ascisse è riportato il log ) una
retta coincidente con l’asse delle ascisse, la seconda rappresenta una retta inclinata di
1
20dB/decade che interseca l’asse delle ascisse nel punto log log T , cioè per . A
T
questa frequenza la differenza tra l’andamento asintotico e quello reale è pari a
20 log 1 1 3dB
mentre già una decade sopra o sotto la frequenza di rottura, la differenza si riduce a 0,04 dB,
quantità che può essere ritenuta trascurabile. Per quanto riguarda la fase, (fig.28) essa, con le
M(dB)
/2
/4
1
T
1
10T
Fig.28: Diagrammi di Bode del fattore 1+ jT.
1 10
T T
stesse approssimazioni, vale 0, cioè coincide con l’asse delle ascisse per
1
mentre vale
T
2
1
. Una buona approssimazione dell’andamento reale si ha connettendo con una retta i
T
punti dei due asintoti che si trovano rispettivamente una decade sotto e una decade sopra la
1
frequenza . Lo scostamento massimo tra andamento asintotico e reale in questo caso non
T
10
1
supera gli 0,1 radianti in corrispondenza alle due frequenze
e .
10T T
per
Dal diagramma del modulo dei fattori monomio e binomio si vede come la presenza di uno zero
introduce un taglio di bassa frequenza.
3.3.2. Esempi.
Zero reale. La funzione di trasferimento 1 sT corrisponde per esempio all’impedenza del
circuito di fig.29a .
s
1 R
e i diagrammi di Bode relativi alla Z( s ) si presentano
Z R sL R( 1 ) da cui
R
T L
L
R
come in fig.29b. Si vede che a bassa frequenza, cioè per , il circuito si comporta in modo
L
resistivo, mentre a frequenza superiore prevale il comportamento induttivo.
a
I
V
Z(dB)
R
b
/2
/4
L
R
L
R
L
Fig.29a,b: Diagrammi di Bode dell’impedenza del circuito RL serie.
1
, in cui cioè il fattore binomio prima
1 sT
1
considerato compare al denominatore. In questo caso la funzione contiene un polo in s .
T
Poiché il fattore binomio compare a denominatore, i diagrammi di Bode si ottengono da quelli
del fattore binomio appena considerato semplicemente cambiando il segno sia al termine relativo
al modulo che a quello della fase (fig.30).
Esempi di funzioni di trasferimento con un polo reale si desumono dalla fig.31. A questo punto,
a titolo riassuntivo e per chiarire il significato di quanto fatto finora, prendiamo in considerazione
la fig.32, in cui si riporta: una vista tridimensionale del modulo di una funzione con un polo
reale, (funzione reale della variabile complessa s), una rappresentazione della stessa funzione
mediante curve di livello e infine si mostra cosa significhi sostituire a s j e come la
rappresentazione di F( ) venga approssimata con il metodo di Bode.
Polo reale. Consideriamo ora la funzione F( s )
M(dB)
0
-3dB
1
T
0
1
1 10
10T T T
-/4
-/2
Fig.30: Diagrammi di Bode di una funzione di trasferimento con un
1
polo reale in s
T
3.3.3. Composizione zeri poli.
Consideriamo la seguente funzione di
V1
V2
V1
V2
trasferimento
s1
, che può essere
F( s ) 10
s 100
1 s1
Fig.31: Esempi di circuiti la cui funzione di
scritta
come
.
F
(
s
)
V2
s
10
trasferimento
ha un polo reale.
1
V1
100
Si ha allora:
1
j
F( ) dB 20 log 20 log 1 j 20 log 1
10
100
dB
+20
0
1
10
100
-20
Fig.33: Diagramma di Bode di una funzione con uno zero in s= -1 e
un polo in s=-100.
Il diagramma di Bode risultante si ottiene dalla somma dei diagrammi parziali relativi alla
costante, allo zero e al polo e viene riportato nella fig.33, in cui sono mostrati separatamente
anche i contributi parziali.
La funzione di trasferimento considerata può essere ottenuta ad esempio dal circuito (fig.34) già
visto in precedenza, che qui si riporta nuovamente, con la funzione di trasferimento
corrispondente alla sua amplificazione di tensione. Con riferimento al circuito in questione, si
rifletta sul seguente
Problema: determinare il valore di resistenze e capacità tali che l’effetto di polo e zero si
compensino, in modo da avere una risposta piatta per la massima estensione possibile di
frequenze.
a
2
1
.
5
1
0
F( s )
polo
.
5
j
0
4
0
4
2
0
2
0
b
1
0
0
j
Fig.32: Rappresentazione della funzione
1
2
F( s )
1
1
1 s
in prospettiva (a), mediante curve di livello (b), sul
piano F ( s ) , j (c ) e mediante diagramma
asintotico di Bode (d).
F( s )
s 1
c
1
1
2
1
F( j )
d
dB
0
1
0
C1
R1
V1
V2
R2
C2
V
R2
W( s ) v 2
V1 R1 R2
1
3.3.4. Esempio numerico.
Consideriamo il circuito di fig. 35. La tensione VC
ai capi del condensatore è data da
E
e presenta un polo reale
VC
1 sRC
p
1
1
, di valore
MHz 5 KHz .
RC
195
1 sR1C1
sR1 R2 ( C1 C2 )
R = 1,5 K
+
R1 R2
E
Fig.34: Circuito con uno zero e un polo.
3.3.5. Determinazione sperimentale della frequenza
del polo.
Se vogliamo determinare sperimentalmente (fig.36) la
frequenza del polo, si visualizza sull’oscilloscopio la
risposta in frequenza e si individua la frequenza f p
alla quale il valore della risposta si è ridotto a 0.707,
1
(
).
2
3.3.6. Poli e struttura di un circuito.
Consideriamo ora (fig.37) lo stesso circuito RC di
fig.35, nel quale però si vuole conoscere la tensione
ai capi della resistenza.
C = 130 nF
VC
Fig.35: Circuito con polo
reale.
VC
E
1
1
2
fp
f
Fig.36: Determinazione sperimentale
del polo.
C
E
+
R
V
VR
sRC
E
1 sRC
Fig.37: Circuito con uno zero e un polo reali.
La funzione di trasferimento ha ora uno zero
nell’origine e lo stesso polo della funzione
precedente. Questo è un esempio di una
proprietà generale: i denominatori delle
funzioni
di
trasferimento
contengono
informazioni sulla rete e non sul punto di
prelievo della grandezza di uscita.
Come abbiamo già notato la presenza di uno zero introduce un taglio di bassa frequenza.
Vedremo più avanti come una possibile connessione fra stadi amplificatori possa venire
realizzata mediante condensatori in serie (accoppiamento a condensatore). Questa connessione
introduce un taglio di frequenza inferiore.
3.3.7. Approssimazione a poli dominanti.
Se la risposta di frequenza di un amplificatore si presenta come in fig. 38, con la parte intorno al
taglio di alta frequenza nettamente separata da quella relativa al taglio di bassa frequenza, è
possibile ricorrere all’approssimazione a poli dominanti, cioè attribuire sia la risposta di bassa
frequenza che quella di alta a un unico polo singolo, detto dominante. Questa approssimazione è
valida se i poli di alta frequenza e quelli di bassa frequenza sono molto distanziati.
Chiamando L e H rispettivamente i poli,
assunti come dominanti, di alta e di bassa
Av
frequenza, la funzione di trasferimento viene
-3dB
schematizzata come:
s
1
F( s ) v( s ) A
sL sH
L
H
e può essere considerata come risultante dalla
Fig.38: Risposta in frequenza separabile in
connessione in cascata di tre parti, di bassa,
parte di bassa e alta frequenza e quindi
media e alta frequenza, come mostrato in
rappresentabile con l’approssimazione a
fig.39.
poli dominanti.
s
sL
1
A
sH
Fig.39: Scomposizione di una funzione di trasferimento
in parti di bassa e alta frequenza secondo
l’approssimazione a poli dominanti.
3.3.8. Poli e zeri complessi.
In certe situazioni può essere necessario disporre di pendenze fuori banda superiori a quelle
ottenibili con poli singoli. In altre parole può non bastare aumentare il numero dei poli singoli
introducendo altre celle di tipo RC per aumentare la pendenza. Se occorre un brusco cambio di
pendenza è necessario introdurre dei poli complessi coniugati. Prendiamo allora in
considerazione la funzione F() che presenta a denominatore il fattore trinomio:
1
F( )
j
j 2
1 2
(
)
n
n
Il modulo in dB è dato da
1
F( ) dB 20 log
2
2
2
2
1
4
2
n2
n
Le espressioni asintotiche si trovano facendo tendere a 0 e a :
0
F dB 20 log 1 0
F dB 20 log
1
2 2
2
n