Lezione 1. Sistemi ad un grado di libertà:
l’oscillatore elementare
Federico Cluni
26 febbraio 2015
1
Richiami e nozioni comuni
Si richiamano in questa sezione concetti di dinamica di una massa isolata e nozioni comuni utili
nel seguito.
1.1
Equazione fondamentale della dinamica dell’elemento libero
L’equazione fondamentale della dinamica, o seconda legge di Newton, afferma che:
−−→
m~a = f~(OP , ~v , t)
(1)
dove: m è la massa dell’elemento, ~a è l’accelerazione dell’elemento, f~ è la forza totale agente
−−→
−−→
dOP
e dal tempo
sull’elemento, che dipende dalla posizione dell’elemento OP , dalla velocità ~v =
dt
−−→
t. La (1) è un’equazione differenziale vettoriale del 2◦ ordine con incognita le componenti di OP .
−−→
Le componenti di OP , ~v e ~a rispetto al sistema di riferimento cartesiano sono indicate rispettivamente con (x, y, z), (ẋ, ẏ, ż) e (ẍ, ÿ, z̈). Proiettando sugli assi del sistema di riferimento
si ottiene quindi:
mẍ = fx (x, y, z, ẋ, ẏ, ż, t)
mÿ = fy (x, y, z, ẋ, ẏ, ż, t)
(2)
mz̈ = fz (x, y, z, ẋ, ẏ, ż, t)
per cui si ha un sistema di equazioni differenziali del 2◦ ordine nelle funzioni x(t), y(t) e z(t)
la cui soluzione generalmente esiste ed è unica assegnando le condizioni iniziali per le funzioni
incognite e le loro derivate prime.
1.2
Energia cinetica
Si definisce l’energia cinetica, T , come:
1
1
T = m |~v |2 = m ẋ2 + ẏ 2 + ż 2
2
2
L’energia cinetica è una quantità scalare non negativa.
1.3
(3)
Lavoro
−−→
Il lavoro elementare compiuto dalla forza f~ a seguito di uno spostamento infinitesimo dOP =
(dx, dy, dz) compiuto in un istante infinitesimo dt è dato dalla seguente espressione:
−−→
dL = f~ · dOP
(4)
Il lavoro, L , compiuto dalla forza nell’intervallo [t1 , t2 ] è quindi:
Z t2
−−→
L =
f~ · dOP
t1
1
(5)
1.4
Teorema del lavoro
Il teorema del lavoro afferma che la variazione subita dell’energia cinetica di un elemento in un
qualsiasi intervallo di tempo eguaglia il lavoro effettuato dalla forza totale agente sull’elemento
durante il medesimo intervallo, ovvero:
L = T (t2 ) − T (t1 )
(6)
Infatti procedendo in componenti cartesiane si ha:
−−→
dẋ
dẏ
dż
dL = f~ · dOP = fx · dx + fy · dy + fz · dz = m
· dx + m
· dy + m
· dz =
dt
dt
dt
dy
dz
dx
+ mdẏ ·
+ mdż ·
= mdẋ · ẋ + mdẏ · ẏ + mdż · ż =
mdẋ ·
dt
dt
dt
1
1
1
1
2
2
2
2
2
2
m d ẋ + m d ẏ + m d ż = d m ẋ + ẏ + ż
= dT
2
2
2
2
(7)
Dalla precedente si ha che:
Z t2
1
−−→ 1
f~·dOP = m ẋ(t2 )2 + ẏ(t2 )2 + ż(t2 )2 − m ẋ(t1 )2 + ẏ(t1 )2 + ż(t1 )2 = T (t2 )−T (t1 )
L =
2
2
t1
(8)
1.5
Forze conservative e potenziale
Si abbia una forza posizionale, ovvero che dipende solo dalla posizione dell’elemento e non dalla
sua velocità o dal tempo:
−−→
f~ = f~(OP ) = (fx (x, y, x), fy (x, y, x), fz (x, y, x))
(9)
in tal caso il lavoro elementare è dato da:
dL = fx (x, y, z) · dx + fy (x, y, z) · dy + fz (x, y, z) · dz
(10)
La precedente è una forma differenziale lineare in x, y e z.
Se le fx , fy e fz sono funzioni continue in un dominio (aperto e connesso) e se esiste una
funzione (scalare) U = U (x, y, z) continua e tale che:
∂U
= fx ,
∂x
∂U
= fy ,
∂y
∂U
= fz
∂z
(11)
allora si dice che la forza f~ è conservativa, e U si indica come potenziale della forza. In tal caso
il membro di destra della (10) rappresenta il differenziale esatto di U :
dU = fx (x, y, z) · dx + fy (x, y, z) · dy + fz (x, y, z) · dz
(12)
Quindi nel caso di forza conservativa il lavoro elementare eguaglia il differenziale esatto del
suo potenziale, ovvero:
dL = dU
(13)
Perciò, nel caso di forza conservativa il lavoro non dipende dal percorso seguito ma solo dalla
posizione iniziale e finale, e il lavoro totale effettuato è pari alla differenza di potenziale fra tali
punti.
L = U (x2 , y2 , z2 ) − U (x1 , y1 , z1 )
(14)
In particolare, il lavoro totale per percorsi chiusi è nullo.
Si noti che la condizione che f~ sia posizionale è necessaria ma non sufficiente perché la stessa
sia conservativa. Perché ciò sia verificato si deve avere:
2
• fx , fy e fz sono funzioni continue insieme con le loro derivate prime nel dominio;
• deve essere:
1.6
∂fy
∂fx
=
,
∂y
∂x
∂fy
∂fz
=
,
∂z
∂y
∂fz
∂fx
=
∂x
∂z
(15)
Teorema di conservazione dell’energia
Si definisce energia potenziale la quantità:
Π = −U
(16)
e energia totale di un elemento soggetto a forza conservativa la quantità:
E =T +Π
(17)
Il teorema di conservazione dell’energia afferma che l’energia totale di un elemento soggetto
a forza conservativa si mantiene costante durante il moto, ovvero:
dE = 0 ⇒ E = cost
(18)
e la dimostrazione è immediata considerando la (7) e la (13).
1.7
Impulso e quantità di moto
Si definisce impulso elementare della forza f~ nell’intervallo di tempo [t, t + dt] la quantità:
dI~ = f~dt
(19)
~ è quindi:
L’impulso della forza f~ nell’intervallo di tempo [t1 , t2 ], I,
I~ =
Z
t2
f~dt
(20)
t1
La quantità di moto, p~, di un elemento di massa m avente velocità ~v all’istante t è definita
da:
p~ = m~v
1.8
(21)
Teorema dell’impulso
Il teorema dell’impulso afferma che la variazione subita dalla quantità di moto di un elemento in
un qualsiasi intervallo di tempo eguaglia l’impulso della forza totale agente sull’elemento durante
il medesimo intervallo, ovvero:
I~ = p~(t2 ) − p~(t1 )
(22)
La dimostrazione segue immediatamente dalla (1)
f~ = m~a ⇒ f~dt = m~adt = md~v
da cui:
I~ =
Z
t2
t1
f~dt =
Z
(23)
t2
t1
md~v = m~v (t2 ) − m~v (t1 ) = p~(t2 ) − p~(t1 )
3
(24)
1.9
Principio di D’Alembert
Il principio di D’Alembert consente di interpretare il problema dinamico come se fosse un problema statico, introducendo fra le forze agenti sulla massa anche le forze inerziali date da
f~i = −m ~a.
Il principio di D’Alembert in sostanza afferma che in ogni istante, in condizioni di quiete o
di moto, la somma di tutte le forze agenti sulla massa, comprensive di quelle di inerzia, è uguale
a zero.
f~ + f~i = 0
(25)
L’identità con la (1) è evidente.
2
L’oscillatore elementare
L’oscillatore elementare rappresenta il più semplice sistema dinamico, essendo dotato di un solo
grado di libertà. Esso è di fondamentale importanza in quanto:
• consente di introdurre alcuni concetti fondamentali di dinamica delle strutture;
• i risultati ottenuti possono essere utilizati per la risoluzione di strutture più complesse.
L’oscillatore elementare è costituito da:
• una massa che può traslare secondo una sola direzione;
• un dispositivo che fornisce una forza di richiamo, ovvero che a fronte di uno spostamento
esercita una forza che tende a far ritornare la massa nella posizione iniziale. La forza
dipende dal solo spostamento.
Il valore della massa è indicato con m, gli spostamenti si valutano rispetto ad un sistema
di ascisse x con origine, in genere, nella posizione di riposo del sistema. In una prima fase il
dispositivo che fornisce la forza di richiamo si può considerare a comportamento elastico lineare, schematizzabile quindi come una molla, per cui esercita sulla massa una forza di richiamo
proporzionale secondo una costante di rigidezza k allo spostamento:
fx = −k x
(26)
1
1
Il potenziale della forza vale U = − k x2 e l’energia potenziale Π = k x2 .
2
2
Figura 1: Schema dell’oscillatore elementare.
L’equazione fondamentale della dinamica ci fornisce:
m ẍ = −k x
(27)
perciò:
m ẍ + k x = 0
La (28) è una equazione differenziale ordinaria, lineare, a coefficienti costanti, del
nea. Si può riscrivere come:
ẍ + ω12 x = 0
4
(28)
2◦ ,
omoge(29)
dove
r
ω1 =
k
m
(30)
è definita come la pulsazione propria (o naturale) del sistema.
L’integrale generale della (29) su può scrivere come:
x(t) = B1 sin ω1 t + B2 cos ω1 t
(31a)
x(t) = C sin (ω1 t + ϕ)
(31b)
Si noti che è sempre possibile passare da B1 , B2 a C, ϕ e viceversa:
q
B2
tan ϕ =
con ϕ ∈ (−π, +π] , C = B12 + B22
B1
B1 = C cos ϕ, B2 = C sin ϕ
Le costanti si determinano imponendo le condizioni iniziali, ovvero la posizione e la velocità
nell’istante iniziale:
x(0) = x0
(32)
ẋ(0) = ẋ0
(33)
da cui si ottiene:
B1 =
x0
tan ϕ = ω1
ẋ0
ẋ0
,
ω1
B2 = x0
(34a)
ẋ20
ω12
(34b)
s
C=
x20 +
Si noti che per poter prendere sempre positiva la radice, deve essere ϕ ∈ (−π, +π].
Le oscillazioni libere sono quindi oscillazioni armoniche con pulsazione ω1 . Con in mente la
(31b), la x(t) può essere interpretata come l’ascissa di un punto che si muove su una circonferenza
di raggio C con velocità angolare ω1 a partire dall’angolo ϕ, per cui la ω1 è anche detta frequenza
circolare o velocità angolare. Si noti che la ω1 dipende solo da k e m.
Altre grandezze di interesse sono le seguenti:
• Periodo proprio: è l’intervallo di tempo impiegato per compiere un’oscillazione completa:
r
2π
m
T1 =
= 2π
(35)
ω1
k
• Frequenza: è il numero di oscillazioni complete nell’unità di tempo:
r
1
ω1
1
k
f1 =
=
=
T1
2π
2π m
(36)
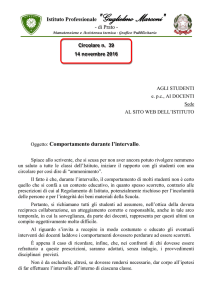
Due casi particolari sono i seguenti:
• la massa viene spostata dalla sua posizione di riposo e quindi abbandonata con velocità
nulla: x(0) = x0 , ẋ(0) = 0
x(t) = x0 cos ω1 t
5
x(t)
x0
0
−x0
0
1T1
2T1
3T1
t
Figura 2: Oscillazioni libere con x(0) = x0 e ẋ(0) = 0.
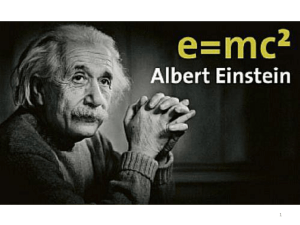
• la massa viene sottoposta ad un impulso pari a m ẋ0 : x(0) = 0, ẋ(0) = ẋ0
ẋ0
x(t) =
sin ω1 t
ω1
x(t)
ẋ0 /ω1
0
−ẋ0 /ω1
0
1T1
2T1
t
Figura 3: Oscillazioni libere con x(0) = 0 e ẋ(0) = ẋ0 .
6
3T1