ITIS “J.F. Kennedy” – prof. Maurilio Bortolussi
1
Indice
1 I SISTEMI LINEARI E CONTINUI NEL DOMINIO DEL TEMPO
1.1 Introduzione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.2 La funzione di trasferimento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.2.1 Risposta all’impulso di Dirac . . . . . . . . . . . . . . . . . . . . . . . . . .
1.2.2 Risposta al gradino . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.3 Trasformazione dei componenti elettrici elementari . . . . . . . . . . . . . . . . . .
1.3.1 Esempi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.4 Funzione di trasferimento di una rete RLC . . . . . . . . . . . . . . . . . . . . . . .
1.5 Ordine di un sistema . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.5.1 Sistemi di ordine 0 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.5.2 Sistemi del primo ordine . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.5.3 Sistemi del secondo ordine . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.6 Risposta al gradino di un sistema del secondo ordine . . . . . . . . . . . . . . . . .
1.6.1 Caso τ22 > 4 · τ1 · τ2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.6.2 Caso τ22 = 4 · τ1 · τ2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.6.3 Caso τ22 > 4 · τ1 · τ2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.6.4 Parametri della risposta al gradino . . . . . . . . . . . . . . . . . . . . . . .
1.7 Modello matematico del motore in c.c. a magneti permanenti . . . . . . . . . . . .
1.8 Domande . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.9 Esercizi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.10 Laboratorio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.10.1 Lab. 5: Analisi sperimentale nel dominio del tempo della risposta al gradino
di una rete RC e di una rete CR . . . . . . . . . . . . . . . . . . . . . . . .
2
2
2
4
4
5
5
7
7
7
8
9
10
11
11
11
13
14
16
16
18
18
2
Sistemi nel dominio del tempo - v. 0.1
1
I SISTEMI LINEARI E CONTINUI NEL DOMINIO
DEL TEMPO
1.1
Introduzione
Scopo del presente capitolo e l’esposizione dei metodi di analisi del comportamento temporale dei
sistemi lineari continui a costanti concentrate a seconda delle particolari sollecitazioni presenti in
ingresso e delle particolari condizioni iniziali.
Il significato degli aggettivi “lineare” e “continuo” sono già stati analizzati in precedenza. Ci
soffermiamo ora sul significato dell’espressione “a costanti concentrate”.
Quando si rappresenta un circuito elettrico inserendo una resistenza R, un condensatore C
e/o un induttore L in realtà si sta effettuando una semplificazione (i modelli sono semplificazioni)
ovvero che il comportamento resistivo del circuito sia tutto localizzato, o meglio “concentrato”,
nel resistore, trascurando cosı̀ la componente resistiva dei cavi di connessione, del condensatore
e dell’induttore stessi. Lo stesso si può dire del comportamento induttivo proprio dei cavi stessi,
ecc. ecc..
In realtà tale semplificazione è accettabile finché le correnti e le tensioni in gioco variano con
frequenze relativamente basse ed i cavi di connessione non sono particolarmente lunghi.
E’ evidente che l’analisi che seguirà non può essere applicata ai sistemi discreti, tra i quali si
annoverano i diffusissimi sistemi a microprocessore, ma comunque essa è un passo ineludibile per
comprendere i metodi che si applicano nel discreto.
Per effettuare l’analisi nel dominio del tempo è necessario costruire il modello matematico del
sistema attraverso un percorso che può essere riassunto nei seguenti passi:
• Definizione dei limiti del sistema e degli elementi che lo compongono
• Formulazione delle ipotesi semplificative
• Determinazione delle equazioni algebriche e/o integro-differenziali
• Soluzione delle equazioni in base alle sollecitazioni di prova ad esso applicate
• Passare dal modello astratto al modello concreto attraverso delle prove sperimentali
• Confrontare la risposta teorica con la risposta reale
• Correggere il modello matematico o rivedere il procedimento utilizzato se la previsione teorica
si discosta eccessivamente dal risultato sperimentale
La fase teorica di analisi deve essere sempre seguita da una verifica sperimentale. Nelle applicazioni
pratiche le difficoltà maggiori si incontrano proprio nel trasferire i risultati teorici al fenomeno fisico
reale a causa delle ipotesi semplificative assunte nella fase di elaborazione del modello.
D’altro canto nei modelli dei sistemi utilizzati nei controlli automatici spesso si sacrifica la
precisione a favore della semplicità; è inutile ricorrere a modelli sofisticati quando i valori dei
parametri che in essi compaiono si conoscono solo approssimativamente.
1.2
La funzione di trasferimento
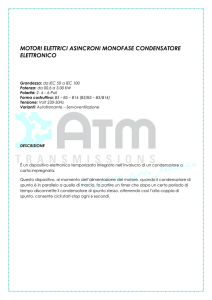
Partiamo da un esempio. Si consideri la rete RC di figura 1. Vogliamo determinare l’andamento
temporale dell’uscita vo qualora in ingresso venga applicato in un primo caso un impulso di Dirac
ed in un secondo caso un gradino unitario.
La rete RC è costituita da un resistore ed un condensatore collegati in serie. Da un punto di
vista sistemico essa può essere rappresentata mediante lo schema a blocchi riportato in figura 1.
Determiniamo il modello matematico del circuito RC. Dal II principio di Kichhoff si ha:
vR (t) + vC (t) = vi (t)
3
ITIS “J.F. Kennedy” – prof. Maurilio Bortolussi
R
C
vi
vo
vi
RC
vo
Figura 1: Rete RC - schema elettrico e schema a blocchi
Applicando la legge di Ohm otteniamo:
R · i(t) + vC (t) = vi (t)
Ricordando la relazione v-i nel condensatore:
R·C ·
dvC (t)
+ vC (t) = vi (t)
dt
Poiché vO (t) = v C (t), si ottiene la seguente equazione differenziale del primo ordine che lega
tra loro ingresso ed uscita:
dvO (t)
R·C ·
+ vO (t) = vi (t)
(1)
dt
Determinare vo (t) equivale a risolvere l’equazione differenziale precedente. Utilizziamo a tale
scopo il metodo di Laplace e trasformiamo ambo i membri dell’equazione differenziale:
dvO (t)
L R·C ·
+ vO (t) = L [vi (t)]
dt
Applichiamo le proprietà fondamentali della trasformata di Laplace
dvO (t)
+ L [vO (t)] = L [vi (t)]
R·C ·L
dt
Nell’ipotesi che vo (0) = V0 , (condensatore carico alla tensione V0 all’istante t = 0) antitrasformando otteniamo:
R · C · (s · VO (s) − V0 ) + VO (s) = VI (s)
Raccogliamo VO (s) ed otteniamo
VO (s) =
1
R · C · V0
+
· VI (s)
R·C ·s+1 R·C ·s+1
(2)
L’espressione di VO (s) cosı̀ ottenuta è valida per qualsiasi segnale VI (s) presente in ingresso.
Si può notare che essa è data dalla somma di due componenti, una dipendente dalle sole condizioni
iniziali V0 , denominata risposta libera, ed una dipendente dalla sollecitazione di ingresso VI (s),
denominata risposta forzata.
Ipotizziamo, per ora, che il condensatore sia inizialmente scarico. Pertanto, il legame tra
sollecitazione e risposta si riduce a:
VO (s) =
1
· VI (s)
R·C ·s+1
(3)
4
Sistemi nel dominio del tempo - v. 0.1
Questa equazione afferma che la risposta VO (s) dipende dalla sollecitazione VI (s) tramite la
funzione G(s) cosı̀ definita:
VO (s)
G(s) =
(4)
VI (s)
Tale funzione viene denominata più generalmente funzione di trasferimento, in breve F.d.T.. Essa costituisce il modello matematico del sistema nel campo complesso ed esprime il legame esistente tra la trasformata della sollecitazione applicata e la trasformata della risposta ad essa
corrispondente.
Ogni sistema lineare continuo è caratterizzato da una propria funzione di trasferimento che
contiene tutte le informazioni per individuare le caratteristiche del sistema stesso. Essa non
dipende né dal tipo di sollecitazione applicata né dalla risposta, come si può desumere dall’esempio
precedente.,ma solo dai parametri del sistema.
Il concetto di funzione di trasferimento è valido pertanto non solo per i sistemi elettrici, ma si
estende anche a qualsiasi sistema lineare sia esso meccanico,termico od idraulico.
Riassumendo la funzione di trasferimento G(s) di un sistema è il rapporto tra la trasformata di Laplace della risposta U(s) e la trasformata di Laplace della sollecitazione
I(s) della sollecitazione ad esso applicata 1 .
G(s) =
U (s)
I (s)
(5)
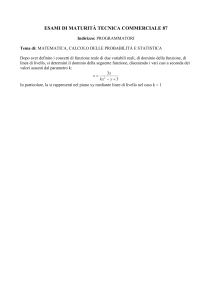
La conoscenza della funzione di trasferimento consente di ricavare la risposta del sistema se è
Vi(s)
G(s)
Vo(s)
Figura 2: La funzione di trasferimento
nota la sollecitazione, come si può vedere nei seguenti esempi.
Questo aspetto è molto importante perché nella pratica si ha interesse a conoscere l’evoluzione
di un sistema quando esso è sottoposto a sollecitazioni diverse.
1.2.1
Risposta all’impulso di Dirac
Consideriamo VI (s) = E, ovvero un impulso non unitario. Per trovare l’andamento della risposta
è necessario antitrasformare la seguente funzione razionale fratta:
VOpulse (s) = G (s) · E =
1
E
·
1
R · C s + RC
Il risultato della operazione di antitrasformazione è il seguente:
t
1
E
E
·
· e− R·C
=
vO pulse (t) = L−1
1
R · C s + R·C
R·C
1.2.2
Risposta al gradino
Applichiamo in ingresso alla rete RC un segnale a gradino non unitario, di ampiezza E, la cui
trasformata è pari a Es . la trasformata del segnale in uscita assume la seguente espressione:
VO step (s) = G (s) ·
1 Ovviamente
E
1
E
=
·
1
s
R · C s + R·C
·s
nell’ipotesi di condizioni iniziali nulle.
ITIS “J.F. Kennedy” – prof. Maurilio Bortolussi
5
Sviluppando l’espressione precedente in frazioni parziali ed applicando i procedimenti di antitrasformazione si ottiene:
t
E
E
−
vo step (t) = L−1
= E · 1 − e− R·C
1
s
s + R·C
1.3
Trasformazione dei componenti elettrici elementari
Il comportamento dei componenti elettrici elementari è regolato da relazioni funzionali nel dominio
del tempo che mettono in relazione tra loro tensione e corrente elettrica.
Applicando la trasformata di Laplace a tali relazioni possiamo ottenere delle corrispondenti
relazioni algebriche nel dominio della variabile s.
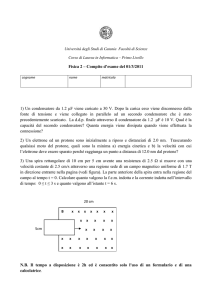
La tabella 1 riassume tale operazione di trasformazione. Si noti che nel caso del condensatore e
dell’induttore si deve tenere presente che le condizioni iniziali, rispettivamente la tensione iniziale
e la corrente iniziale, possono essere nulle o diverse da zero.
Figura 3: Bipoli elettrici elementari
Consideriamo per esempio il caso di un condensatore inizialmente carico ad una tensione V0
all’istante t=0.
d v (t)
i(t) = C ·
v (0) = VO
dt
Applicando le proprietà della trasformata di Laplace si ottiene:
I (s) = C · s · V (s) − C · V0
Dopo alcuni passaggi si ottiene:
V (s) =
V0
1
· I (s) +
C ·s
s
L’espressione precedente si traduce circuitalmente nel modello equivalente del condensatore carico.
1
Esso consiste in una impedenza di valore ZC = C·s
in serie ad un generatore di tensione di valore
V0
pari a s , come si si può osservare riportato in figura 4.
Se si associa a ciascun componente elettrico elementare la sua impedenza generalizzata risulta
relativamente agevole determinare la funzione di trasferimento di sistemi più complessi della rete
RC.
1.3.1
Esempi
1. Rete LR
Sia data la rete elettrica di figura 5 a cui viene applicata in ingresso una sollecitazione in
tensione a gradino, di ampiezza 5V, e che l’induttore sia inizialmente scarico, determinare:
6
Sistemi nel dominio del tempo - v. 0.1
Figura 4: Condensatore carico
Tabella 1: Componenti elettrici elementari
Componente
Resistore
Condensatore inizialmente scarico
Condensatore inizialmente carico
Induttore inizialmente scarico
Induttore inizialmente carico
Relazione nel dominio
di t
v (t) = R · i (t)
Relazione nel dominio
di s
V (s) = R · I (s)
Legge di Ohm generalizzata
(s)
ZR = VI(s)
=R
i (t) = C · d v(t)
dt
i(t)
=
C ·
d v(t)
v
(0)
=
V
O
dt
i(t)
v (t) = L · d dt
i(t)
v(t) = L · d dt
i (0) =
IO
I (s) = C · s · V (s)
I (s) = C · s · V (s) − C ·
V0
ZC =
a
V (s) = L · s · I (s)
ZL = L · s
(a) La funzione di trasferimento G (s) =
1
C·s
V0 (s)
VI (s)
(b) L’espressione analitica dell’andamento temporale della risposta.
(c) I diagrammi temporali della sollecitazione e della risposta.
(d) I comandi MATLAB che permettono di tracciare la funzione.
Figura 5: Rete LR
Traccia di svolgimento
Applicando la regola del partitore di tensione possiamo scrivere la seguente relazione:
VO (s) =
R
· VI (s)
R+L·s
Da cui si ottiene:
G (s) =
L
R
1
·s+1
La funzione di trasferimento cosı̀ ottenuta è molto simile a quella ottenuta in precedenza
nel caso della rete RC, pertanto si può già intuire che l’espressione analitica e l’andamento
temporale delle risposte della rete LR all’impulso di Dirac e al gradino sono molto simili alle
risposte determinate nel caso della rete RC.
7
ITIS “J.F. Kennedy” – prof. Maurilio Bortolussi
1.4
Funzione di trasferimento di una rete RLC
Si consideri, ad esempio, una rete elettrica RLC composta da un resistore, un induttore e da
un condensatore. Ipotizziamo, per ora, che l’induttore ed il condensatore siano completamente
scarichi all’istante t=0.
Per ricavare la funzione di trasferimento si applicano a ciascun elemento della rete le regole
di trasformazione riportate nella tabella precedente. In tal modo si ottiene una rete elettrica
“trasformata”.
Figura 6: Rete RLC trasformata
Applicando il secondo principio di Khirchoff possiamo scrivere la seguente relazione:
VI (s) = VR (s) + VL (s) + VO (s) = ZR · I (s) + ZI · I (s) + VO (s)
Tenendo conto che I (s) =
di trasferimento:
VO (s)
ZC
e dopo alcuni passaggi algebrici si intravvede già la funzione
VO (s) =
1
ZL
ZC
+
ZR
ZC
+1
· VI (s)
1
Poiché ZR = R, ZC = C·s
, ZL = L · s si ottiene:
Dividendo ambo i mebri della relazione precedente si ottiene la funzione di trasferimento:
G (s) =
1
L · C · s2 + R · C · s + 1
A questo punto si è in grado di conoscere l’evoluzione del sistema elettrico RLC quando esso
è sottoposto a sollecitazioni diverse.
1.5
Ordine di un sistema
Si è già visto che i sistemi si comportano in modo diverso a seconda della presenza o assenza di
accumulatori di energia (cfr. modelli statici e modelli dinamici). In realtà, nel caso dei sistemi
dinamici, si ha una ulteriore differenziazione di comportamento a seconda del numero di elementi
di accumulatori di energia indipendenti presenti nel sistema stesso.
Il numero di elementi accumulatori di energia è in stretta relazione con l’ordine dell’equazione
differenziale che descrive il funzionamento dinamico del sistema, ed è per questo indicato anche
come ordine del sistema stesso.
1.5.1
Sistemi di ordine 0
Nei sistemi di ordine 0 non sono presenti elementi accumulatori di energia e pertanto le relazioni
funzionali tra le sollecitazioni applicate e le corrispondenti risposte sono costituite da semplici
equazioni algebriche. La funzione di trasferimento si riduce in questo caso ad una semplice costante
indipendente dalla variabile complessa s.
G (s) = k
8
Sistemi nel dominio del tempo - v. 0.1
Si rammenta che una equazione algebrica può essere vista come una equazione differenziale di
ordine 0.
Nei sistemi di ordine 0, detti anche sistemi algebrici, l’uscita dipende istante per istante solo
dall’ingresso. Ciò equivale a dire che i sistemi di ordine 0 sono sistemi statici, ovvero senza
memoria.
Restando nell’ambito elettrico, esempio di sistemi di ordine 0 sono le reti elettriche costituite
da sole resistenze come, ad esempio, quella riportata nella seguente figura. In questo caso la G(s)
Figura 7: Sistema di ordine 0: schema elettrico e schema a blocchi
si riduce ad una costante, come la seguente espressione evidenzia:
G (s) =
1.5.2
R2
R1 + R2
Sistemi del primo ordine
I sistemi del primo ordine sono costituiti da un solo accumulatore indipendente di energia e da
elementi dissipatori . Vediamo alcuni esempi:
• sistema elettrico (condensatore + resistore), (induttore + resistore)
• sistema meccanico (molla+smorzatore)
• sistema termico (capacità termica + resistenza termica)
Tutti i precedenti sistemi del primo ordine sono caratterizzati dalla seguente equazione differenziale lineare del primo ordine:
τ·
d u (t)
+ u (t) = k · i (t)
dt
dove i(t) e u(t) rappresentano rispettivamente la sollecitazione e la risposta. Essa porta ad
una funzione di trasferimento del tipo:
G (s) =
k
τ ·s+1
La costante τ è denominata anche costante di tempo del sistema e si esprime in secondi.
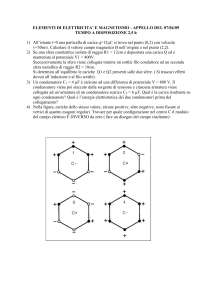
Esempio di sistema del primo ordine Si riportano gli andamenti temporali delle risposte di
una rete RC all’impulso di Dirac ed al gradino nell’ipotesi che R = 1kΩ e C = 100µF e l’ampiezza
E della sollecitazione di ingresso sia pari a 5V. In questo caso τ = RC e la funzione di trasferimento
G(s) è pari a:
1
G (s) =
0.1 · s + 1
Per determinare i grafici della risposta all’impulso e al gradino si è utilizzato il software MATLAB.
Qui di seguito è riportato il testo dello file di script utilizzato.
% Sistema 1˚ ordine
% Risposta all’impulso ed al gradino
ITIS “J.F. Kennedy” – prof. Maurilio Bortolussi
9
n1 = [5]; d1 = [0.1 1]
t= [0:0.01:1]
[yp,x,t] = impulse(n1,d1,t)
[ys,x,t] = step(n1,d1,t)
subplot(2,1,1); plot(t,yp)
title(’Risposta all’’impulso’)
xlabel(’t [s]’)
ylabel(’u(t)’)
subplot(2,1,2); plot(t,ys)
title(’Risposta al gradino’)
xlabel(’t [s]’)
ylabel(’u(t)’)
Figura 8: Risposta di un sistema del primo ordine all’impulso e al gradino
1.5.3
Sistemi del secondo ordine
Essi sono costituiti da due accumulatori indipendenti di energia e da elementi dissipatori . I
sistemi del secondo ordine sono notevolmente diffusi in natura; essi descrivono una grande varietà
di fenomeni ondulatori. Alcuni esempi sono il circuito RCL, sistemi meccanici in cui sono presenti
masse e molle, i motori in c.c. a magnete permanente.
Tutti i precedenti sistemi del secondo ordine sono caratterizzati dalla seguente equazione
differenziale lineare del secondo ordine:
τ1 · τ 2 ·
du (t)
d2 u (t)
+ τ2 ·
+ u (t) = k · i (t)
2
dt
dt
(6)
dove i(t) e u(t) rappresentano rispettivamente la sollecitazione e la risposta. Essa porta ad una
10
Sistemi nel dominio del tempo - v. 0.1
funzione di trasferimento il cui denominatore è un polinomio in s di secondo grado del tipo:
G (s) =
k
τ1 · τ2 · s2 + τ2 · s + 1
(7)
Le costanti τ1 e τ2 sono denominate costanti tempo del sistema, si esprimono in secondi e
dipendono dai parametri del sistema. E’ interessante osservare che questo sistema ammette due
poli complessi coniugati quando è soddisfatta la seguente condizione:
τ2 < 4 · τ 1
Esempio di sistema del secondo ordine
riportato nella figura 9:
(8)
Si consideri il sistema costituito dal circuito RCL
Figura 9: Un esempio di sistema del secondo ordine
In questo caso la funzione di trasferimento è pari a:
G (s) =
1
L · C · s2 + R · C · s + 1
(9)
L
e τ2 = R · C. Si può notare che τ1 coincide con la costante tempo del circuito RL e τ2
e τ1 = R
coincide con la costante tempo del circuito RC. Poiché nel caso specifico di figura si ha che τ1 =
0.01s e τ2 = 0.05s la G(s) diventa:
T RIALREST RICT ION
Per determinare le risposte si è utilizzato anche in questo caso il seguente M-file MATLAB:
% Sistema 2˚ ordine
% Risposta all’impulso ed al gradino
n1 = [5]; d1 = [500e-6 0.05 1]
t= [0:0.001:0.4]
[yp,x,t] = impulse(n1,d1,t)
[ys,x,t] = step(n1,d1,t)
subplot(2,1,1); plot(t,yp)
title(’Risposta all’’impulso’)
xlabel(’t [s]’)
ylabel(’u(t)’)
subplot(2,1,2); plot(t,ys)
title(’Risposta al gradino’)
xlabel(’t [s]’)
ylabel(’u(t)’)
1.6
Risposta al gradino di un sistema del secondo ordine
Il comportamento di un sistema del secondo ordine è generalmente più complesso di quello di un
sistema del primo ordine. In particolare, in base ai valori assunti dalle due costanti tempo τ1 e τ2
, e quindi dai parametri si possono distinguere tre casi:
• τ22 > 4 · τ1 · τ2
ITIS “J.F. Kennedy” – prof. Maurilio Bortolussi
11
Figura 10: Risposta di un sistema del secondo ordine all’impulso e al gradino
• τ22 = 4 · τ1 · τ2
• τ22 < 4 · τ1 · τ2
A ciascuna di queste tre condizioni corrisponde una particolare configurazione dei due poli della
funzione di trasferimento, come si avrà modo di vedere nei prossimi paragrafi.
1.6.1
Caso τ22 > 4 · τ1 · τ2
In questo caso i poli della funzione di trasferimento sono reali e negativi e giacciono nel semipiano
sinistro del piano complesso. La risposta del sistema è esponenziale crescente asintotica e quindi
aperiodica. Essa assomiglia fortemente alla risposta di un sistema del primo ordine. La u(t)
assume un andamento esponenziale crescente asintotico.
1.6.2
Caso τ22 = 4 · τ1 · τ2
I poli della funzione di trasferimento sono ancora reali e negativi ma sono coincidenti. Questa è la
condizione limite oltre la quale si ottiene un andamento temporale notevolmente differente, come
si potrà osservare più avanti. Nel caso pratico in esame la condizione è soddisfatta se si pone, ad
esempio, C = 400µF.
La u(t) assume un andamento esponenziale crescente asintotico, ma essa raggiunge la condizione di regime in un tempo minore rispetto al precedente.
1.6.3
Caso τ22 > 4 · τ1 · τ2
In questo caso i due poli della funzione di trasferimento sono complessi coniugati, a parte reale
ancora negativa. La presenza dei poli complessi coniugati impone una componente sinusoidale, e
quindi oscillatoria, alla risposta. Tale situazione si ottiene, ad esempio, se riduciamo ulteriormente
la capacità a 50 µF.
Dalla figura si può notare che siamo in presenza di un andamento oscillatorio smorzato. Si
dice anche che il sistema del 2◦ ordine è sottosmorzato. La pulsazione ωn del moto oscillatorio
smorzato è la pulsazione naturale del sistema in assenza di fenomeni dissipativi. Essa dipende dai
parametri del sistema.
12
Sistemi nel dominio del tempo - v. 0.1
Figura 11: Risposta al gradino: due poli reali distinti
Figura 12: Risposta al gradino di un sistema del secondo ordine: due poli reali coincidenti
13
ITIS “J.F. Kennedy” – prof. Maurilio Bortolussi
Figura 13: Risposta al gradino con poli complessi coniugati
1.6.4
Parametri della risposta al gradino
I sistemi del secondo ordine sono di particolare interesse perché i sistemi retroazionati2 , anche se
di ordine elevato, presentano una risposta analoga a quella dei sistemi del secondo ordine. Ciò
accade perché la loro configurazione poli-zeri è caratterizzata dalla presenza di una coppia di poli
dominanti3 complessi coniugati.
I principali parametri temporali della risposta al gradino sono:
S massima sovraelongazione (overshot)
TR Tempo di ritardo (delay time)
valore finale.
TS tempo di salita (rise time)
TA tempo di assestamento
Essa è normalmente espressa in % del valore finale.
Esso è il tempo necessario per raggiungere il 50% del
Tempo necessario per passare dal 10% al 90% del valore finale.
tempo occorrente perché si assesti entro il 5% del valore finale.
TM tempo di massima sovraelongazione
sovraelongazione
2I
Istante di tempo in cui si presenta la massima
sistemi retroazionati sono una delle tipologie più importanti di sistemi di controllo automatico.
poli dominanti sono quelli più vicini all’asse immaginario, il cui contributo nell’espressione del transitorio è
notevolmente più importante rispetto a quello degli altri poli.
3I
14
Sistemi nel dominio del tempo - v. 0.1
1.7
Modello matematico del motore in c.c. a magneti permanenti
Un motore elettrico è un sistema dinamico in cui avvengono trasformazioni di energia elettrica,
meccanica e termica. Possiamo quindi distinguere:
• Un transitorio elettrico che riguarda direttamente le correnti e le f.e.m. dei circuiti interessanti
• Un transitorio meccanico legato direttamente alla coppia della macchina
• Un transitorio termico che riguarda la temperatura della macchina.
Il transitorio termico, però, a causa della sua notevole durata rispetto al transitorio elettrico ed al
transitorio termico viene tenuto separato rispetto a questi due ultimi. Infatti l’ordine di grandezza
delle costanti tempo è di circa 1÷100 ms per i fenomeni elettromagnetici, di 10 ms ÷10s per i
fenomeni meccanici e di parecchi minuti per i fenomeni termici.
Figura 14: Modello elettrico del motore in corrente continua ad eccitazione indipendente
Le equazioni che descrivono il comportamento elettrico e meccanico del motore in c.c. sono:
vA (t) = RA · iA (t) + LA ·
diA (t)
+ eC (t)
dt
(10)
eC (t) = KE · ω (t)
(11)
CM (t) = KT · iA (t)
(12)
dω (t)
+ KAV · ω (t) + CR (t)
(13)
dt
La (10) è l’equazione elettrica del circuito
di armatura. In (11) KE è la costante di tensione fornita
·s
dal costruttore; essa si misura in Vrad
.
T RIALREST RICT ION dove KT è la costante di coppia T RIALREST RICT ION ,
T RIALREST RICT ION equazione meccanica del rotore
Trasformando con Laplace ciascuna delle precedenti equazioni ed ipotizzando condizioni iniziali
nulle si ottiene rispettivamente:
CM (t) = J ·
T RIALREST RICT ION
T RIALREST RICT ION
T RIALREST RICT ION
T RIALREST RICT ION
ITIS “J.F. Kennedy” – prof. Maurilio Bortolussi
15
Dalla prima delle precedenti equazioni si ottiene:
T RIALREST RICT ION
che tradotto in schemi a blocchi si traduce nel seguente schema
TRIAL RESTRICTION
Dalla seconda e terza equazione si ottiene:
TRIAL RESTRICTION
Infine dall’equazione meccanica si deduce la seguente relazione:
T RIALREST RICT ION
che da luogo allo schema a blocchi finale
TRIAL RESTRICTION
Si possono notare le due costanti tempo del motore, la costante tempo meccanica T RIALREST RICT ION
e la costante tempo elettrica T RIALREST RICT ION . Normalmente accade che T RIALREST RICT ION .
16
Sistemi nel dominio del tempo - v. 0.1
1.8
Domande
1. A cosa serve la trasformata di Laplace ? (max.3 righe).
2. Dare una definizione di funzione di trasferimento (max.3 righe).
1.9
Esercizi
1. Rete RL
Sia data la rete elettrica riportata in figura 15con R = 2.2 kΩ e L = 220 mH.
Figura 15: Rete RL
Ad essa viene applicata in ingresso una sollecitazione in tensione a gradino di ampiezza 5V.
Nell’ipotesi che l’induttore sia inizialmente scarico, determinare:
(a) La funzione di trasferimento G (s) =
V0 (s)
VI (s)
(b) L’espressione analitica dell’andamento temporale della risposta.
(c) I comandi MATLAB che permettono di tracciare su un solo diagramma i grafici della
sollecitazione e della risposta.
(d) Ripetere i tre punti precedenti nell’ipotesi che l’induttore sia inizialmente carico con
una corrente I0 = 2mA.
Svolgimento:
Punto a. Dalla regola del partitore di tensione si ottiene la seguente relazione:
VO (s) =
L·s
ZL
· VI (s) =
· VI (s)
ZL + ZR
L·s+R
Da cui si ha:
∆
G (s) =
L·s
VO (s)
=
VI (s)
L·s+R
Punto b. La trasformata VI (s) di un segnale a gradino di ampiezza E è pari a Es . Sostituendo nell’espressione precedente, e semplificando, si ottiene la trasformata della risposta.
VO (s) =
E
E
L·s
·
=
L·s+R s
s+ R
L
Da cui antitrasformando si ottiene:
R
vo (t) = E · e− L ·t
La risposta è una funzione esponenziale decrescente che tende a zero a regime con una
L
.
costante tempo τ = R
17
ITIS “J.F. Kennedy” – prof. Maurilio Bortolussi
2. Rete RCL
Si aggiunga in serie alla resistenza della rete RL dell’esercizio precedente un condensatore
da 10 µF .
Nell’ipotesi che sia il condensatore che l’induttore siano inizialmente scarichi, determinare:
(a) La funzione di trasferimento G (s) =
V0 (s)
VI (s)
(b) L’espressione analitica dell’andamento temporale della risposta.
(c) I comandi MATLAB che permettono di tracciare su un solo diagramma i grafici della
sollecitazione e della risposta.
18
Sistemi nel dominio del tempo - v. 0.1
1.10
1.10.1
Laboratorio
Lab. 5: Analisi sperimentale nel dominio del tempo della risposta al gradino
di una rete RC e di una rete CR
Schema elettrico
TRIAL RESTRICTION
Obiettivi didattici
• Saper misurare i parametri fondamentali di due forme d’onda mediante l’oscilloscopio
• Conoscere le risposte nel dominio del tempo di una rete RC e di una rete CR
Strumentazione ed attrezzatura
• Generatore di funzioni, oscilloscopio, un multimetro, tre sonde BNC-coccodrillo 1:1, una
breadboard
Componenti
Una rete RC come da schema
Procedimento
1. Dopo aver ricevuto i componenti, gli strumenti e l’attrezzatura necessaria redarre personalmente la lista componenti e l’elenco della strumentazione ed attrezzatura seguendo le
indicazioni generali per la stesura di una relazione di laboratorio.
2. Calcolare la costante tempo nominale τn della rete RC, in base ai valori nominali di R e di
C.
3. Calcolare le costanti tempo minima τmin e massima τmax in base alle tolleranze dei componenti utilizzati.
4. Applicare in ingresso al circuito un segnale TTL compatibile di periodo T ∼
= 10 ÷12 τn .
5. Visualizzare con l’oscilloscopio in DC le forme d’onda di ingresso e di uscita applicando lo
stesso riferimento di tensione.
6. Si misurino i parametri T, f, Vp , Vpp e Vm per la tensione di ingresso vI e la tensione di
uscita vO , analizzando le forme d’onda, e si misuri il valore efficace Vrms di vI e di vO
mediante il multimetro.
7. Misurare la costante tempo sperimentale τsp .
8. Si riportino su un apposito diagramma le tensioni di ingresso e di uscita evidenziando la
costante tempo sperimentale.
9. Ripetere i punti da 2 a 9 invertendo il condensatore con il resistore.
Domande
• Cosa succede se invece di applicare in ingresso una onda quadra di periodo 10 τn si applica
un segnale di frequenza minore (più lento) od un segnale di frequenza maggiore (più veloce)
?.