Capitolo 3
I PRINCIPI DELLA DINAMICA
3.1
Introduzione
In questo capitolo ci occuperemo della meccanica del punto materiale. Studieremo cioè quali sono
le leggi che regolano i movimenti dei punti materiali.
Per prima cosa occorre definire cosa si intende per punti materiali. Spesso accade che i sistemi
sotto studio, pur avendo dimensioni proprie siano molto piccoli rispetto alle distanze in gioco, ad
esempio rispetto alla distanza di osservazione. Per fare un esempio, la stella α − Centauri è un
oggetto abbastanza grande ma, quando osservato dalla Terra, appare cos ì piccolo che eventuali suoi
moti interni non sono osservabili: esso può essere quindi trattato come un punto materiale.
Volendo descrivere i movimenti dei punti dobbiamo iniziare col definire quali sono le variabili che
definiscono lo stato di un punto. A tale scopo dobbiamo definire la variabile posizione. Essa costituisce appunto la grandezza la cui variabilità esprime il movimento del punto. Costruiamo pertanto
un sistema di riferimento ossia tre assi mutuamente perpendicolari su ognuno dei quali sia definita
una unità di misura della lunghezza (vedi Figura 3.1). E’ opportuno ricordare che tale sistema di
riferimento si distingue dal sistema di assi cartesiani poiché in questo caso è specificato che su tre assi
si misura una lunghezza, cosa non sempre vera nel caso di un generico sistema di assi cartesiani.
Figura 3.1: Sistema di assi cartesiani ortogonali.
Una volta definito il sistema di riferimento ogni punto verrà univocamente determinato una volta
che siano assegnate le sue coordinate. In maniera alternativa potremo rappresentare un punto P per
mezzo del raggio vettore ~r le cui componenti non sono altro che le coordinate del punto P .
La posizione di un punto è pertanto una grandezza vettoriale, dimensionale la cui unità di misura
nel sistema MKS è il metro (m).
Tale unità di misura è definita come 1650763.73 volte la lunghezza d’onda nel vuoto di una
particolare riga d’emissione del Kr 86 .
Nei paesi anglosassoni è d’uso adoperare altre unità ed in particolare il piede (ft), tale che 1 ft=
0.3048 m, ed i suoi multipli e sottomultipli (tra i quali citiamo la yard).
37
38
CAPITOLO 3. I PRINCIPI DELLA DINAMICA
In campo astronomico, poi, viene utilizzata un’altra unità di misura ovvero l’anno luce, definito
come lo spazio percorso dalla luce in un anno; esso è tale che 1 a.l. = 9.46 10 15 m.
Nella fisica atomica viene invece adoperata una unità di misura diversa, cioè l’ Å ngströem (Å) tale
che 1 Å= 10−10 m.
Nel seguito vedremo che talvolta non conviene trattare il movimento di un punto utilizzando la
sua posizione ma piuttosto l’angolo che il raggio vettore forma con una retta predeterminata. Occorre
pertanto richiamare un attimo la definizione di angolo piano. A tale scopo consideriamo un arco di
circonferenza, di raggio r, e due raggi: si chiama angolo la porzione di piano compresa tra i due raggi
e l’arco di circonferenza. La sua misura si ottiene dal rapporto tra l’arco di circonferenza ed il raggio.
Ne consegue che l’angolo è una grandezza adimensionale; pur tuttavia è d’uso attribuire all’angolo
una unità di misura e cioè il radiante: α = s/r.
Una definizione analoga porta a considera l’angolo sferico come quella porzione di spazio compresa tra un cono ed una porzione di sfera. La sua misura in steradianti è definita come il rapporto
tra l’area A della porzione di sfera ed il quadrato del raggio r della sfera stessa: Ω = A/r 2 .
3.2
La velocità di un punto
Consideriamo ora un punto P e studiamo come varia la sua posizione nel corso del tempo. Per
semplicità trattiamo dapprima il caso unidimensionale.
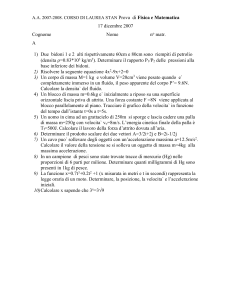
In questo caso possiamo rappresentare la funzione che esprime l’andamento della posizione in funzione del tempo come una curva in un grafico (Figura 3.2) in cui sull’asse delle ascisse sia rappresentato
il tempo e su quello delle ordinate sia invece rappresentata la posizione del punto.
Figura 3.2: Grafico della posizione in funzione del tempo e velocità media.
Consideriamo un istante to cui corrisponde la posizione xo . In un successivo istante t il punto si è
spostato in P , cui corrisponde la posizione x.
Il rapporto
x − xo
vm =
t − to
rappresenta la velocità media di P nell’intervallo di tempo da t o a t.
Nel grafico possiamo osservare che tale velocità media è misurata dal valore della tangente trigonometrica dell’angolo αm che è formato dalla secante alla curva nei punti P o e P , rispetto all’asse delle
ascisse.
Consideriamo di nuovo il nostro punto e calcoliamo la velocità media per diversi intervalli di tempo,
sempre più piccoli.
Dal grafico si nota che, all’avvicinarsi di t a t o , il punto P tende a divenire sempre più vicino a P o
e contemporaneamente la secante per P o e P tende a divenire la tangente alla curva in P o .
Il valore della velocità media, durante questo processo, varierà, pur rimanendo sempre uguale al
valore della tangente trigonometrica dell’angolo α m che la secante forma con l’asse delle ascisse.
39
3.2. LA VELOCITÀ DI UN PUNTO
Ci si può porre allora il problema di cosa accade alla velocità media quando l’intervallo di tempo
entro cui essa è calcolata è così piccolo da non essere numerabile, da essere cioè quel che in matematica
si chiama un infinitesimo.
La risposta può essere data immediatamente sulla base dell’interpretazione geometrica: il valore
limite della velocità media non sarà altro che il valore della tangente trigonometrica dell’angolo che la
tangente geometrica alla curva nel punto P o forma con l’asse delle ascisse.
Abbiamo definito quindi la velocità istantanea del punto P . In formula scriveremo:
v = lim
t→to
dx
x − xo
=
t − to
dt
Nella formula precedente abbiamo adoperato un simbolo matematico che rappresenta appunto il
concetto ora espresso di passaggio al limite. Esso prende il nome di derivata. Diremo pertanto che
la velocità istantanea è la derivata della posizione rispetto al tempo.
Per estendere il concetto di velocità ad uno spazio tridimensionale basta ora ripetere tre volte il
discorso fatto precedentemente, una per ognuna delle componenti del vettore posizione. Dette x, y e
z queste tre componenti avremo così definito tre grandezze
vy =
dx
dt
dy
dt
vz =
dz
dt
vx =
dal che resta definito un vettore ~v ≡ (v x , vy , vz ) che schematicamente può essere indicato da
~v =
d~s
dt
ove ~s è il vettore posizione di P .
E’ opportuna ora una piccola digressione matematica sul significato dei simboli adoperati. Le
quantità d~s e dt rappresentano degli incrementi dello spazio e del tempo, e sono detti differenziali.
Il loro valore è tanto piccolo da non poter essere assimilabile altro che a zero. E’ per questo che una
equazione contenente differenziali deve sempre eguagliare due termini entrambi contenenti differenziali.
A parte questa considerazione, i differenziali vanno trattati come una qualsiasi grandezza algebrica.
s
Ad esempio da ~v = d~
s = ~v dt .
dt , moltiplicando ambo i membri per dt si ottiene d~
Questa formula può essere letta affermando che durante un intervallo di tempo dt un punto che si
muove in quell’intervallo di tempo (tanto piccolo da poter essere confuso con un istante) con velocità
istantanea ~v , percorre uno spazio d~s. Per poter ottenere lo spazio percorso in un intervallo di tempo
finito, compreso tra i tempi t1 e t2 occorre sommare tutti gli intervalli di spazio infinitesimi. Tale
operazione di somma deve essere distinta dalla ordinaria somma poiché si riferisce alla somma di
infiniti termini ognuno dei quali è un infinitesimo. Si usa allora il simbolo di integrale della velocità
nel tempo e lo si indica con
Z
t2
~s2 − ~s1 =
~v dt
t1
che viene letto come “integrale esteso da t 1 a t2 ”.
Dal punto di vista matematico l’operazione di integrale e quella di derivata costituiscono l’una
l’operazione inversa dell’altra nel senso che se si esegue la derivata dell’integrale di una funzione si
ottiene la funzione stessa.
Vediamo ora come si può calcolare l’integrale in un caso particolarmente semplice e cioè quando
~v = ~vo =costante.
In tal caso, qualunque sia l’istante di tempo considerato la velocità è costante e quindi nell’eseguire
la somma degli infiniti termini d~s = ~v dt si può mettere in evidenza il termine ~v o per cui in realtà si
ottiene la sola somma degli intervalli infinitesimi del tempo. Tale somma non è altro che l’intervallo
finito di tempo e pertanto abbiamo che:
~s2 − ~s1 = ~vo (t2 − t1 )
40
CAPITOLO 3. I PRINCIPI DELLA DINAMICA
Se si usa come t1 il tempo iniziale, cioè t1 = to = 0 abbiamo:
~s(t) = ~so + ~vo t
che rappresenta l’equazione oraria del moto rettilineo uniforme.
Abbiamo quindi che il moto rettilineo uniforme è regolato dalle due equazioni:
~v (t) = ~vo = costante
~s(t) = ~so + ~vo t
E’ da notare che poiché il vettore è costante, in particolare esso ha sempre la stessa direzione e
quindi il moto avviene su una retta. Spesso si scrivono le due equazioni precedenti per gli scalari
velocità e posizione, proprio perché il moto si può ricondurre ad un moto unidimensionale e quindi è
rappresentabile anche con degli scalari.
Dalla definizione stessa della velocità si nota che, dimensionalmente, la velocità è una lunghezza
diviso un tempo:
[v] = [L T −1 ]
e viene misurata, nel sistema MKS, in metri al secondo (m/s).
Nell’uso comune è presente anche l’unità di misura chilometri all’ora (km/h), tale che 1 m/s=
3.6 km/h.
3.3
La accelerazione di un punto
Così come a partire dalla variazione nel tempo della posizione abbiamo definito la velocità, è possibile, partendo dalla variazione nel tempo della velocità, definire una nuova grandezza che chiameremo
accelerazione. E’ quindi possibile definire l’accelerazione media come il rapporto tra la variazione
di velocità e l’intervallo di tempo in cui si è prodotta tale variazione. A partire da questa è poi possibile
definire l’accelerazione istantanea come la derivata prima della velocità nel tempo ovvero come la
derivata seconda dello spazio nel tempo. In formula abbiamo:
~a =
d~v
d2~s
= 2
dt
dt
Dimensionalmente l’accelerazione è una lunghezza diviso un tempo al quadrato:
[a] = [L T −2 ]
e, nel sistema MKS, viene misurata in metri al secondo quadro (m/s 2 ).
Procedendo analogamente a quanto fatto precedentemente possiamo ricavare la velocità nel caso
di accelerazione costante ed otteniamo:
~v (t) = ~vo + ~a t
Con una successiva integrazione possiamo ricavare l’equazione oraria del moto uniformemente
accelerato:
1
~s(t) = ~so + ~vo t + ~a t2
2
Come nel caso precedente di moto rettilineo uniforme, siamo qui pervenuti alle equazioni fondamentali che regolano il moto uniformemente accelerato e cioè:
~a(t) = costante
~v (t) = ~vo + ~a t
~s(t) = ~so + ~vo t +
1
2
~a t2
3.4. CONCETTO DI FORZA
41
Non è necessariamente vero che questo moto avvenga lungo una retta poiché esso dipende sia dalla
direzione dell’accelerazione che da quella della velocità. Avremo pertanto che solo nel caso in cui
queste due direzioni sono coincidenti il moto si svolgerà lungo una retta mentre negli altri casi esso si
svolgerà lungo una curva piana, contenuta nel piano generato dalle direzioni della velocità e da quella
dell’accelerazione.
3.4
Concetto di forza
Dall’esperienza comune possiamo notare che ogni qualvolta esercitiamo una qualche azione su un
corpo questo si deforma. Ad esempio se prendiamo con una mano un oggetto vediamo che, se esso non
è rigido, sulla sua superficie appaiono i segni delle dita ad indicare l’esercitarsi di una azione sul corpo.
Tale azione prende il nome di forza. Diremo quindi che la forza è quell’ente fisico che deforma i corpi.
Tale azione di deformazione non appare se i corpi sono rigidi ma una attenta analisi mostra che in
realtà la deformazione esiste sempre, anche se molto piccola. L’aver definito la forza per mezzo delle
deformazioni subite dai corpi fornisce un immediato strumento di misura per le forze: le deformazioni
stesse. Consideriamo a tal scopo un corpo le cui deformazioni siano facilmente osservabili, ad esempio
una molla la cui lunghezza sia facilmente misurabile. Questo strumento verrà detto dinamometro.
Due forze saranno uguali se produrranno uguali deformazioni mentre una forza sarà il doppio di
un’altra se essa produrrà una deformazione doppia. In formula diremo che il valore della forza è direttamente proporzionale alla variazione di lunghezza della molla, tramite un coefficiente di proporzionalità
dipendente dalla molla: F = k l.
E’ facilmente osservabile, poi, che due forze possono produrre deformazioni uguali in modulo ma
in direzioni diverse; ciò significa che la forza è un vettore. La relazione precedente sarà allora scritta
come:
F~ = k ~l
Nel sistema MKS la forza si misura in Newton (N) ma vengono anche utilizzate le unità del
kilogrammo-peso (kgp) tale che 1 kgp = 9.80665 N e (nei paesi anglosassoni) la libbra-peso (lbf) tale
che 1 lbf= 4.44822 N.
3.5
I tre principi della dinamica
Avendo definito le principali grandezze fisiche possiamo ora passare ad enunciare i tre principi della
dinamica, che costituiscono il fulcro intorno al quale è costruita tutta la meccanica.
Tali principi hanno una natura completamente sperimentale, nel senso che essi sono stati dedotti
semplicemente dalle esperienze fisiche: tale tecnica, ovvero il far nascere tutte le affermazione soltanto
dalla base di esperienze fisiche ripetibili da tutti, costituisce la base del metodo scientifico che, già
enunciato informalmente da Galilei, ha permesso lo sviluppo di tutta la scienza moderna, superando una visione della natura (basata sulla superstizione e sulla ideologia) che aveva profondamente
influenzato le civiltà umane nei secoli precedenti.
I tre principi della dinamica furono, per la prima volta, enunciati in maniera cosciente da Newton,
anche se una loro scoperta è attribuibile ad altri scienziati prima di lui. Fu però merito di Newton
comprendere il pieno significato di tali principi e da essi far discendere tutta la meccanica classica.
Gli enunciati che noi daremo qui di seguito differiscono lievemente da quelli newtoniani ma solo
nella forma e non nella sostanza.
• Primo principio della dinamica:
Un sistema di riferimento rispetto cui un corpo non soggetto a forze o sta fermo o si muove di
moto rettilineo è detto sistema di riferimento inerziale.
• Secondo principio della dinamica:
Un corpo soggetto ad una forza F~ si muove, rispetto ad un sistema di riferimento inerziale, con
42
CAPITOLO 3. I PRINCIPI DELLA DINAMICA
una accelerazione ~a proporzionale alla forza applicata. La costante di proporzionalità dipende
solo dal corpo ed è detta massa del corpo m . In formula abbiamo che:
F~ = m ~a
• Terzo principio della dinamica:
Dati due corpi, indicati con 1 e 2, se il corpo 1 esercita sul corpo 2 una forza F~12 , allora il corpo
2 esercita sul corpo 1 una forza F~21 uguale e contraria. In formula:
F~12 = −F~21
Come si vede il I principio della dinamica viene adoperato per definire una classe di sistemi di
riferimento, detti sistemi inerziali rispetto ai quali viene enunciato il II principio della dinamica. Il
sistema di riferimento inerziale per eccellenza è quello delle stelle fisse, cioè quello ottenuto prendendo
tre stelle non coplanari. Tali stelle, viste dalla Terra, appaiono immobili nella volta celeste e pertanto
sono dette fisse.
Questo sistema di riferimento non è molto pratico per le ordinarie esperienze fisiche. Si fa allora
riferimento ad altri sistemi più semplici. Ad esempio possiamo considerare un sistema centrato nel
Sole ed in cui un asse è diretta verso la Terra e gli altri due sono ortogonali. Tale sistema, rispetto
alle stelle fisse, è in moto rotatorio (segue il moto di rivoluzione della Terra intorno al Sole) ma, per
fenomeni che durano solo qualche giorno, si può ritenere che sia in moto rettilineo uniforme rispetto
alle stelle fisse e quindi è anche esso un sistema inerziale.
Per fenomeni ancora più brevi si può utilizzare un sistema di riferimento (detto sistema di laboratorio) basato semplicemente su tre assi solidali con la stanza nella quale si svolgono i fenomeni. Tale
sistema si muove con la Terra ma, per fenomeni che durano solo qualche minuto, si può approssimare
tale movimento con un moto rettilineo uniforme rispetto alle stelle fisse e pertanto anche esso può
essere considerato un sistema di riferimento inerziale.
Più in generale possiamo asserire che un qualsiasi sistema di riferimento che si muove di moto
rettilineo uniforme rispetto alle stelle fisse è un sistema di riferimento inerziale.
Infatti se un corpo, non soggetto a forze, si muove con velocità costante ~v rispetto ad sistema delle
~ = ~v + ~vo rispetto ad un secondo sistema che si muove di
stelle fisse allora si muoverà con velocità V
velocità ~vo rispetto a quello delle stelle fisse. Se ~v o è costante allora sarà costante anche la velocità del
corpo rispetto al secondo riferimento e quindi anche questo sarà inerziale.
Il secondo principio, invece, fornisce l’equazione fondamentale della dinamica: F~ = m~a che permette, una volta che sia nota la causa del moto (cioè la forza) di ricavare l’equazione del moto
~s = ~s(t).
Il secondo principio definisce una nuova grandezza cioè la massa. Per una sua misura occorre
utilizzare uno strumento cioè la bilancia. A tal scopo occorre definire una unità di massa. Per
confronto diretto con la massa campione è possibile determinare il valore numerico di una qualsiasi
massa. Da ciò si comprende che la massa è una grandezza dimensionale fondamentale e, nel sistema
MKS, viene misurata in chilogrammi (kg).
L’unità di massa, cioè 1 kg, è definita come la massa del corpo campione depositato presso un
apposito museo a Sevrès.
Nei paesi anglosassoni viene anche usata la libbra (lb) tale che 1 lb= 0.454 kg.
3.6
La relatività galileana
Come abbiamo visto nel paragrafo precedente, alla base dei principi della dinamica vi sono i sistemi
di riferimento inerziali. Di tali sistemi ne esistono infiniti e tutti sono collegati tra di loro perchè sono
reciprocamente fermi o si muovono di moto rettilineo uniforme.
Da punto di vista concettuale, alla base delle leggi fisiche vi è la relatività galileana ovvero il
principio in base al quale tutte le leggi fisiche devono essere invarianti in forma rispetto ad opportune
43
3.6. LA RELATIVITÀ GALILEANA
trasformazioni che fanno passare da un sistema di riferimento ad un altro. Le trasformazioni in
questione prendono il nome di trasformazioni galileane.
Per rendere il problema più semplice nella sua rappresentazione grafica consideriamo uno spazio
bidimensionale.
Consideriamo un primo sistema di riferimento, indicato in figura 3.3 con le lettere Oxy e che nel
seguito chiameremo sistema latino. Rispetto a tale sistema un punto P avrà coordinate (P x , Py ).
Figura 3.3: La posizione di un punto rispetto al riferimento latino
L’equazione del moto del punto P, in tale riferimento sarà allora:
~rP = ~rP 0 + ~vP t
e pertanto:
xP = x P 0 + v P x t
yP = y P 0 + v P y t
Consideriamo ora un nuovo sistema di riferimento ed indichiamolo con le lettere Ωζη; nel seguito lo
indicheremo col termine sistema greco. Supponiamo che tale sistema sia in quiete oppure si muove
di moto rettilineo uniforme rispetto al sistema latino.
Figura 3.4: Posizione di un riferimento rispetto ad un altro riferimento
La sua origine Ω avrà in generale una posizione, rispetto al sistema latino, descritta da un’equazione
del tipo
~rΩ = ~rΩ0 + ~vΩ t
e pertanto:
xΩ = xΩ0 + vΩx t
yΩ = yΩ0 + vΩy t
44
CAPITOLO 3. I PRINCIPI DELLA DINAMICA
Per differenziare i due sistemi utilizzeremo sempre le lettere latine x, y e t per indicare che ci si sta
riferendo al sistema latino mentre utilizzeremo le lettere greche ζ, η e τ per riferirci al sistema greco.
Facciamo ora una ipotesi che appare, per la nostra esperienza quotidiana, del tutto ragionevole e
cioè che gli orologi nei due sistemi di riferimento funzionino in maniera uguale e che pertanto, con una
opportuna scelta delle unità di misura risulti
t=τ
Consideriamo ora cosa accade per il punto P , visto dal sistema greco.
Figura 3.5: La posizione di un punto rispetto al riferimento greco
La sua posizione è rappresentata dall’equazione:
~P 0 + ω
~P t
ρ
~P = ρ
e pertanto:
ζP = ζ P 0 + ω P ζ τ
ηP = η P 0 + v P η τ
Per collegare le due rappresentazioni osserviamo la figura 3.6, nella quale sono riportati solo i punti
O, Ω e P con i relativi vettori posizione.
Figura 3.6: I vettori posizione delle origini dei riferimenti e del punto
Si vede immediatamente che:
~rP = ~rΩ + ρ
~P
per cui
~rP 0 + ~vP t = ~rΩ0 + ~vΩ t + ρ
~P 0 + ω
~P t
ovvero anche:
~rP 0 + ~vP t = (~rΩ0 + ρ
~P 0 ) + (~vΩ + ω
~P) t
3.7.
45
LA FORZA PESO
per cui
~vP = ~vΩ + ω
~P
e
~aP = ~aΩ + α
~P
In altre parole, se il sistema greco sta fermo o si muove di moto rettilineo uniforme rispetto al
sistema latino, allora le due accelerazioni del punto P nei due sistemi di riferimento, latino e greco,
sono uguali
~aP = α
~P
Possiamo allora concludere affermando che se il sistema greco è inerziale per cui un corpo P su
cui non agisce alcuna forza o sta fermo o si muove di moto rettilineo uniforme (la sua accelerazione
α
~ P = 0), allora anche rispetto al sistema latino il punto P o sta fermo o si muove di moto rettilineo
uniforme (la sua accelerazione ~aP = 0) e pertanto anche il sistema latino è inerziale.
E’ da notare che l’equazione esprimente il II principio è invariante in forma rispetto a trasformazioni
che fanno passare da un riferimento inerziale ad un altro. Infatti sia la forza che l’accelerazione sono
invarianti e quindi lo è anche il II principio. Questa caratteristica è fondamentale per una qualsiasi
relazione fisica. Se si vuole, infatti, che la natura sia vista in ugual maniera da ogni osservatore occorre
che le sue leggi siano uguali per tutti gli osservatori ovvero che esse siano invarianti in forma rispetto
a trasformazioni del sistema di riferimento.
La trasformazione che fa passare da un riferimento inerziale ad un altro anch’esso inerziale viene
detta trasformazione galileiana ed il principio in base al quale tutte le leggi devono essere invarianti
rispetto a trasformazioni galileiane è detto principio di relatività galileiana.
Il III principio della dinamica, nella formulazione precedentemente data prende anche il nome di
principio di azione e reazione.
3.7
La forza peso
Consideriamo un qualsiasi corpo e lasciamolo cadere. Se si prescinde dall’attrito con l’aria si può
osservare che il moto del corpo è un moto uniformemente accelerato, con accelerazione diretta verticalmente verso il basso, uguale per tutti i corpi. Tale accelerazione viene detta accelerazione di
gravità e vale:
g = 9.81 m/s2
Per il secondo principio della dinamica possiamo allora dire che sul corpo agisce una forza, detta
peso,
F =mg
diretta verticalmente verso il basso.
Si può verificare, utilizzando una molla la cui deformazione misuri il valore della forza, che tale
peso agisce anche se il corpo è fermo.
Diremo pertanto che un qualsiasi corpo di massa m, sulla Terra, è soggetto ad una forza peso data
da:
F~ = m ~g
ove ~g è un vettore diretto verticalmente verso il basso e con modulo:
|~g |= 9.81 m/s2
In realtà tale valore rappresenta solo un valore medio perché l’accelerazione di gravità varia da
luogo a luogo. In generale il valore di g è minore all’equatore e aumenta man mano che si va verso i
poli ove raggiunge un valore massimo. Ancora, man mano che si sale di quota il valore di g diminuisce.
Poiché, però, tali variazioni sono molto piccole esse vengono trascurate. Nel seguito, anzi, utilizzeremo una approssimazione ancora maggiore e scriveremo:
g ≈ 10 m/s2
46
CAPITOLO 3. I PRINCIPI DELLA DINAMICA
3.8
Il moto di un proiettile.
Come semplice applicazione della forza gravitazionale discutiamo cosa accade quando lanciamo un
proiettile con una velocità iniziale v o .
A tale scopo costruiamo un sistema di riferimento bidimensionale in cui l’asse x sia orizzontale e
l’asse y verticale, diretto verso l’alto (vedi Figura 3.7).
La velocità iniziale vo avrà due componenti: vo = (vo cos θ , vo sin θ) ove con θ abbiamo indicato
l’alzo ovvero l’angolo che il vettore velocità iniziale forma con l’asse delle x.
Figura 3.7: Situazione iniziale del moto del proiettile.
Poiché il corpo è soggetto alla sola forza di attrazione gravitazionale, che per la vicinanza alla
superfice terrestre riterremo costante e data da
F =ma
il moto del corpo sarà un moto uniformemente accelerato, la cui equazione oraria è
s = s 0 + v0 t +
1
a t2
2
Scomponiamo ora questa equazione oraria nelle sue componenti, tenendo presente che in questo
caso l’accelerazione è quella di gravità (diretta verticalmente verso il basso). Otteniamo:
x = x0 + v0X t
y = y0 + v0y t −
1
2
g t2
Supponiamo ora che il corpo parta dall’origine del riferimento. Si ha:
x = v0X t
y = v0y t −
1
2
g t2
Queste due equazioni costituiscono l’equazione parametrica della traiettoria seguita dal corpo. E’
possibile dimostrare che tale curva è una parabola simmetrica rispetto ad un asse verticale.
Un parametro molto importante del moto di un proiettile è la distanza che esso percorre prima di
raggiungere la stessa quota di partenza, cioè la gittata (vedi Figura 3.8).
Per calcolare la gittata basta porre y = 0 nell’equazione della traiettoria e risolvere nella variabile
tempo. Si ottengono le due soluzioni:
t=0
t=
2 v0y
g
47
3.8. IL MOTO DI UN PROIETTILE.
Figura 3.8: Traiettoria del proiettile.
La prima soluzione rappresenta il punto di partenza mentre la seconda è quella relativa alla gittata.
Si ha pertanto che la gittata xg è data da:
xg =
2 v0x v0y
2 v0 cos θ v0 sin θ
v2
=
= 0 sin 2θ
g
g
g
il chè mostra come la massima gittata si abbia per un alzo pari a 45 o mentre valori di alzo simmetrici
rispetto a 45o hanno gittate uguali, essendo
sin (45o + θ) = sin (45o − θ)
Un altro parametro molto importante è costituito dalla massima quota raggiunta (vedi Figura 3.8).
Per la simmetria della curva, questa deve essere raggiunta al tempo:
t=
v0y
g
e quindi la quota massima è:
yM AX
2
1 voy
=
2 g
Vediamo ora cosa accade se utilizziamo questa formula per velocità iniziali molto elevate, come
quelle assunte dai missili; ad esempio prendiamo ad esempio un oggetto lanciato verticalmente con
velocità iniziale pari a
vo = 10 km/s
La massima quota risulta
2
1 104
yM AX =
= 5 × 106 m
2 10
Il valore ottenuto è tanto elevato da non potersi più ritenere valida la formula approssimata per la
forza peso e quindi non sarà nemmeno valida l’equazione del moto ottenuta.
In questo caso, infatti, il moto sarà più complesso e la traiettoria seguita da un missile non è più
una parabola.
E’ interessante notare che un qualsiasi corpo di massa m, sulla superfice terrestre ha un’energia
potenziale data da:
M m
U =−G
R
Se ora forniamo a questo corpo una energia cinetica di pari entità risulterà che l’energia meccanica
totale sarà nulla e quindi sarà possibile che il corpo giunga all’infinito, ove ha energia potenziale
massima (cioè nulla) ed energia cinetica minima (cioè nulla). In tal caso avremo che il corpo si è
svincolato dall’attrazione gravitazionale terrestre.
48
CAPITOLO 3. I PRINCIPI DELLA DINAMICA
Calcoliamo la velocità v necessaria:
1
M m
m v2 − G
=0
2
R
per cui
v=
s
G
2M
= 11.23 km/s
R
Questa particolare velocità viene detta velocità di fuga.
3.9
La quantità di moto
Nella vita quotidiana è facile accorgersi che alcuni effetti possono prodursi sia con corpi di piccola
massa, ma elevata velocità che con corpi di elevata massa e bassa velocità. Sorge quindi naturale
attendersi che una grandezza fisica interessante possa ottenersi legando appunto la massa del corpo e
la sua velocità. La più semplice di queste grandezze è la quantità di moto (q.d.m.), od anche (pur
se meno frequentemente) momento, tale che per un corpo di massa m che si muove con velocità ~v è:
p
~ = m ~v
Consideriamo ora un corpo la cui massa non vari nel tempo. Si ha allora:
d~
p
d(m~v )
d~v
=
=m
= m ~a = F~
dt
dt
dt
L’uguaglianza tra il primo e l’ultimo termine costituisce un’altra formulazione del II principio della
dinamica. Essa, in realtà, è la formulazione preferibile poiché è possibile vedere che nei casi di sistemi
a massa variabile è questa ad essere vera e non la formulazione classica. Abbiamo allora:
• Secondo principio della dinamica:
La quantità di moto di un corpo soggetto ad una forza F~ varia nel tempo in maniera tale che,
rispetto ad un sistema di rifermento inerziale, la sua derivata prima rispetto al tempo è uguale
alla forza stessa. Ovvero:
d~
p
F~ =
dt
Vedremo nel seguito che la quantità di moto è molto importante poichè essa permette di definire
un principio di conservazione quando applicata ad un sistema di punti. Per il momento limitiamoci a
trattare i sistemi costituiti da un solo punto materiale.
Per quanto abbiamo detto precedentemente un punto materiale è un sistema le cui dimensioni sono
trascurabili rispetto alle altre distanze in gioco. Può accadere, pertanto che un sistema appaia come
un semplice punto materiale quando visto da un osservatore lontano mentre appaia come un insieme
di più punti quando osservato da un osservatore vicino.
E’ ovvio che in tal caso l’osservatore lontano descriverà il moto del sistema come il moto di un
singolo punto materiale mentre l’osservatore vicino sarà in grado esprimere un maggior dettaglio
poichè egli è in grado di descrivere i moti di ognuno dei componenti del sistema. Rimane però aperto
il problema della comunicazione tra i due osservatori. In altre parole occorre capire come i due diversi
osservatori possano comunicarsi le rispettive osservazioni. In particolare occorre capire cosa deve
intendere l’osservatore vicino quando egli sente descrivere, da parte dell’osservatore lontano, il moto
del sistema inteso come un singolo punto, mentre egli lo vede come un insieme di più punti: a quale
punto si riferisce l’osservatore lontano?
Trattiamo allora un sistema di più punti ognuno dei quali abbia una massa m i , occupi la posizione
~ri , si muova con velocità ~vi e sia soggetta alla forza f~i . Per l’osservatore lontano il sistema sarà
~ che si muove di
rappresentato da un singolo punto materiale di massa M , occupante la posizione R,
~ e su cui agisce la forza F~ .
velocità V
49
3.9. LA QUANTITÀ DI MOTO
Per il II principio accade che, per ogni punto, vale:
d (mi~vi )
d~
pi
f~i =
=
dt
dt
per l’osservatore vicino e:
~)
d (M V
dP~
F~ =
=
dt
dt
per l’osservatore lontano.
Per il principio di sovrapposizione degli effetti possiamo notare immediatamente che deve risultare:
Pn
M=
mi
i=1
P
F~ = ni=1 f~i
Sommando su ognuno degli n punti del sistema abbiamo:
n
X
i=1
f~i =
n
X
d (mi~vi )
=
dt
i=1
n
X
d~
pi
i=1
d
=
dt
dt
n
X
i=1
p
~i
!
che va confrontata con l’equivalente relazione scritta dall’osservatore lontano:
dP~
F~ =
dt
Confrontando queste due relazioni possiamo ricavare che:
n
X
dP~
d
= F~ =
f~i =
dt
dt
i=1
per cui in definitiva è:
P~ =
n
X
n
X
p
~i
i=1
!
p~i
i=1
In altre parole possiamo concludere che la quantità di moto vista all’osservatore lontano è pari all
somma delle singole quantità di moto viste dal’osservatore vicino.
Per come sono state definite le quantità di moto abbiamo allora:
~ = P~ =
M V
n
X
p~i =
i=1
n
X
(mi ~vi )
i=1
Ricordando che la velocità è la derivata prima dello spazio si ha:
M
ovvero anche:
d
n
~
X
dR
d~ri
=
(mi
)
dt
dt
i=1
~
M R
dt
=
n
X
d (mi ~ri )
i=1
dt
Dalle regole di derivazione ricaviamo che se due funzioni hanno uguale derivata essi sono uguali a
meno di una costante. Scegliendo allora per i due osservatori lo stesso sistema di riferimento, abbiamo:
~ =
M R
n
X
i=1
(mi ~ri )
50
CAPITOLO 3. I PRINCIPI DELLA DINAMICA
In definitiva possiamo dire che se l’osservatore vicino, cui sono note le posizioni ~r i dei singoli punti
del sistema, determina le coordinate del punto:
~ =
R
Pn
ri )
i=1 (mi ~
P
n
i=1
mi
egli è in grado di determinare la descrizione del moto del sistema visualizzata da un osservatore lontano.
Questo punto viene detto centro di massa E può essere considerato come il punto rappresentati
dell’intero sistema. In altre parole potremo dire che, per certi aspetti, il sistema si comporta come se
tutta la sua massa fosse concentrata nel suo centro di massa. Si invita lo studente a tener conto della
forma della frase. Non si è scritto: nel centro di massa è concentrata tutta la massa ma è come se
nel centro di massa fosse concentrata tutta la massa.
51
3.10. ESERCIZI
3.10
ESERCIZI
Esercizio 3.1 : Determinare quale distanza percorre un’automobile in 8.0 minuti se la sua velocità
media è v = 80 km/h.
Esercizio 3.2 :
Se un corpo percorre 14 km in 12 minuti determinare la sua velocità media.
Esercizio 3.3 : Due treni transitano per una stazione A ad un intervallo di tempo T = 30 min.
Il primo di essi raggiunge la stazione B dopo un tempo t 1 = 4.0 h viaggiando con una velocità
costante v1 = 105 km/h . Quale deve essere la velocità del secondo treno affinché esso giunga in B
contemporaneamente al primo treno?
Esercizio 3.4 :
Un uomo, alto h = 1.60 m, cammina con velocità costante v = 1.1 m/s. Egli
passa sotto un lampione posto ad una altezza H = 6.0 m dal suolo. Determinare la velocità con cui
si sposta l’ombra dell’uomo sul suolo.
Esercizio 3.5 :
media.
Un’auto accelera da 0 a 90 km/h in 5.0 secondi. Determinare la sua accelerazione
Esercizio 3.6 : Un’auto ha un’accelerazione a = 0.50 m/s 2 . Se al tempo t = 0.0 la sua velocità
è vo = 45 km/h, determinare dopo quanto tempo la sua velocità raddoppia, e quanto spazio percorre
durante questo tempo.
Esercizio 3.7 : Un’auto ha un’accelerazione costante a = 3.0 m/s 2 . Sapendo che per t1 = 4.0 s
è x1 = 10 m e per t2 = 6.0 s si ha v2 = 15 m/s, determinare la velocità e la posizione assunte per
t = 10 s.
Esercizio 3.8 : Un corpo viaggia con accelerazione a = 20 − t, partendo da fermo. Determinare
istante per istante la sua velocità e la sua posizione.
Esercizio 3.9 :
La posizione di un corpo varia nel tempo secondo l’equazione x = 0.10 t 3 .
Determinarne la velocità e l’accelerazione.
Esercizio 3.10 :
Una particella si muove con una accelerazione ~a = (0.0, 0.0, 1.6). Se risulta
ro = 0.0 e vo = (3.0, 0.0, 1.0) determinare la velocità e la posizione della particella dopo 8.0 secondi.
Esercizio 3.11 :
Un corpo di massa m = 100 g si muove di moto rettilineo. Nel tempo t esso
percorre una distanza data dall’equazione x = A + B t + 4.0 t 2 + t3 . Determinare la forza agente sul
corpo dopo 5 secondi dall’inizio del moto.
Esercizio 3.12 :
Due forze costanti F~1 ed F~2 , con | F~1 |= 10 N e | F~2 |= 15 N , formano un
o
angolo α = 30 . Esse agiscono contemporaneamente su un corpo di massa m = 2.0 kg. Determinare
il vettore accelerazione ed i vettori velocità e posizione dopo un tempo t = 5.0 s, supponendo che il
52
CAPITOLO 3. I PRINCIPI DELLA DINAMICA
corpo parta da fermo.
Esercizio 3.13 : Su un corpo di massa m = 2.0 kg agiscono due forze perpendicolari tra di loro
con moduli | F~1 |= 20; N ed | F~2 |= 10 N , costanti. Determinare il vettore accelerazione del corpo
nonché i vettori velocità e posizione del corpo dopo un tempo t = 10 s.
Esercizio 3.14 : Un corpo di massa m = 10 kg è sottoposto a due forze, come indicato nella figura.
Determinare la direzione ed il modulo dell’accelerazione nel caso in cui | F~1 |= 10 N , | F~2 |= 20 N ,per
α = 120o e per α = 150o .
Esercizio 3.15 : Un corpo puntiforme di massa m = 2.0 kg si muove sotto l’azione di forze costanti
F~1 = (0.0, 1.0, 1.0) e F~2 = (2.0, 1.0, −1.0). Se all’istante iniziale il corpo parte da fermo dall’origine
del riferimento, si determini la posizione del corpo per t = 30 s.
Esercizio 3.16 :
Trovare l’angolo δ di cui è deflesso un filo a piombo soggetto alla forza peso
e sospeso in un vagone in moto con accelerazione orizzontale a = 3.0 m/s 2 . Si determini anche la
tensione del filo se la massa del corpo è m = 1.0 kg.
Esercizio 3.17 : Un uomo sostiene una massa m = 8.0 kg con una corda il cui carico di rottura è
di 160 N . Quando l’ascensore in cui si trova l’uomo, parte verso l’alto la corda si spezza. Determinare
il valore minimo dell’accelerazione di salita dell’ascensore.
Esercizio 3.18 : Un corpo di massa m = 45 kg è poggiato su una bilancia che si trova all’interno
di un ascensore. Determinare il valore della forza indicata sulla bilancia quando l’ascensore inizia a
scendere con una accelerazione pari a 4.0 m/s 2 .
Esercizio 3.19 : Un corpo di massa m = 6.0 kg si trova all’interno di un ascensore che improvvisamente inizia a scendere con una accelerazione a = 4.0 m/s 2 . Dopo due secondi l’accelerazione si
annulla e dopo altri 10 secondi l’ascensore inizia a fermarsi con una decelerazione pari ad a 1 = 6.0 m/s2 .
Determinare la forza totale applicata sul corpo.
53
3.11. SOLUZIONI
3.11
SOLUZIONI
Svolgimento dell’esercizio 3.1 :
Dal moto rettilineo uniforme ricaviamo che la relazione tra spazio e velocità è s = v t e quindi:
s = 80 km/h × 8 min = 80 × 8/60 = 11 km
Svolgimento dell’esercizio 3.2 :
Invertendo la relazione adoperata nel precedente esercizio, otteniamo
v=
s
14
14 × 60
=
=
= 70 km/h
t
12/60
12
Svolgimento dell’esercizio 3.3 :
Dal testo si deduce che entrambi i treni si muovono di con velocità costante. Per entrambi dovremo
quindi adoperare le formule relative al moto rettilineo uniforme.
Detta s la distanza tra le due stazioni risulta che per il primo treno è s = v 1 t1 mentre per il
secondo è s = v2 t2 ove si deduce dal testo che deve risultare t 2 = t1 − T .
Uguagliando le due formule otteniamo:
v1 t1 = v2 (t1 − T )
per cui abbiamo
v2 =
v1 t1
105 × 4
=
= 120 km/h
t1 − T
4 − 0.5
Svolgimento dell’esercizio 3.4 :
Facciamo riferimento alla FIGURA. Detti A il lampione e B la testa dell’uomo, la sua ombra sarà C.
Dopo un tempo t la testa si sarà spostata in B 1 e l’ombra si troverà in C1 . Dalla similitudine tra i
due triangoli ACC1 e ABB1 risulta che
AC : AB = CC1 : BB1
ma
AC
= H
AB
= H −h
BB1 = v1 t
e, detta v2 la velocità dell’ombra è CC1 = v2 t. In definitiva è:
H : H − h = v 2 t : v1 t
e quindi
v2 =
H v1
= 1.5 m/s
H −h
Svolgimento dell’esercizio 3.5 :
In unità MKS, la velocità finale è:
v=
90
= 25 m/s
3.6
54
CAPITOLO 3. I PRINCIPI DELLA DINAMICA
e quindi l’accelerazione media è
a=
v−0
= 5.0 m/s2
t−0
Svolgimento dell’esercizio 3.6 :
Nel moto uniformemente accelerato le relazioni che legano la velocità con l’accelerazione e lo spazio
con la velocità e l’accelerazione sono rispettivamente:
v = vo + a t
s = s o + vo t +
1
2
a t2
45
dove so è la posizione iniziale mentre vo = 3.6
= 12.5 m/s.
Dalla prima relazione, ponendo v = 2v o , otteniamo:
vo
12.5
=
= 25 m/s
a
0.5
t=
Sostituendo questo valore nella seconda equazione abbiamo:
s=
3 vo2
3 × 12.52
vo2 a vo2
+
=
=
= 470 m
a
2 a2
2a
2 × 0.5
Svolgimento dell’esercizio 3.7 :
In questo caso occorre determinare la posizione e la velocità iniziale in un moto uniformemente
accelerato, regolato dalle equazioni:
= vo + a t
v
x = x o + vo t +
1
2
a t2
Sfruttando i dati del testo abbiamo:
vo
= v2 − a t2 = 15 − 3 × 6 = −3.0 m/s
xo = x 1 − v o t1 −
1
2
a t21 = 10 + 3 × 4 −
1
2
3 × 42 = −2.0 m
Per calcolare la velocità e la posizione richieste si scrive:
v
= vo + a t = −3 + 3 × 10 = 27 m/s
x = x o + vo t +
1
2
a t2 = −2 − 3 × 7 +
1
2
3 × 100 = 130 m
Svolgimento dell’esercizio 3.8 :
Per definizione sappiamo che l’accelerazione è la derivata prima della velocità e quindi questa deve
essere ottenuta come integrale dell’accelerazione nel tempo:
v = vo +
Z
t
a dt =
0
Z
t
0
(20 − t) dt =
Z
t
20 dt −
0
Z
t
0
t dt = 20 t −
1 2
t
2
Per ottenere la posizione dobbiamo ancora integrare la velocità nel tempo:
s = so +
Z
t
v dt =
0
Z
t
0
1
(20 t − t2 ) dt =
2
Z
t
0
20 t dt −
Z
t
0
1 2
t3
t dt = 10 t2 −
2
6
55
3.11. SOLUZIONI
Svolgimento dell’esercizio 3.9 :
Data l’equazione del moto è possibile calcolare la velocità eseguendo la derivata:
v=
dx
d(0.1 t3 )
d(t3 )
=
= 0.1
= 0.1 × 3 t2 = 0.3 t2
dt
dt
dt
mentre l’accelerazione viene ottenuta con un’ulteriore derivata:
a=
dv
d(0.3 t2 )
dt2
=
= 0.3
= 0.3 × 2 t = 0.6 t
dt
dt
dt
Svolgimento dell’esercizio 3.10 :
Il moto della particella è uniformemente accelerato e quindi la velocità è data da ~v = ~v o + ~at , in
termini vettoriali, ovvero in termini di componenti:
~v = (3 + 0 × 8, 0 + 0 × 8, 1 + 1.6 × 8) = (3.0, 0.0, 14)
Per la posizione abbiamo, in termini vettoriali, che:
~r = ~ro + ~vo t +
1
~a t2
2
ovvero, in termini di componenti:
rx = 0 + 3 × 8 +
ry
= 0+0×8+
rz
= 0+1×8+
1
2
1
2
1
2
× 0 × 64 = 24
× 0 × 64 = 0
× 1.6 × 64 = 58
Svolgimento dell’esercizio 3.11 :
Poiché sappiamo che F = ma (scriviamo le grandezze come scalari poiché lo spazio può essere considerato come unidimensionale), risulta che per prima cosa occorre calcolare l’accelerazione ovvero la
derivata seconda dello spazio.
Abbiamo quindi:
d2 x
d2 (A + B t + 4 t2 + t3 )
a= 2 =
= 8+6 t
dt
dt2
e quindi la forza è data da:
F = m a = 8 m + 6 m t = 8 × 0.1 + 6 × 0.1 × 5 = 3.8 N
Svolgimento dell’esercizio 3.12 :
Consideriamo un riferimento xy tale che il corpo, all’istante t = 0, si trovi nell’origine, con la forza F~1
posta sull’asse x e la forza F~2 giacente nel piano xy. Le due forze avranno allora componenti:
F~1 = (F~1 , 0)
F~2 = (F~2 cos α , F~2 sin α)
La forza risultante sarà:
F~ = (F~1 + F~2 cos α , F~2 sin α) = (22, 7.5)
56
CAPITOLO 3. I PRINCIPI DELLA DINAMICA
e l’accelerazione sarà:
~a =
F~
= (11, 3.8)
m
La velocità sarà:
~v = ~a t = (11 × 5, 3.75 × 5) = (55, 19)
mentre la posizione è:
~r =
1
~a t2 = (140, 47).
2
Svolgimento dell’esercizio 3.13 :
Consideriamo un riferimento xy tale che l’asse x coincida con la direzione di F~1 e l’asse y con quella
di F~2 . In tale riferimento le due forze sono rappresentate da:
F~1 = (F~1 , 0)
La loro risultante sarà:
con modulo
F~2 = (0 , F~2 )
F~ = F~1 + F~2 = (F~1 , F~2 ) = (20, 10)
p
√
~
F = 202 + 102 = 500 = 22 N
e formante, con l’asse delle x, un angolo
α = arccos
20
= 27o
22.4
Tutti i tre vettori accelerazione, velocità e posizione formeranno uno stesso angolo con l’asse delle
x. Pertanto ne calcoliamo solo i moduli.
Dal II principio abbiamo:
~
F |~a| =
= 11 m/s2
m
mentre dalle equazioni del moto uniformemente accelerato si ha
|~v| = |~a| t = 11 × 10 = 110 m/s
|~s| =
1
2
|~a| t2 =
1
2
× 11.2 × 100 = 560 m
nell’ipotesi che il corpo parta da fermo, dall’origine del riferimento.
Svolgimento dell’esercizio 3.14 :
Consideriamo un riferimento xy tale che l’asse x sia coincidente con la direzione della forza F~1 . Risulta
allora:
F~1 = (F~1 , 0) = (10 , 0)
con una risultante:
F~2 = (F~2 cos α , F~2 sin α) = (20 cos α , 20 sin α)
F~ = F~1 + F~2 = (F~1 + F~2 cos α , F~2 sin α) = (10 + 20 cos α , 20 sin α)
Nel primo caso è α = 120o e quindi
F~ = (10 + 20 cos 120o , 20 sin 120o ) = (0 , 17)
57
3.11. SOLUZIONI
mentre nel secondo caso è α = 150o e pertanto
F~ = (10 + 20 cos 150o , 20 sin 150o ) = (−7.3 , 10)
L’accelerazione si determina sfruttando il secondo principio e si ottiene:
1. Nel caso in cui sia α = 120o :
|~a| =
|F~|
m
= 1.7
θ = 90o
2. Nel caso in cui sia α = 150o :
|~a| =
|F~|
m
= 1.2
θ = 126o
dove in entrambi i casi θ è l’angolo che l’accelerazione forma con l’asse x.
Svolgimento dell’esercizio 3.15 :
La forza totale agente sul corpo è:
F~ = F~1 + F~2 = (2 , 2 , 0)
per cui l’accelerazione è:
F~
= (1 , 1 , 0)
m
Per i dati del testo è ~so = 0 e ~vo = 0 e quindi, dalla equazione oraria del moto uniformemente
accelerato, otteniamo:
1
1
~s = ~a t2 = ~a 302 = 450 ~a = (450 , 450 , 0)
2
2
~a =
Svolgimento dell’esercizio 3.16 :
Osservando il fenomeno da un sistema di riferimento inerziale (ad esempio un osservatore fermo al
suolo) abbiamo che le forze applicate sul corpo sono la forza peso data da P~ = m~g , ove ~g è detta
accelerazione di gravità ed è diretta verticalmente verso il basso con modulo g ≈ 10 m/s 2 , e la tensione
della fune T~ , diretta lungo la direzione della fune. Applicando il secondo principio della dinamica
abbiamo:
m ~a = m ~g − T~
per cui è
In modulo sarà allora
T~ = m (~a + ~g )
| T~ |=
q
a2 + g 2 = 10 N
mentre l’inclinazione di T~ rispetto alla verticale sarà:
δ = arctan
ma
a
= arctan = 17o
mg
g
Svolgimento dell’esercizio 3.17 :
Dal punto di vista di un sistema di riferimento inerziale il secondo principio si scrive:
ma=mg+T
58
CAPITOLO 3. I PRINCIPI DELLA DINAMICA
ove a è l’accelerazione dell’ascensore, g è l’accelerazione di gravità e T è la tensione della corda.
L’equazione è stata scritta con gli scalari perché ci si può restringere alla sola direzione verticale (le
grandezze sono positive se dirette verso il basso). Risulta allora:
a = g + T /m = 10 − 160/8 = −10 m/s2
Poiché l’accelerazione risulti negativa essa è di salita.
Svolgimento dell’esercizio 3.18 :
Il corpo è sottoposto alla forza peso ma, rispetto all’ascensore, anche alla forza d’inerzia. Poiché tale
forza è dovuta all’accelerazione ed ha segno opposto a questo ne consegue che la forza d’inerzia è
diretta in verso opposto alla forza peso. La forza risultante sarà allora:
F = m g − m a = m (g − a) = 45 × 6 = 270 N .
Svolgimento dell’esercizio 3.19 :
Sul corpo agisce, oltre alla forza peso, anche la forza di inerzia e quindi, per i primi due secondi,
avremo:
F1 = m g − m a = 6 × 6 = 36 N
Per i successivi dieci secondi agisce solo la forza peso e quindi si ha:
F2 = m g = 6 × 10 = 60 N
Infine durante la fermata avremo:
F3 = m g + m a = 6 × 16 = 96 N
Si noti che in tutti i casi si è indicata direttamente la componente verticale (diretta verso il basso)
della forza poiché essa è l’unica esistente.