CINEMATICA DEL MOTO ROTATORIO
DI UNA PARTICELLA
MOTO CIRCOLARE: VELOCITA’ ANGOLARE ED
ACCELERAZIONE ANGOLARE
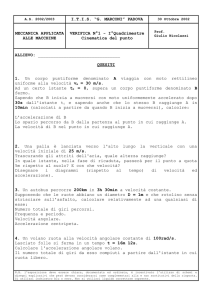
Si consideri una particella P in
moto circolare che descrive un
arco di circonferenza s. L’angolo
di rotazione rispetto ad un asse di
riferimento vale:
φ =
s
r
con r raggio della circonferenza.
L’angolo φ si misura in radianti.
Si definisce (v. figura) velocità angolare media di P la grandezza:
ω =
φ 2 − φ1
t 2 − t1
=
∆φ
∆t
mentre la velocità angolare istantanea di P è definita come:
ω = lim ∆t →0
∆φ
dφ
=
∆t
dt
[ω ] = [ω ] = [T −1 ]
⇒ unità di misura: rad/s (giri/s)
Si definisce accelerazione angolare media di P la grandezza:
α =
ω2 − ω1
t2 − t1
=
∆ω
∆t
mentre l’accelerazione angolare istantanea di P è:
α = lim ∆t →0
∆ω
dω
=
∆t
dt
[α ] = [α ] = [T −2 ]
⇒ unità di misura: rad/s2 (giri/s2)
Velocità angolare ed accelerazione angolare (medie ed istantanee)
sono grandezze vettoriali la cui direzione è perpendicolare al
piano della circonferenza ed il verso è entrante se il moto avviene
in senso orario, uscente se il moto avviene in senso antiorario
(regola della mano destra).
Nel caso della figura precedente:
dφ
zˆ
dt
dω
zˆ
dt
ω =
α =
MOTO CIRCOLARE: RELAZIONI SCALARI TRA VARIABILI
LINEARI E VARIABILI ANGOLARI
Per le definizioni di angolo descritto da P e di velocità
angolare si ha:
φ =
s
r
⇔
s =φr
⇔
ds
dφ
=
r = ωr
dt
dt
Essendo:
vT =
ds
dt
si ha:
vT = ω r .
Derivando nuovamente si ricava:
dvT
dω
r = αr
=
dt
dt
Ma:
aT =
dvT
dt
da cui:
aT = α r .
Quest’ultima si aggiunge alla già nota espressione
dell’accelerazione centripeta (radiale):
vT2
aR =
r
che ora può essere riscritta come:
aR = ω 2 r
MOTO CIRCOLARE: RELAZIONI VETTORIALI TRA
VARIABILI LINEARI E VARIABILI ANGOLARI
I vettori velocità (lineare) v e velocità angolare ω sono legati dalla
relazione:
v = ω×r
(1)
dove r è il vettore posizione di P.
La precedente si prova ricordando le relazioni scalari del
paragrafo precedente unitamente alla definizione di prodotto
vettoriale.
Per definizione di accelerazione e per quanto sopra discusso:
dv
d
dω dr
(ω × r ) =
a =
=
×r +ω ×
= α ×r +ω ×v
dt
dt
dt
dt
In definitiva:
a = α ×r +ω×v
(2)
Per definizione di prodotto vettoriale:
aT = α × r
aR = ω × v
quindi:
a = aT + aR
(3)
N.B.: La (1) e la (2) valgono non solo se l’origine è nel centro
della circonferenza ma anche se è posizionata come in figura.
MOTO CURVILINEO: COMPONENTI TANGENZIALE E
CENTRIPETA DELL’ACCELERAZIONE
La (3) vale anche per un generico moto curvilineo per il quale si
dimostra che:
dvT
vT2
a = aT + aR =
uˆT −
uˆ R
ρ
dt
con ρ raggio di curvatura della traiettoria ed i due versori a terzo
membro pari rispettivamente al versore tangente ed al versore
radiale; evidentemente:
uˆ R = rˆ .
Casi particolari notevoli:
a) moto rettilineo accelerato (ρ → ∞)
dv
a = aT = T uˆT
dt
L’accelerazione ha direzione costante (la stessa del moto) e verso
uguale oppure opposto a quest’ultimo, a seconda che il moto sia
accelerato o decelerato.
b) moto circolare uniforme (ρ = r)
vT2
a = aR = −
uˆ R
r
L’accelerazione è tutta e sola quella centripeta.
DINAMICA DEL MOTO ROTATORIO DI
UNA PARTICELLA
MOMENTO ANGOLARE
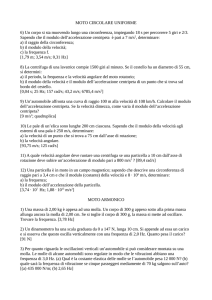
Si definisce momento angolare
(o momento della quantità di
moto) di una particella P
rispetto al punto O (polo), il
vettore:
l = r × p = m (r × v )
con m massa e p quantità di
moto di P (v. figura accanto).
Il modulo di l vale:
l = r p sin θ = m r v sin θ
direzione e verso come in figura (scaturiscono dalla definizione di
prodotto vettoriale − regola della mano destra).
Si noti che è indispensabile fissare il polo rispetto a cui calcolare il
momento (altrimenti la grandezza è indefinita!)
MOMENTO MECCANICO DI UNA FORZA
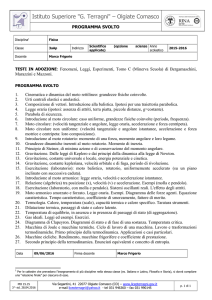
Si definisce momento meccanico
(o momento torcente) di una forza
F, agente su una particella P,
rispetto al punto O (polo), il
vettore:
τ = r×F
(v. figura accanto).
Il suo modulo vale:
τ = r F sin θ
direzione e verso come in figura (scaturiscono dalla definizione di
prodotto vettoriale − regola della mano destra).
Anche in questo caso è indispensabile fissare il polo rispetto a cui
calcolare il momento (altrimenti la grandezza è indefinita!).
Così come per ricavare l’accelerazione (lineare) di una particella
serve la forza ad essa applicata, così per ricavare l’accelerazione
angolare serve il momento meccanico.
Al contrario della accelerazione (lineare), che dipende solo dalla
forza, l’accelerazione angolare dipende non solo dalla forza ma
anche dal punto d’applicazione della forza stessa.
TEOREMA DEL MOMENTO ANGOLARE
Determiniamo la relazione che lega momento angolare e momento
meccanico (rispetto allo stesso polo).
dl
d
dr dp
=
(r × p) =
×p+r×
= v × p + r × (∑ F )
dt
dt
dt
dt
dove si è considerato che, per la seconda legge di Newton:
dp
∑ F = m a = dt
Quindi:
dl
= r × (∑ F )
dt
In definitiva, per la definizione di momento meccanico (v. sopra):
dl
∑τ = dt
Relazione tra momento angolare e momento meccanico (teorema
del momento angolare) analoga alla seconda legge di Newton.
Per una particella libera (ossia in moto rettilineo uniforme), F = 0
e di conseguenza τ = 0; quindi si conserva sia la quantità di moto
che il momento angolare.