Approfondimenti
Integrale di Riemann
Per integrale multiplo si intende l’integrale di una funzione reale di n ≥ 2 variabili. La
nozione di integrale multiplo è una naturale estensione di quella dell’integrale definito di
una funzione reale di una variabile reale. Nel corso di Analisi Matematica I avete studiato la teoria dell’integrazione secondo Riemann nella quale viene introdotto l’integrale
di una funzione limitata su un intervallo limitato. Nel caso di funzioni di più variabili,
l’estensione naturale di questa situazione è quella di considerare funzioni limitate su iperrettangoli, ossia su insiemi che sono l’estensione dei rettangoli nel piano e dei parallelepipedi nello spazio. Mentre in una variabile si calcola l’integrale di una funzione limitata
prevalentemente su un intervallo limitato, nel caso di funzioni di più variabili si calcola
l’integrale di una funzione limitata su un sottoinsieme limitato di Rn che può essere
molto vario e che non è necessariamente un iperrettangolo. La teoria dell’integrazione
deve quindi poter discriminare fra gli insiemi “buoni” su cui integrare e quelli “non
buoni”. È quindi fondamentale possedere una teoria della misura, che introduca e studi
le proprietà degli insiemi misurabili (quelli “buoni”) che, sostanzialmente, sono quelli a
cui è possibile associare una misura, che nel piano comunemente chiamiamo area e nello
spazio volume. Per questo motivo risulta più laborioso introdurre il concetto di integrale
multiplo per una funzione limitata.
Procediamo nel seguente modo:
a) introduciamo l’integrale di funzioni limitate su iperrettangoli imitando il procedimento visto nel caso dell’integrale di Riemann per funzioni di una variabile;
b) introduciamo poi il concetto di misura di Peano-Jordan di un sottonsieme di Rn e
quindi quello di insieme misurabile;
c) introduciamo infine l’integrale di funzioni limitate su un insieme misurabile;
1
2
S. Lancelotti, Lezioni di Analisi Matematica II
d) infine dimostriamo i principali metodi di calcolo degli integrali di funzioni di due
e tre variabili.
Nel seguito considereremo n ∈ N, n ≥ 1.
1
Integrale di Riemann su un iperrettangolo
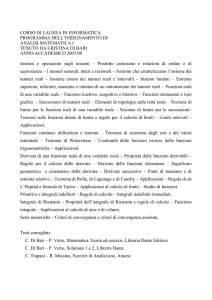
(1.1) Definizione
Siano I1 , . . . , In ⊆ R intervalli limitati. Si chiama iperret-
n
tangolo in R l’insieme R = I1 × · · · × In .
Per n = 1 si ha l’intervallo R = I1 .
Per n = 2 si ha il rettangolo R = I1 × I2 .
Per n = 3 si ha il parallelepipedo (retto o rettangolo) R = I1 × I2 × I3 .
y
z
R
R
O
x
Fig. 1.1: Iperrettangolo nel piano R2 .
y
x
Fig. 1.2: Iperrettangolo nello spazio R3 .
Gli estremi degli intervalli Ij possono essere o non essere inclusi nell’intervallo.
Come vedremo, analogamente a quanto accade per l’integrale in una variabile, ciò non
ha alcuna importanza nella teoria dell’integrazione.
Osserviamo che se R è un iperrettangolo in Rn , allora ∂R è unione di un numero
finito di iperrettangoli in Rm con m ≤ n − 1.
(1.2) Definizione
Per ogni j = 1, . . . , n sia Ij un intervallo limitato di estremi
aj , bj con aj < bj e R = I1 × · · · × In un iperrettangolo in Rn .
Si chiama misura (n-dimensionale) di R il numero reale
m(R) = (b1 − a1 )(b2 − a2 ) · · · (bn − an ).
3
Appendice Integrale di Riemann su un iperrettangolo
Evidentemente la misura di un iperrettangolo è data dal prodotto delle misure dei
singoli intervalli il cui prodotto (cartesiano) è l’iperrettangolo stesso.
Per n = 1, essendo R = I1 , la sua misura è la lunghezza dell’intervallo I1 , cioè
m(R) = b1 − a1 .
Per n = 2, essendo R = I1 × I2 , la sua misura è l’area del rettangolo R, cioè
m(R) = (b1 − a1 )(b2 − a2 ).
Per n = 3, essendo R = I1 × I2 × I3 , la sua misura è il volume del parallelepipedo
R, cioè m(R) = (b1 − a1 )(b2 − a2 )(b3 − a3 ).
(1.3) Definizione
Sia R un iperrettangolo in Rn .
Si chiama suddivisione di R una famiglia finita {R1 , . . . , Rk } di iperrettangoli
contenuti in R tali che:
1) R = R1 ∪ · · · ∪ Rk ;
2) per ogni i, j = 1, . . . , k con i 6= j l’intersezione Ri ∩ Rj contiene al più punti
della frontiera di Ri e Rj .
y
R = R1 ∪ · · · ∪ Rk
R1
R2
Rk
O
x
Fig. 1.3: Suddivisione di un iperrettangolo nel piano R2 .
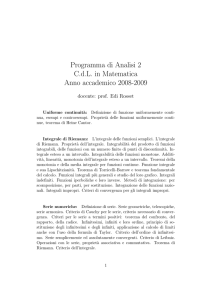
(1.4) Definizione
Siano R un iperrettangolo in Rn e f : R → R una funzione.
Diciamo che f è una funzione a scala se esiste una suddivisione {R1 , . . . , Rk } di
R tale che f è costante su ciascuno degli iperrettangoli Rj , per j = 1, . . . , k. In tal
caso diciamo che la suddivisione è adattata a f .
4
S. Lancelotti, Lezioni di Analisi Matematica II
z
z
f
f
y
y
R
R
x
x
Fig. 1.4: Suddivisione adattata alla funzione a scala.
Fig. 1.5: Suddivisione non adattata alla
funzione a scala.
Introduciamo ora il concetto di integrale di una funzione a scala su un iperrettangolo.
Il significato geometrico è analogo a quello in una variabile. Infatti, se consideriamo in
Rn+1 il trapezoide di f ,
n
Tf = (x, xn+1 ) ∈ Rn+1 : x ∈ R ⊆ Rn ,
o
0 ≤ xn+1 ≤ f (x) oppure f (x) ≤ xn+1 ≤ 0 ,
cioè la regione delimitata dal grafico di f , dall’iperrettangolo R e dagli iperpiani1 ortogonali a Rn (su cui “giace” R) passanti per ∂R, allora l’integrale di f su R è il “volume”
in Rn+1 di questo trapezoide, dove le virgolette stanno ad indicare che le zone di questa
regione che corrispondono ai valori positivi di f danno un contributo positivo, mentre
quelle che corrispondono ai valori negativi di f danno un contributo negativo.
z
Tf
y
R
x
Fig. 1.6: Le regioni del trapezoide Tf di f che corrispondono ai valori positivi di f
danno un contributo positivo, mentre quelle che corrispondono ai valori negativi di f
danno un contributo negativo.
1
Un iperpiano è una generalizzazione in
Rn
della nozione di piano dello spazio
R3 .
5
Appendice Integrale di Riemann su un iperrettangolo
Evidentemente se f ≥ 0, allora si ha effettivamente il volume in Rn+1 di questo
trapezoide.
Siano R un iperrettangolo in Rn , f : R → R una funzione a
(1.5) Definizione
scala e {R1 , . . . , Rk } una suddivisione di R adattata a f . Per ogni j = 1, . . . , k sia
cj il valore assunto da f su Rj .
Si chiama integrale (multiplo) di f su R il numero reale
Z
R
f (x) dx = c1 m(R1 ) + · · · + ck m(Rk ) =
k
X
cj m(Rj ).
j=1
Talvolta l’integrale di f su R si denota con uno dei seguenti simboli:
Z
Z
f,
R
R
n volte
f (x1 , . . . , xn ) dx1 · · · dxn ,
zZ }| Z {
···
R
f (x1 , . . . , xn ) dx1 · · · dxn .
Se n = 2 si usa talvolta scrivere
ZZ
f (x, y) dx dy.
(Integrale doppio)
R
Se n = 3 si usa talvolta scrivere
ZZZ
f (x, y, z) dx dy dz.
(Integrale triplo)
R
Si dimostra facilmente che questa definizione è ben posta, ossia non dipende dalla
scelta della suddivisione di R adattata a f .
Introduciamo ora l’integrale di una funzione limitata, non necessariamente a scala, su un
iperettangolo R. Siano quindi R un iperrettangolo in Rn e f : R → R una funzione limitata. Denotiamo con Hf− e Hf+ gli insiemi delle funzioni a scala minoranti e maggioranti
di f rispettivamente, cioè
Hf− = {g : R → R a scala tale che g ≤ f } ,
Hf+ = {g : R → R a scala tale che g ≥ f } .
Essendo f limitata su R si ha che Hf− , Hf+ 6= ∅. Poniamo
Z
f = sup
R
Z
f = inf
R
Z
g: g∈
R
Z
R
g: g∈
Hf−
Hf+
(Integrale inferiore di f su R),
(Integrale superiore di f su R).
6
S. Lancelotti, Lezioni di Analisi Matematica II
Essendo f limitata su R si ha che
Z
f,
R
Z
f ∈ R e evidentemente
R
Z
f≤
R
Z
f.
R
R
h
f
Rn
R
g
Fig. 1.7: Approssimazione di f con le funzioni a scala g e h, g ≤ f ≤ h.
(1.6) Definizione
Siano R un iperrettangolo in Rn e f : R → R una funzione
limitata.
Diciamo che f è integrabile (secondo Riemann) su R se
Z
R
f=
Z
f ∈ R. In
R
tal caso chiamiamo integrale (multiplo) di Riemann di f su R il comune valore
di questi due integrali e lo denotiamo con le notazioni introdotte precedentemente.
Si dimostra che se f è continua e limitata su R, allora è integrabile. Esistono anche
funzioni non integrabili. Ad esempio, posto R = [0, 1] × [0, 1], la funzione f : R → R
7
Appendice Misura di Peano-Jordan
definita da
f (x, y) =
(
1 se x ∈ Q, y ∈ R
0 se x 6∈ Q, y ∈ R
non è integrabile su R. Infatti, se g, h : R → R sono due funzioni a scala rispettivamente
minorante e maggiorante di f , allora essendo f (x, y) = 0 per ogni (x, y) ∈ R con x 6∈ Q,
si ha che g(x, y) ≤ 0 per ogni (x, y) ∈ R. Analogamente, essendo f (x, y) = 1 per ogni
(x, y) ∈ R con x ∈ Q, si ha che h(x, y) ≥ 1 per ogni (x, y) ∈ R. Quindi
Z
g(x, y) dx dy ≤ 0,
R
Z
h(x, y) dx dy ≥ 1.
R
Ne segue che
Z
f ≤ 0,
R
Quindi
2
Z
f<
R
Z
Z
f ≥ 1.
R
f ∈ R da cui segue che f non è integrabile su R.
R
Misura di Peano-Jordan
(2.1) Definizione
Sia P ⊆ Rn . Diciamo che P è un plurirettangolo se
P è l’unione di un numero finito di iperrettangoli R1 , . . . , Rk tali che per ogni
i, j = 1, . . . , k con i 6= j l’intersezione Ri ∩ Rj contiene al più punti della frontiera
di Ri e Rj .
La misura n-dimensionale del plurirettangolo P = R1 ∪ · · · ∪ Rk è data da
m(P ) = m(R1 ) + · · · + m(Rk ) =
k
X
m(Rj ).
j=1
Evidentemente un iperrettangolo è un plurirettangolo.
8
S. Lancelotti, Lezioni di Analisi Matematica II
y
y
P = R1 ∪ R2
P = R1 ∪ R2
R1
R1
R2
R2
O
x
Fig. 2.1: P è un plurirettangolo.
(2.2) Definizione
O
x
Fig. 2.2: P non è un plurirettangolo.
Sia Ω ⊆ Rn limitato non vuoto. Introduciamo i seguenti
insiemi:
S − (Ω) = {P ⊆ Rn plurirettangolo tale che P ⊆ Ω},
S + (Ω) = {P ⊆ Rn plurirettangolo tale che P ⊇ Ω}.
Evidentemente S + (Ω) 6= ∅, mentre S − (Ω) potrebbe anche essere l’insieme vuoto
(per esempio se Ω è l’insieme costituito da un solo punto).
Si chiama misura interna di Ω il numero reale
m∗ (Ω) = sup{m(P ) : P ∈ S − (Ω)}
e si chiama misura esterna di Ω il numero reale
m∗ (Ω) = inf{m(P ) : P ∈ S + (Ω)},
con la convenzione che se S − (Ω) = ∅, allora m∗ (Ω) = 0.
Evidentemente 0 ≤ m∗ (Ω) ≤ m∗ (Ω).
Da un punto di vista pratico, stiamo approssimando dall’interno e dall’esterno
l’insieme Ω con dei plurirettangoli, cioè con l’unione di iperrettangoli. Calcoliamo la
misura di questi plurirettangoli e facciamo il sup delle misure di quelli interni, quelli
appartenenti a S − (Ω), e l’inf delle misure di quelli esterni, quelli appartenenti a S + (Ω).
9
Appendice Misura di Peano-Jordan
y
P
Ω
Q
Q⊆Ω⊆P
Q ∈ S − (Ω)
P ∈ S + (Ω)
O
x
Fig. 2.3: Approssimazione di Ω ⊆ R2 dall’interno e dall’esterno con plurirettangoli.
(2.3) Definizione
Sia Ω ⊆ Rn limitato non vuoto.
Diciamo che Ω è misurabile (secondo Peano-Jordan) se m∗ (Ω) = m∗ (Ω) e in
tal caso chiamiamo misura di Ω il comune valore e lo denotiamo con mn (Ω), o
più semplicemente, dove non vi sia ambiguità, con m(Ω).
Per convenzione poniamo m(∅) = 0.
Equivalentemente, Ω è misurabile se per ogni ε > 0 esistono due plurirettangoli
P1 ∈ S + (Ω) e P2 ∈ S − (Ω) tali che m(P2 \ P1 ) = m(P2 ) − m(P1 ) < ε.
Evidentemente se Ω = P plurirettangolo, allora riotteniamo la nozione precedente.
Se Ω ⊆ R2 è misurabile, la misura di Ω è l’area di Ω.
Se Ω ⊆ R3 è misurabile, la misura di Ω è il volume di Ω.
In generale per n ≥ 3 la misura di Ω è detta volume (n-dimensionale) di Ω.
(2.4) Esempio Un esempio di insieme non misurabile nel piano è
Ω = {(x, y) ∈ [0, 1] × [0, 1] : x, y ∈ Q} .
Infatti, in tal caso S − (Ω) = ∅ e quindi m∗ (Ω) = 0, mentre m∗ (Ω) = 1. Ne segue che
m∗ (Ω) < m∗ (Ω) e quindi Ω non è misurabile.
10
S. Lancelotti, Lezioni di Analisi Matematica II
(2.5) Definizione
Sia Ω ⊆ Rn misurabile.
Diciamo che Ω è trascurabile se m(Ω) = 0.
Sia Ω ⊆ Rn limitato non vuoto.
(2.6) Teorema
Allora Ω è misurabile se e solo se ∂Ω è trascurabile.
Dimostrazione. Sia Ω misurabile. Dalla definizione segue che per ogni ε > 0 esistono
due plurirettangoli P1 , P2 , con P1 ⊆ Ω ⊆ P2 , tali che m(P2 ) − m(P1 ) < ε. Senza perdita
di generalità possiamo supporre che P1 sia aperto e P2 sia chiuso (infatti, se cosı̀ non
fosse potremmo sostituire a P1 la sua parte interna e a P2 la sua chiusura, che hanno
chiaramente la stessa misura di P1 e P2 rispettivamente). Essendo P1 ⊆ Ω, si ha che
P1 ⊆ int(Ω). Analogamente, essendo Ω ⊆ P2 , si ha che Ω ⊆ P2 . Quindi ∂Ω ⊆ P2 \ P1 .
Essendo P2 \ P1 un plurirettangolo, si ha che
m(P2 \ P1 ) = m(P2 ) − m(P1 ) < ε.
Quindi
m(∂Ω) ≤ m(P2 \ P1 ) < ε
e per l’arbitrarietà di ε si ha che m(∂Ω) = 0.
Viceversa supponiamo che m(∂Ω) = 0. Siano P e Q due plurirettangoli tali che
∂Ω ⊆ Q ⊆ P e Ω ⊆ P con m(Q) < ε. Evidentemente P \Q è un plurirettangolo con ∂Ω∩
(P \ Q) = ∅. Conformemente alla definizione di plurirettangolo (vedi Definizione (2.1))
siano R1 , · · · , Rm iperrettangoli tali che P \ Q = R1 ∪ · · · ∪ Rm e tali che per ogni
i, j = 1, . . . , m con i 6= j l’intersezione Ri ∩ Rj contenga al più punti della frontiera di
Ri e Rj . Evidentemente per ogni i = 1, . . . , m si ha che ∂Ω ∩ Ri = ∅. Quindi per ogni
i = 1 · · · , m l’iperrettangolo Ri o è contenuto in Ω oppure è contenuto in CΩ. A patto
di rinominarli, siano R1 , · · · , Rk gli iperrettangoli contenuti in Ω (e quindi Rk+1 , · · · , Rm
non intersecano Ω). Siano P1 = R1 , ∪ · · · ∪ Rk e P2 = Q ∪ P1 . Evidentemente P1 ⊆ Ω ed
essendo
h
i
P = (P \ Q) ∪ Q = (R1 , ∪ · · · ∪ Rk ) ∪ Q ∪ (Rk+1 ∪ · · · ∪ Rm ) = P2 ∪ (Rk+1 ∪ · · · ∪ Rm ),
Ω ⊆ P e Ω ∩ (Rk+1 ∪ · · · ∪ Rm ) = ∅, si ha che Ω ⊆ P2 . Quindi P1 ∈ S − (Ω) e P2 ∈ S + (Ω)
e si ha che
m(P2 ) − m(P1 ) = m(Q) < ε.
11
3. Integrale di Riemann su un insieme misurabile
Ne segue che Ω è misurabile.
3
Integrale di Riemann su un insieme misurabile
Nella sezione 1 abbiamo introdotto l’integrale di Riemann di una funzione limitata su
un iperrettangolo. Per poter estendere questo concetto al caso di una funzione limitata
su un insieme misurabile, ci riconduciamo al caso precedente estendendo la funzione ad
un iperrettangolo che contiene l’insieme misurabile con valore nullo al di fuori di questo
insieme.
(3.1) Definizione
Siano Ω ⊆ Rn misurabile e f : Ω → R una funzione limitata.
Siano R un iperrettangolo tale che Ω ⊆ R e fe : R → R la funzione
fe(x) =
f (x)
0
se x ∈ Ω
se x ∈ R \ Ω.
Diciamo che f è integrabile (secondo Riemann) su Ω se fe è integrabile su R
nel senso della Definizione (1.6) e in tal caso poniamo
Z
Ω
f=
Z
R
fe,
lo chiamiamo integrale (multiplo) di Riemann di f su Ω e lo denotiamo con
le medesime notazioni introdotte precedentemente.
Si osserva che le nozioni di funzione integrabile e di integrale su un insieme misurabile
non dipendono dalla scelta dell’iperrettangolo R.
Evidentemente se Ω è un iperrettangolo, allora si riottiene la nozione introdotta
dalla Definizione (1.6). Infatti, in tal caso si ha che fe = f .Z
Se f ≥ 0, allora come nel caso precedente si ha che
trapezoide di f ,
n
f è il volume in Rn+1 del
Ω
Tf = (x1 , · · · , xn , xn+1 ) ∈ Rn+1 : x = (x1 , · · · , xn ) ∈ Ω,
Si osserva infine che se f = 1 su Ω, allora
Z
o
0 ≤ xn+1 ≤ f (x) .
f = m(Ω).
Ω
Si dimostra che se f : Ω → R è continua e limitata, allora f è integrabile.
Concludiamo questa sezione elencando alcune delle proprietà principali dell’integrale
multipo, utili anche nelle applicazioni.
12
S. Lancelotti, Lezioni di Analisi Matematica II
(3.2) Proposizione
Siano Ω ⊆ Rn misurabile, f, g : Ω → R integrabili su Ω e
λ ∈ R. Allora valgono i seguenti fatti:
a) f + g è integrabile su Ω e si ha che
Z
(f + g) =
Ω
Z
f+
Ω
Z
g;
Ω
b) λf è integrabile su Ω e si ha che
Z
Z
λf = λ
Ω
c) se f ≤ g su Ω, allora
Z
f≤
Ω
Z
f;
Ω
g;
Ω
d) |f | è integrabile su Ω e si ha che
Z
Z
f ≤
|f |.
Ω
(3.3) Proposizione
Ω
Siano Ω ⊆ Rn misurabile e f : Ω → R integrabile su Ω.
Allora valgono i seguenti fatti:
a) se Ω è trascurabile, allora
Z
f = 0;
Ω
b) se Ω = A ∪ B con A e B misurabili e A ∩ B trascurabile, allora
Z
Ω
f=
Z
Z
f=
A∪B
f+
A
Z
f;
B
c) se A ⊆ Ω è misurabile, allora f è integrabile anche su A;
d) se A ⊆ Ω è misurabile e f ≥ 0 su Ω, allora
Z
f≤
A
Z
Ω
f.
13
4. Calcolo degli integrali multipli
4
Calcolo degli integrali multipli
4.1
Calcolo degli integrali doppi
(4.1) Definizione
Sia Ω ⊆ R2 .
Diciamo che Ω è un insieme y-semplice (o verticalmente convesso) se è della
forma
n
o
Ω = (x, y) ∈ R2 : a ≤ x ≤ b, α(x) ≤ y ≤ β(x) ,
dove α, β : [a, b] → R sono due funzioni continue tali che α(x) ≤ β(x) per ogni
x ∈ [a, b].
Diciamo che Ω è un insieme x-semplice (o orizzontalmente convesso) se è
della forma
n
o
Ω = (x, y) ∈ R2 : c ≤ y ≤ d, γ(y) ≤ x ≤ δ(y) ,
dove γ, δ : [c, d] → R sono due funzioni continue tali che γ(y) ≤ δ(y) per ogni
y ∈ [c, d].
Osserviamo che questi insiemi sono misurabili. Infatti, i loro bordi hanno misura
(area) nulla e quindi per il Teorema (2.6) sono misurabili.
y
y
d
Ω
y = α(x)
O
a
Ω
x = δ(y)
x = γ(y)
y = β(x)
c
b
x
Fig. 4.1: Insieme y-semplice.
O
x
Fig. 4.2: Insieme x-semplice.
14
S. Lancelotti, Lezioni di Analisi Matematica II
(4.2) Teorema
(di integrazione su insiemi x-semplici o y-semplici) Siano
2
Ω ⊆ R l’insieme y-semplice
n
o
Ω = (x, y) ∈ R2 : a ≤ x ≤ b, α(x) ≤ y ≤ β(x) ,
dove α, β : [a, b] → R sono funzioni continue tali che α(x) ≤ β(x) per ogni x ∈ [a, b],
e f : Ω → R una funzione continua2 . Allora si ha che
Z
f (x, y) dx dy =
Ω
Z
b
a
"Z
#
β(x)
f (x, y) dy dx.
α(x)
Se Ω ⊆ R2 è l’insieme x-semplice
n
o
Ω = (x, y) ∈ R2 : c ≤ y ≤ d, γ(y) ≤ x ≤ δ(y) ,
dove γ, δ : [c, d] → R sono funzioni continue tali che γ(y) ≤ δ(y) per ogni y ∈ [c, d],
e f : Ω → R è una funzione continua2 , allora si ha che
Z
f (x, y) dx dy =
Ω
Z
d
c
"Z
#
δ(y)
f (x, y) dx dy.
γ(y)
Dimostrazione. Dimostriamo la formula per gli insiemi y-semplici (in modo analogo
si procede per gli insiemi x-semplici). Sia R = [a, b] × J un rettangolo contenente Ω e
sia fe : R → R la funzione
fe(x) =
(
f (x) se x ∈ Ω
se x ∈ R \ Ω.
0
Siano g, h : R → R due funzioni a scala tali che g ≤ fe ≤ h. Per ogni x ∈ [a, b] poniamo
G(x) =
Z
g(x, y) dy,
H(x) =
J
Z
h(x, y) dy.
J
Le funzioni G e H sono evidentemente a scala su [a, b] e per ogni x ∈ [a, b] si ha che
Z
g(x, y) dy ≤
J
Z
J
fe(x, y) dy ≤
Z
h(x, y) dy
J
che, essendo f (x, y) = fe(x, y) = 0 se y 6∈ [α(x), β(x)], equivale a
G(x) ≤
Z
β(x)
f (x, y) dy ≤ H(x).
α(x)
2
Per il Teorema di Weierstrass risulta che Ω è compatto e che f è limitata.
15
4.2 Calcolo degli integrali tripli
Per la proprietà c) della Proposizione (3.3) si ha che
Z
b
G(x) dx ≤
a
Z
b
a
"Z
#
β(x)
f (x, y) dy dx ≤
α(x)
Z
b
H(x) dx.
a
Poiché
Z
g(x, y) dx dy =
R
Z
Z
b
G(x) dx,
a
h(x, y) dx dy =
R
Z
b
H(x) dx,
a
si ha che
Z
g(x, y) dx dy ≤
R
Z
b
a
"Z
#
β(x)
f (x, y) dy dx ≤
α(x)
Z
h(x, y) dx dy.
R
Essendo f integrabile, si ha che
Z
f (x, y) dx dy =
Ω
da cui segue che
Z
f (x, y) dx dy =
Ω
4.2
Z
R
Z
b
a
"Z
fe =
β(x)
α(x)
Z
R
fe
#
f (x, y) dy dx.
Calcolo degli integrali tripli
Per gli integrali tripli esistono formule di riduzione simili a quelle degli integrali doppi.
L’idea di fondo è di ricondurre il calcolo di un integrale triplo a quello in cascata di un
integrale doppio e uno definito in una variabile. A seconda che si calcoli prima l’integrale
in una variabile o quello doppio, si hanno le formule di integrazione per fili paralleli ad
un asse o per strati paralleli ad un piano.
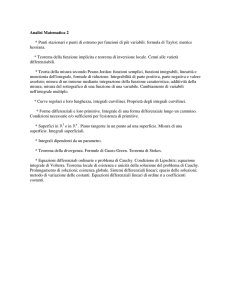
Integrazione per fili paralleli ad un asse
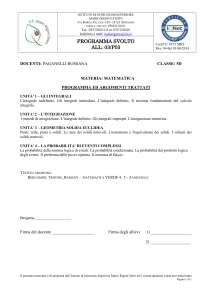
Asse z. Sia Ω ⊆ R3 l’insieme
n
o
Ω = (x, y, z) ∈ R3 : (x, y) ∈ D, α(x, y) ≤ z ≤ β(x, y) ,
dove D ⊆ R2 è compatto (chiuso e limitato) e α, β : D → R sono due funzioni
continue tali che α(x, y) ≤ β(x, y) per ogni (x, y) ∈ D, e sia f : Ω → R una
funzione continua3 .
3
Per il Teorema di Weierstrass risulta che Ω è compatto e che f è limitata. Inoltre, si osserva che Ω
è misurabile. Infatti, il suo bordo ha misura (volume) nullo e quindi per il Teorema (2.6) è misurabile.
16
S. Lancelotti, Lezioni di Analisi Matematica II
z
z = β(x, y)
Ω
z = α(x, y)
y
D
x
Allora, applicando un procedimento analogo a quello utilizzato nella dimostrazione
del Teorema (4.2), si ha che
Z
f (x, y, z) dx dy dz =
Ω
Z "Z
D
β(x,y)
#
f (x, y, z) dz dx dy.
α(x,y)
Formula di
integrazione per
fili paralleli
all’asse z
Similmente si introducono le formule di integrazioni per fili paralleli agli altri assi.
Asse y. Sia Ω ⊆ R3 l’insieme
n
o
Ω = (x, y, z) ∈ R3 : (x, z) ∈ D, α(x, z) ≤ y ≤ β(x, z) ,
dove D ⊆ R2 è compatto e α, β : D → R sono due funzioni continue tali che
α(x, z) ≤ β(x, z) per ogni (x, z) ∈ D, e sia f : Ω → R una funzione continua.
Allora si ha che
Z
f (x, y, z) dx dy dz =
Ω
Z "Z
D
β(x,z)
α(x,z)
#
f (x, y, z) dy dx dz.
Formula di
integrazione per
fili paralleli
all’asse y
Asse x. Sia Ω ⊆ R3 l’insieme
n
o
Ω = (x, y, z) ∈ R3 : (y, z) ∈ D, α(y, z) ≤ x ≤ β(y, z) ,
17
4.2 Calcolo degli integrali tripli
dove D ⊆ R2 è compatto e α, β : D → R sono due funzioni continue tali che
α(y, z) ≤ β(y, z) per ogni (y, z) ∈ D, e sia f : Ω → R una funzione continua.
Allora si ha che
Z
f (x, y, z) dx dy dz =
Ω
Z "Z
D
#
β(y,z)
f (x, y, z) dx dy dz.
α(y,z)
Formula di
integrazione per
fili paralleli
all’asse x
Integrazione per strati paralleli ad un piano
Premettiamo la seguente
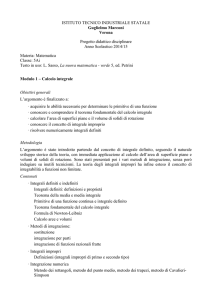
Siano Ω ⊆ R3 limitato e z0 ∈ R. Poniamo
(4.3) Definizione
n
o
Ωz0 = (x, y) ∈ R2 : (x, y, z0 ) ∈ Ω .
Osserviamo che Ωz0 è la proiezione ortogonale sul piano xy dell’intersezione fra Ω e
il piano z = z0 . Se questa intersezione è l’insieme vuoto, allora anche Ωz0 = ∅.
z
z0
Ω
y
Ω z0
x
In modo del tutto analogo, se x0 , y0 ∈ R si introducono gli insiemi
n
o
Ωx0 = (y, z) ∈ R2 : (x0 , y, z) ∈ Ω ,
n
o
Ωy0 = (x, z) ∈ R2 : (x, y0 , z) ∈ Ω .
Formule di integrazione per strati paralleli ad un piano
18
S. Lancelotti, Lezioni di Analisi Matematica II
Piano xy. Siano Ω ⊆ R3 l’insieme
n
o
Ω = (x, y, z) ∈ R3 : a ≤ z ≤ b, (x, y) ∈ Ωz ,
dove Ωz =
n
o
(x, y) ∈ R2 : (x, y, z) ∈ Ω , e f : Ω → R una funzione continua
e limitata. Supponiamo che Ωz sia misurabile in R2 per ogni z ∈ [a, b] (e di
conseguenza anche Ω risulta misurabile in R3 ). Allora, applicando un procedimento
analogo a quello utilizzato nella dimostrazione del Teorema (4.2), si ha che
Z
f (x, y, z) dx dy dz =
Ω
b Z
Z
f (x, y, z) dx dy dz.
Ωz
a
Formula di
integrazione per
strati paralleli
al piano xy
Similmente si introducono le formule di integrazioni per strati paralleli agli altri
piani.
Piano xz. Siano Ω ⊆ R3 l’insieme
n
o
Ω = (x, y, z) ∈ R3 : a ≤ y ≤ b, (x, z) ∈ Ωy ,
dove Ωy =
n
o
(x, z) ∈ R2 : (x, y, z) ∈ Ω , e f : Ω → R una funzione continua e
limitata. Supponiamo che Ωy sia misurabile in R2 per ogni y ∈ [a, b]. Allora si ha
che
Z
f (x, y, z) dx dy dz =
Ω
Z
b
"Z
#
f (x, y, z) dx dz dy.
Ωy
a
Formula di
integrazione per
strati paralleli
al piano xz
Piano yz. Siano Ω ⊆ R3 l’insieme
n
o
Ω = (x, y, z) ∈ R3 : a ≤ x ≤ b, (y, z) ∈ Ωx ,
dove Ωx =
n
o
(y, z) ∈ R2 : (x, y, z) ∈ Ω , e f : Ω → R una funzione continua e
limitata. Supponiamo che Ωx sia misurabile in R2 per ogni x ∈ [a, b]. Allora si ha
che
Z
Ω
f (x, y, z) dx dy dz =
Z
b Z
a
Ωx
f (x, y, z) dy dz dx.
Formula di
integrazione per
strati paralleli
al piano yz
19
4.2 Calcolo degli integrali tripli
Introduciamo ora, senza dimostrarlo, il teorema del cambiamento di variabile negli
integrali multipli.
Nel seguito considereremo n ∈ N con n ≥ 1.
(4.4) Teorema
Siano
Ω, Ω0
(del cambiamento di variabile negli integrali multipli)
n
⊆ R aperti misurabili, f : Ω → R una funzione continua e limitata e
Φ : Ω0 → Ω una funzione tale che:
i) Φ è biiettiva;
ii) Φ è di classe C 1 con det JΦ (u) 6= 0 per ogni u ∈ Ω0 .
Allora
Formula del
Z
f (x) dx =
Ω
Z
Ω0
f (Φ(u))| det JΦ (u)| du.
cambiamento di
variabile negli
integrali multipli
(4.5) Osservazione La funzione Φ è quella che produce il cambiamento di variabili,
da u a x che, essendo in dimensione maggiore di uno, è anche detta del cambiamento di
coordinate.
È evidente la somiglianza fra questa formula e l’analoga nel caso unidimensionale
Z
b
f (x) dx =
a
Z
β
f (ϕ(t)) ϕ0 (t) dt,
(a = ϕ(α), b = ϕ(β)).
α
In questo caso si pone formalmente x = ϕ(t), e nell’integrale di sinistra si sostituisce x
con ϕ(t), il differenziale dx con ϕ0 (t) dt e gli estremi a e b rispettivamente con α e β tali
che a = ϕ(α) e b = ϕ(β).
Nel caso multidimensionale si procede in modo analogo. Formalmente si pone x =
Φ(u) e nell’integrale di sinistra si sostituisce x con Φ(u). A questo punto vanno sostituiti
gli “estremi di integrazione”, che in questo caso è il dominio, da Ω a Ω0 tale che Φ(Ω0 ) = Ω
e il “differenziale”, da dx a | det JΦ (u)| du. La differenza sostanziale non è tanto nella
presenza del determinante della matrice Jacobiana di Φ quanto nella presenza del modulo
dello stesso. È bene non scordarlo per non commettere errori.
20
S. Lancelotti, Lezioni di Analisi Matematica II
Si fa comunque notare che questa formula è esattamente l’estensione in due variabili
di quella unidimensionale. Infatti, ricordando che nel caso unidimensionale gli intervalli
sono orientati, se Ω0 = [α, β] e Ω = ϕ(Ω0 ) = [ϕ(α), ϕ(β)], allora ϕ è crescente. Essendo
derivabile su un intervallo, ϕ0 ≥ 0 da cui segue che | det Jϕ (t)| = |ϕ0 (t)| = ϕ0 (t). Quindi
posto x = ϕ(t) si ha che
Z
f (x) dx =
Ω
=
Se invece
Ω0
Z
Z
[α,β]
f (x) dx =
[ϕ(α),ϕ(β)]
f (ϕ(t))| det Jϕ (t)| dt =
= [α, β] e Ω =
ϕ(Ω0 )
Z
β
Z
ϕ(β)
f (x) dx =
ϕ(α)
f (ϕ(t)) ϕ0 (t) dt.
α
= [ϕ(β), ϕ(α)], allora ϕ è decrescente. Essendo
derivabile su un intervallo, ϕ0 ≤ 0 da cui segue che | det Jϕ (t)| = |ϕ0 (t)| = −ϕ0 (t).
Quindi posto x = ϕ(t) si ha che
Z
f (x) dx =
Ω
=−
Z
ϕ(β)
f (x) dx = −
ϕ(α)
Z
f (x) dx =
[ϕ(β),ϕ(α)]
Z
[α,β]
Z
ϕ(α)
f (x) dx =
ϕ(β)
f (ϕ(t))| det Jϕ (t)| dt =
Z
β
f (ϕ(t)) ϕ0 (t) dt.
α
(4.6) Osservazione La formula del cambiamento di variabile continua a valere anche
se Φ non è iniettiva, oppure se det JΦ = 0, su un sottoinsieme di misura nulla di Ω0 .
Infatti, come sottolineato nella Proposizione (3.3), gli insiemi di misura nulla non danno
alcun contributo nell’integrale.
Per dimostrare questa proprietà richiamiamo inizialmente un risultato notevole
dell’integrale di Riemann del quale omettiamo la dimostrazione.
(4.7) Teorema Sia A ⊆ Rn misurabile. Allora m(A) = 0 se e solo se int(A) = ∅.
Come conseguenza di questo teorema si ha il seguente risultato.
(4.8) Proposizione Siano A ⊆ Rn misurabile con m(A) = 0 e Φ : A → Rn una
funzione continua.
Allora m(Φ(A)) = 0.
Dimostrazione. Per assurdo supponiamo che m(Φ(A)) > 0. Per il Teorema precedente
allora int(Φ(A)) 6= ∅. Quindi esiste y ∈ int(Φ(A)), ovvero esiste y interno a Φ(A). Per
definizione di punto interno, esiste r > 0 tale che Br (y) ⊆ Φ(A), dove Br (y) è la palla
21
4.2 Calcolo degli integrali tripli
aperta di centro y e raggio r. Poiché Φ−1 (Φ(A)) = A, esiste x ∈ A tale che Φ(x) = y.
Essendo Φ continua e Br (y) aperto, si ha che Φ−1 (Br (y)) è aperto. Quindi esiste ρ > 0
tale che Bρ (x) ⊆ Φ−1 (Br (y)) ⊆ A. Ne segue che
0 < m (Bρ (x)) ≤ m(A) :
assurdo perché per ipotesi m(A) = 0. Pertanto m(Φ(A)) = 0.
Ora siamo in grado di dimostrare l’affermazione contenuta nell’Ossevazione (4.6),
che corrisponde alla seguente proprietà.
(4.9) Teorema Siano Ω, Ω0 ⊆ Rn aperti misurabili, A ⊆ Ω0 misurabile con
m(A) = 0, f : Ω → R una funzione continua e limitata e Φ : Ω0 → Ω una
funzione suriettiva tale che:
i) Φ|Ω0 \A : Ω0 \ A → Ω è iniettiva;
ii) Φ è di classe C 1 su Ω0 con det JΦ (u) 6= 0 per ogni u ∈ Ω0 \ A.
Allora
Formula del
Z
f (x) dx =
Ω
Z
Ω0
cambiamento di
f (Φ(u))| det JΦ (u)| du.
variabile negli
integrali multipli
Dimostrazione. Per la Proposizione precedente si ha che m(Φ(A)) = 0. Essendo Φ
suriettiva si ha che
Ω \ Φ(A) = Φ(Ω0 ) \ Φ(A) ⊆ Φ Ω0 \ A ⊆ Ω.
Sia B ⊆ Ω0 \ A tale che Φ(B) = Ω \ Φ(A).
Supponiamo che f ≥ 0 su Ω (analogamente si procede se f ≤ 0 su Ω). Per la
Proposizione (3.3) e il Teorema (4.4) si ha che
Z
f (x) dx
Ω
=
x
m(Φ(A))=0
Z
f (x) dx
=
x
Ω\Φ(A)
≤
Z
Ω0 \A
f (Φ(u))| det JΦ (u)| du
B
Φ(B)=Ω\Φ(A)
essendo f ≥ 0 e B ⊆ Ω0 \ A
=
x
m(A)=0
Z
Z
Ω0
f (Φ(u))| det JΦ (u)| du ≤
f (Φ(u))| det JΦ (u)| du.
22
S. Lancelotti, Lezioni di Analisi Matematica II
Inoltre sempre per la Proposizione (3.3) e il Teorema (4.4) si ha che
Z
Ω0
f (Φ(u))| det JΦ (u)| du
=
x
m(A)=0
essendo f ≥ 0 e Φ(Ω0 \ A) ⊆ Ω
Z
Ω0 \A
≤
Z
f (Φ(u))| det JΦ (u)| du =
Z
Φ(Ω0 \A)
f (x) dx ≤
f (x) dx.
Ω
Ne segue che
Z
Ω
f (x) dx =
Z
Ω0
f (Φ(u))| det JΦ (u)| du.
In generale se f cambia segno, si ha che f = f + − f − , dove f + e f − sono rispettivamente
la parte positiva e la parte negativa di f , definite da
+
f (x) =
(
f (x) se f (x) ≥ 0
0
se f (x) < 0,
−
f (x) =
(
−f (x) se f (x) ≤ 0
0
se f (x) > 0.
Osservando che f + , f − ≥ 0, si ha che la tesi vale per f + e f − e per l’additività
dell’integrale vale anche per f , essendo f = f + − f − .