C6. Il moto rettilineo uniforme e il moto uniformemente accelerato
Il moto rettilineo uniforme
v
Se il moto rettilineo uniforme, il vettore v è costante; cioè ha sempre lo stesso modulo, la stessa direzione e lo stesso
verso.
v
Viceversa, se il vettore v è costante:
v
a) il moto è rettilineo, perché la direzione di v , che è tangente alla traiettoria, non cambia;
v
b) il moto è uniforme, perché il modulo di v è costante, sicché il punto materiale percorre spazi uguali in tempi
uguali.
Formalmente, la legge oraria può essere determinata ricorrendo alla tecnica dell’integrale indefinito, o a quella
dell’integrale definito. Tuttavia, è preferibile ottenere le equazioni in modo induttivo, per confronto con le analoghe
espressioni per il moto in una dimensione:
moto unidimensionale
moto in due dimensioni
Forma vettoriale
Forma scalare
x = vot + xo
r r
r
r = v o t + ro
x = v ox t + x o
y = v oy t + y o
v = vo
v v
v = vo
v x = v ox
v y = v oy
a=0
r
a=0
a x = 0
a y = 0
Il moto uniformemente accelerato
La descrizione vettoriale del moto rettilineo uniforme non riserva particolari sorprese; le proprietà fenomenologiche
elementari restano identiche (traiettoria rettilinea, spazi uguali percorsi in tempi uguali). Il moto uniformemente
accelerato mostra maggiore varietà: in particolare, la traiettoria può essere rettilinea oppure parabolica, a seconda
dell’angolo tra il vettore accelerazione e il vettore velocità iniziale.
Mantenendo il procedimento induttivo, è comunque facile scrivere le equazioni per il moto in due dimensioni, a partire
da quelle corrispondenti per il caso unidimensionale. I risultati sono nella tabella seguente.
moto unidimensionale
moto in due dimensioni
Forma vettoriale
Forma scalare
1
2
x = 2 a ox t + v ox t + x o
y = 1 a t2 + v t + y
oy
oy
o
2
1
x = a o t 2 + vo t + x o
2
r 1r 2 r
r
r = a o t + v o t + ro
2
v = a o t + vo
r r
r
v = a o t + vo
v x = a ox t + v ox
v y = a oy t + v oy
a = ao
r r
a = ao
a x = a ox
a y = a oy
Moto con accelerazione longitudinale
Se l’accelerazione è parallela alla velocità iniziale, la traiettoria è rettilinea. La dimostrazione è molto più semplice se
r v
si adotta un sistema di riferimento con l’asse x orientato parallelamente ai vettori a o , v o ; in questo modo si ha1:
aox = ao
vox = vo
;
;
aoy = 0
voy = 0
e le equazioni del moto diventano:
1
2
x = a o t + vo t + x o
→
2
y = yo
Al variare di t, x assume valori diversi, mentre y resta costante. La traiettoria, dunque, giace sulla retta tratteggiata, di
equazione y = yo.
La velocità varia nel tempo secondo le equazioni:
r 1r 2 r
r
r = a o t + v o t + ro
2
r r
r
v = a o t + vo
→
v x = a ox t + v ox
vy = 0
In sintesi, nel caso di accelerazione longitudinale tutta la descrizione si riporta al caso unidimensionale.
1
Questo esempio dimostra, per l’appunto, quanto sia utile poter scegliere liberamente il sistema di riferimento in cui
proiettare le equazioni vettoriali.
Equazione parametrica della traiettoria
Al variare del parametro t, la legge oraria individua le coordinate delle posizioni occupate dal punto materiale e
descrive, quindi, il luogo geometrico corrispondente alla traiettoria. E’ pertanto giusto affermare che la legge oraria
coincide con l’equazione parametrica della traiettoria.
Si consideri a titolo di esempio la seguente legge oraria:
1
2
x = 2 a ox t + v ox t + x o
y = 1 a t2 + v t + y
oy
oy
o
2
aox = 2 m s-2
vox = -10 m s-1
xo = 10 m
aoy = 1 m s-2
voy = 1 m s-1
yo = -1 m
In questo caso, l’accelerazione non è parallela al vettore velocità iniziale.
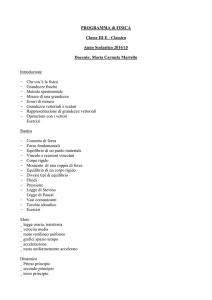
A partire dalle equazioni, è facile compilare la tabella mostrata in basso. Le colonne in giallo contengono le coordinate
delle posizioni occupate dal punto materiale durante il moto; riportate in un diagramma cartesiano xy, forniscono la
rappresentazione della traiettoria mostrata a destra.
t (s)
x (m)
y (m)
1
2
3
4
5
6
7
8
9
10
1
-6
-11
-14
-15
-14
-11
-6
1
10
0.5
3
6.5
11
16.5
23
30.5
39
48.5
59
−
I tratti in arancio sono un’interpolazione grafica tra i dati;
−
i vettori in grigio rappresentano le velocità, le cui componenti sono calcolate, nei vari istanti, dalle formule:
v x = a ox t + v ox
;
v y = a oy t + v oy
−
i vettori in azzurro rappresentano l’accelerazione (costante).
Moto di un proiettile
Sulla scorta della tradizione di Galileo, è invalso l’uso di chiamare proiettile un qualunque oggetto lanciato in aria, che
si muova dunque sotto l’azione della forza di gravità dovuta alla Terra.2 Mentre il moto verticale di un tale oggetto è
stato già affrontato in termini di cinematica del moto unidimensionale, resta da discutere cosa accade quando la
traiettoria non è rettilinea.
Il proiettile è soggetto a un’accelerazione costante. Il vettore accelerazione di gravità è indicato
r
r
r
con il simbolo g . Pertanto, nelle equazioni del moto, si porrà a o = g .
r
Nel sistema di riferimento mostrato a fianco, le componenti3 del vettore g sono gx = 0; gy = -g.
Dalle equazioni del moto uniformemente accelerato, con le sostituzioni indicate, si ricavano quelle riportate nella
tabella in basso.
r 1r 2 r
r
r = g t + v o t + ro
2
→
x = v ox t + x o
1
2
y = − 2 g t + v oy t + y o
r r
r
v = g t + vo
→
v x = v ox
v y = − g t + v oy
r r
a=g
→
a x = 0
a y = − g
Attenzione! Nella colonna a sinistra i segni sono tutti positivi. I segni negativi compaiono solo nella colonna a
destra, perché gy = -g !
Seguono alcune considerazioni:
−
Se la velocità iniziale ha componente orizzontale nulla, nelle equazioni va posto vox = 0.
Il proiettile si muove lungo la retta verticale x = xo; si torna alla descrizione unidimensionale del moto dei gravi.
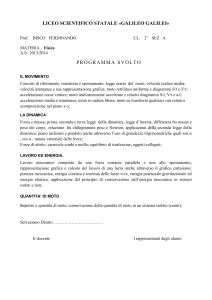
−
Se invece vox ≠ 0, si presenta la situazione mostrata in figura. In termini dell’angolo θ,
r
detto angolo di lancio, le componenti del vettore v o si scrivono:
vox = vo cos θ
voy = vo sen θ
−
2
3
Le equazioni scalari dimostrano la legge di composizione dei moti di Galileo. Infatti, il proiettile segue le leggi del
moto rettilineo uniforme nella componente x, e del moto di caduta di un grave nella componente y. Su questo
punto si tornerà, discutendo del principio di relatività del moto.
Il termine proiettile non sarà dunque, nel seguito, suggestivo di arma!
Si ricordi che il simbolo g indica la costante positiva pari a 9.8 ms-2.
Equazione esplicita della traiettoria del proiettile
L’equazione esplicita di un luogo geometrico lega direttamente le variabili x e y. Si può ottenere l’equazione esplicita
della traiettoria del proiettile, eliminando il parametro t tra le due equazioni della legge oraria.
Si consideri il caso di un proiettile che parte dall’origine del sistema di riferimento (xo = 0; yo = 0). La legge oraria si
scrive:
x = v ox t
1
2
y = 2 g t + v oy t
Dalla prima equazione si ricava t =
y=−
g
2
2
v ox
x2 +
v oy
v ox
x
; e sostituendo nella seconda:
v ox
x
Seguono alcuni commenti:
−
Le componenti della velocità possono essere calcolate in termini dell’angolo di lancio; sostituendo nell’equazione
le espressioni vox = vo cos θ ; voy = vo sen θ , si ottiene:
y=−
2
v o2
g
x 2 + tg θ x
2
cos θ
−
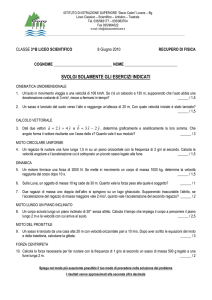
L’equazione esplicita della traiettoria esprime la quota y come polinomio di II grado in x; da questa forma
canonica si conclude che la traiettoria è una parabola.4
−
Poiché il coefficiente del termine di II grado è negativo, i rebbi sono rivolti verso il basso e, dunque, nella stessa
r
direzione del vettore g .
voy costante
voy = 10 m s-1
vox = 20 m s-1
vox = 10 m s-1
vox = 5 m s-1
4
vo costante
vo = 10 m s-
1
θ = 30°
θ = 45°
θ = 60°
Non è difficile convincersi del fatto che per tutti i moti uniformemente accelerati la traiettoria è una parabola con
asse parallelo al vettore accelerazione (ad esclusione del caso, già discusso, di accelerazione longitudinale).
Gittata del proiettile
La gittata è la distanza orizzontale percorsa dal proiettile. Se si assume che il proiettile parta dall’origine del sistema di
riferimento, la gittata è pari all’ascissa x, per la quale sia y = 0. Si può dunque valutare x dall’equazione della
traiettoria:
0=−
v oy
g
x2 +
x
2
v ox
2 v ox
Si tratta di un’equazione di II grado spuria. Risolvendo:
v
− g x + oy
2
2v
v ox
ox
x=0
x=0
v oy
g
− 2 v2 x + v = 0
ox
ox
→
;
x=0
2 v ox v oy
x=
g
Delle due soluzioni, la prima indica la coordinata di partenza, la seconda quella di arrivo, cioè la gittata.
Ponendo vox = vo cos θ ; voy = vo sen θ , si trova x =
x=
2 v o2 sen(θ) cos(θ)
; e ricordando poi che sen(2θ) = 2sen θ cos θ :
g
v o2 sen(2θ)
g
A parità di velocità di lancio vo, la massima gittata si ottiene se sen(2 θ) = 1, cioè per θ = 45°.
Per determinare il tempo impiegato dal proiettile per toccare il suolo, si usa la prima delle equazioni scalari per la legge
oraria:
x = vox t
→
e sostituendo l’espressione x =
t=
t=
x
v ox
2 v ox v oy
g
, infine:
2 v oy
g
Il tempo necessario al proiettile per toccare terra non dipende dalla componente orizzontale della velocità.
Quota massima del proiettile
La componente verticale della velocità del proiettile soddisfa l’equazione:
vy = voy – gt
Durante la salita, vy > 0 ; durante la discesa, vy < 0 . L’altezza massima è dunque raggiunta
quando vy = 0 :
0 = voy – gt
;
t=
v oy
g
2 v oy
Si ricordi che il proiettile impiega il tempo t =
g
per toccare terra; sicché il tempo impiegato per salire è uguale a
quello per tornare al suolo.
La quota massima h si determina, ponendo t =
h = v oy t −
e infine:
h=
2
v oy
2g
1 2
gt
2
;
h = v oy
v oy
g
v oy
−
g
nell’espressione y = −
1 v oy
g
2 g
2
;
h=
1
g t 2 + v oy t :
2
1 v oy
g
2 g
2