Compito 15/4/99
pagina 1
Meccanica Applicata alle Macchine
compito del 15/4/99
A) Chi deve sostenere l'esame del I° modulo deve svolgere i punti 1 e 2.
B) Chi deve sostenere l'esame completo deve svolgere i punti 1, 3 e 4.
C) Chi deve sostenere l'esame del II° modulo deve svolgere i punti 3 e 4.
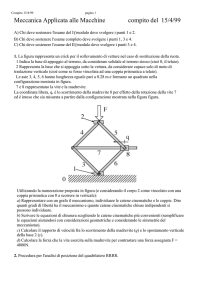
1. La figura rappresenta un crick per il sollevamento di vetture nel caso di sostituzione della ruota.
1 Indica la base di appoggio al terreno, da considerare solidale al terreno stesso (cioè 0, il telaio).
2 Rappresenta la base che si appoggia sotto la vettura, da considerare capace solo di moto di
traslazione verticale (cioè come se fosse vincolata ad una coppia prismatica a telaio).
Le aste 3, 4, 5, 6 hanno lunghezza eguale pari a 0.28 m e formano un quadrato nella
configurazione mostrata in figura.
7 e 8 rappresentano la vite e la madrevite.
La coordinata libera, q, è lo scorrimento della madrevite 8 per effetto della rotazione della vite 7
ed è inteso che sia misurata a partire dalla configurazione mostrata nella figura figura.
Utilizzando la numerazione proposta in figura (e considerando il corpo 2 come vincolato con una
coppia prismatica con 0 a scorrere in verticale):
a) Rappresentare con un grafo il meccanismo, individuare le catene cinematiche e le coppie. Dire
quanti gradi di libertà ha il meccanismo e quante catene cinematiche chiuse indipendenti si
possono individuare.
b) Scrivere le equazioni di chiusura scegliendo le catene cinematiche più convenienti (semplificare
le equazioni aiutandosi con considerazioni geometriche e considerando le simmetrie del
meccanismo).
c) Calcolare il rapporto di velocità fra lo scorrimento della madrevite (q) e lo spostamento verticale
della base 2 (y).
d) Calcolare la forza che la vite esercita sulla madrevite per contrastare una forza assegnata F =
4000N.
Soluzione.
Compito 15/4/99
pagina 2
Per individuare le catene cinematiche è utile immaginare il meccanismo secondo una vista
esplosa, come sotto.Si evidenzia in questo modo che esistono diverse coppie rotoidali
sovrapposte: a,b; c,d; e,f; g,h. Inoltre ci sono due coppie prismatiche: i che consente al
corpo 8 di scorrere su 7 (in realtà sarebbe una coppia a vite, ma nello schema piano la
rotazione attorno all'asse della vite non si considera), l che è la coppia prismatica (fittizia)
che obbilga il corpo 2 a traslare in verticale.
Dallo schema esploso è facile ricavare il grafo mostrato sotto (basta rimpicciolire i corpi
fino a farli diventare punti).
Il grafo mostra che ci sono 8 corpi (1 e 0 coincidono) e 10 coppie di classe C2 (di
cui i e l prismatiche, le altre rotoidali). Ci sono 3 catene cinematiche indipendenti (
6 equazioni), 1 grado di libertà e 7 variabili: q,y,θ3,θ6,θ4,θ5,θ7.
Ovviamente il fatto che le aste 3,6,4,5 abbiano lunghezza eguale comporterà che il
quadrilatero relativo sarà un parallelogramma e che le diagonali saranno
rispettivamente verticali e orizzontali (ma questa intuizione dovrà essere
dimostrata con le equazioni di chiusura).
Conviene usare le seguenti catene cinematiche: 037860, 037425860, 037420. La
figura sottostante mostra i vettori necessari per i relativi poligoni (si sfrutta il fatto
che alcune coppie sono coincidenti).
Compito 15/4/99
pagina 3
Le equazioni di chiusura sono dunque:
Z3+ Z7− Z6 = 0
Z3+ Z4− Z5− Z6 = 0
Z3+ Z4− Z0 = 0
per il parallelogramma si ha:
Z3 = l
cos θ 3
sin θ 3
Z6 = l
cos θ 6
sin θ 6
Z4 = l
cos θ 4
sin θ 4
Z5 = l
cos θ 5
sin θ 5
essendo l la lunghezza (eguale) delle quattrop aste (invece i 4 argomenti sono
variabili).
Per la vite si ha:
Z7 = l 2 − q
cos θ 7
sin θ 7
essendo l 2 la lunghezza iniziale della vite (che, come detto, è quella
corrispondente alla configurazione quadrata del parallelogramma in figura) e q la
corsa della madrevite (2 variabili qui).
Infine:
Z0 = y 0
1
essendo y la posizione verticale della base 2 (più precisamente della coppia
rotoidale) ed essendo la direzione di scorrimento verticale.
Sostituendo nella seconda equazione di chiusura (quella del parallelogramma
037425860) si ricava:
−l
cos θ 6
sin θ 6
−l
cos θ 5
sin θ 5
+l
cos θ 4
sin θ 4
+l
cos θ 3
sin θ 3
=0
Compito 15/4/99
pagina 4
cos θ 4 − cos θ 6 + cos θ 3 − cos θ 5 = 0
sin θ 4 − sin θ 6 + sin θ 3 − sin θ 5 = 0
e si può facilmente verificare che
θ6 = θ4
θ3 = θ5
è una soluzione (ma non l'unica, infatti il quadrilatero si potrebbe assemblare anche
in un altro modo).
Espandendo le altre due equazioni di chiusura, e sfruttando i risultati sopra, si
ricava:
− q + 2 l cos θ 7 − l cos θ 4 + l cos θ 3 = 0
− q + 2 l sin θ 7 − l sin θ 4 + l sin θ 3 = 0
l cos θ 4 + l cos θ 3 = 0
l sin θ 4 + l sin θ 3 − y = 0
La terza equazione mostra che:
θ3 = π − θ4
in accordo con le considerazioni intuitive esposte sopra.
A questo punto le prime due equazioni forniscono:
l cos − θ 4 + π + − q + 2 l cos θ 7 − l cos θ 4 = 0
l sin − θ 4 + π + − q + 2 l sin θ 7 − l sin θ 4 = 0
che risolte danno:
− q + 2 l cos θ 7 − 2 l cos θ 4 = 0
− q + 2 l sin θ 7 = 0
θ7 = 0
cos θ 4 =
1−
2
q+ 2l
l
noto θ4 la quarta equazione fornisce y:
y = 2 l sin θ 4
Per calcolare il rapporto di velocità si possono derivare le 4 equazioni di chiusura
sopra riportat (oppure soltanto la prima e la quarta utilizzando i risultati ricavati
esplicitamente per θ7 e θ3 dalla terza e seconda).
Derivando tutte e quattro le equazioni si ottiene:
− − q + 2 l sin θ 7 ∂ θ 7 + l sin θ 4 ∂ θ 4 − l sin θ 3 ∂ θ 3 = cos θ 7 ∂ q
∂t
∂t
∂t
∂t
Compito 15/4/99
pagina 5
− q + 2 l cos θ 7 ∂ θ 7 − l cos θ 4 ∂ θ 4 + l cos θ 3 ∂ θ 3 = sin θ 7 ∂ q
∂t
∂t
∂t
∂t
− l sin θ 4 ∂ θ 4 − l sin θ 3 ∂ θ 3 = 0
∂t
∂t
l cos θ 4 ∂ θ 4 + l cos θ 3 ∂ θ 3 − ∂ y = 0
∂t
∂t
∂t
a questo punto, per evitare l'inversione di una matrice jacobiana 4x4 conviene
proprio utilizzare i risultati precedenti:
θ7 = 0
θ3 = π − θ4
Le equazioni si semplificano:
2 l sin θ 4 ∂ θ 4 = ∂ q
∂t
∂t
0=0
0=0
2 l cos θ 4 ∂ θ 4 − ∂ y = 0
∂t
∂t
dalla prima equazione si ha:
∂ θ =1
∂ q
1
∂ t 4 2 l sin θ 4 ∂ t
che sostituito nella quarta da:
∂ y = cos θ 4 ∂ q
∂t
sin θ 4 ∂ t
da cui il rapporto di velocità:
τ =
cos θ 4
sin θ 4
Per calcolare la forza esercitata dalla vite si applica il teorema dei lavori virtuali (
indicando con Q la forza):
Q δq − F δy = 0
δy
Q=
F
δq
Q = τF
e si vede che il rapporto di velocità (e quindi la forza Q) diminuisce quando le aste
si muovono verso la direzione verticale.
2. Procedura per l'analisi di posizione del quadrilatero RRRR.
Compito 15/4/99
pagina 6
3. La figura sottostante rappresenta una lavatrice, composta di un telaio di massa m, del cestello di
massa m' e di una massa m'' che rappresenta la biancheria. Il telaio ha dimensioni 0.8 m x 1.2 m (
rispettivamente larghezza e altezza). il cestello ha diametro 0.6 m. I baricentri di telaio e cestello
coincidono con il centro C del telaio stesso, che è anche l'asse di rotazione del cestello. L'asse del
cestello si considera vincolato rigidamente al telaio (cioè non è sospeso elasticamente). La biancheria
si assume che sia disposta eccentricamente, nel punto P, ad una distanza r = 0.2 m dall'asse del
cestello C. Il cestello ruota a velocità angolare costante ω. Il telaio della lavatrice è sospeso
elasticamente sulle molle di rigidezza k.
Dati (in unità SI):
m = 20
m' = 2
m'' = 5
r = 0.2
Nell'ipotesi di trascurare i moti laterali e di inclinazione del telaio della lavatrice (cioé considerando
il telaio come capace solo di traslazione verticale) si determini:
a) Le equazioni del moto con approccio lagrangiano.
b) La posizione y0 di equilibrio di C in funzione della rigidezza k. (le molle hanno lunghezza libera
pari a l0) e le equazioni delle piccole oscillazioni rispetto alla posizione di equilibrio.
c) La forza trasmessa al suolo nel caso di molle di rigidezza infinita, per velocità di rotazione ω =
800 giri / min (centrifuga) e ω = 350 giri / min (centrifuga a velocità ridotta).
d) La forza trasmessa al suolo nel caso di molle di rigidezza k = 18.000N / m (per ciascuna molla)
nel caso delle due velocità sopra citate.
e) Il coefficiente di smorzamento necessario a ridurrela forza trasmessa a meno di 2000 N, nel caso
di molle della rigidezza sopra indicata e velocità di centrifuga ridotta. Calcolare il valore della forza
trasmessa in questo caso alla velocità di centrifuga massima.
Soluzione.
Equazioni del moto con approccio lagrangiano:
Posizione del baricentro C di telaio e cestello (detta y la lunghezza attuale delle
molle):
yC = y + 0.6
xC = 0
Compito 15/4/99
pagina 7
Posizione del baricentro P della biancheria:
yP = yC + r sin ω t
xP = xC + r cos ω t
Energia cinetica (si trascura quella di rotazionedel cestello perché costante):
T=
1
2
m + m'
∂ yC
∂t
2
+ ∂ xC
∂t
2
+ 12 m''
∂ yP
∂t
2
+ ∂ xP
∂t
2
T = 12 m'' 2 ω r y' cos ω t + y' 2 + ω 2 r 2 + 12 m + m' y' 2
avendo indicato con y' la velocità:
∂ y = y'
∂t
Energia potenziale delle 2 molle:
V' = 2 12 k y − l 0
2
Energia potenziale gravitazionale:
V'' = m + m' g yC + m'' g yP
V'' = m + m' g y + 0.6 + g m'' r sin ω t + y + 0.6
Energia potenziale totale:
V = V' + V''
V = m + m' g y + 0.6 + k y − l 0 2 + g m'' r sin ω t + y + 0.6
Posizione di equilibrio:
∂ V =0
∂y
y 0 = l 0 − 12
m + m' + m'' g
k
Equazioni del moto:
L = T−V
∂ ∂ L − ∂ L =0
∂ t ∂ y'
∂y
m + m' + m'' ∂ ∂ y + 2 k y = ω 2 m'' r sin ω t + 2 k l 0 − g m − g m' − g m''
∂t ∂t
Sostituendo y con una coordinata q misurata dalla posizione di equilibrio:
q = y − y0
Compito 15/4/99
pagina 8
m + m' + m'' ∂ ∂ q + 2 k q = ω 2 m'' r sin ω t
∂t ∂t
l'equazione si semplifica e diventa quella di un sistema con forzante armonica,
dove il modulo della forza è:
F = ω 2 m'' r
Nel caso di molle di rigidezza infinita questa è la forza trasmessa al terreno (infatti
la trasmissibilità vale 1):
ω = 350
2π
60
F = 1343.4
ω = 800
2π
60
F = 7018.4
notare che i valori sono elevati.
Nel caso la lavatrice sia sospesa elasticamente la trasmissibilità vale:
T=
1
ω
1−
ωn
2
essendo (vedere l'equazione):
k = 18000
2k
m + m' + m''
ω n = 36.515
ωn =
Le forze trasmesse diventano:
ω = 350
2π
60
FT = FT
F T = 1343.4 132.94
F T = 1.7859×105
ω = 800
2π
60
FT = FT
F T = 7018.4 0.23453
F T = 1646
notare che la forza trasmessa alla velocità di 350 giri / minuto cresce per effetto
della risonanza, per ovviare a questa condizione si può aggiungere uno smorzatore
in parallelo alle molle. Indicata con c la costante di smorzamento l'espressione
della trasmissibilità diventa:
1+ 2ζ
T=
1−
ω
ωn
2 2
ω
ωn
2
+ 2ζ
ω
ωn
2
Compito 15/4/99
pagina 9
affinché la forza trasmessa sia inferiore a 2000 N occorre che la trasmissibilità sia
al massimo:
ω = 350
2π
60
2000
T = 1343.4
T = 1.4888
sostituendo nell'espressione di T e risolvendo in ζ si ha:
ωζ
2
ωn
ωζ
2
ωn
2
2
+ 1 = 1.4888
ωζ
2
ωn
ωζ
+ 1 = 2.2165 2
ωn
2
che significa:
c = ζ 2 2 k m + m' + m''
c = 890.47
con
c = 890.47
ζ = 0.4516
le forze trasmesse diventano:
ω = 800
2π
60
FT = FT
F T = 3406.4
4. Descrivere il metodo QFD.
ω
+ −
ωn
ω
+ −
ωn
ζ = 0.4516
ω = 350
2π
60
FT = FT
F T = 2000
2
+1
2
2
+1
2
2