Capitolo VI
Risposta in frequenza
Nel capitolo I è stata brevemente introdotta la risposta in frequenza di un amplificatore (o,
meglio, di reti a singola costante di tempo). Si è anche accennato all’effetto delle capacità sul
comportamento in frequenza dei dispositivi.
In questo capitolo si fa un breve riferimento alla frequenza complessa s ed ai concetti associati
di poli e di zeri. Vengono poi trattate le risposte in frequenza (bassa e alta) di amplificatori in BJT e
MOS a singolo stadio. Le risposte in frequenza di amplificatori multistadio si ricavano con le stesse
procedure di analisi presentate in questo capitolo. Sebbene si tratti di tecniche di analisi, tuttavia se
ne possono dedurre criteri di progetto in quanto si considerano i limiti della risposta in frequenza ed
i metodi per estendere la larghezza di banda.
6.1 Analisi nel dominio s: poli, zeri e diagrammi di Bode
Il problema principale consiste nel determinare il guadagno di tensione di un amplificatore
come funzione di trasferimento nella variabile complessa s.
Nel dominio s una capacità C è sostituita da un’ammettenza sC o, equivalentemente, da
un’impedenza 1/sC mentre un’induttanza L è sostituita da un’impedenza sL. Quindi, usando
tecniche di analisi convenzionali, si può derivare la funzione di trasferimento in tensione
T(s) ≡
Vo (s)
. Si può poi passare alle frequenze fisiche sostituendo s con jω; la funzione di
Vi (s)
trasferimento T(jω) è una quantità complessa. Al variare di ω si può rappresentare la risposta di
ampiezza e la risposta di fase dell’amplificatore diagrammando l’ampiezza e la fase di T(jω).
La forma di T(s) può fornire molte utili informazioni sul circuito in esame. In molti casi,
un’espressione di T(s) può essere del tipo :
a msm + a m −1s m −1 + ........ + a 0
T(s) = n
s + b n −1s n −1 + ........ + b0
(6.1)
in cui i coefficienti ai e bj sono numeri reali e l’ordine m del numeratore è minore o uguale
all’ordine n del denominatore; quest’ultimo è chiamato ordine della rete.
203
Per garantire la stabilità di un amplificatore in modo che esso non generi segnali, i
coefficienti del denominatore bj devono essere tali che le radici del denominatore abbiano parte
reale negativa.
Poli e zeri
Un altro modo di esprimere T(s) è
T(s) = a m
( s − Z1 )( s − Z2 ) ....... ( s − Zm )
( s − P1 )( s − P2 ) ....... ( s − Pn )
(6.2)
dove am è una costante moltiplicativa, Zi sono le radici del polinomio al numeratore e Pj sono le
radici del polinomio al denominatore. Zi sono detti zeri della funzione di trasferimento o zeri di
trasmissione e Pj sono detti poli della funzione di trasferimento o modi naturali della rete.
I poli e gli zeri possono essere sia numeri reali che complessi. Poiché i coefficienti ai e bj sono
numeri reali, i poli complessi (o gli zeri) devono essere coppie coniugate.
Uno zero immaginario puro (± jωz) annulla T(jω) per ω = ωZ. Infatti il numeratore avrà i
fattori (s+jωZ)(s-jωZ) = s2 + ωZ2 che, per frequenze fisiche, vale (-ω2 + ωZ2). Perciò T(jω) è zero per
ω = ωZ. Ad esempio, il circuito d’ingresso di un televisore ha lo zero in corrispondenza delle
frequenze di interferenza. Uno zero reale non porta a T = 0.
Infine, si noti che per valori di s che sono molto più grandi di quelli dei poli e degli zeri, la
funzione di trasferimento diventa T(s) !
am
, che ha (n –m ) zeri a s = ∞.
sn −m
Funzioni del primo ordine
La funzione di trasferimento del primo ordine è quella di una rete STC ed assume la forma
generale
T(s) =
a1s + a 0
s + ω0
(6.3)
in cui – ω0 è la posizione del polo reale. La quantità ω0, detta frequenza di polo, è pari all’inverso
della costante di tempo di una rete STC. Le costanti a0 e a1 determinano il tipo di rete STC.
204
Per reti passa-basso del primo ordine si ha
T(s) =
a0
s + ω0
(6.4).
In questo caso il guadagno dc è a0/ω0 e ω0 è la frequenza a 3dB. Questa funzione di trasferimento ha
uno zero a s = ∞.
La funzione di trasferimento di reti passa-alto del primo ordine è
T(s) =
a1s
s + ω0
(6.5).
Diagrammi di Bode
Tali diagrammi servono a rappresentare l’ampiezza e la fase di una funzione di trasferimento.
Se si considera la forma della funzione di trasferimento espressa dalla (6.2) si può vedere che T(s) è
un prodotto di fattori (s + a). Da questo segue che la risposta d’ampiezza in dB della rete può essere
2
2
ottenuta sommando i termini del tipo 20 log10 a + ω oppure 20 log10
2
ω
1 + se si estrae a.
a
La risposta di fase si ottiene sommando i termini della forma tan −1 (ω / a) . In entrambi i casi i
termini corrispondenti ai poli si sommano con i segni negativi.
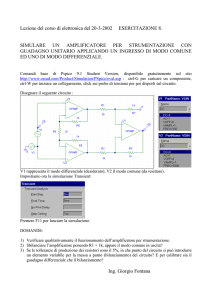
Un diagramma di Bode di un tipico termine di ampiezza è riportato in figura 6.1.
Figura 6.1 Diagramma di Bode di un tipico termine d’ampiezza
205
L’asintoto a bassa frequenza è una linea orizzontale a 0 dB e l’asintoto ad alta frequenza è una linea
retta con pendenza di 6dB/ottava (o, equivalentemente, 20dB/decade). I due asintoti si intersecano
in corrispondenza della frequenza ω3dB = a che è detta “corner frequency”.
Per ottenere il diagramma di Bode per l’ampiezza di una funzione di trasferimento, si
tracciano prima gli asintoti per ciascun polo e zero. La pendenza dell’asintoto della curva ad alta
frequenza per uno zero è +20dB/decade mentre per un polo è –20dB/decade. I diversi plot sono poi
sommati e l’intera curva è spostata verticalmente di una quantità determinata dalla costante
moltiplicativa della funzione di trasferimento.
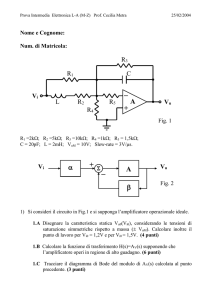
La figura 6.2 riporta il diagramma di Bode relativo alla fase; nel caso specifico a è stato
assunto negativo.
Figura 6.2 Diagramma di Bode di un tipico termine di fase
L’andamento asintotico è costituito da tra segmenti: il primo è orizzontale a φ = 0 e si estende fino a
ω = 0.1 a , il secondo ha una pendenza di –45°/decade e si estende da ω = 0.1 a fino a ω = 10 a ed
il terzo ha pendenza nulla al livello φ = -90°. La risposta di fase completa può essere ottenuta
sommando i diagrammi asintotici della fase di tutti i poli e zeri.
6.2 Funzione di trasferimento di un amplificatore
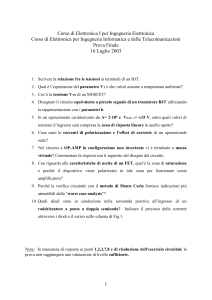
Si considerino le funzioni guadagno di tensione delle due forme mostrate in figura 6.3.
206
Figura 6.3 Risposta in frequenza per (a) amplificatore dc e (b) amplificatore accoppiato capacitivamente
Le tre bande di frequenza
Come si può vedere dalla Fig. 6.3b, il guadagno dell’amplificatore è quasi una costante su un
ampio intervallo di frequenza chiamato banda intermedia. In questo intervallo di frequenze tutte le
capacità (di accoppiamento , di bypass ed interne del transistore) hanno effetti trascurabili e
possono essere ignorate nel calcolo del guadagno. All’estremità dello spettro ad alta frequenza il
guadagno si abbassa a causa dell’effetto delle capacità interne del dispositivo. All’estremità a bassa
frequenza dello spettro le capacità di accoppiamento e di bypass non funzionano più da corto
circuiti e questo provoca una caduta del guadagno. L’estensione della banda intermedia è definita
dalle due frequenze limite ωL e ωH. Queste sono le frequenze alle quali il guadagno scende di 3dB
rispetto al valore della banda intermedia.
La larghezza di banda dell’amplificatore è generalmente definita come
BW = ωH − ωL
(6.6)
e, poiché, ωL << ωH, si può porre
BW ! ωH
(6.7).
Una figura di merito dell’amplificatore è il suo prodotto guadagno-larghezza di banda,
definito come:
GB = A M ωH
(6.8)
207
dove AM è l’ampiezza del guadagno nella banda intermedia.
La funzione guadagno A(s)
Il guadagno dell’amplificatore in funzione della frequenza complessa s può essere espresso
nella forma generale
A(s) = A M FL (s)FH (s)
(6.9)
dove FL(s) e FH(s) sono funzioni che tengono conto della dipendenza del guadagno dalla frequenza,
rispettivamente, nella banda a bassa frequenza e nella banda ad alta frequenza. Per ω >> ωL si ha
FL(ω) ≈ 1; se ω << ωH FH(s) ≈ 1. Infine, per ωL << ω << ωH A(s) ≈ AM. A basse frequenze A(s) ≈
AMFL(s) mentre alle alte frequenze A(s) ≈ AMFH(s).
Il guadagno nella banda intermedia è determinato analizzando il circuito equivalente
dell’amplificatore con l’ipotesi che le capacità di accoppiamento e di bypass agiscano da corto
circuiti e che le capacità interne del modello del transistore si comportino come circuiti aperti. La
funzione di trasferimento a bassa frequenza, AL(s), è determinata dall’analisi del circuito
equivalente dell’amplificatore includendo le capacità di accoppiamento ed di bypass ma ipotizzando
che le capacità del modello del transistore si comportino come circuiti aperti. La funzione di
trasferimento ad alta frequenza, AH(s), è determinata dall’analisi del circuito equivalente
dell’amplificatore includendo le capacità del modello del transistore ma ipotizzando che le capacità
di accoppiamento e di bypass si comportino come corto circuiti.
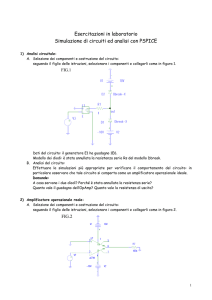
In figura 6.4 è riportata una rappresentazione schematica di quanto appena detto.
Figura 6.4 Le tre bande di frequenza che caratterizzano la risposta in frequenza di amplificatori accoppiati
capacitivamente
208
Risposta a bassa frequenza
La funzione di trasferimento FL(s) che caratterizza la risposta a bassa frequenza di un
amplificatore assume la forma generale
FL (s) =
( s + ωZ1 )( s + ωZ2 )"( s + ωZn
( s + ωP1 )( s + ωP2 )"( s + ωPn
L
L
)
)
(6.10)
dove ωP1, ωP2, ωPnL sono numeri positivi che rappresentano le frequenze degli nL poli a bassa
frequenza e ωZ1, ωZ2, ωZnL sono numeri positivi, negativi o nulli che rappresentano gli nL zeri.
Si può notare che quando s tende a ∞, FL(s) tende a 1.
La zona di bassa frequenza di interesse per il progettista è quella intorno a ωL, che è più
prossima alle frequenze intermedie, poiché nel progetto bisogna stimare e, se necessario, modificare
ωL. Spesso gli zeri sono a frequenze molto più basse di ωL. E poiché di solito uno dei due poli (ωP1)
ha una frequenza molto più elevata di quella degli altri poli, vicino alla banda intermedia, si può
scrivere:
FL (s) !
s
s + ωP1
(6.11)
che è la funzione di trasferimento di una rete passa-alto del primo ordine.
In questo caso ωL ≈ ωP1 perché la risposta in frequenza è dominata dal polo. Questa
approssimazione detta del polo dominante è un modo semplice per determinare ωL.
Diversamente è necessario considerare il diagramma di Bode completo di FL ( ω) e determinare ωL.
Se non esiste un polo dominante a bassa frequenza, può essere ricavata una formula
approssimata per ωL in termini di poli e zeri. Per semplicità si consideri il caso di un circuito avente
due poli e due zeri nella banda a bassa frequenza; cioè:
FL (s) =
( s + ωZ1 )( s + ωZ2 )
( s + ωP1 )( s + ωP2 )
(6.12).
Sostituendo s = jω ed elevando al quadrato si ha
209
FL ( jω)
2
(ω
=
(ω
)(
)( ω
2
+ ω2Z1 ω2 + ω2Z2
2
2
+ ωP1
2
2
+ ωP2
)
)
(6.13).
1
, quindi
2
2
Per definizione per ω = ωL, si ha FL ( ω) =
(
(
)(
)(
)
)
(
(
)(
)(
) (
) (
)(
)(
ω2 + ω2Z1 ω2 + ω2Z2
1 + 1/ ω2L ω2Z1 + ω2Z2 + 1/ ω4L ω2Z1ω2Z2
1
=
=
2
2
2
2
2 2
2
1 + 1/ ωL2 ωP1
ω2 + ωP1
ω2 + ωP2
+ ωP2
+ 1/ ωL4 ωP1
ωP2
)
)
(6.14).
Poiché ωL è generalmente più grande delle frequenze di tutti i poli e gli zeri, si può trascurare
il termine (1/ωL4) e si risolve per ωL ottenendo
2
2
ωL ! ωP1
+ ωP2
− 2ω2Z1 − 2ω2Z2
(6.15)
Questa relazione può essere estesa ad un qualsiasi numero di poli e zeri.
Se uno dei poli è dominante, ad esempio P1, allora ωP1 >> ωP2, ωZ1, ωZ2 e ωL ≈ ωP1.
Risposta ad alta frequenza
La funzione di trasferimento FH(s) che caratterizza la risposta ad alta frequenza di un
amplificatore può essere espressa nella forma generale
FH (s) =
(1 + s / ωZ1 )(1 + s / ωZ2 )"(1 + s / ωZn
(1 + s / ωP1 )(1 + s / ωP2 )"(1 + s / ωPn
H
H
)
)
(6.16)
dove ωP1, ωP2, ωPnH sono numeri positivi che rappresentano le frequenze degli nH poli reali ad alta
frequenza e ωZ1, ωZ2, ωZnH sono numeri positivi, negativi o infiniti che rappresentano gli nH zeri ad
alta frequenza. Si può notare che quando s tende a 0, FH(s) tende a 1.
La zona di alta frequenza di interesse per il progettista è quella intorno a ωH, che è più
prossima alle frequenze intermedie, poiché nel progetto bisogna stimare e, se necessario, modificare
ωH. Spesso gli zeri sono sia a frequenze infinite che talmente elevate da essere poco significativi
210
nella determinazione di ωH. E poiché di solito uno dei poli (ωP1) ha una frequenza molto più elevata
di quella degli altri poli, la risposta ad alta frequenza dell’amplificatore sarà determinata da quel
polo:
FH (s) !
1
1 + s / ωP1
(6.17)
che è la funzione di trasferimento di una rete passa-basso del primo ordine. Se esiste un polo
dominante ad alta frequenza si ha ωH ≈ ωP1.
Se non esiste un polo dominante ad alta frequenza, ωH può essere determinata dal diagramma
di FH ( ω) . Alternativamente si considera una formula approssimata per ωH in termini di poli e zeri
in modo analogo a quanto fatto nel caso di bassa frequenza.
La formula per ωH è
1
1
2
2
+ 2 "− 2 − 2 "
2
ωP1 ωP2
ωZ1 ωZ2
ωH ! 1
(6.18)
Se uno dei poli è dominante, ad esempio P1, allora ωP1 << ωP2, ωP3, ………, ωZ1, ωZ2,……….e ωH
≈ ωP1.
Determinazione di ωL e di ωH con le costanti di tempo a circuito aperto e in corto circuito
Questa tecnica si usa quando non è facile esprimere la T(s) in termini di poli e zeri. Si può
dimostrare che, in presenza di un polo dominante:
1
ωH ! n
H
∑ Ci R io
(6.19)
i
Rio è la resistenza vista da Ci con tutti gli altri condensatori aperti ed nH è il numero dei poli
in alta frequenza. Analogamente
nL
ωL ! ∑
i
1
Ci R is
(6.20)
211
Per valutare il contributo di Ci tutti gli altri condensatori sono in corto circuito, Ris è la
resistenza vista da Ci ; nL è il numero di poli in bassa frequenza.
6.3 Risposta in bassa frequenza di amplificatori ad emettitore comune
La figura 6.5 mostra un amplificatore ad emettitore comune accoppiato capacitivamente.
Figura 6.5 Stadio amplificatore ad emettitore comune
L’analisi della risposta a bassa frequenza dell’amplificatore ad emettitore comune è
complicata dal fatto che il BJT ha un valore di β finito. Nello specifico, si noti che a basse
frequenze l’impedenza d’ingresso dell’amplificatore include l’effetto di CE e, quindi, CC1 e CE
interagiscono.
La figura 6.6 mostra il circuito equivalente a bassa frequenza dell’amplificatore ad emettitore
comune, che comprende condensatori di accoppiamento e di bypass.
Usando il metodo delle costanti di tempo di corto circuito si può ottenere la frequenza ωL. La
procedura per determinare ωL è la seguente.
Si pone Vs = 0 e CE = CC2= ∞ si determina la resistenza RC1 vista da CC1. Dal circuito
equivalente di Fig. 6.6 con CE pari a ∞ si trova
R C1 = R s + R B // ( rx + rπ )
(6.21)
212
Figura 6.6 Circuito equivalente dell’amplificatore di Fig. 6.5 a bassa frequenza
Poi si pongono CC1 e CC2 a ∞ e si determina la resistenza RE’ vista da CE. Dal circuito
equivalente in Fig. 6.6 si ottiene
R' E = R E //
rπ + rx + ( R B // R s )
β0 + 1
con ro = ∞
(6.22).
Infine, si pongono CC1 e CE a ∞ e si ottiene la resistenza vista da CC2:
R C2 = R L + ( R C // ro )
(6.23)
Un valore approssimato per la frequenza a 3dB può essere determinato dall’equazione (6.20):
ωL !
1
1
1
+
+
CC1R C1 CE R 'E CC2 R C2
(6.24).
Nota la desiderata ωL, poiché generalmente R’E è la più piccola delle tre resistenze RC1, RC2, R’E si
sceglie CE in modo 1/CER’E sia il termine dominante, 1/CER’E ≈ 0.8 ωL cioè CE è il polo dominante
a bassa frequenza. Il rimanente 20% è diviso equamente sugli altri due termini.
Valori tipici sono: CC1 ≈ 3µF; CC2 ≈ 2µF; CE ≈ 50µF; RC1, RC1, R’E dell’ordine dei KΩ.
213
6.4 Risposta in alta frequenza di amplificatori common-source (CS) e common
emitter (CE)
La figura 6.7 mostra un amplificatore MOSFET a CS ed un amplificatore BJT a CE.
Figura 6.7 (a) Amplificatore MOSFET CS; (b) amplificatore BJT CE
Si possono fare le seguenti osservazioni.
-
La presenza di un generatore a corrente costante agevola lo studio del comportamento del
circuito.
-
La messa a terra del segnale (al source o all’emettitore) è ottenuta mediante una grande
capacità di by-pass. Questo condensatore non c’è se il circuito rappresenta la metà di un
amplificatore differenziale.
-
La sorgente di segnale Vs (con Rs) può rappresentare la sorgente o l’equivalente di Thévenin
del circuito all’ingresso, compreso l’eventuale circuito di polarizzazione e l’uscita del
circuito che precede.
-
RL è la resistenza complessiva tra il drain (o il collettore) e la massa e quindi include RD (RC
nel circuito CE)
Circuiti equivalenti per l’analisi in alta frequenza
Sostituendo il FET in Fig. 6.7a con il suo modello circuitale equivalente in alta frequenza si
ottiene il circuito equivalente riportato nella figura seguente.
214
Figura 6.8 (a)Circuito equivalente per l’analisi in alta frequenza del circuito di Fig. 6.7a; (b) circuito semplificato
Un’ulteriore semplificazione si ottiene combinando RL e ro in un’unica resistenza RL’ = RL//ro
come è mostrato in Fig. 6.8b; tale rappresentazione circuitale può essere usata anche per
determinare la risposta in alta frequenza del circuito di Fig. 6.7b. A tal fine si sostituisce il BJT con
il suo modello circuitale equivalente a π ibrido in alta frequenza, ottenendo così il circuito di figura
6.9.
Figura 6.9 (a)Circuito equivalente per l’analisi in alta frequenza del circuito di Fig. 6.7b; (b) circuito semplificato
Si applica il teorema di Thévenin all’ingresso per sostituire Vs, Rs, rπ con la sorgente
equivalente Vs’ e Rs’:
Vs ' = Vs
rπ
R s + rx + rπ
(6.25)
e
215
R s ' = ( R s + rx ) // rπ
(6.26)
e si combinano RL e ro nell’unica resistenza RL’ = RL//ro. Il circuito equivalente è quello mostrato in
Fig. 6.9b che è identico nella struttura a quello dell’amplificatore CS riportato in Fig. 6.8b.
Quindi è sufficiente analizzare il circuito CS e poi cambiare i parametri per riportare i risultati
anche nel caso CE.
Teorema di Miller
Si consideri la situazione mostrata in figura 6.10.
Figura 6.10 Teorema di Miller
Si identificano i nodi 1 e 2, insieme con il terminale di terra di una particolare rete. Tra i nodi 1 e 2
è presente un’ammettenza Y. I nodi 1 e 2 possono essere connessi ad altri componenti ad altri nodi
della rete. Il teorema di Miller fornisce i mezzi per sostituire l’ammettenza Y di “ponte” con due
ammettenze: Y1 tra il nodo 1 e la massa e Y2 tra il nodo 2 e la massa, come mostrato in Fig. 6.10b.
Tale sostituzione è basata sulla premessa che sia possibile determinare il guadagno di tensione tra il
nodo 1 ed il nodo 2, indicato con K, dove K ≡
V2
. Se K è noto, i valori di Y1 e di Y2 possono
V1
essere determinati come segue.
Facendo riferimento al circuito in Fig. 6.10a:
V
I1 = Y ( V1 − V2 ) = YV1 1 − 2 = YV1 (1 − K ) .
V1
Per il circuito di Fig. 6.10b:
Y1V1 = I1 .
Combinando le relazioni precedenti si ha:
216
Y1 = Y (1 − K )
(6.27).
In modo analogo si ha:
V
1
I 2 = Y ( V2 − V1 ) = YV2 1 − 1 = YV2 1 − .
K
V2
Dal circuito di Fig. 6.10b:
Y2 V2 = I 2
Le due relazioni precedenti portano a:
1
Y2 = Y 1 −
K
(6.28).
Le due relazioni (6.27) e (6.28) sono le due condizioni necessarie e sufficienti affinché la rete di
Fig. 6.10b si equivalente a quella di Fig. 6.10a.
Il teorema di Miller è usato per determinare l’impedenza di ingresso o il guadagno di un
amplificatore. Esso non può essere usato per determinare l’impedenza d’uscita perché è valido
purché le condizioni del circuito non cambino passando dal circuito di Fig. 6.10a a quello di fig.
6.10b.
Analisi della risposta in alta frequenza
Il circuito riportato in Fig. 6.8b è ridisegnato nella forma in figura 6.11a, usata per
determinare la frequenza ωH.
La piccola capacità Cgd dà origine ad una capacità di ingresso tra gate e massa nella forma
C1 = Cgd (1 − K ) ; questa capacità ha una valore piuttosto elevato che sicuramente limiterà la
risposta dell’amplificatore. L’effetto di moltiplicazione di Cgd è noto come effetto di Miller.
La capacità Cgd è piccola quindi la corrente in essa è molto più piccola di quella del
generatore controllato gmVgs. Perciò, trascurando la corrente attraverso Cgd si ha:
Vo ! −g m Vgs R L '
(6.29).
217
Figura 6.11 Circuiti equivalenti per la valutazione della risposta in alta frequenza di un amplificatore CS
Usando il rapporto delle tensioni ai due lati di Cgd, (Vo /Vgs), si può sostituire Cgd con la
capacità equivalente di Miller data da
Ceq = Cgd (1 + g m R L ')
(6.30)
come mostrato in Fig. 6.11b.
Il circuito sul lato d’ingresso è un filtro passa-basso del primo ordine la cui costante di tempo
è determinata dalla capacità totale di ingresso
CT = Cgs + Cgd (1 + g m R L ')
(6.31)
e dalla resistenza del generatore di segnale Rs. Questo circuito del primo ordine determina la
risposta in alta frequenza dell’amplificatore CS, introducendo un polo ad alta frequenza.
Quindi la frequenza superiore a 3dB ωH è data da
218
ωH =
1
CT R s
(6.32)
ed il guadagno in alta frequenza può essere espressa come
A H (s) = A M
1
1 + s / ωH
(6.33)
in cui AM rappresenta il guadagno nella banda intermedia.
La piccola capacità Cgd gioca un ruolo importante nella determinazione della risposta in alta
frequenza dell’amplificatore CS. gmRL’ è numericamente grande (praticamente uguale ad AM)
perciò la capacità equivalente di Miller è grande.
Per aumentare ωH si può ridurre gmRL’ oppure ridurre Rs e ciò non è sempre possibile. Un
altro modo sarebbe quello di usare configurazioni circuitali che non soffrono effetto Miller, come
per esempio la configurazione cascode.
6.5 Risposta ad alta frequenza di amplificatori CB
La figura 6.12 mostra un amplificatore a base comune in cui il generatore di segnale è
accoppiato all’emettitore per mezzo di un condensatore di capacità elevata.
Figura 6.12 Stadio amplificatore a base comune
219
Analogamente a quanto visto nel caso di un amplificatore CE, Vs e Rs rappresentano i
parametri equivalenti di Thévenin del circuito che alimenta l’amplificatore CB e può includere
resistori di polarizzazione del transistore Q. RL rappresenta la resistenza totale tra il collettore e la
massa.
Il circuito equivalente ad alta frequenza dell’amplificatore a base comune è mostrato in figura
6.13; per semplicità ro e rx sono state omesse.
Figura 6.13 (a) Circuito equivalente dell’amplificatore CB di Fig. 6.12; (b) versione semplificata
Nel circuito di Fig. 6.13a si osservi che la tensione al terminale di emettitore Ve è pari a –Vπ.
Scrivendo l’equazione di nodo all’emettitore si può esprimere la corrente di emettitore Ie come
1
1
Ie = − Vπ + sCπ − g m Vπ = Ve + g m + sCπ .
rπ
rπ
Quindi, l’ammettenza d’ingresso all’emettitore è:
Ie
1
1
= + g m + sCπ = + sCπ
Ve rπ
re
(6.34).
220
Quindi all’ingresso del circuito il transistore può essere sostituito dalla sua ammettenza d’ingresso,
come mostrato in Fig. 6.13b.
La tensione Vo è determinata dal generatore di corrente gmVπ che alimenta (RL//Cµ); questo
porta alla semplificazione della parte d’uscita del circuito in Fig. 6.13b.
Il circuito semplificato in Fig. 6.13b mostra un’importante caratteristica della configurazione
CB: l’assenza di una capacità interna di retroazione (non c’è effetto Miller). Perciò la frequenza
superiore di cutoff sarà maggiore di quella della configurazione CE.
I poli ad alta frequenza possono essere determinati direttamente dal circuito equivalente di
Fig. 6.13b. All’ingresso si ha un polo la cui frequenza è
1
Cπ ( re // R s )
ωP1 =
(6.35)
Poiché re generalmente è piccola la frequenza ωP1 è abbastanza alta. All’uscita si avrà un polo di
frequenza
ωP2 =
1
Cµ R L
(6.36).
Poiché Cµ è abbastanza piccola la frequenza ωP2 è abbastanza alta.
I poli per un amplificatore CG possono essere determinati usando le due relazioni precedenti
in cui Cπ è sostituita da Cgs, re è sostituita da 1/gm e Cµ è sostituita da Cgd.
6.6 Risposta in frequenza di amplificatori inseguitore di emettitore(CC) ed
inseguitore di source (CD)
Si consideri il circuito inseguitore di emettitore riportato in figura 6.14a, in cui Rs rappresenta
la resistenza del generatore e RE rappresenta la combinazione della resistenza di polarizzazione
dell’emettitore e della resistenza di carico. Il circuito equivalente in alta frequenza è mostrato in
Fig. 6.14b ed è ridisegnato in Fig. 6.14c.
221
Figura 6.14 Analisi in alta frequenza dell’inseguitore di emettitore
222
Dall’analisi del circuito si trova che la funzione di trasferimento ha due poli ed uno zero reale:
Vo (s)
1+ s/ωZ
= AM
Vi (s)
(1+ s/ωP1 )(1+ s/ωP2 )
(6.37)
Questo tipo di analisi, però, non rivela la presenza di un polo dominante.
Si può procedere in modo alternativo. Dalla Fig. 6.14c si ha
Vo = (g m + y π )Vπ R E
(6.38)
dove
yπ =
1
+sCπ .
rπ
Quindi Vo sarà nulla in corrispondenza del valore di s che rende Vπ = 0 e del valore di s per cui (gm
+ yπ) = 0. A sua volta Vπ sarà nulla in corrispondenza del valore di s che rende zπ = 0 o,
equivalentemente, yπ = ∞, quindi s = ∞. Questo è uno zero di trasmissione.
L’altro zero di trasmissione si ottiene da
g m + yπ = 0
cioè
gm +
1
+ s z Cπ = 0
rπ
che porta a
sz = -
g m + 1/ rπ
1
=! −ωT
Cπ
Cπ re
(6.39).
Poiché la frequenza di questo zero è piuttosto alta, esso gioca un ruolo minore nella
determinazione della risposta dell’inseguitore di emettitore.
Nella maggior parte delle applicazioni Rs è elevata e con la capacità di ingresso costituisce un
polo dominante. Per vedere questo più chiaramente si consideri il circuito di figura 7.14c e si
invochi il teorema di “source-absorption”. In tal caso la parte di circuito sotto la linea tratteggiata
può essere sostituito dalla sua impedenza equivalente Zeq ≡
Vo
.
y π Vπ
Quindi:
223
Zeq =
( g m + yπ ) R E
(6.40).
yπ
Si noti che Zeq è semplicemente RE riflessa dalla parte della base attraverso l’uso di una forma
generalizzata della regola di riflessione: RE è moltiplicata per (hfe + 1).
L’impedenza totale tra B’ e la massa è
Zb ' =
1 + gmR E
1
+ Zeq =
+ RE .
yπ
yπ
Come mostrato in Fig. 6.15d, questa impedenza può essere rappresentata da una resistenza RE in
serie ad una rete RC che consiste di una resistenza (1 + gmRE)rπ in parallelo con una capacità Cπ/(1
+ gmRE). Poiché l’impedenza del circuito parallelo RC è generalmente molto più grande di RE, si
può trascurare quest’ultima impedenza ottenendo una rete STC passa-basso, che ha un polo
espresso da:
Cπ
ωP = Cµ +
R s '// (1 + g m R E ) rπ
1 + gmR E
−1
(6.41).
La frequenza associata a questo polo è molto alta per cui l’inseguitore di emettitore ha una grande
larghezza di banda.
Gli stessi risultati valgono per il MOSFET sostituendo Rs’ con Rs, rπ con ∞, Cµ con Cgd e Cπ
con Cgs.
224