1
Controlli automatici
Comportamento a regime dei sistemi
di controllo
Ing. Alessandro Pisano
[email protected]
2
Il comportamento a regime dei sistemi di controllo si riferisce alla analisi degli effetti a
regime di ingressi e disturbi polinomiali (segnali costanti, a rampa, a parabola, etc.,
detti anche “canonici”) oppure ingressi e disturbi avente andamento sinusoidale.
Faremo riferimento a sistemi di controllo a retroazione unitaria
Per quanto concerne il comportamento a regime per ingressi e disturbi canonici risulta di
estremo rilievo la presenza di poli nell’origine nel controllore e/o nel processo
E’ importante sia il numero complessivo di poli nell’origine che la loro “ripartizione” tra
controllore e processo
Il concetto importante e rilevante in tale contesto è quello di “Tipo del sistema di
controllo”, che approfondiremo in seguito.
3
Tutte le considerazioni sviluppate nel presente documento hanno come prerequisito
essenziale che il sistema in Figura sia asintoticamente stabile a ciclo chiuso
In altri termini, richiediamo che la FdT a ciclo chiuso tra il set-point e l’uscita:
abbia tutti i poli a parte reale strettamente negativa
Se vale ciò, risulta essere asintoticamente stabile anche la FdT disturbo-uscita
Polinomio caratteristico del sistema a ciclo chiuso
4
Definizione 1 - Tipo di un sistema di controllo
Con riferimento al sistema di controllo in Figura, si definisce tipo del sistema il
numero complessivo di poli nell’origine presenti nel controllore e nel processo
Un sistema di controllo potrà pertanto essere di tipo zero, di tipo uno, di tipo due, etc.
Nella pratica raramente si eccede il tipo due (a causa dei problemi di stabilità a ciclo
chiuso conseguenti alla presenza di un elevato numero di poli nell’origine in catena
diretta), e i sistemi di tipo uno sono quelli largamente più diffusi.
5
Sistemi di controllo di tipo zero
Se il sistema è di tipo zero è sempre possibile esprimere le FdT di processo e
controllore nella forma seguente
Tale decomposizione mette in evidenza i guadagni in bassa frequenza (anche denominati guadagni
in continua, o semplicemente guadagni) e del regolatore e del processo, rispettivamente.
Risposta al set-point costante (con disturbo nullo)
Analizziamo la risposta a regime per un set-point costante (il disturbo d(t) è
temporaneamente posto pari a zero).
6
Per determinare il valore di regime della uscita y(t) del sistema a ciclo chiuso applicando il
teorema del valore finale si deve determinare la sua TdL Y(s).
Il valore a regime non dipende separatamente dai guadagni Kr e Kp, ma soltanto dal loro prodotto.
Da un sistema di controllo si desidera che l’uscita riproduca il più fedelmente possibile il setpoint. Per quanto concerne il comportamento a regime si vorrebbe ottenere la relazione di
uguaglianza
Impossibile da ottenere !
7
Tale procedura, che comunque conduce sempre ad un valore inferiore ad uno, deve tener
conto del fatto che il sistema a ciclo chiuso può risultare destabilizzato da un valore troppo
elevato del guadagno in catena diretta
Una analisi preliminare basata sul luogo delle radici risulta utile a comprendere in
quale misura è possibile incrementare il guadagno incatena diretta senza
incorrere in fenomeni di instabilità del sistema a ciclo chiuso, eventualità che
ovviamente invalida tutte le considerazioni sviluppate in precedenza.
8
Kr=2
Kr=20
Kr=100
Si noti come il valore di regime si avvicina sempre più al set-point.
E’ d’obbligo verificare che in corrispondenza dei valori suggeriti per Kr il
sistema a ciclo chiuso si mantiene asintoticamente stabile
9
Il luogo delle radici rivela come il
sistema in esame e’ stabile a ciclo
chiuso per ogni valore di Kr.
K r*
K r*
1
1
3
K r* 3
10
Risposta al disturbo costante (con set-point nullo)
Ora analizziamo l’uscita a regime del sistema sotto l’ipotesi di disturbo costante,
considerando temporaneamente il set-point nullo. Si ha per ipotesi
La FdT tra il disturbo e la variabile di uscita è
11
Il valore a regime dell’uscita in risposta ad un disturbo costante (e con set-point nullo) dipende
separatamente dai guadagni Kr e Kp e non più soltanto dal loro prodotto.
Da un sistema di controllo si desidera che l’uscita riproduca il più fedelmente
possibile il set-point operando la compensazione degli effetti del disturbo; quindi per quanto
concerne il comportamento a regime a fronte di un disturbo si vorrebbe che
Impossibile da ottenere !
Anche nel contesto della reiezione dei disturbi, l’incremento del guadagno del controllore si
rileva lo strumento progettuale utile a garantire determinate specifiche (ad esempio, sulla
attenuazione minima richiesta per il disturbo sull’uscita)
12
13
Risposta al set-point e al disturbo costanti agenti simultaneamente
Si ha infatti
da cui si ricava, con procedura analoga a prima, il seguente valore di regime per l’uscita nelle
condizioni in esame
all’aumentare di Kr si realizza, con precisione progressivamente crescente, la relazione
14
Considerazioni aggiuntive
Le considerazioni sviluppate valgano anche in casi più generali in cui set-point e disturbi siano
tempo varianti ma tendano ad un valore costante per t tendente all’infinito
L’evoluzione transitoria dell’uscita può risultare, naturalmente, completamente differente
rispetto alla applicazione di set-point e disturbi costanti, ma il valore di regime è
comunque lo stesso
Per sistemi di controllo di tipo zero abbiamo visto quindi come le uniche grandezze che
intervengono nella determinazione dei valori di regime dell’uscita siano il guadagno del
processo ed il guadagno del regolatore
15
Sistemi di controllo di tipo uno
Lo schema in retroazione in Figura viene detto di tipo 1 se nel regolatore, oppure nel processo, è
presente un polo nell’origine
I due casi sono equivalenti per quanto concerne la risposta al set-point, ma conducono a
comportamenti differenti per quanto concerne la risposta al disturbo, pertanto verranno
trattati separatamente.
16
Sistemi di controllo di tipo uno con polo nel regolatore
Se il sistema è di tipo uno, e se il polo nell’origine è presente nel regolatore, è sempre
possibile esprimere le FdT di processo e controllore nella forma seguente
Si deve assumere, al solito, che la funzione di trasferimento a ciclo chiuso sia
asintoticamente stabile. Applicando il Teorema del valore finale si ottiene
17
E’ stato ricavato un risultato completamente differente rispetto ai sistemi di tipo zero. Tale
relazione mostra come il valore di regime dell’uscita coincida esattamente con il valore del
set-point indipendentemente dai valori del guadagno del regolatore e del processo.
Un sistema di controllo di tipo 1 con il polo nel regolatore è in grado di operare la reiezione
completa a regime di un disturbo costante. Il valore di regime dell’uscita dovuto alla sola
presenza del disturbo è pari a zero indipendentemente dall’ampiezza D del disturbo e dai
guadagni di regolatore e processo
18
Tale relazione stabilisce una importante proprietà di precisione statica robusta
La relazione si conserva difatti indipendentemente dai guadagni, e dalla struttura
dinamica (poli e zeri), del regolatore e del processo
Essa è unicamente garantita dalla presenza del polo nell’origine nel regolatore (e
dalla stabilità a ciclo chiuso).
E’ uno dei motivi della ampia diffusione dei regolatori PI.
L’intera trattazione perde di validità se il sistema a ciclo chiuso
non è asintoticamente stabile.
19
Esempio 6
Riscriviamo le FdT del processo e del regolatore in accordo con la decomposizione
20
La particolare espressione tempovariante del disturbo rende possibile l’applicazione dei
risultati conseguiti in precedenza in quanto d(t) tende asintoticamente al valore D=10.
Tale relazione è valida se Kr=1 e se Kr=5, ma non più quando Kr=20, valore
del guadagno in corrispondenza del quale il sistema a ciclo chiuso è instabile.
Ps a3 s 3 a2 s 2 a1s a0
stabile se
a1a2 a3a0
Pcar s ss 1s 4 2K r s 3 5s 2 4s 2K r
stabile se
4 5 2K r
K r K rcr 10
21
22
Sistemi di controllo di tipo uno con polo nel processo
Se il sistema è di tipo uno, e se il polo nell’origine è presente nel processo, è sempre possibile
esprimere le FdT di processo e controllore nella forma seguente
Quando il disturbo è pari a zero, la risposta al set-point costante del sistema a ciclo chiuso
non dipende separatamente dalle FdT di regolatore e processo, ma solo dal loro prodotto, che
per le due diverse tipologie di sistemi di controllo di tipo uno è equivalente
Si ha quindi che la relazione
vale anche per i sistemi di tipo uno con polo nel processo
Con riferimento invece alla risposta al disturbo, le cose cambiano
23
Si può notare come in questa tipologia di sistemi di controllo di tipo uno l’effetto del disturbo a
regime è diverso da zero
Cosi come nei sistemi di tipo zero, tale effetto può essere ridotto incrementando il guadagno
del regolatore (senza eccedere in valori che destabilizzino il sistema a ciclo chiuso).
Tutti i sistemi fisici, per effetto delle inevitabili dinamiche non modellate, vengono
destabilizzati da valori di guadagno troppo elevati.
Una differenza tra i sistemi di tipo uno qui considerati ed i sistemi di tipo zero è che nei primi
l’errore a regime dovuto al disturbo dipende solo dal guadagno del regolatore, e non da quello
del processo come invece avveniva nella precedente relazione calcolata per i SdC di tipo zero.
24
Sistemi di controllo di tipo 1 con set-point a rampa
Consideriamo il comportamento di un sistema di controllo di tipo uno avente la
solita struttura e soggetto ad un set-point a rampa
con disturbo posto pari a zero.
L’uscita del sistema a ciclo chiuso tenderà a divergere per t che tende ad infinito,
poichè anche il set-point tende a divergere asintoticamente
Si può facilmente verificare come per la TdL Y(s) risultante siano violate le
condizioni di applicabilità del teorema del valore finale
25
La FdT tra il set-point e l’errore è
Si ha pertanto
26
Esempio 7
Si consideri il sistema di controllo in retroazione in Figura, con un processo del primo
ordine asintoticamente stabile e un regolatore da progettare
Le specifiche di controllo sono le seguenti
- S1. Un set-point costante deve essere copiato a regime con un errore massimo dell’1%
- S2. Un disturbo costante deve essere attenuato a regime in misura pari almeno al 99%
Le specifiche sono compatibili con le prestazioni di un sistema di controllo di tipo zero
Quindi un semplice regolatore proporzionale R(s)= KR potrebbe essere in grado
di soddisfare entrambe le specifiche.
Una rapida analisi mediante LdR indica come il sistema a ciclo chiuso resta stabile
per qualunque valore, anche arbitrariamente grande, del guadagno kR
Abbiamo ora la certezza che un regolatore proporzionale, opportunamente tarato,
risolve il problema.
Polinomio caratteristico del sistema a ciclo chiuso con il regolatore proporzionale
Il polo a ciclo chiuso assume il seguente valore in dipendenza dal guadagno kR
28
Il sistema a ciclo chiuso è di fatto rappresentato dalle FdT set-point uscita
e disturbo-uscita
Siamo in grado di “prevedere” accuratamente le traiettorie della variabile di uscita
mettendo a frutto quanto visto a proposito della risposta al gradino dei sistemi
elementari
29
- S1. Un set-point costante deve essere copiato a regime con un errore massimo dell’1%
- S2. Un disturbo costante deve essere attenuato a regime in misura pari almeno al 99%
E’ consigliabile scegliere un valore incrementato di una certa percentuale per
compensare possibili variazioni parametriche sfavorevoli
30
Nota. Se il set-point, o il disturbo, variano in maniera sufficientemente lenta
rispetto alle costanti di tempo piu lente delle FdT a ciclo chiuso, le proprietà di
precisione statica e reiezione del disturbo continuano a essere qualitativamente
soddisfatte.
Per chiarire meglio questo aspetto, una lenta deriva del set-point in un sistema di
controllo di tipo uno da luogo ad una corrispondente analoga deriva per l’uscita, con
il mantenimento, a regime, della seguente relazione
anche a fronte di ampie, purché lente, escursioni del set-point, con un andamento
qualitativo simile a quello seguente
31
Sistemi di controllo di tipo due
Nell’ambito delle diverse possibili casistiche di sistemi di controllo di tipo due,
analizziamo quella con maggior rilevanza pratica, che è quella in cui è presente un
polo nell’origine nel regolatore, ed un polo nell’origine nel processo
il valore di regime dell’uscita sotto l’azione simultanea di un set-point costante
ydes(t)=Yd e di un disturbo costante d(t)=D risulta essere pari al valore del set-point
Si ha in sintesi la proprietà di precisione statica robusta indipendentemente dai
guadagni, e dalla struttura dinamica, del regolatore e del processo
Tale proprietà è unicamente garantita dalla presenza del polo nell’origine nel
regolatore (e dalla stabilità a ciclo chiuso).
32
Sistemi di controllo di tipo due con set-point e disturbi a rampa
Set point a rampa (e disturbo nullo)
disturbo nullo
L’uscita del sistema a ciclo chiuso tenderà a divergere per t che tende ad infinito
Analizziamo, come fatto in precedenza, il comportamento a regime della variabile
di errore e(t)=ydes(t)-y(t).
La FdT tra il set-point e l’errore è
33
La FdT tra il set-point e l’errore è
Si ha pertanto
che ha per ipotesi tutti i poli a parte reale strettamente negativa (in conseguenza
della stabilità asintotica a ciclo chiuso, prerequisito essenziale)
Quindi la variabile di errore e(t)=ydes(t)-y(t) ammette un limite finito, che vale
34
Evoluzioni qualitative dell’uscita e dell’errore
Set point a rampa e relativa
variabile di uscita in un sistema di
contollo di tipo 2
Variabile di errore in un
sistema di contollo di tipo 2
con set point a rampa
35
Disturbo a rampa (e set point nullo)
ydes(t)=0
Si mostra facilmente che
36
Set point costante e disturbo a rampa
ydes(t)=Yd
Il valore di regime dell’uscita del sistema di tipo due in esame è valutabile con
semplicità applicando il principio di sovrapposizione degli effetti
37
Tabelle riassuntive
Nelle seguenti tabelle si riassumono i risultati delle analisi fin qui svolte con
riferimento alla risposta al set-point ed al disturbo di sistemi di tipo 0, 1 e 2 (per
set-point e disturbi costanti, a rampa, o parabolici).
Si forniscono, nelle ultime righe e/o colonne delle Tabelle, anche alcune relazioni
non precedentemente dimostrate
Risposta al set-point (con disturbo nullo)
Risposta al disturbo (con set-point nullo)
38
Principio del modello interno
Un principio di validità generale che caratterizza in maniera semplice e compatta il
comportamento a regime dei sistemi di controllo
Tratta in maniera unificata le proprietà di inseguimento del set-point e di reiezione dei
disturbi
Introduciamo una terminologia:
diremo che un sistema (o, equivalentemente, una Funzione di
Trasferimento) “contiene il modello” di un certo segnale z(t) se tra i
poli del sistema (o della FdT) sono contenuti anche i poli della
Trasformata di Laplace Z(s) del segnale
Come conseguenza di avrà che:
•Un sistema “contiene il modello” di un segnale costante del tipo z(t)=C se possiede almeno un polo
nell’origine.
•Un sistema “contiene il modello” di un segnale a rampa del tipo z(t)=Ct se possiede almeno due poli
nell’origine.
•Un sistema “contiene il modello” di un segnale sinusoidale del tipo z(t)=C cos(*t+) se possiede i due poli
complessi coniugati p1,2=j*
39
I due seguenti enunciati si applicano al sistema in Figura nell’ipotesi che questo sia
asintoticamente stabile a ciclo chiuso
Enunciato 1 (inseguimento del set-point). L’uscita y(t) ottenuta con un set-point
ydes(t) qualunque e con disturbo d(t) nullo converge asintoticamente al set-point se, e
solo se, la FdT a ciclo aperto F(s)=R(s)P(s) contiene il modello del set-point
Enunciato 2 (reiezione del disturbo). L’uscita y(t) ottenuta con un set-point
ydes(t)=0 e con disturbo d(t) qualunque converge asintoticamente a zero se, e
solo se, la FdT R(s) del regolatore contiene il modello del disturbo.
I due enunciati possono essere dimostrati impiegando il teorema del valore
finale, un esercizio lasciato al lettore
40
I due enunciati implicano, come caso particolare, gran parte delle proprietà dimostrate
nelle sezioni precedenti per i sistemi di controllo di tipo 1 e 2 con riferimento a set-point e
disturbi costanti e a rampa
Ad esempio, la reiezione di un disturbo costante è garantita se e solo se il regolatore R(s)
contiene un polo nell’origine
La capacità di inseguire asintoticamente un set-point a rampa (avere cioè l’uscita
che tende asintoticamente a sovrapporsi alla rampa di set-point) è garantita se e
solo se nella FdT di catena diretta sono presenti almeno due poli nell’origine.
E’ errore frequente concludere che un certo sistema in retroazione possiede
determinate proprietà di precisione a regime basandosi sulla sola presenza del
necessario numero di poli nell’origine e trascurando di verificare la stabilità a ciclo
chiuso. Tale omissione conduce a conclusioni del tutto errate circa il comportamento
del sistema.
41
Esempio
Si consideri il sistema di controllo in retroazione in Figura, con un processo del primo ordine
asintoticamente stabile ed un disturbo sinusoidale
Progettare un regolatore in modo da garantire la reiezione asintotica del disturbo.
Applicando il principio del modello intermo concludiamo come i regolatori R(s) che
soddisfano la specifica (reiezione asintotica del disturbo) sono tutti e soli i regolatori R(s)
aventi una coppia di poli complessi coniugati p1,2=j e tali, nel contempo, da garantire
la stabilità a ciclo chiuso del sistema in retroazione
Ricerchiamo pertanto un regolatore nella
forma
42
Scelta più semplice
Sistema in retroazione instabile per qualunque valore di kR.
Non va bene !
43
Aggiungiamo uno zero
k R 1 s
Rs 2
s 1
Im
1s
Zero del regolatore sovrapposto al
polo del processo
x j1
x
1
Re
x j1
44
Aggiungiamo uno zero
Rs
k R 1 s
s2 1
Im
1s
Zero del regolatore sovrapposto al
polo del processo
x j1
Re
Non va bene !
x j1
45
Spostiamo lo zero
k R 1 s
Rs 2
s 1
0 1s
Zero più in alta frequenza rispetto al
polo del processo
Im
1
1
0
xs
2
Non va bene !
1
1
x
1
xs
x
1
x
Re
46
Spostiamo ancora lo zero
k R 1 s
Rs 2
s 1
1s
1
1
Zero più in bassa frequenza rispetto al
polo del processo
1
1
0
xs
2
Ok !
Im
x
x
1
Re
1
x
47
48
Zero più in alta frequenza
rispetto al
polo del processo
49
Zero più in bassa
frequenza rispetto al
polo del processo
50
Disturbo avente forma piu generale
51
clear all
clc
num_P=2;
den_P=[1 1];
P=tf(num_P,den_P)
kR=1;
tau=2;
num_R=kR*[tau 1];
den_R=[1 0 1];
R=tf(num_R,den_R)
W_dy=P/(1+R*P);
t=(0:0.01:30);
d=2*sin(t+pi/3);
Y=lsim(W_dy,d,t);
plot(t,Y),grid
1.5
1
0.5
0
-0.5
-1
-1.5
0
5
10
15
20
25
30
52
clear all
clc
num_P=2;
den_P=[1 1];
P=tf(num_P,den_P)
kR=1;
tau=2;
num_R=kR*[tau 1];
den_R=[1 0 1];
R=tf(num_R,den_R)
1.5
kR=1
kR=3
1
0.5
0
W_dy=P/(1+R*P);
t=(0:0.01:30);
d=2*sin(t+pi/3);
-0.5
-1
Y1=lsim(W_dy,d,t);
kR=3;
num_R=kR*[tau 1];
R=tf(num_R,den_R)
W_dy=P/(1+R*P);
Y2=lsim(W_dy,d,t);
-1.5
0
plot(t,Y1,t,Y2),grid,legend('kR=1','kR=3')
5
10
15
20
25
30
53
Vediamo se una scelta differente del regolatore consente di prescindere dalla
conoscenza della posizione del polo del processo.
k 1 1s 1 2 s
Rs R
s2 1
Due zeri e due poli
Grado relativo 0 (n=m)
Zeri entrambi più in alta
frequenza rispetto al
polo del processo
0 1 1
0 2 1
Ok
1
2
1
Im
x
x
Re
1
1
x
54
Rs
k R 1 1s 1 2 s
s2 1
Zeri entrambi più in bassa
frequenza rispetto al
polo del processo
1 1
2 1
Im
x
x
1
1
1
Ok
Re
1
2
x
55
k R 1 1s 1 2 s
Rs
s2 1
Uno zero più in bassa
frequenza rispetto al
polo del processo ed uno zero
piu in alta frequenza
1 1
2 1
Im
x
x
1
1
2
Re
1
1
x
Ok
56
Rs
k R 1 1s 1 2 s
s2 1
1 2 1
Zeri coincidenti, più in bassa
frequenza rispetto al
polo del processo
x
1
Ok
Im
x
Re
1
1
x
Si mostra facilmente come anche la scelta
1 2 1
sistema a ciclo chiuso sempre stabile qualunque sia kR
garantisca un
57
clear all
t=(0:0.01:30);
d=2*sin(t+pi/3);
num_P=2; den_P=[1 1];
P=tf(num_P,den_P)
kR=1;
tau1=2; tau2=3;
num_R=kR*[tau1*tau2 tau1+tau2 1];
den_R=[1 0 1];
R=tf(num_R,den_R)
W_dy=P/(1+R*P);
Y1=lsim(W_dy,d,t);
1.5
1=2,2=3
1=0.5,2=0.8
1
1=0.5,2=2
0.5
0
tau1=0.5; tau2=0.8;
num_R=kR*[tau1*tau2 tau1+tau2 1];
den_R=[1 0 1];
R=tf(num_R,den_R)
W_dy=P/(1+R*P);
Y2=lsim(W_dy,d,t);
-0.5
-1
0
5
10
15
20
tau1=0.5; tau2=2;
num_R=kR*[tau1*tau2 tau1+tau2 1];
den_R=[1 0 1];
R=tf(num_R,den_R)
W_dy=P/(1+R*P);
Y3=lsim(W_dy,d,t);
plot(t,Y1,t,Y2,t,Y3),grid,
legend('\tau1=2,\tau_2=3','\tau1=0.5,\tau_2=0.8','\tau1=0.5,\tau_2=2')
25
30
58
3 2t
Esempio
t
2s 1
kR
s
2
s s 2
y (t )
Im
Analizzare l’evoluzione a regime al
variare di kR
LdR
1
2
2 3 0
xs
2
4
x
2
xx
1
2
Re
59
Il sistema a ciclo chiuso è sempre stabile per ciascun valore di kR
Con disturbo posto pari a zero , la rampa del set point viene riprodotta
esattamente a regime (PMI) -> y(t)=t
Con set-point nullo, la componente costante del disturbo viene asintoticamente
compensata (PMI) -> y(t)=0
La componente del disturbo a rampa causa una aliquota costante sull’uscita, di
ampiezza 2/Kr (PRECISIONE SDC DI TIPO 2 CON UN POLO NEL
REGOLATORE E UN POLO NEL PROCESSO) -> y(t)=2/Kr
Sovrapposizione degli effetti:
2
y t t
KR
60
KR 2
yt t
2
t 1
KR
61
KR 2
2
yt t
t 1
KR
62
RISPOSTA ARMONICA
u t
Gs
yt
G(s) asintoticamente stabile
ut A cos t
yt A G j cos t G j ht
lim t ht 0
Generalizzabile a somme di sinusoidi applicando il principio di sovrapposizione
degli effetti
63
Esempio
u t
yt
2
s 0.5s 1s 2.5
2
Gs
s 0.5s 1s 2.5
ut 2 cos3t
asintoticamente stabile
A2
3
0
yt 2 G j3 cos3t G j3 ht
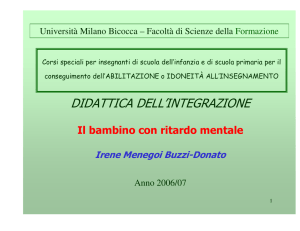
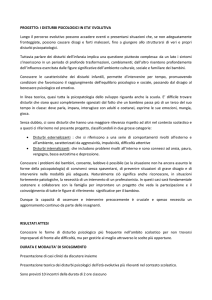
Leggiamo il modulo |G(j3)| e la fase G(j3) dai diagrammi di Bode
64
numF=2;
denF=poly([-0.5 -1 -2.5]);
bode(numF,denF),grid
Bode Diagram
Magnitude (dB)
50
System: sys
Frequency (rad/sec): 3
Magnitude (dB): -25.5
0
-50
-100
Phase (deg)
-150
0
-90
System: sys
Frequency (rad/sec): 3
Phase (deg): -202
-180
-270
-2
10
-1
10
0
10
Frequency (rad/sec)
1
10
2
10
65
Il modulo, espresso in dB nel diagramma, deve essere convertito nel valore naturale
M db 20 log10 M
G j3 db 25.5db
G j3 10
M
M db
100
40
10
20
1
0
0.1
20
0.01
40
M 10
G j 3 db
20
M db
20
10
25.5
20
0.053
66
Convertiamo le fasi in radianti
G j3 202 202
G j3 10
G j 3 db
20
10
2
3.52rad
360
25.5
20
0.053
yt 2 G j3 cos3t G j3 ht
yt 2 0.053 cos3t 3.52 ht 0.1061 cos3t 3.52 ht
67
68
69
2 0.5 sint
Esempio
5
2s 1
s
2
s s 2
y (t )
Il sistema a ciclo chiuso è asintoticamente stabile (mostrato prima)
Analizziamo l’uscita a regime associata al set point:
Analizziamo l’uscita a regime associata alla componente
costante del disturbo
yt 5
yt 0
PMI
PMI
70
Per quanto riguarda la componente sinusoidale del disturbo, facciamo riferimento
al sistema semplificato
0.5 sin t
0
2s 1
s
2
s s 2
Ps
Rs
0.5 sin t
equivalente a
Wdy s
y (t )
y (t )
2
Ps
2
2
ss 2
Wdy s
2
3
2
1 Rs Ps 1 2s 1
s s 2 22s 1 s 2s 2 4s 2
s ss 2
POLI
yt 0.5Wdy j1 cos t Wdy j1 ht
-0.68 1.63i
-0.638
Ci interessa valutare la sola ampiezza
71
numF=2;
denF=[1 2 4 2];
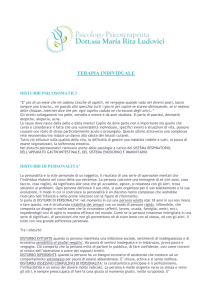
bode(numF,denF),grid
Wdy j
Bode Diagram
0
System: sys
Frequency (rad/sec): 1
Magnitude (dB): -3.53
Magnitude (dB)
-20
-40
-60
-80
-100
Phase (deg)
-120
0
-90
System: sys
Frequency (rad/sec): 1
Phase (deg): -90.6
-180
-270 -2
10
-1
10
0
10
Frequency (rad/sec)
1
10
2
10
72
Il modulo, espresso in dB nel diagramma, deve essere convertito nel valore naturale
y
d
W
j1 db 3.53db
Wdy j1 10
Wdy j1
db
20
10
3.53
20
0.66
yt 0.5Wdy j1 cos t Wdy j1 ht
L’ampiezza della componente oscillatoria sul’uscita dovuta al disturbo ha
ampiezza
0.5Wdy j1 0.33
Sommando le varie componenti, l’uscita y tenderà al valore costante 5 più una
oscillazione di ampiezza 0.33
73
l’uscita y tenderà al
valore costante 5 più
una oscillazione di
ampiezza 0.33
74
Attenuazione dinamica dei disturbi
Analizziamo da un punto di vista differente la capacita di attenuazione a regime di
disturbi sinusoidali, con due o più armoniche distinte
Aggiungere nel regolatore i relativi poli immaginari puri prescritti dal PMI non è
un buon metodo per sopprimere gli effetti del disturbo in quanto conduce
rapidamente all’instabilità
Se, inoltre, non si conoscono a priori le frequenze del disturbo non si è in grado di
collocare adeguatamente gli opportuni poli nel regolatore
Che fare in presenza di disturbi nella forma seguente ?
N
d t di cosi t i
i 1
75
u t
Gs
yt
ut A cos t
y regime t A G j cos t G j
Se
G j 0
G j
allora
y regime t 0
76
Su questa proprietà, applicata alla FdT a ciclo chiuso disturbo/uscita, si basa la
teoria della attenuazione dinamica dei disturbi
y des (t )
d (t )
W
y
y des
s
Wyydes s
Wdy s
Pricipio di sovrapposizione
degli effetti
y(t )
Wdy s
Rs Ps
Y s
des
1 Rs Ps Y s d 0
Ps
Y s
1 Rs Ps Ds u 0
Y s Wyydes s Y des s Wdy s Ds
77
Ragioniamo sulla attenuazione del disturbo con set-point nullo (ydes(t)=0)
d (t )
W s
y
d
y(t )
Se, in un certo range di frequenza [L H],
Wdy j 0
[L , H ]
allora tutte le componenti armoniche del disturbo aventi frequenza nel range [L H],
verranno, a regime, attenuate in maniera pressoché perfetta
N
d t di cosi t i
i 1
i [L , H ] i
yt 0
78
Attraverso quale strumento sistematico di progetto è possibile garantire che,
in un certo range di frequenza [L H] di interesse sia verificata le seguente
relazione ?
Wdy j 0
Wdy s
Wdy j
Ps
1 Rs Ps
[L , H ]
Rs k R Rs
P j
1 k R R j P j
P j
W j
0
1 k R R j P j
y
d
Incremento del
guadagno del
regolatore
se
kR
79
Esempio
Si consideri il sistema di controllo in retroazione in Figura, con un processo del secondo
ordine asintoticamente stabile ed un disturbo sinusoidale
Asint
5
Rs
10 ; 20rad / sec
2
s 1s 2
y (t )
Progettare un regolatore in modo da garantire:
S1 che il set point costante venga riprodotto a regime con un errore massimo dell’1%
S2 che si abbia una attenuazione del disturbo sinusoidale in misura non inferiore al 99%.
Specifiche compatibili con un sistema di controllo di tipo zero.
Cerchiamo una soluzione nella forma seguente
Rs k R
80
Si dimostra facilmente (LdR) che il sistema a ciclo chiuso è sempre stabile
comunque si scelga kR
La specifica S1 è soddisfatta se vale la relazione
Wyydes 0 0.99
k R P0
k
W 0
R 0.99
1 k R P0 1 k R
y
y des
k R 99
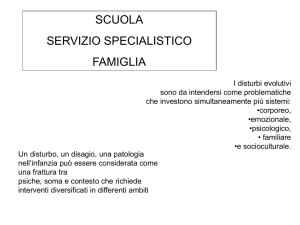
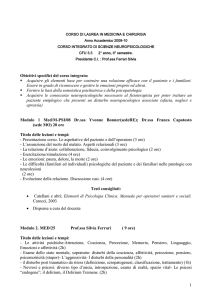
Ragioniamo sui diagrammi di risposta armonica della FdT disturbo-uscita
Per soddisfare la specifica sulla attenuazione minima del disturbo, si dovrà
garantire che
Wdy j 0.01
Wdy j
dB
40db
[10,20]
[10,20]
2
2
s 1s 2
Wdy s
2k R
s 1s 2 2k R
1
s 1s 2
81
Wdy j
Bode Diagram
Magnitude (dB)
0
-50
kR=1
kR=10
kR=20
kR
kR=40
kR=60
kR=100
kR=1000
kR=2000
-100
Phase (deg)
0
-45
-90
-135
-180 -2
10
-1
10
0
10
1
10
2
10
3
10
Frequency (rad/sec)
Al crescere di kR aumenta l’attenuazione dei moduli e si allarga progressivamente
l’intervallo di frequenza in cui tale attenuazione è valida
82
clear all
P=tf(2,[1 3 2])
Codice Matab per realizzare il grafico della slide
precedente
kR=1;
Wdy_1=P/(1+kR*P)
kR=10;
Wdy_10=P/(1+kR*P)
kR=20;
Wdy_20=P/(1+kR*P)
kR=40;
Wdy_40=P/(1+kR*P)
kR=60;
Wdy_60=P/(1+kR*P)
kR=100;
Wdy_100=P/(1+kR*P)
kR=1000;
Wdy_1000=P/(1+kR*P)
kR=2000;
Wdy_2000=P/(1+kR*P)
bode(Wdy_1,Wdy_10,Wdy_20,Wdy_40,Wdy_60,Wdy_100,Wdy_1000,Wdy_2000),
legend('k_R=1','k_R=10','k_R=20','k_R=40','k_R=60','k_R=100','k_R=1000','k_R=2000')
83
P=@(s)(2./((s+1).*(s+2)))
kR=100;
Wdy=@(s)(P(s)./(1+kR*P(s)))
Codice Matab ad-hoc per
omega=10:0.01:20;
graficare il diagramma dei
mag100=20*log10(abs(Wdy(i*omega)));
kR=200;
moduli in dB della FdT disturbo
Wdy=@(s)(P(s)./(1+kR*P(s)))
uscita al variare di kR
omega=10:0.01:20;
mag200=20*log10(abs(Wdy(i*omega)));
kR=300;
Wdy=@(s)(P(s)./(1+kR*P(s)))
omega=10:0.01:20;
mag300=20*log10(abs(Wdy(i*omega)));
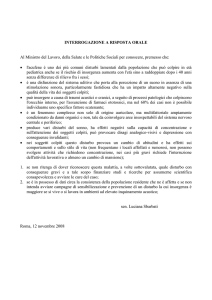
plot(omega,mag100,omega,mag200,omega,mag300),legend('kr=100','kr=200','kr=300'),grid
-25
kr=100
kr=200
kr=300
-30
kR=300 OK
-35
-40
-45
-50
10
11
12
13
14
15
16
17
18
19
20
84
Uscita con set-point nullo
Specifica S2 soddisfatta
85
Uscita complessiva
Uscita complessiva (zoom)
86
Uscita con set-point nullo e
guadagno del regolatore ridotto
(kR=100 anziche 300)
Attenuazione del disturbo
fuori specifica