NOTE SULLO SPAZIOTEMPO DI TOLMAN–BONDI–LEMAITRE
ROBERTO GIAMBÒ
I NDICE
1. Il tensore di Einstein in simmetria sferica
2. Lo spaziotempo di Tolman–Bondi–Lemaitre
2.1. Derivazione della soluzione
3. Studio delle singolarità dello spaziotempo di TBL
3.1. Raggi di luce nello spaziotempo di TBL
Appendice A. Geodetiche e pregeodetiche
Riferimenti bibliografici
1
2
2
6
7
12
13
In queste note verrà derivata e discussa la soluzione di Tolman–Bondi–Lemaitre alle equazioni di Einstein che rappresenta il collasso gravitazionale relativistico di una nuvola di
polvere. Per una introduzione divulgativa al tema del collasso gravitazionale si veda [2].
1. I L TENSORE DI E INSTEIN IN SIMMETRIA SFERICA
Consideriamo la generica metrica di uno spaziotempo a simmetria sferica:
(1)
g = −e2ν(t,r) dt2 + e2λ(t,r) dr2 + R2 (t, r) dΩ2 ,
in cui (t, r, θ, φ) sono le coordinate (dette comoving) sullo spaziotempo e dΩ2 = dθ2 +
sin2 θ dφ2 è la prima forma fondamentale della sfera S 2 immersa nello spazio euclideo R3 .
Allo scopo di scrivere le equazioni di Einstein abbiamo necessità di conoscere le componenti significative del tensore di Einstein G = Ric − 21 S g, dove Ric è il tensore di Ricci e S
la curvatura scalare della connessione di Levi–Civita indotta da g.
Data la particolare simmetria della metrica, le funzioni incognite dipendono solo dalle
coordinate (t, r) (e non da θ o φ). Useremo allora la convenzione
f0 =
∂f
,
∂r
∂f
f˙ =
∂t
per le derivate parziali. Introducendo quindi la funzione di massa di Misner–Sharp
R
R
1 − R02 e−2λ + Ṙ2 e−2ν ,
(2)
m(t, r) = (1 − g(∇R, ∇R)) =
2
2
Date: Versione del 8 aprile 2014.
1
2
R. GIAMBÒ
(dove ∇f è il gradiente di f indotto dalla metrica g), le componenti non nulle del tensore di
Einstein, visto come tensore di tipo (1, 1), in coordinate comoving, sono le seguenti:
2m0
2Ṙe−2ν 0
0
0
+
Ṙ
−
Ṙν
−
λ̇R
,
R0 R2
R0 R
2R0 e−2λ 0
2ṁ
−
Ṙ − Ṙν 0 − λ̇R0 ,
=−
ṘR2
ṘR
2e−2ν 0
=
Ṙ − Ṙν 0 − λ̇R0 ,
R
2e−2λ 0
=−
Ṙ − Ṙν 0 − λ̇R0 ,
R
1 −2λ 00
= Gφφ =
e [(ν + ν 02 − ν 0 λ0 )R + R00 + R0 ν 0 − R0 λ0 ]−
R
o
(3a)
Gtt = −
(3b)
Grr
(3c)
Gtr
(3d)
Grt
(3e)
Gθθ
(3f)
e−2ν [(λ̈ + λ̇2 − λ̇ν̇)R + R̈ + Ṙλ̇ − Ṙν̇] .
2. L O SPAZIOTEMPO DI T OLMAN –B ONDI –L EMAITRE
Lo spaziotempo di Tolman–Bondi–Lemaitre (TBL) è la soluzione delle equazioni di
Einstein
(4)
G = 8πT
dove T è il tensore di energia impulso rappresentante una nuvola sferica di particelle senza
interazioni reciproche [4]. Per questo motivo lo spaziotempo di TBL è anche chiamata
polvere sferica. L’espressione di T in coordinate comoving è data da
(5)
T = (t, r) e2ν(t,r) dt2 ,
dove (t, r) è una funzione da determinare, che fisicamente esprime la densità di energia
della polvere, ed è soggetta alla condizione
(6)
(t, r) > 0.
Dalla (5) si vede facilmente che l’unica componente non nulla di T , visto come tensore di
tipo (1, 1), è
(7)
Ttt = −(t, r).
Osservazione 2.1. Si noti che, dalla (5) e ricordando la metrica (1), T = U ⊗ U , dove
∂
U = e−ν ∂t
è un campo vettoriale di tipo tempo unitario (cioè tale che g(U, U ) = −1).
2.1. Derivazione della soluzione. Risolviamo quindi esplicitamente il sistema (4) nelle
incognite ν, λ, R e come funzioni di (t, r). Saranno necessarie alcune condizioni iniziali
al tempo t = 0, che verranno specificate lungo l’argomento che segue.
LO SPAZIOTEMPO DI TOLMAN–BONDI–LEMAITRE
3
Usando (3a)–(3c) si trovano le seguenti equazioni:
(8a)
m0 = 4πR2 R0 ,
(8b)
ṁ = 0,
(8c)
Ṙ0 = Ṙν 0 + λ̇R0 = 0,
mentre la quarta equazione che useremo è conseguenza dell’annullarsi della divergenza di
T:
µ
Tr;µ
= ν 0 = 0.
(8d)
Verifichiamo la (8d):
µ
µ
Tr;µ
= Tr,µ
− Γνµr Tνµ + Γµνµ Trν = −Ttt Γttr = Γttr ,
dove si è sfruttata la forma (5) del tensore T . A questo punto è facile verificare che Γttr =
1 tt
g gtt,r = ν 0 , ottenendo la (8d).
2
La (8b) dice che la massa è una funzione della sola variabile r:
m = F (r),
(9)
dove F (r) è una funzione arbitraria dipendente dalle condizioni iniziali e rappresenta la
massa (2) al tempo t = 0. Dalla (8d), supponendo vera la condizione (6), si ha invece ν 0 = 0
per cui ν = ν(t), ma a meno di riparametrizzare la coordinata t, considerando una nuova
coordinata T legata a t dalla relazione
dT
= eν(t) ,
dt
possiamo supporre eν(t) = 1, cioè
ν(t) ≡ 0.
(10)
A questo punto la (8c) diventa
(11)
Ṙ0
R0
= λ̇ che può essere integrata rispetto a t ottenendo
R0 = eg(r)+λ ,
con g(r) condizione iniziale. Infine, imponendo in (2) tutte le condizioni finora trovate, si
ottiene
R
F (r) =
1 + Ṙ2 − e2g(r)
2
da cui, risolvendo rispetto a Ṙ, si ha
(12)
Ṙ2 =
2F (r)
+ f (r),
R
dove si è posto
(13)
f (r) = e2g(r) − 1.
Risolvendo la (12) si determina R(t, r) da cui λ(t, r) usando la (11), ν(t, r) = 0 dalla (10),
ottenendo la metrica
(14)
g = −dt2 + e−2g(r) R0 (t, r)2 dr2 + R(t, r)2 dΩ2 .
4
R. GIAMBÒ
Infine, dalla (8a) si ha
F 0 (r)
.
4πR2 R0
ottenendo anche l’espressione per la densità di energia. Una volta scelta la condizione iniziale R(0, r), e la funzione f (r) (legata alla condizione iniziale Ṙ(0, r)), la soluzione è dunque
completamente determinata dalla funzione di massa F (r) misurata all’istante t = 0.
Per semplicità continuiamo prendendo in esame il caso particolare in cui si sceglie la
condizione iniziale f (r) = 0 (detto caso marginally bound) o, equivalentemente, g(r) = 0.
Inoltre fissiamo la condizione iniziale su R
(t, r) =
(15)
R(t, r) = r,
(16)
ed integriamo la (12), non prima di aver osservato che, poiché vogliamo studiare soluzioni
collassanti (vedi l’osservazione 2.2), saremo interessati alla radice negativa del membro di
destra della (12). Ricordando che ora f (r) = 0 integriamo quindi
r
2F (r)
Ṙ = −
R
rispetto a t, usando la condizione (16), ottenendo con qualche calcolo
3/2 !
2r3/2
R
(17)
t= p
1−
.
r
3 2F (r)
Introdotta per comodità la funzione k(t)
r
3 2F (r)
,
(18)
k(t) =
2
r3
la (17) si esprime rispetto ad R fornendo la soluzione
R(t, r) = r(1 − k(r)t)2/3 ,
(19)
dove k(r) è una condizione iniziale completamente determinata da F (r) tramite la (18). In
definitiva la metrica dello spaziotempo di TBL nel caso marginally bound è
(20)
g = −dt2 + R0 (t, r)2 dr2 + R(t, r)2 dΩ2 ,
ove R(t, r) è dato dalla (19).
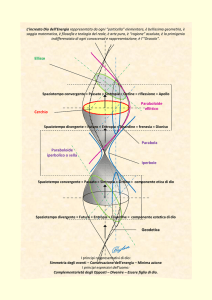
Osservazione 2.2. La soluzione appena trovata può essere intepretata come segue.
Sia r0 ∈ [0, rb ] con rb il raggio della stella all’istante inziale, misurato da un osservatore
solidale con la stella collassante. Etichettiamo con ’r0 ’ la materia che, all’istante iniziale, si
trova a distanza r0 dal centro di simmetria della stella. Questa materia costituisce quella che
è chiamata shell r0 . Allora la funzione
t 7→ R(t, r0 )
misura, al generico istante t > 0, il raggio della shell r0 (Figura 1). Poiché abbiamo scelto
di risolvere l’equazione (12) usando la radice negativa, sarà Ṙ ≤ 0, e dunque il raggio della
LO SPAZIOTEMPO DI TOLMAN–BONDI–LEMAITRE
R=
5
r0
RH
t= 0
t0,
r 0L
t =t0
F IGURA 1. La funzione R(t, r0 ) misura l’evoluzione del raggio della shell
di materia che, all’istante iniziale t = 0, si trova a distanza r0 dal centro di
simmetria della stella.
generica shell r0 decrescerà al crescere del tempo dell’osservatore solidale con la stella che
collassa.
La soluzione di polvere trovata è, come detto, completamente determinata dalla scelta
del dato iniziale F (r). Per semplicità supporremo di prendere F (r) ∈ C ∞ ([0, rb ]). Inoltre,
come condizioni di ragionevolezza fisica, supporremo la massa F (r) ≥ 0 e tale per cui l’energia iniziale (0, r) sia una funzione decrescente rispetto ad r, in modo tale da misurare
un’energia maggiore quanto più ci avviciniamo al centro di simmetria della stella. Poiché
però vogliamo considerare una situazione in cui la soluzione è regolare all’istante iniziale
di osservazione (come quella in cui, ad esempio, la stella comincia a collassare), supporremo che limr→0+ (0, r) ∈ R. Se l’energia divergesse nel centro all’istante iniziale infatti,
la soluzione sarebbe singolare già in t = 0, mentre vogliamo studiare l’evoluzione della
soluzione a partire da una situazione regolare.
Dall’equazione (15) e usando la (16) si ha
(0, r) =
F 0 (r)
,
4πr2
per cui, affinché limr→0+ (0, r) ∈ R deve essere
(21)
F (r) = F0 r3 + Fn r3+n + o(r3+n ),
con n > 0. Dovendo inoltre essere F (r) > 0 e
(22)
F0 > 0,
d
(0, r)
dr
Fn < 0.
< 0 si ottiene
6
R. GIAMBÒ
Queste condizioni su F , in virtù della (18), si traducono in condizioni sul polinomio di
McLaurin di k(r):
1/2
3p
3p
Fn n
n
n
n
(23) k(r) =
F0 + Fn r + o(r ) =
2F0 1 +
r + o(r )
2
2
F0
Fn n
3p
n
2F0 1 +
r + o(r ) = 1 − a rn + o(rn ),
=
2
2F0
√
dove per semplicità abbiamo posto 23 2F0 = 1 ed abbiamo introdotto il parametro positivo
Fn
a definito come a = − 2F
.
0
3. S TUDIO DELLE SINGOLARIT À DELLO SPAZIOTEMPO DI TBL
Ricordando le equazioni di Einstein (4), nel caso in questione in cui T è dato da (5) vediamo che un comportamento divergente di (t, r) è il segnale di un comportamento divergente
della curvatura e quindi di una singolarità. Tenendo in conto la (15) vediamo che condizione
necessaria per cui ciò accade è che
(1) R = 0, oppure
(2) R0 = 0.
Il primo caso corrisponde, ricordando la (19), ad r = 0 o a k(r)t = 1. Quando r = 0
possiamo calcolare la densità di energia, usando (15) e (19), ottenendo con qualche calcolo
2
(t, 0) = (1 − t)−2
3
per cui osserviamo che, fin quando t < 1, il centro di simmetria non presenta alcuna singolarità: {t < 1} × {0} è anche detto centro regolare. La singolarità nel caso r = 0 si forma
invece solo quando t = 1, che corrisponde alla situazione in cui k(r)t = 1. Dunque, la
curva
1
= 1 + arn + o(rn )
(25)
ts (r) : [0, rb ] → R, ts (r) =
k(r)
(24)
è il luogo dei punti in cui si forma la singolarità dovuta all’annullarsi di R (chiamata singolarità shell focusing), ed esprime il tempo comoving in cui la shell r collassa completamente.
Per completare l’analisi, occorre considerare anche il caso (2), cioè studiare quando R0 =
0. Con qualche conto si ottiene che
2 0
0
R = 0 ⇔ 1 − k(r) + rk (r) t = 0.
3
La curva che esprime il luogo di zeri di R0 è dunque
(26)
tsc : [0, rb ] → R,
tsc (r) =
1
k(r) + 32 rk 0 (r)
Con le ipotesi fatte su F (r) (e quindi su k(r)) però, possiamo supporre che k 0 (r) ≤ 0 e
quindi
(27)
tsc (r) ≥ ts (r), ∀r ∈ [0, rb ],
(= ⇔ r = 0).
LO SPAZIOTEMPO DI TOLMAN–BONDI–LEMAITRE
7
Questo significa che, fissata una shell r0 > 0, il tempo di formazione della singolarità di
tipo (2), detta shell–crossing, è superiore al tempo di collasso della shell r0 . Ma ovviamente
dopo che la singolarità si è formata non ha più senso fisico controllare che succede per
tempi comoving posteriori: la singolarità rappresenta un bordo dello spaziotempo, oltre il
quale la soluzione delle equazioni di Einstein non è prolungabile. Dunque, nel modello
di spaziotempo che stiamo considerando, il collasso genera sempre una singolarità di tipo
shell–focusing (1).
3.1. Raggi di luce nello spaziotempo di TBL. Analogamente a quanto accade in altri casi
(es. lo spaziotempo di Schwarzschild) lo studio del moto delle particelle libere permette di ricavare informazioni sul cosiddetto comportamento causale dello spaziotempo, e ad
esempio capire se la singolarità descritta dalla curva ts (r) è ben nascosta all’interno di una
regione intrappolata. A tal scopo occorre definire l’orizzonte apparente che, in maniera analoga all’orizzonte degli eventi per la soluzione di Schwarzschild, è definito dal luogo dei
punti in cui il gradiente di R(t, r) è di tipo luce e quindi, ricordando la (2), l’equazione che
lo definisce è R(t, r) = 2m(t, r) da cui, usando (9), (18) e (19) si ottiene l’equazione
4
(1 − k(r)t)2/3 = k 2 r2 ,
9
e quindi possiamo esplicitare t in funzione di r ottenendo la curva th (r) che definisce
l’orizzonte apparente:
1
8
8
3 3
(29)
th (r) =
1 − k(r) r = ts (r) − k(r)2 r3 ,
k(r)
27
27
(28)
e dunque sarà th (r) < ts (r) per r > 0, e th (0) = ts (0). Usando lo sviluppo di k(r) troviamo
lo sviluppo di th (r) che dipenderà dall’n introdotto nella (21) come segue:
n
n
n = 1, 2
1 + ar + o(r ),
8
(30)
th (r) = 1 + a − 27
r3 + o(r3 ), n = 3
8 3
1 − 27
r + o(r3 ),
n > 3.
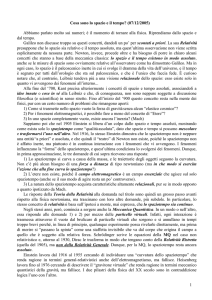
Usando la stessa notazione vista nel caso di Schwarzschild, denotiamo rispettivamente con
I e II le regioni dello spaziotempo definite dalle disequazioni R < 2m e R > 2m, e dunque
(vedi Figura 2)
(31a)
I = {(t, r) : r ∈ [0, rb ], th (r) < t < ts (r)},
(31b)
II = {(t, r) : r ∈ [0, rb ], t < th (r)}.
Osservazione 3.1. Si osservi che, per quanto detto, la metrica di TBL (20) ha senso fisico
nell’insieme
I ∪ II ∪ {(th (r), r) : r ∈]0, rb ]} = {(t, r) : r ∈ [0, rb ], t < ts (r)}.
Questo significa che occorre “incollare” una metrica sul bordo della stella Σ = {(t, rb )}
che descriva il campo gravitazionale all’esterno della stella di polvere collassante. Si può
dimostrare che la metrica di Schwarzschild può assolvere questo compito, in modo tale che
8
R. GIAMBÒ
t
II
ts H rL
th H rL
1
I
rb
r
F IGURA 2. Lo spaziotempo di TBL. Oltre la curva ts (r) la soluzione non è prolungabile.
le prime forme fondamentali che le due metriche inducono sulla superficie di incollamento
Σ coincidono, ed analogamente per le due seconde forme fondamentali.
Studiamo ora l’andamento delle geodetiche nello spaziotempo di TBL, concentrandoci
per semplicità sulle geodetiche di tipo luce radiali. Sia γ(τ ) = (t(τ ), r(τ ), θ(τ ), φ(τ )) una
∂
è un campo di Killing e
curva sullo spaziotempo. Poiché la metrica non dipende da φ, ∂φ
2
dunque R2 sin2 θ dφ
= L è costante lungo il moto. Scegliamo allora L = 0, da cui si
dτ
ottiene (a meno di rotazioni) che dφ
= 0 e quindi φ(τ ) = φ0 costante. Sfruttando questa
dτ
informazione l’equazione delle geodetiche per θ(τ ) si semplifica come segue
dr
dt
R0 dτ
+ Ṙ dτ
dθ
+
= 0,
dτ
R
dθ
che è soddisfatta quando dτ
= 0, da cui θ(τ ) = θ0 costante.
A questo punto, un’importante considerazione è che le curve di tipo luce
d2 θ
dτ 2
γ(τ ) = (t(τ ), r(τ ), θ0 , φ0 )
con θ0 , φ0 costanti sono sempre delle pregeodetiche, cioè esiste una riparametrizzazione
s = s(τ ) che le rende geodetiche, vedi l’appendice A. Poiché in effetti siamo interessati
al supporto di queste curve, ed in particolare alla proiezione di questo supporto sul piano
(t, r), questo significa che possiamo accontentarci di studiare l’equazione di queste curve
in cui esprimiamo t come funzione di r. Usando l’espressione della metrica (20) si ha
quindi che le pregeodetiche radiali nulle viste come curve t = t(r) soddisfano la condizione
dt 2
= R02 . Ricordando che R0 ≥ 0 nel modello che stiamo analizzando, studiamo allora
dr
le soluzioni dell’equazione
dt(r)
= R0 (t(r), r),
dr
essendo interessati ai raggi di luce che, al crescere di t (future pointing) si allontanano dalla
stella (outgoing).
Per determinare il comportamento di queste curve stabiliamo ora una proprietà notevole
dell’orizzonte apparente che ci sarà utile fra poco. Questa proprietà è legata allo studio
(32)
LO SPAZIOTEMPO DI TOLMAN–BONDI–LEMAITRE
9
qualitativo delle soluzioni di equazioni differenziali ordinarie (si veda [1]), i cui risultati
teorici saranno utili nel seguito.
Lemma 3.2. L’orizzonte apparente th (r) è una sottosoluzione dell’equazione (32) in un
opportuno intorno destro di r = 0:
∃r1 > 0 : t0h (r) < R0 (th (r), r), ∀r ∈]0, r1 ].
(33)
Dimostrazione. Usando la (29) si ha
dth (r)
k 0 (r)
8
16
0
3
=−
k(r)k
(r)r
−
k(r)2 r2 ,
−
dr
k(r)2 27
9
mentre con qualche calcolo, usando anche la (19) si ha
k 0 (r)
4
8
R (th (r), r) = −
+ k(r)k 0 (r)r3 + k(r)2 r2 ,
2
k(r)
27
9
0
e quindi
dth (r)
4
2k 0 (r)r
0
2 2
− R (th (r), r) = − k(r) r 1 +
,
dr
3
3k(r)
che è negativa in un intorno destro di r = 0.
In virtù del lemma appena visto, a meno di cambiare il bordo della stella possiamo supporre che l’orizzonte sia una sottosoluzione di (32) su tutto [0, rb ]. Questo significa che,
se consideriamo un raggio di luce emesso nella regione II, cioè una soluzione di (32) con
la condizione iniziale (t0 , r0 ) ∈ II, per i teoremi del confronto sulle equazioni differenziali
ordinarie esso dovrà necessariamente rimanere nella regione II, ∀r > r0 : segnali luminosi
emessi all’interno della regione II non possono oltrepassare l’orizzonte apparente.
Fin qui la situazione sembra del tutto simile a quanto accade con la soluzione di Schwarzschild. In effetti una differenza c’è, ed è il fatto che stavolta orizzonte e singolarità
coincidono nel centro: th (0) = ts (0) = 1. In principio quindi, esiste la possibilità che un
raggio di luce possa essere emesso dal punto singolare (0, 1) e sfuggire all’orizzonte entrando nella regione I. Per scoprire se questo accade, occorrerebbe studiare qualitativamente il
problema di Cauchy
dt(r) = R0 (t(r), r),
dr
.
t(0) = 1.
Purtroppo però questo problema non soddisfa le classiche condizioni di regolarità che ci
potrebbero permettere di applicare i teoremi noti dalla teoria delle equazioni differenziali
ordinarie (si noti che R0 (t, r) non è nemmeno definito nella condizione iniziale (0, 1)). Il
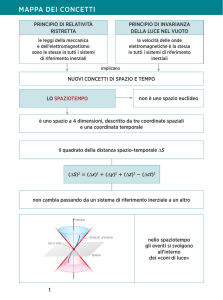
problema da studiare va dunque riformulato come segue: studiare l’esistenza di curve tg (r)
soluzioni di (32), tali che
(34)
tg (r) < th (r), ∀r ∈]0, r0 ],
e lim+ tg (r) = 1.
r→0
Se curve siffatte non esistono, allora la curva singolare non può in alcun modo emettere
segnali luminosi che sfuggano alla regione II: diciamo quindi che la singolarità è coperta
dall’orizzonte e la regione II è effettivamente una regione intrappolata. Se, invece, riusciamo
10
R. GIAMBÒ
H r0, t0 L
th H rL
tg H rL
1
F IGURA 3. Se esiste una soprasoluzione di (32) tg (r) sotto l’orizzonte, allora
esiste anche una soluzione, che si prolunga fino al punto (0, 1).
a trovare tali curve, significa che la singolarità, almeno nel centro di simmetria della stella,
può comunicare con la regione esterna I: diciamo che la singolarità è (localmente) nuda.
Studiamo allora il problema dell’esistenza di raggi di luce emessi dalla singolarità centrale
(0, 1) verso la regione II. Cominciamo dai casi in cui sicuramente la risposta è negativa.
Proposizione 3.3. Se n > 3 oppure n = 3 e a <
soddisfacenti la proprietà (34).
8
,
27
non esistono soluzioni di (32)
Dimostrazione. Nei casi in questione, osservando la (30), la curva th (r) è decrescente in
un intorno destro di r = 0, mentre una qualunque soluzione dell’equazione (32) che è
prolungabile per continuità fino a r = 0, t = 1, deve essere crescente in quanto R0 ≥ 0,
quindi è maggiore di th (r) e dunque è contenuta nella regione II.
Per studiare gli altri casi ci sarà utile il seguente lemma.
Lemma 3.4. Supponiamo che esista t∗ (r) : [0, r∗ ] → R, con r∗ opportuno, tale che t∗ (0) =
1 ed inoltre, in ]0, r∗ ], t∗ (r) sia una soprasoluzione dell’equazione (32) tale che t∗ (r) <
th (r). Allora esistono infinite soluzioni di (32) che verificano la proprietà (34).
Dimostrazione. Supponiamo che esista una t∗ (r) come nelle ipotesi, e consideriamo il problema di Cauchy
dt(r) = R0 (t(r), r),
dr
t(r0 ) = t0 ,
dove 0 < r0 < r∗ e t0 < th (r0 ). Questo problema ammette un’unica soluzione locale
tg (r) in quanto la funzione R0 (t, r) è regolare in un intorno del punto (t0 , r0 ), e dunque
tale soluzione può essere prolungata all’indietro, senza poter intersecare th (r) dal basso o
t∗ (r) dall’alto in virtù dei teoremi di confronto per equazioni differenziali ordinarie. Dunque può essere prolungata fino ad r = 0, dove per il teorema dei due carabinieri deve essere
limr→0+ tg (r) = 1. Ovviamente, variando la condizione iniziale (r0 , t0 ) nella regione compresa tra th (r) e t∗ (r), è possibile determinare infinite soluzioni che terminano nel punto
(1, 0).
Vediamo cosa succede negli altri casi ancora senza risposta.
LO SPAZIOTEMPO DI TOLMAN–BONDI–LEMAITRE
Proposizione 3.5. Se n = 1, 2, oppure n = 3 e a > ac :=
dell’equazione (32) soddisfacenti la proprietà (34).
11
√
2(26+15 3)
27
esistono soluzioni
Dimostrazione. Nei casi in questione proveremo che esistono, in un intorno destro di r =
0, soprasoluzioni dell’equazione (32) come nelle ipotesi del Lemma 3.4, che ci assicurerà
quindi la tesi. Tenendo a mente la (30), cercheremo soprasoluzioni del tipo t∗ (r) = 1 + xrn ,
8
dove 0 < x < a se n = 1, 2, e 0 < x < (a − 27
) se n = 3. Ovviamente è
dt∗
= nxrn−1 ,
dr
(35)
mentre con qualche calcolo si trova
2
n
3
+ 1 a − x rn + o(rn )
.
(a − x)1/3 rn/3 + o(rn/3 )
0
R (t∗ (r), r) =
(36)
2
2
Nei casi n = 1 o n = 2, allora, è R0 (t∗ (r), r) = µr 3 n + o(r 3 n ), e per qualsiasi scelta di
2
x ∈]0, a[, µ è positivo. In questo modo sarà senz’altro nxrn−1 > µr 3 n in un intorno destro
di r = 0 e quindi esistono soprasoluzioni come nelle ipotesi del Lemma 3.4.
Il caso n = 3 è un po’ più delicato, in quanto (35) e (36) ci dicono che la disequazione
0
t∗ > R0 (t∗ , r) equivale, in un intorno destro di r = 0, alla seguente:
3x >
(37)
3a − x
.
(a − x)1/3
Il problema a questo punto è quindi puramente algebrico: determinare se esistono degli
8
x ∈]0, (a − 27
)[ soddisfacenti la disequazione (37), che è equivalente a
"
3 #
1
a
(38)
(3x)3 (a − x) −
−
> 0.
x 3
Poniamo y =
a
x
− 31 , da cui si trova x =
3a
,
3y+1
a−
da cui
a
e quindi la (38) equivale a
3a
> y3
3y + 1
3y − 2
> y3,
3y + 1
e quindi
(39)
a > y3
3y + 1
,
3y − 2
8
dove nell’ultimo passaggio abbiamo usato il fatto che il vincolo 0 < x < a − 27
assicura che
3y + 1 e 3y − 2 siano entrambi positivi. Quindi il problema ora è determinare se esistono
degli y > 32 tali che (39) vale.
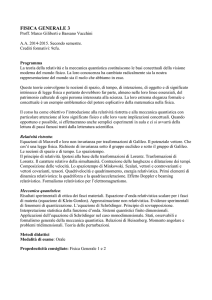
3y+1
Dallo studio della funzione Q(y) = y 3 3y−2
(vedi Figura 4) si trova che ciò è possibi√ 1
le quando a > Q(yc ), dove yc = 3 1 +√ 3 è il minimo locale di Q(y) nell’intervallo
]2/3, +∞[. Poiché si ha Q(yc ) =
caso n = 3.
2(26+15 3)
27
= ac , la proposizione è dimostrata anche nel
12
R. GIAMBÒ
a
ac
23
y
yc
F IGURA 4. Il grafico della funzione Q(y) usata nella dimostrazione della
Proposizione 3.5.
Dalla Proposizione 3.5 possiamo allora dedurre la seguente conclusione:
Teorema 3.6. La soluzione di TBL marginally bound (20), con R(t, r) data da (19) e completamente determinata
da k(r) (23), ha la singolarità centrale nuda nei casi n = 1, 2, ed
√
2(26+15 3)
n = 3 con a >
.
27
Osservazione 3.7. Come caso limite, esaminiamo brevemente cosa succede quando la massa
è esattamente un polinomio di grado 3, e quindi
F (r) = F0 r3 .
√
In tal caso, ponendo come fatto prima 32 2F0 = 1 per semplicità, si ottiene k(r) = 1
da cui R(t, r) = r(1 − t)2/3 . Quindi la curva della singolarità è costante: ts (r) ≡ 1,
8 3
r . Analogamente a quanto visto nel
mentre ricordando la (29), l’orizzonte è th (r) = 1 − 27
caso della Proposizione 3.3, la singolarità è completamente coperta all’interno della regione
intrappolata.
Questo spaziotempo, in cui tutte le shell collassano al medesimo tempo, è detta soluzione
omogenea di Oppenheimer–Snyder. È facile rendersi conto che, essendo
g = −dt2 + (1 − t)4/3 dr2 + (1 − t)4/3 r2 dΩ2 = −dt2 + (1 − t)4/3 (dx2 + dy 2 + dz 2 ),
si ottiene (almeno formalmente) la metrica di uno dei modelli cosmologici di Friedmann.
A PPENDICE A. G EODETICHE E PREGEODETICHE
In questa appendice esaminiamo alcuni utili risultati (cfr. [3, p. 69 ed eserc. 19 a p. 95]
che ci hanno permesso di studiare le geodetiche di tipo luce radiali (vedi in particolare il
paragrafo 3.1). In particolare, vogliamo dimostrare la seguente proposizione
Proposizione A.1. Sia (M, g) una varietà lorentziana di dimensione 2, e γ(τ ) una curva su
M di tipo luce. Allora γ è una pregeodetica, cioè esiste una riparametrizzazione τ = τ (s)
tale che s 7→ γ(τ (s)) è una geodetica.
LO SPAZIOTEMPO DI TOLMAN–BONDI–LEMAITRE
13
Una volta dimostrata questa proposizione, il seguente corollario sugli spazitempo a simmetria sferica segue immediatamente.
Corollario A.2. Sia (M, g) uno spaziotempo a simmetria sferica, e γ una curva radiale
nulla su M , allora γ è una pregeodetica.
Dimostrazione. Basta osservare che una curva radiale nulla su M è una curva nulla sullo
spaziotempo R × R+ con la metrica g = −e2ν(t,r) dt2 + e2λ(t,r) dr2 .
Per dimostrare la proposizione A.1 occorrono un paio di lemmi preparatori.
Lemma A.3. Sia (M, g) una varietà lorentziana di dimensione n ≥ 2 e γ(τ ) una curva
d
d
tale che velocità e accelerazione siano collineari: dτ
γ(τ ) k ∇ d γ dτ
γ. Allora γ è una
dτ
pregeodetica.
d
d
Dimostrazione. Sia f (τ ) la funzione tale che ∇ d γ dτ
γ = f (τ ) dτ
γ. Sia τ = τ (s) una
dτ
generica riparametrizzazione della curva. Allora
dτ d
d
γ=
γ
ds
ds dτ
e
2
dτ
d
dτ d
d2 τ d
d
∇dγ γ =∇dγ
γ
= 2
γ +
∇dγ γ=
ds ds
ds
dτ
ds dτ
ds
dτ
ds
dτ
"
2 #
2
dτ
dτ
d2 τ d
d
d2 τ
d
γ +
+ f (τ )
γ,
f (τ ) γ =
2
2
ds
dτ
ds
dτ
ds
ds
dτ
da cui si deduce che la parametrizzazione, che rende γ geodetica τ (s), risolve l’equazione
d2 τ
dτ 2
= 0.
+
f
(τ
)
2
ds
ds
Lemma A.4. Sia (M, g) una varietà lorentziana con dim M = 2, p ∈ M e v ∈ Tp M
vettore di tipo luce, v 6= 0. Allora v ⊥ = {w ∈ Tp M : g(v, w) = 0} e hvi = {λv : λ ∈ R}
coincidono.
Dimostrazione. Poiché v è di tipo luce, g(v, v) = 0 e quindi v ∈ v ⊥ , perciò hvi ⊆ v ⊥ da
cui dim v ⊥ ≥ 1. Ma se dim v ⊥ = 2 allora g(v, w) = 0, ∀w ∈ Tp M , e dunque g sarebbe
degenere. Quindi dim v ⊥ = 1 e i due sottospazi coincidono.
d
d
Dimostrazione della prop. A.1. Derivando l’equazione g( dτ
γ, dτ
γ) = 0 lungo la curva γ(τ )
⊥
d
d
d
d
si ha g(∇ d γ dτ
γ, dτ
γ) = 0 e quindi ∇ d γ dτ
γ ∈ dτ
γ . Dal lemma A.4 si ha che
dτ
dτ
d
d
∇ d γ dτ γ ∈ h dτ γi, e perciò γ(τ ) è una pregeodetica grazie al lemma A.3.
dτ
R IFERIMENTI BIBLIOGRAFICI
[1] RG, note su Equazioni Differenziali Ordinarie (dispense integrative), http://docenti.unicam.it.
[2] RG e G Magli, Buchi neri e singolarità nude, Bollettino dell’Unione Matematica Italiana, VIII-A (2005),
37–50, online sul sito del Polimi
[3] B O’Neill, Semi-Riemannian Geometry with applications to Relativity, Academic Press
[4] B F Schutz, A First Course in General Relativity, Cambridge University Press