Capitolo 10
Calcolo integrale per funzioni di una variabile
10.1
Funzioni primitive
Abbiamo studiato il problema di dedurre da una data funzione la sua derivata. Vogliamo
ora occuparci del problema inverso: data una funzione f (x) in un certo intervallo A, definire
in A un’altra funzione F (x) che abbia per derivata la f (x), vale a dire:
F 0 (x) = f (x).
(10.1)
Se esistono funzioni F (x) che verificano la (10.1), esse si chiamano funzioni primitive della
f (x).
10.1.I Se la funzione f (x) ammette, nell’intervallo A, una funzione primitiva F (x), allora
ne ammette infinite, che si ottengono tutte aggiungendo alla F (x) una costante arbitraria c.
10.1.II Se la funzione f (x) ammette in A delle primitive, fra queste ne esiste una e una
sola che, in un prefissato punto a ∈ A, assuma un valore u assegnato ad arbitrio.
Si tratta ora di studiare sotto quali condizioni per la f (x) la (10.1) ammetta una soluzione
F (x) e, in caso affermativo, di darne un procedimento di calcolo. Questo problema, che
affrontato in tutta la sua generalità comporta difficoltà assai elevate, sarà studiato qui nel
caso particolare in cui la funzione f (x) sia continua. Con tale ipotesi si arriva a dimostrare
l’esistenza delle primitive, dando in pari tempo un metodo per calcolarle. Ciò è fondato sul
concetto di integrale.
10.2
Integrale di una funzione continua esteso ad un intervallo
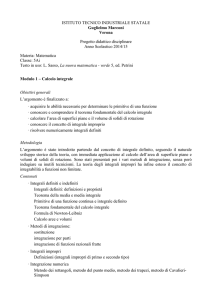
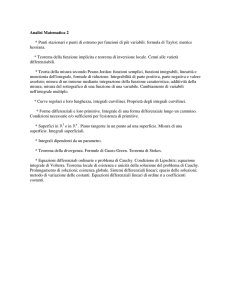
Sia f (x) una funzione continua in un intervallo A. Fissato un intervallo [a, b] ⊆ A, si opera
una decomposizione D di [a, b] in un numero arbitrario n di intervalli parziali [x0 , x1 ], [x1 , x2 ],
. . . [xn−2 , xn−1 ], [xn−1 , xn ] mediante i punti x1 , x2 , . . . , xn−1 scelti sotto la sola condizione
che risulti
a = x0 < x1 < x2 < . . . < xn−1 < xn = b.
Posto δ = max(x1 − x0 , x2 − x1 , . . . , xn−1 − xn ), tale numero positivo δ 6 b − a sarà chiamato
la norma della composizione D. Esistono, evidentemente, infinite decomposizioni D aventi
una norma assegnata δ < b − a.
Si fissino ora ad arbitrio un punto ξ0 ∈ [x0 , x1 ], un punto ξ1 ∈ [x1 , x2 ], . . . , un punto
95
Capitolo 10. Calcolo integrale per funzioni di una variabile
ξ0
ξn−1
ξ1
... ... ... ... ... ... ... ...
r
a ≡ x0
r
x1
r
r
x2 . . . . . . . . . . . . xn−1
r
xn ≡ b
Figura 10.1: Decomposizione dell’intervallo [a, b] e scelta dei punti per il calcolo della somma
integrale σ nella (10.2).
ξn−1 ∈ [xn−1 , xn ], come mostrato in figura 10.2, e si calcoli la somma
σ=
n−1
X
(xi+1 − xi )f (ξi )
(10.2)
i=0
che sarà chiamata somma integrale relativa alla f (x) ed all’intervallo [a, b].
Conviene osservare due modi particolari di scegliere i punti ξi . In ciascuno degli intervalli [xi , xi+1 ] la f (x) è dotata di minimo assoluto mi e di massimo assoluto Mi e si può
scegliere in ciascun [xi , xi+1 ] il punto xi nel punto (o in uno dei punti) ove la f (x) assume il
corrispondente minimo valore mi oppure il corrispondente massimo valore Mi . Cosı̀ facendo
si ottengono le due seguenti particolari somme integrali
n−1
X
s=
(xi+1 − xi )mi ,
n−1
X
S=
(xi+1 − xi )Mi ;
i=0
(10.3)
i=0
confrontandole con la generica somma (10.2) è evidente che in corrispondenza della medesima
decomposizione D di [a, b] risulta
s 6 σ 6 S.
(10.4)
Le somme integrali s, S dipendono soltanto dalla decomposizione D, mentre una generica
σ dipende, oltre che dalla D, anche dalla scelta dei punti ξi . Non si può dire che tali somme
siano funzioni della norma δ della decomposizione D perché, come si è già osservato, esistono
infinite decomposizioni D con la medesima norma e quindi ad un fissato δ corrispondono in
generale infiniti valori della somma integrale σ (ed, in particolare, della s e della S). Si può
però dire che la σ è una funzione ad infiniti valori della variabile δ, definita al variare di δ
nell’intervallo [0, b − a], il quale ha il punto 0 come punto di accumulazione.
La definizione di limite, data per funzioni ad un sol valore, si può immediatamente
estendere a funzioni a più valori dicendo che, se f (x) è una funzione a più (eventualmente
infiniti) valori, definita in un insieme E avente x0 come punto di accumulazione, la scrittura
lim f (x) = l
x→x
0
significa che, fissato ε > 0, esiste un δε > 0 tale che, per ogni punto x ∈ E che verifichi la
0 < |x − x0 | < δε , tutti i corrispondenti valori f (x) verificano la |f (x) − l| < ε.
Adottando questa estensione del concetto di limite, si dimostra il seguente risultato.
96
10.3. Significato geometrico dell’integrale
10.2.I Al tendere a zero della norma δ della decomposizione D, la somma integrale σ tende
ad un limite determinato e finito l, nel senso che, ∀ε > 0, ∃ δε > 0 tale che, in corrispondenza
ad ogni decomposizione D avente norma δ < δε , risulta sempre |σ − l| < ε.
Il limite l di cui il 10.2.I assicura l’esistenza è un numero che dipende dalla funzione
continua f (x) e dall’intervallo [a, b]; esso si chiama l’integrale della funzione f (x) esteso
all’intervallo [a, b] e si indica con la notazione
Z b
f (x) dx.
(10.5)
a
Si ha dunque per definizione (e col solito significato dei simboli)
Z
b
n−1
X
(xi+1 − xi )f (ξi )
f (x) dx = lim σ = lim
δ→0
a
δ→0
(10.6)
i=0
ed in particolare
Z
a
b
Z
n−1
X
(xi+1 −xi )mi ,
f (x) dx = lim s = lim
δ→0
δ→0
b
f (x) dx = lim S = lim
a
i=0
δ→0
δ→0
n−1
X
i=0
(xi+1 −xi )Mi .
Poiché l’integrale (10.5) coincide con il numero di separazione delle due classi {s}, {S}
considerate in precedenza, si può aggiungere:
10.2.II l’integrale della funzione f (x) esteso all’intervallo [a, b] coincide con l’estremo superiore dell’insieme costituito da tutte le possibili somme s e con l’estremo inferiore dell’insieme
costituito da tutte le possibili somme S. Pertanto le somme s danno valori approssimati per
difetto dell’integrale, le somme S ne danno valori approssimati per eccesso.
Circa il calcolo effettivo dell’integrale (10.5) possiamo dire per ora che, in ogni caso, se
ne possono ottenere valori comunque approssimati per mezzo delle somme integrali σ, s, S
calcolate in corrispondenza a decomposizioni di [a, b] in intervalli parziali molto piccoli. Dallo
sviluppo della teoria risulteranno però altri metodi più rapidi.
10.3
Significato geometrico dell’integrale
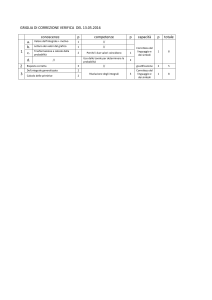
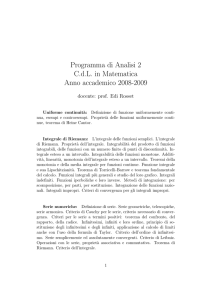
All’integrale di una funzione continua f (x) esteso ad un intervallo [a, b] si può dare un
notevole significato geometrico quando si supponga che nell’intervallo [a, b] si abbia sempre
f (x) > 0. Costruito il grafico della funzione (situato nel semipiano y > 0), si può considerare
l’insieme piano T = {(x, y)| a 6 x 6 b, 0 6 y 6 f (x)}, cioè la regione limitata dall’asse x,
dalla curva y = f (x) e dalle rette x = a, x = b (figura 10.2). Essa sarà chiamata rettangoloide
avente per base l’intervallo [a, b] e relativo alla funzione f (x).
97
Capitolo 10. Calcolo integrale per funzioni di una variabile
y
y = f (x)
T
a
b
x
Figura 10.2: Area individuata dal grafico della funzione y = f (x).
Allo scopo di definire in modo preciso che cosa debba intendersi per area del rettangoloide
T , si effettua una decomposizione D di [a, b] e si calcolano le somme s, S considerate in
precedenza:
s = (x1 − x0 ) m0 + (x2 − x1 ) m1 + . . . + (xn − xn−1 ) mn−1 ,
S = (x1 − x0 ) M0 + (x2 − x1 ) M1 + . . . + (xn − xn−1 ) Mn−1 ,
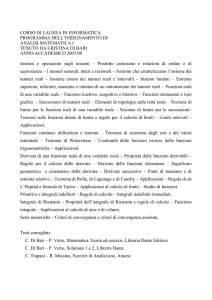
che ora sono certamente non negative. L’espressione s rappresenta la somma delle aree
dei rettangoli r0 , r1 , . . . , rn−1 che ricoprono una regione T 0 contenuta nel rettangoloide T ,
detta scaloide inscritto in T , mentre la S rappresenta la somma delle aree dei rettangoli
R0 , R1 , . . . , Rn−1 che ricoprono una regione T 00 contenente il rettangoloide T , detta scaloide
circoscritto a T (figura 10.3). Volendo allora definire l’area di T , conviene fare in modo che
essa risulti maggiore di s e minore di S e ciò, non soltanto per una particolare decomposizione
D di [a, b], ma per tutte le possibili decomposizioni. Questa considerazione conduce a definire
l’area di T come il numero di separazione tra le due classi contigue {s},{S}. Ma si sa che
Rb
tale numero di separazione è proprio l’integrale a f (x) dx e perciò si può concludere col
seguente enunciato:
10.3.I L’area del rettangoloide T definita come numero di separazione tra le classi contigue
costituite dalle aree degli scaloidi inscritti e dalle aree degli scaloidi circoscritti, è uguale
all’integrale della f (x) (continua e non negativa) esteso all’intervallo [a, b].
R0
r0
a = x0
x1
r3
r2
r1
x2
x3
x4 = b
a = x0
x1
R3
R2
R1
x2
x3
x4 = b
Figura 10.3: Aree dello scaloide inscritto (a sinistra) e di quello circoscritto (a destra) al
rettangoloide T .
98
10.4. Proprietà dell’integrale
10.4
Proprietà dell’integrale
Esponiamo ora le proprietà fondamentali dell’integrale di una funzione continua f (x), esteso
ad un intervallo [a, b].
Osserviamo anzitutto che se è f (x) = c (costante) in [a, b], si ha
σ=
n−1
X
i=0
(xi+1 − xi ) c = c
n−1
X
i=0
(xi+1 − xi ) = c (b − a).
Le somme integrali hanno il valore fisso c (b − a) e perciò il loro limite per δ → 0, cioè
l’integrale, avrà quel medesimo valore; dunque
Z b
c dx = c (b − a).
(10.7)
a
10.4.I (Teorema della media) Siano f (x), g(x) ∈ C 0 [a, b] e sia sempre g(x) > 0. Allora, detti m, M il minimo ed il massimo valore di f (x) in [a, b], si ha:
Z b
Z b
Z b
m
g(x) dx 6
f (x)g(x) dx 6 M
g(x) dx
(10.8)
a
a
a
ed esiste almeno un punto ξ ∈ [a, b] tale da aversi
Z b
Z
f (x)g(x) dx = f (ξ)
a
b
g(x) dx.
(10.9)
a
Nel caso particolare g(x) = 1, il teorema della media diventa
10.4.II Detti m, M il minimo ed il massimo valore di f (x) in [a, b], si ha:
Z b
f (x) dx 6 M (b − a)
m(b − a) 6
(10.10)
a
ed esiste almeno un punto ξ ∈ [a, b] tale da aversi
Z b
f (x) dx = (b − a)f (ξ).
(10.11)
a
Se f (x) > 0 la (10.11) ha la seguente interpretazione geometrica: il rettangoloide T di
base [a, b] e relativo alla f (x) ha la medesima area del rettangolo che ha la stessa base ed
altezza f (ξ). Ciò suggerisce di chiamare f (ξ) il valore medio della funzione f (x) nell’intervallo
[a, b].
Questa definizione si adotta in ogni caso (anche se non è sempre f (x) > 0), si pone cioè
Z b
1
valore medio di f (x) in [a, b] =
f (x) dx.
(10.12)
b−a a
99
Capitolo 10. Calcolo integrale per funzioni di una variabile
10.4.III (Teorema dell’additività) Se c è un punto interno all’intervallo [a, b], si ha:
Z
b
f (x) dx =
a
Z
c
f (x) dx +
a
Z
b
f (x) dx.
(10.13)
c
10.4.IV (Teorema della distributività) Se f1 (x), f2 (x), . . . , fn (x) sono funzioni continue in [a, b], allora, comunque si assegnino le costanti c1 , c2 , . . . , cn , si ha:
Z
b
a
n
X
ci fi (x) dx =
i=1
n
X
ci
i=1
Z
b
a
fi (x) dx.
(10.14)
Da questo teorema segue in particolare che l’integrale della somma di due o più funzioni
è uguale alla somma degli integrali delle singole funzioni: segue inoltre, ponendo uguali a
zero tutte le funzioni tranne una e ricordando la (10.7):
Z
b
Z
c f (x) dx = c
a
b
f (x) dx
(10.15)
a
ossia che un fattore costante si può portare fuori dal segno di integrale.
Aggiungiamo altri tre teoremi di cui il primo risulta ben evidente quando si pensi al
significato geometrico dell’integrale.
10.4.V Se in [a, b] risulta f (x) > 0, si ha
Z
b
f (x) dx > 0
(10.16)
a
ed inoltre, se [α, β] è un qualsiasi intervallo contenuto in [a, b]:
Z
b
f (x) dx >
a
Z
β
f (x) dx.
(10.17)
α
Nella (10.16) vale il segno di uguaglianza soltanto se f (x) è identicamente nulla in [a, b];
nella (10.17) soltanto se f (x) è identicamente nulla in [a, b] − [α, β].
10.4.VI Se f (x), g(x) ∈ C 0 [a, b] e si ha f (x) > g(x), risulta
Z
b
a
f (x) dx >
Z
b
g(x) dx
(10.18)
a
il segno di uguaglianza valendo nel solo caso che sia identicamente f (x) = g(x).
10.4.VII Sussiste la disuguaglianza
Z b
Z
6
f
(x)
dx
a
100
b
a
|f (x)| dx.
(10.19)
10.4. Proprietà dell’integrale
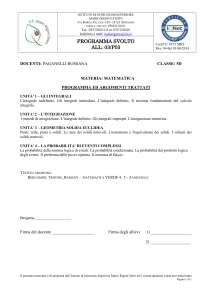
Abbiamo mostrato in precedenza il significato geometrico dell’integrale, supponendo
f (x) > 0. Se fosse f (x) 6 0, poiché la (10.15) ci permette di scrivere
Z b
Z b
[−f (x)] dx,
[con − f (x) > 0]
f (x) dx = −
a
a
è chiaro che l’integrale viene a rappresentare l’area del rettangoloide T di figura 10.4 cambiata
di segno.
y
a
b
x
T
y = f (x)
Figura 10.4: Area individuata dal grafico della funzione y = f (x), con f (x) < 0 in [a, b].
Supponiamo ora che la f (x) cambi di segno un numero finito di volte nell’intervallo [a, b],
riferendoci per esempio alla figura 10.5.
y
y = f (x)
T1
T3
a
b
T2
x
T4
Figura 10.5: Area individuata dal grafico della funzione y = f (x), che cambia segno in [a, b].
Possiamo scrivere per il 10.4.III:
Z b
Z α
Z
f (x) dx =
f (x) dx +
a
a
β
f (x) dx +
α
Z
β
101
γ
f (x) dx +
Z
γ
b
f (x) dx
Capitolo 10. Calcolo integrale per funzioni di una variabile
e quindi, per quanto già sappiamo
Z
b
f (x) dx = area T1 − area T2 + area T3 − area T4 .
a
L’integrale rappresenta dunque la differenza fra la somma delle aree dei rettangoloidi
situati al di sopra dell’asse x e la somma dei rettangoloidi situati al di sotto.
10.5
Integrali definiti
Abbiamo già definito l’integrale esteso ad un intervallo [a, b]; si è dunque implicitamente
supposto a < b. Conviene ora allargare il significato dell’integrale per includere anche i casi
a > b, a = b.
Precisamente porremo per definizione
Z
b
a
f (x) dx = −
Z
Z
a
f (x) dx,
se a > b,
(10.20)
b
a
f (x) dx = 0
(10.21)
a
e daremo ora al simbolo
Z
b
f (x) dx
con
aRb
a
il nome di integrale definito della funzione continua f (x), fra i punti a e b, i quali si chiamano
rispettivamente limite inferiore e limite superiore di integrazione.
Osserviamo che il simbolo
Z
b
f (x) dx
a
indica un numero che dipende soltanto dalla funzione f e dai limiti di integrazione a e b; in
tale simbolo non ha dunque alcuna importanza la lettera con la quale si designa la variabile
da cui dipende la funzione f , onde si può scrivere per esempio
Z
a
b
f (x) dx =
Z
b
f (t) dt =
a
Z
b
f (u) du = . . . .
a
Non tutte le proprietà degli integrali estesi ad intervalli, viste in precedenza, si estendono
agli integrali definiti; in generale vengono a cadere, oppure vanno modificate, le proprietà
espresse da disuguaglianze. Ad ogni modo, per evitare errori, elenchiamo qui appresso le
proprietà degli integrali definiti.
102
10.6. Esistenza delle primitive di una funzione continua
10.5.I (Teorema dell’additività) Comunque siano scelti i tre punti a, b, c, si ha:
Z
b
f (x) dx =
a
Z
c
f (x) dx +
a
Z
b
f (x) dx.
(10.22)
c
10.5.II (Teorema della distributività) Se c1 , c2 , . . . , cn sono delle costanti, si ha:
Z
b
a
n
X
ci fi (x) dx =
i=1
n
X
ci
i=1
Z
b
a
fi (x) dx.
(10.23)
10.5.III (Teorema della media) Se g(x) non cambia segno fra i punti a e b, si ha:
Z
b
f (x)g(x) dx = f (ξ)
a
Z
b
g(x) dx
(10.24)
a
ove ξ è un opportuno punto dell’intervallo che ha per estremi i punti a e b.
Nel caso particolare g(x) = 1 il teorema della media diventa:
10.5.IV Si ha:
Z
b
a
f (x) dx = (b − a)f (ξ)
(10.25)
ove ξ è un opportuno punto dell’intervallo che ha per estremi i punti a e b.
10.5.V Sussiste la disuguaglianza
Z
Z b
f (x) dx 6 a
10.6
b
a
|f (x)| dx .
(10.26)
Esistenza delle primitive di una funzione continua
Sia f (x) ∈ C 0 (A). Stabilito il concetto di integrale definito della f (x) fra due punti a, b ∈
A, ritorniamo al problema delle funzioni primitive. Dimostriamo che sussiste il seguente
fondamentale teorema:
10.6.I (Teorema di Torricelli-Barrow) Ogni funzione f (x) ∈ C 0 (A) è in A dotata
di funzione primitiva. Detta c una costante arbitraria ed a un punto comunque fissato
nell’intervallo A, tutte le primitive di f (x) sono date dalla formula
Z x
F (x) = c +
f (t) dt.
(10.27)
a
103
Capitolo 10. Calcolo integrale per funzioni di una variabile
Dim. – Basta provare che F 0 (x) = f (x). Si ha infatti, tenendo conto del 10.5.I:
Z x
Z x+∆x
f (t) dt
f (t) dt − c +
∆F = F (x + ∆x) − F (x) = c +
a
a
=
Z
x+∆x
a
ovvero, applicando il 10.5.IV:
f (t) dt −
Z
x
f (t) dt =
Z
x+∆x
f (t) dt
x
a
∆F = f (ξ)∆x
ove ξ è un punto opportuno dell’intervallo che ha per estremi i due punti x, x + ∆x. Ne segue
∆F/∆x = f (ξ). Si fa ora tendere ∆x a zero; il punto ξ tende ovviamente al punto x, onde
si può scrivere, tenendo anche conto che f (x) è una funzione continua:
lim
∆x→0
∆F
= lim f (ξ) = lim f (ξ) = f (x).
∆x
∆x→0
ξ→x
Osserviamo anzitutto che in (10.27) si è indicata con t la variabile di integrazione per
non confonderla con la x che nella stessa formula indica il limite superiore di integrazione.
È chiaro che
Z x
f (t)dt
a
risulta avere un valore che dipende dalla scelta di x ∈ A; è dunque una funzione di x definita
in A.
Se nella (10.27) si sostituisce al punto a un altro punto α ∈ A, la formula rimane
sostanzialmente inalterata, poiché si può scrivere
Z a
Z x
Z x
f (t) dt = c +
f (t) dt +
f (t) dt
c+
α
α
a
ed osservareR che quest’ultima espressione coincide con il secondo membro della (10.27), in
a
quanto c + α f (t) dt è una costante arbitraria al pari di c.
Dalla (10.27) è facile dedurre che l’integrale definito di una funzione continua f (x) può
essere immediatamente calcolato quando si conosca una primitiva della f (x) (cioè senza far
ricorso al limite delle somme integrali).
Rb
Supponiamo, infatti, di voler calcolare a f (x) dx e di conoscere una primitiva F (x) della
funzione f (x). Per il 10.6.I tale F (x) deve necessariamente essere del tipo (10.27) cioè deve
esistere una costante c tale da poter scrivere:
Z x
F (x) = c +
f (t) dt
a
Ponendo dapprima x = b e poi x = a, si ottengono le
Z b
F (b) = c +
f (t) dt,
F (a) = c
a
104
10.7. Integrali indefiniti
che, sottratte membro a membro, danno
F (b) − F (a) =
Z
b
f (t) dt
a
Si ha dunque il seguente risultato:
10.6.II Detta F (x) una qualsiasi primitiva della funzione continua f (x), si ha
Z b
f (x) dx = F (b) − F (a),
∀ a, b ∈ A,
(10.28)
a
cioè l’integrale definito fra i limiti a, b è uguale all’incremento della primitiva F (x) nel
passaggio dal punto a al punto b.
Si suole anche scrivere
Z
a
b
f (x) dx = [F (x)]ab .
(10.29)
La (10.28) costituisce la formula fondamentale per il calcolo degli integrali definiti.
10.7
Integrali indefiniti
Una qualsiasi funzione primitiva della f (x) si chiama un integrale indefinito della f (x) e si
indica col simbolo
Z
f (x) dx,
(10.30)
che è da considerarsi equivalente a:
c+
Z
x
f (t) dt.
a
L’integrale indefinito (10.30) rappresenta quindi una funzione di x avente come derivata
f (x); tale funzione è determinata soltanto a meno di una costante arbitraria. Si ha cioè per
definizione, ∀ x ∈ A,
Z
Z
D f (x) dx = f (x),
oppure
d f (x) dx = f (x) dx.
(10.31)
e sussiste inoltre la
Z
f 0 (x) dx = f (x) + c,
oppure
Z
df (x) = f (x) + c.
(10.32)
Per quanto detto, risulta immediato trarre dalla tabella delle derivate fondamentali
proposta al capitolo 8 la seguente tabella degli integrali indefiniti immediati.
105
Capitolo 10. Calcolo integrale per funzioni di una variabile
Prima tabella degli integrali indefiniti immediati
Z
Z
x α+1
x dx =
+ c (per α 6= −1)
α+1
Z
1
dx = log x + c
x
Z
cos x dx = sin x + c
Z
sin x dx = − cos x + c
Z
1
dx = tan x + c
cos 2 x
Z
1
dx = − cot x + c
sin 2 x
α
Z
Z
e x dx = e x + c
cosh x dx = sinh x + c
sinh x dx = cosh x + c
Z
1
dx = tanh x + c
cosh 2 x
Z
1
dx = − coth x + c
sinh 2 x
Z
1
√
dx = arcsin x + c
1 − x2
Z
1
dx = arctan x + c
1 + x2
Dalla precedente tabella si può dedurre la seguente, più generale, in cui f (x) indica una
qualsiasi funzione di classe C 1 :
Seconda tabella degli integrali indefiniti immediati
Z
[f (x)] α+1
+c
[f (x)] df (x) =
α+1
Z
df (x)
= log f (x) + c
f (x)
Z
Z
Z
Z
α
Z
e f (x) df (x) = e f (x) + c
Z
sinh f (x) df (x) = cosh f (x) + c
Z
df (x)
dx = − coth f (x) + c
sinh 2 f (x)
Z
(per α 6= −1)
Z
cos f (x) df (x) = sin f (x) + c
sin f (x) df (x) = − cos f (x) + c
Z
df (x)
= tan f (x) + c
cos 2 x
Z
df (x)
= − cot f (x) + c
sin 2 x
cosh f (x) df (x) = sinh f (x) + c
df (x)
= tanh f (x) + c
cosh 2 f (x)
df (x)
p
= arcsin f (x) + c
1 − f (x) 2
df (x)
= arctan f (x) + c
1 + f (x) 2
Queste formule si dimostrano tutte immediatamente applicando la (10.31), ossia facendo
vedere che il differenziale del secondo membro coincide con quanto sta scritto al primo
membro sotto il segno di integrale.
106
10.8. Integrazione per parti. Integrazione per sostituzione
Con lo stesso criterio si dimostrano pure subito le seguenti proprietà degli integrali indefiniti (basta far vedere che il differenziale del primo membro è uguale al differenziale del
secondo membro):
Z
Z X
n
c f (x) dx = c
ci fi (x) dx =
i=1
n
X
ci
i=1
Z
Z
Z
f (x) dx
(c = costante)
fi (x) dx
(c1 , . . . cn costanti)
0
u(x)v (x) dx = u(x)v(x) −
Z
f (x) dx
=
x=ϕ(t)
Z
Z
v(x)u0 (x) dx
f [ϕ(t)]ϕ0 (t) dt
(10.33)
(10.34)
(10.35)
(10.36)
Dalle formule della seconda tabella e dalla (10.33) segue già la possibilità di calcolare vari
integrali indefiniti, operando delle semplici trasformazioni sulla funzione integranda. Diamo
alcuni esempi.
Z
1
+1
1
x n
n √
1
n
−n
√
+
c
=
x n−1 + c ;
dx
=
x
dx
=
n
1
n−1
x
− +1
n
Z
Z
dx
d(x − α)
=
= log(x − α) + c ;
x−α
x−α
Z
−
Valendosi anche della (10.34), si può tentare di decomporre la funzione integranda nella
somma di funzioni facilmente integrabili. Alcuni esempi.
Z
x n+1
xn
x2
+ a1
+ . . . + an−1
+ an x + c ;
n+1
n
2
Z
Z
Z
Z
1 + cos 2x
1
1
1
2
cos x dx =
dx =
dx +
cos 2x d(2x) = (x + sin x cos x) + c .
2
2
4
2
(a0 x n + a1 x n−1 + . . . + an−1 x + an ) dx = a0
10.8
Integrazione per parti. Integrazione per sostituzione
La (10.35) esprime la cosiddetta regola di integrazione per parti. Essa si può scrivere
brevemente
Z
Z
udv = uv −
vdu
107
Capitolo 10. Calcolo integrale per funzioni di una variabile
e riconduce il calcolo di un integrale indefinito al calcolo di un’altro integrale indefinito; se
quest’ultimo risulta essere un integrale immediato, la regola permette di ottenere il calcolo
del primo. Ecco alcuni esempi.
Z
Z
Z
x cos x dx =
x d(sin x) = x sin x −
sin x dx = x sin x + cos x + c ;
Z
log x dx = x log x −
Z
x d(log x) = x log x −
Z
x
dx
= x log x − x + c .
x
La formula (10.36) fornisce la cosiddettaR regola di integrazione per sostituzione
la quale
R
riconduce il calcolo dell’integrale indefinito f (x) dx a quello dell’integrale f [ϕ(t)]ϕ0 (t) dt.
Può darsi che, con
scelta della funzione ϕ(t), quest’ultimo sia facilmente calcoR opportuna
0
labile. Posto allora f [ϕ(t)]ϕ (t) dt = G(t)+c, se la funzione x = ϕ(t)
R ammette una funzione
inversa t = ψ(x), si otterrà in definitiva per l’integrale richiesto f (x) dx = G[ψ(x)] + c.
Alcuni esempi.
Z p
a 2 − x 2 dx.
Si adotta la sostituzione
x = a sin t,
con
dx = a cos tdt;
e l’inversa
t = arcsin
x
a
ottenendo
Z
Z p
Z p
1
cos t dt = a 2 (t + sin t cos t) + c ;
a 2 − x 2 dx =
a 2 − a 2 sin 2 t · a cos t dt = a 2
2
Z
tan 3 x dx.
Si adotta la sostituzione
x = arctan t,
ottenendo
Z
10.9
tan x dx =
3
Z
con
dx =
dt
;
1 + t2
e l’inversa
t = tan x
1
tan 2 x
t3
2
2
dt
=
t
−
log(1
+
t
)
+
c
=
+ log cos x + c ;
1 + t2
2
2
Regole per il calcolo degli integrali definiti
Come abbiamo visto, la regola fondamentale per il calcolo degli integrali definiti è fornita
dalla formula
Z b
f (x) dx = [F (x)]ab = F (b) − F (a)
(10.37)
a
ove F (x) indica una primitiva di f (x). Nei casi in cui questa primitiva si debba calcolare
per mezzo di una integrazione per parti o per sostituzione, il calcolo può essere abbreviato
tenendo conto dei due risultati seguenti:
108
10.9. Regole per il calcolo degli integrali definiti
10.9.I (Integrazione definita per parti) Se in un certo intervallo A le due funzioni
u(x), v(x) sono di classe C 1 , allora, comunque si prendano a, b ∈ A risulta
Z
b
a
u(x)v 0 (x) dx = [u(x)v(x)]ab −
Z
b
v(x)u0 (x) dx.
(10.38)
a
Dim. – Infatti si ha per la (10.37)
Z
b
a
[u(x)v(x)]0 dx = [u(x)v(x)]ab ,
ma il primo membro vale
Z
b
u(x)v 0 (x) dx +
a
Z
b
v(x)u0 (x) dx
a
e ne segue la (10.38).
10.9.II (Integrazione definita per sostituzione) Sia f (x) una funzione continua nell’intervallo A dell’asse x e x = ϕ(t) una funzione di classe C 1 nell’intervallo B dell’asse t.
Se, al variare di t in B, la x = ϕ(t) assume sempre valori x ∈ A, allora, comunque si fissino
t1 , t2 ∈ B, si ha:
Z t
Z ϕ(t )
2
2
f (x) dx =
f [ϕ(t)]ϕ0 (t) dt.
(10.39)
t1
ϕ(t1 )
Dim. – Infatti se F (x) è una primitiva di f (x) nell’intervallo A, di conseguenza F [ϕ(t)] è
una primitiva di f [ϕ(t)]ϕ0 (t) nell’intervallo B. Dal primo fatto segue per la (10.37)
Z
ϕ(t2 )
ϕ(t1 )
Z
t2
t1
f (x) dx = [F (x)] ϕ(t2 ) = F [ϕ(t2 )] − F [ϕ(t1 )],
ϕ(t1 )
f [ϕ(t)]ϕ0 (t) dt = {F [ϕ(t)]}tt2 = F [ϕ(t2 )] − F [ϕ(t1 )],
1
e dalle due relazioni scritte si trae la (10.39).
La (10.39) esprime in sostanza che quando si opera una sostituzione x = ϕ(t) in un
Rb
integrale definito a f (x) dx occorre, non solo cambiare f (x) in f [ϕ(t)], dx in ϕ0 (t) dt (come
negli integrali indefiniti), ma è necessario anche cambiare i limiti di integrazione sostituendo
ad a un qualunque valore t1 tale che ϕ(t1 ) = a ed a b un qualunque valore t2 tale che
ϕ(t2 ) = b. Si noti che non è affatto necessario che x = ϕ(t) sia dotata di funzione inversa.
Per mostrare una significativa applicazione di quanto visto in questo capitolo, ed in
particolare della regola appena proposta, torniamo alla formula di Taylor.
109
Capitolo 10. Calcolo integrale per funzioni di una variabile
Avevamo anticipato l’esistenza di espressioni alternative — rispetto alla (9.19) — per il
resto della formula di Taylor (9.14) che, basandosi sul concetto di integrale, solo ora possono
essere formulate.
Facciamo su f (x) la seguente ipotesi, più restrittiva di quelle adottate nel capitolo 9:
γ) la f (x) è in A di classe C n+1 .
Si ha allora il seguente risultato:
10.9.III Nell’ipotesi γ il resto Rn (x) della formula di Taylor (9.14) ha l’espressione seguente:
Z x
(x − t) n (n+1)
f
(t) dt.
(10.40)
Rn (x) =
n!
x
0
Dim. – Facciamo vedere che l’integrale a secondo membro di (10.40) può essere calcolato
eseguendo delle successive integrazioni per parti. Eseguendo una prima integrazione per
parti si ottiene:
t=x
Z x
Z x
(x − t) n (n+1)
(x − t) n (n)
(x − t) n−1 (n)
f
(t) dt =
f (t)
+
f (t) dt
n!
n!
(n − 1)!
x
x
t=x0
0
=−
(x − x0 ) n (n)
f (x0 ) +
n!
0
Z
x
x0
(x − t) n−1 (n)
f (t) dt.
(n − 1)!
Ripetiamo su quest’ultimo l’integrazione per parti, ricavando in tal modo
Z x
(x − x0 ) n (n)
(x − x0 ) n−1 (n−1)
(x − t) n (n+1)
f
(t) dt = −
f (x0 ) −
f
(x0 )
n!
n!
(n − 1)!
x
0
+
Z
x
x0
(x − t) n−2 (n−1)
f
(t) dt,
(n − 2)!
e cosı̀ proseguiamo. È ovvio che, dopo n integrazioni per parti, arriveremo alla formula
seguente:
Z x
(x − x0 ) n (n)
(x − x0 ) n−1 (n−1)
(x − t) n (n+1)
f
(t) dt = −
f (x0 ) −
f
(x0 ) − . . .
n!
n!
(n − 1)!
x
0
(x − x0 ) 2 00
x − x0 0
f (x0 ) −
f (x0 ) +
−
2!
1!
Z
x
f 0 (t) dt.
x0
Ma quest’ultimo integrale vale f (x) − f (x0 ) e perciò si ha in definitiva
Z x
(x − x0 ) n (n)
(x − t) n (n+1)
f
(t) dt = −
f (x0 ) − . . . − (x − x0 ) f 0 (x0 ) − f (x0 ) + f (x).
n!
n!
x
0
Allora, ricavando di qui f (x) e confrontando con (9.14) si vede precisamente che sussiste la
(10.40).
110
10.9. Regole per il calcolo degli integrali definiti
Dal risultato precedente si possono immediatamente ricavare altre due notevoli espressioni
del resto Rn (x). Infatti, applicando all’integrale a secondo membro di (10.40) il teorema della
media 10.5.IV, si ottiene
Rn (x) = (x − x0 )
(x − ξ) n (n+1)
f
(ξ)
n!
(10.41)
ove ξ è un opportuno punto (dipendente da x) dell’intervallo individuato dai due punti x0 e
x. La (10.41) fornisce il cosiddetto resto di Cauchy.
Tenuto poi conto che nel predetto intervallo la funzione (x − t) n /n! ha segno costante,
possiamo anche applicare all’integrale (10.40) il teorema della media 10.5.III e scrivere
Rn (x) = f
(n+1)
(ξ)
Z
x
x0
t=x
(x − t) n
(x − t) n+1
(n+1)
dt = f
(ξ) −
n!
(n + 1)!
t=x0
ossia
Rn (x) =
(x − x0 ) n+1 (n+1)
f
(ξ)
(n + 1)!
(10.42)
ove ξ è un opportuno punto dell’intervallo che ha per estremi x0 e x. La (10.42) fornisce il
cosiddetto resto di Lagrange.
Per n = 0 la formula di Taylor, con il resto di Lagrange, si scrive
f (x) = f (x0 ) + (x − x0 )f 0 (ξ)
e ci fa ritrovare il teorema di Lagrange 9.1.V.
Nel caso particolare che la f (x) sia un polinomio p(x) di grado n, la sua derivata (n + 1)esima è identicamente nulla ed allora la (11-1-13) fornisce Rn (x) = 0; ne segue che la (9.14)
si scrive
p(x) = p(x0 ) + p0 (x0 )(x − x0 ) +
p00 (x0 )
p (n) (x0 )
(x − x0 ) 2 + . . . +
(x − x0 ) n
2!
n!
e perciò fornisce il polinomio p(x) ordinato rispetto alle potenze del binomio x − x0 .
111
(10.43)