Principi di Statica
La statica è quella parte della meccanica che studia l’equilibrio dei corpi sotto l’azione di forze
esercitate su di essi. Ciò richiede una definizione per i concetti di equilibrio e di forza.
• equilibrio.
Un sistema fisico si dice in equilibrio se la velocità di tutti i punti materiali che lo compongono è
costantemente nulla.
• Forze
Ai fini della statica, le forze sono gli agenti capaci di distogliere un corpo dall’equilibrio.
L’interesse della statica è volto verso quei particolari sistemi di forze che, applicati ad un sistema,
non lo distolgono dall’equilibrio. In questo caso si dice che le forze in gioco si fanno equilibrio.
• Unità di misura della forza
Sebbene sia possibile definire unità di misura della forza avvalendosi di mezzi
puramente statici, l’unità di misura del S.I. (Sistema Internazionale) è definita in base
agli effetti dinamici delle forze. È quindi opportuno anticipare alcuni concetti di
dinamica e definire il newton (N) come:
1 newton =1N= la forza che, applicata alla massa campione di 1 kg, produce su di
essa un’accelerazione di 1m/s2.
L’esperienza insegna che l’accelerazione prodotta da una forza su una massa qualsiasi
è direttamente proporzionale alla forza e inversamente proporzionale alla massa.
Quindi le forze possono essere confrontate con l’unità di misura del S.I. (il newton)
misurando la massa dei corpi su cui sono applicate e l’accelerazione da esse prodotta.
Ad esempio, siccome sappiamo che la caduta della massa di 1kg avviene con una
accelerazione costante di 9.8 m/s2 circa, allora la forza che agisce su di esso è di 9.8 N.
Se fossero stati 2 kg, i newton sarebbero stati 19.6.
Altro dato di esperienza, le forze hanno una natura vettoriale: ovvero ad esse è possibile associare
non solo un’intensità ma anche una direzione ed un verso.
Equilibrio di un punto materiale e di un sistema di punti materiali
Si verifica che un punto materiale è in equilibrio solo se la somma vettoriale delle forze agenti su di
esso (chiamata risultante delle forze) è nulla.
R ≡ F1 + F2 + ... + FN = 0
F2
F1
F3
Se un sistema fisico è formato da tanti punti materiali, il sistema è in equilibrio se e solo se la
condizione R=0 è soddisfatta per ognuno dei punti che lo compongono.
1. Equilibrio di un corpo rigido
Un corpo rigido è un sistema di punti materiali che non possono cambiare la loro distanza reciproca.
Questo è possibile soltanto se esistono forze presenti all’interno del corpo stesso e che impediscono
alle varie parti del corpo di allontanarsi o di avvicinarsi. L’equilibrio di un corpo rigido, quindi, è
determinato dall’annullarsi, per ciascuno punto che lo compone, della somma di tutte le forze che
agiscono su di esso, sia quelle esterne, applicate da fuori, sia quelle che emergono all’interno del
corpo stesso.
Sfortunatamente, noi di solito conosciamo solo le forze che agiscono dall’esterno sul corpo, non
quelle che emergono fra tutti i punti che lo compongono (che di solito fra l’altro sono in numero
enorme).
Per determinare le condizioni per l’equilibrio di un corpo rigido siamo quindi costretti a seguire una
strada indiretta.
Per cominciare notiamo due fatti sperimentali, validi per tutti i corpi rigidi:
a) Se si applicano più forze con risultante nulla allo stesso punto di un corpo rigido, il corpo
non viene distolto dall’equilibrio (fig 1a)
b) Se si applicano due forze uguali e opposte in punti diversi di un corpo rigido, dirette però
secondo la stessa retta di azione, il corpo non viene distolto dall’equilibrio (fig 1b).
1a)
1b)
F
F2
-F
F1
F3
Partendo da questi semplici principi, si ricavano tutte le condizioni fondamentali sull’equilibrio dei
corpi rigidi.
Infatti da questi due fatti si deduce che
1) L’effetto di due o più forze applicate ad uno stesso punto non cambia se ad esse si
sostituisce la loro risultante (fig 2a)
Infatti, se nello stesso punto applico la risultante R ed il suo opposto –R, si vede che -R si annulla
con le forze pre-esistenti per la proposizione a), quindi rimane solo la risultante R.
Il principio 1) vale anche all’inverso, ovvero
1’) L’effetto di una forza non cambia se ad essa si sostituiscono due o più forze aventi la stessa
risultante.
Inoltre vale il seguente principio.
2) Si può trasportare una forza lungo la sua retta di azione senza mutare il suo effetto ai fini
dell’equilibrio. (fig 2b)
Infatti, se lungo la stessa retta di azione di F applico due forze uguali alla prima, ma l’una opposta
dell’altra, F’ ed -F’, si vede che F e -F’ si annullano per la proposizione b), mentre rimane solo F’.
2a)
F2
F
R
F1
-R
2b)
F’
- F’
Con i principi 1) 1’) e 2) si possono spesso ridurre sistemi di più forze ad altri formati da un numero
di forze inferiore.
Ad esempio, per due forze complanari ma non parallele (fig 3a), si può applicare prima la 2),
sostituendo ogni forza con una equivalente ma applicata nel punto di incontro delle rette di
applicazione, e poi la 1), sostituendo le due forze con la loro risultante.
3a)
F2
3b)
F1
R
F2
R
F1
Invece, con due forze parallele (fig 3b), prima si applicano due forze uguali e contrarie, che non
hanno effetto per la proposizione b), poi si calcolano le due risultanti e si procede come nel caso
precedente.
Come conseguenza, sarà quasi sempre possibile equilibrare due forze complanari applicando
l’opposto della loro risultante in un punto opportuno, scelto in modo tale che, con l’applicazione dei
principi 1) 1’) e 2), il sistema di forze complessivo sia equivalente ad una forza nulla.
Il quasi del periodo precedente è dovuto al fatto che sussiste una eccezione importante: quella di
due forze parallele ed opposte (fig 4). In questo caso, si verifica che l’applicazione di altre due forze
opposte e dirette lungo una stessa retta di azione non produce l’effetto di far convergere le direzioni
delle risultanti in un punto: si ottengono infatti ancora due rette parallele.
4)
F
-F
L’insieme di due forze parallele ed opposte si chiama coppia di forze. Una coppia di forze può
essere ridotta ad un’altra coppia ad essa equivalente, ma non ad una forza singola come nel caso
precedente.
Data una coppia di forze, si chiama momento della coppia M il prodotto del modulo di una delle
forze per la distanza fra le due rette d’azione, detta braccio della coppia. Si nota che, riducendo una
coppia ad un’altra equivalente, il momento della coppia non cambia.
5)
b’
b
θ
F
θ F’
F
mentre b' = b cos θ , quindi M = Fb = F ' b' = M ' .
cos θ
Dal punto di vista fisico, l’effetto di una coppia si traduce in una tendenza alla rotazione del corpo a
cui la coppia è applicata.
Infatti, con riferimento alla figura 5: F ' =
Ora, data una coppia di forze applicate nei punti P e Q (fig 6), la cui distanza si possa rappresentare
con il vettore r, il momento della coppia si può esprimere in funzione dell’angolo formato da r ed F
nel seguente modo
6)
b
P θ
r
F
Q
θ
M = Fb sin θ
Ciò suggerisce di definire un vettore momento della coppia, dato dal prodotto vettoriale del vettore
distanza r fra i punti di applicazione P e Q e la forza applicata a Q (oppure, la distanza fra Q e P e la
forza applicata a P):
M =r ∧F
Si tratta di un vettore che ha direzione ortogonale al piano della coppia, e verso determinato dal
verso della rotazione indotta dalla coppia: guardando dalla direzione indicata dal vettore M, la
rotazione avverrebbe in senso antiorario.
Si può notare che, se si fissa un punto O qualsiasi (fig 7), e si considerano i due prodotti vettoriali
M 1 = r1 ∧ F1 ed M 2 = r2 ∧ F2 , dove r1 ed r2 sono le distanze di P e Q da O ed F1 ed F2 sono i due
elementi della coppia di forze, si ottiene
M 1 + M 2 = r1 ∧ F1 + r2 ∧ F2 = r1 ∧ F + r2 ∧ − F = ( r1 − r2 ) ∧ F = r ∧ F = M
( )
7)
P
r
F2
r2
F1
Q
r1
O
Ciò è come dire che se definiamo il momento di una forza F rispetto ad un punto O come il
prodotto vettoriale fra il vettore posizione del punto di applicazione rispetto ad O e la forza stessa, il
momento di una coppia risulta uguale alla somma dei momenti delle forze che la compongono.
Enunciamo ora un teorema che accetteremo senza dimostrazione
Teorema: Ogni sistema di forze applicate ad un corpo può essere ricondotto ad una sola forza ed
una sola coppia; il sistema così ottenuto ha uguale risultante ed uguale momento risultante (rispetto
ad un punto qualsiasi) di quello di partenza.
Quindi, le trasformazioni 1) 1’) e 2) permettono di sostituire qualsiasi sistema di forze, per quanto
complesso, all’azione di una sola forza e di una sola coppia.
Il teorema appena enunciato ha i seguenti importanti corollari:
Corollario 1: perché un corpo rigido sia in equilibrio è necessario e sufficiente che la forza e la
coppia equivalenti al sistema di forze siano entrambi nulli, ovvero che siano entrambi nulli la
risultante ed il momento risultante delle forze applicate; quindi:
R = 0
prima equazione cardinale della statica
.
seconda equazione cardinale della statica
M = 0
È importante notare che ai fini dell’equilibrio non è importante la scelta del punto rispetto al quale
si calcolano i momenti delle forze, perché se il momento risultante è nullo rispetto ad un punto, è
nullo anche rispetto a qualsiasi altro punto.
Le due equazioni cardinali della statica permettono di impostare e risolvere qualsiasi problema di
statica di un corpo rigido.
2. Vincoli e forze vincolari
È esperienza comune che il moto di più corpi rigidi l’uno rispetto all’altro sia limitato proprio dalla
rigidità dei corpi stessi. Ad esempio, un corpo può scivolare su un piano rigido, ma non può
attraversarlo; un pendolo può tendere una funicella inestensibile, ma non può allungarla, una porta
può ruotare sui suoi cardini, ma non può svellerli, e così via. Gli oggetti che limitano il moto dei
corpi a causa della propria rigidità sono chiamati vincoli, e le forze che essi esercitano per
mantenere il moto dei corpi su traiettorie geometricamente definite sono dette forze vincolari o
anche reazioni vincolari.
Esistono fondamentalmente tre tipi di vincoli che interessano in meccanica:
1) punti fissi (fig 8a), che obbligano un corpo a mantenere fisso uno dei suoi punti. Tipico esempio
è il giunto sferico, costituito da una sfera che può ruotare in una sede opportuna:
8a)
8b)
8c)
2) asse fisso (fig 8b) che obbliga il corpo a mantenere fissi due dei suoi punti (e quindi anche tutti i
punti dell’asse a cui i due punti appartengono)
3) superficie (fig 8c), che obbliga uno o più punti di un corpo a restare sulla superficie stessa (o
comunque a non attraversarla).
I vincoli suddetti si dicono ideali o non ideali a seconda che si verifichino o meno le seguenti
circostanze
Punto fisso: è ideale se non esercita alcun momento rispetto al punto stesso, in pratica, se la
rotazione intorno al punto non è ostacolata
Asse fisso: è ideale se il momento delle forze da esso esercitate è perpendicolare all’asse stesso, in
pratica, non ostacola la rotazione intorno all’asse.
Superficie: è ideale se non esercita alcuna forza tangenziale su punti che si muovono parallelamente
alla superficie, in pratica, non ostacola lo scivolamento lungo la superficie.
Alcuni semplici problemi di applicazione:
1) Una lastra piana praticamente senza peso può scivolare su tre punti posti sul piano
orizzontale xy nelle posizioni (riferite ad un piano cartesiano ortogonale): O(0,0), P(2,0),
Q(0,4). Una massa praticamente puntiforme di 10kg viene appoggiata sul punto R(1,1),
determinare le reazioni esercitate su ciascuno dei punti O, P, Q.
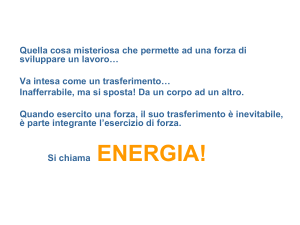
2) Un pennone di massa m = 7 kg e lungo 4 m
viene fissato su un piano verticale nel modo
indicato in figura, libero di ruotare intorno al
punto fisso P ma fissato alla parete da una
fune inestensibile. Gli angoli sono quelli
indicati in figura, mentre il peso del pennone
si può immaginare praticamente concentrato
nel baricentro (un concetto che introdurremo
rigorosamente fra poco), posto a metà asta.
Determinare le reazioni esercitate dalla fune
e dal punto fisso.
R
60°
S
Q
60°
PQ = 2 m
P
3. Centro di massa e baricentro
Se un corpo è costituito da un certo numero N di punti materiali, ognuno di massa m1, m2 … mN,
poste nei punti r1, r2, … rN (fig 9), le forze peso che agiscono sul corpo sono tutte forze fra loro
parallele e proporzionali ad ognuna delle masse: F1 = m1g, F2 = m2g, e così via. Si vuol dimostrare
che il sistema di forze F1, F2 … FN è riducibile ad un’unica forza.
In pratica, basta dimostrare che la risultante R = F1 + F2 + … + FN, se applicata in un punto
opportuno, produce lo stesso momento del sistema di forze F1, F2 … FN rispetto a qualsiasi centro di
riduzione O.
Infatti, per il teorema di pagina 5, la forza e la coppia equivalenti al sistema di forze hanno la stessa
risultante e lo stesso momento risultante del sistema originario. Se si può ridurre il sistema ad una
sola forza quindi (senza la coppia), questa deve per forza essere uguale alla risultante, ed il
momento da essa prodotto deve essere uguale a quello complessivo del sistema.
9)
O
ri
rG
Fi=mig
R
Infatti, se r1, r2, … rN sono i vettori posizione rispetto ad O, si vede che
N
∑ mi ri N
N
N
N
N
∧ m g = r ∧ R
M i = ∑ ri ∧ Fi = ∑ ri ∧ mi g = ∑ mi ri ∧ g = i =N1
∑
∑
i
G
i =1
i =1
i =1
i =1
i =1
∑ mi
i =1
Quindi, se si applica la risultante R esattamente nel punto G (chiamato baricentro del sistema), la
cui posizione rG è calcolata come
N
mi ri
∑
rG = i =N1
∑ mi
i =1
(media ponderata con le masse delle posizioni dei vari punti), si ottiene che la risultante ha lo stesso
momento che vien fuori dalla somma di tutti i momenti delle forze peso delle masse che
costituiscono il corpo, essa quindi è equivalente alle forze peso, ai fini dell’equilibrio.
La media dei vettori posizione, ponderata con le masse dei punti, è anche chiamata centro di massa,
ed è un concetto che ha diverse altre applicazioni, sia in statica (come vedremo più avanti), sia,
soprattutto, nella dinamica dei sistemi.
Per un corpo rigido il baricentro ha una posizione indipendente dall’orientazione, che si può
considerare anch’essa rigidamente collegata con quella di tutte le masse mi.
Se il vettore g non fosse lo stesso per tutti i punti, ma avesse comunque la stessa direzione, ancora
si potrebbe definire un baricentro, perché ancora le forze peso sarebbero equivalenti ad una sola
forza (senza la coppia), ma questo baricentro avrebbe una posizione che dipende dall’orientazione
del corpo.
Problemi
1) calcolare la posizione del baricentro di un’asta rigida sottile omogenea di massa M e
lunghezza l.
2) Calcolare la posizione del baricentro di una lastra sottile omogenea a forma triangolare.
3) Calcolare la posizione del baricentro di un cono circolare retto di raggio di base r e altezza
h.
4. Il problema della stabilità dell’equilibrio
L’introduzione dei concetti di equilibrio stabile ed instabile è facilitata dalla discussione del
seguente problema di esempio.
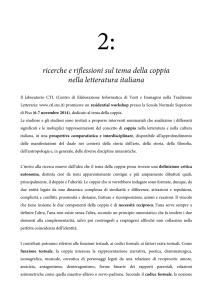
Il sistema rappresentato in figura è costituito da due
volani, uno dei quali costruito con due cilindri solidali
di raggio diverso. I due volani sono vincolati a ruotare
intorno al proprio asse in modo che la velocità
periferica dei due cilindri a contatto sia la stessa
(assenza di strisciamento). Due masse m e 2m vengono
fissate nelle posizioni indicate in figura. Determinare
tutte le posizioni in cui il sistema è in equilibrio,
nell’ipotesi che R1 = 2R2.
2m
R2
R1
R1
m
Bisogna tenere presente che ognuno dei due volani è
soggetto, oltre che alla forza di gravità, anche alla forza
che si sviluppa nel contatto fra i due cilindri, forza che
ha componenti uguali ed opposte sul primo e sul
2m
secondo cilindro (nella figura a fianco, le due forze per
chiarezza sono disegnate con i punti di applicazione di
poco distanti, in realtà bisogna pensarle applicate in due
-F
θ
punti a contatto delle due ruote).
Inoltre, l’angolo di rotazione del primo volano (quello
costituito da due ruote) è superiore all’angolo di
φ
2mg
F
rotazione del secondo, perché lo spazio percorso dai
punti periferici del primo cilindro, che ha raggio
minore, deve essere uguale allo spazio percorso dal
mg
secondo, per cui si ha
R2θ = R1φ , ovvero θ = 2φ (questa relazione viene anche chiamata vincolo cinematico, perché
rappresenta una relazione fra due spostamenti che non dipende dalle forze applicate).
L’equilibrio del primo volano, che può ruotare liberamente intorno al proprio asse, sarà regolato
dalla seconda equazione cardinale della statica, per cui:
M 2 m + M F = R1 sin θ ⋅ 2mg − FR2 = 2 R2 sin θ ⋅ 2mg − FR2 = 0 , mentre per il secondo volano
M m + M − F = − R1 sin φ ⋅ mg + FR1 = 0 le quali si riducono, considerando il vincolo cinematico, a
4mg sin 2φ − F = 0
F − mg sin φ = 0
Il sistema di equazioni suddetto si riduce facilmente all’equazione goniometrica
4 sin 2φ − sin φ = 0 ovvero sin φ ⋅ ( 8 cos φ − 1) = 0
Le soluzioni di quest’equazione sono quindi:
φ = 0 + kπ e
1
1
φ = arccos + 2kπ , φ = 2π − arccos + 2kπ
8
8
Per 0 ≤ φ ≤ 2π si hanno quindi le soluzioni schematizzate nel disegno di seguito raffigurato:
2φ -2φ
φ -φ
φ=arccos1/8
Sono quindi presenti, sostanzialmente, quattro posizioni di equilibrio distinte.
Facciamoci ora la seguente domanda:
“Se il sistema si trova in una di queste posizioni di equilibrio, e viene spostato leggermente da essa,
e poi lasciato andare sotto l’azione delle forze presenti, che cosa fa? Torna indietro verso la
posizione di equilibrio dalla quale l’abbiamo lasciato? Oppure se ne allontana ancora di più per
andare a cadere, magari, in un’altra delle possibili posizioni di equilibrio?”
Il problema, è analogo ad altri più semplici la cui soluzione è più intuitiva. Per esempio, se lasciamo
un corpo rigido libero di ruotare intorno ad un asse orizzontale non passante per il baricentro, è
intuitivo che le posizioni di equilibrio sono due, entrambi con il baricentro sul piano verticale che
contiene l’asse: solo che la prima è sotto l’asse di rotazione, l’altra è sopra.
Qui è immediato constatare che se si allontana il corpo dalla posizione inferiore esso tende a
tornarci, mentre se si allontana da quella superiore esso, sotto l’azione della forza peso, se ne
allontana ancora di più.
Nel primo caso si parla di equilibrio stabile, nel secondo equilibrio instabile.
Per affrontare nel modo più semplice il problema
della stabilità dell’equilibrio di un sistema, studiamo
un problema apparentemente scorrelato da quello che
vogliamo risolvere: cerchiamo di studiare, in funzione
dell’angolo φ, il comportamento della quota del
baricentro del sistema.
Con riferimento alla figura a fianco, se poniamo un
sistema di assi cartesiani ortogonali con l’origine nel
punto di contatto fra i due cilindri e l’asse y verticale,
avremo che la y del baricentro è data da
yG =
θ
φ
2mgR1 cos θ − mgR1 cos φ + M 1 ⋅ 0 + M 2 ⋅ 0 mR1
( 2 cos 2φ − cos φ )
=
2m + m + M 1 + M 2
M
Dove M1, M2 ed M sono rispettivamente le masse dei due volani e la massa totale di tutto il sistema.
Studiamo ora l’andamento della funzione yG(φ) al variare dell’angolo φ, in particolare, studiamo i
punti in cui la funzione è stazionaria ovvero quelli in cui ha un massimo, o un minimo, o
eventualmente un flesso orizzontale.
La derivata di yG rispetto all’angolo φ è
mR1
( − 4 sin 2φ + sin φ ) = − mR1 sin φ ( 8 cos φ − 1)
y G ' (φ ) =
M
M
Che è uguale a zero proprio in
1
1
φ = 0 + kπ e φ = arccos + 2kπ , φ = 2π − arccos + 2kπ .
8
8
La derivata seconda, inoltre, è
mR1
( − 8 cos 2φ + cos φ ) che nei punti suddetti assume i seguenti valori:
y G ' ' (φ ) =
M
mR1
y G ' ' (0) = −7
< 0 quindi si tratta di un punto di massimo relativo (il
in φ = 0 + 2kπ
M
mR1
( 2 − 1) = mR1 ),
baricentro si colloca alla quota yG =
M
M
mR1
y G ' ' (π ) = −9
< 0 ancora un punto di massimo relativo (stavolta il
in φ = π + 2kπ
M
mR1
( 2 + 1) = 3 mR1 ),
baricentro è a y G =
M
M
1
1
63 mR1
1
> 0 , questi sono punti di
in φ = arccos + 2kπ e φ = 2π − arccos + 2kπ y G ' ' (arccos ) =
8
8
8
8 M
33 mR1
minimo, e yG = −
.
16 M
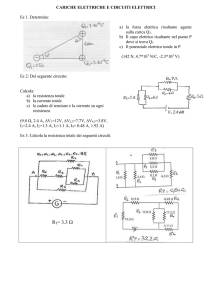
Il grafico della funzione è quello descritto di seguito:
2π - arccos(1/8)
arccos(1/8)
0
π
2π
Ora enunciamo un principio che potrà essere giustificato solo verso la fine del corso (dopo che
avremo trattato dell’energia meccanica e della sua conservazione):
principio della stazionarietà della quota del baricentro:
Se un sistema è soggetto soltanto alle forze peso e a vincoli ideali, le sue posizioni di equilibrio
sono tutte e sole quelle in cui il baricentro assume una quota stazionaria (massimi relativi, minimi
relativi o flessi orizzontali1) rispetto a quelle vicine. Fra queste, le posizioni di equilibrio stabile
sono quelle in cui la quota del baricentro assume un valore minimo relativo.
1
Se la posizione del baricentro è descritta da più di un’incognita (p.es. due angoli invece di uno) allora invece che di
“flessi” si parla di “punti di sella”, ma questo è un punto che richiederebbe il possesso di qualche nozione del corso di
analisi II.
Applicando questo principio si deduce che le posizioni di equilibrio sono proprio quelle già ricavate
per mezzo delle equazioni cardinali della statica, in più, si ricava l’informazione che i punti di
1
1
equilibrio stabile sono φ = arccos + 2kπ , φ = 2π − arccos + 2kπ .
8
8