Meccanica
10. Pseudo-Forze
http://campus.cib.unibo.it/2429/
Domenico Galli
Dipartimento di Fisica e Astronomia
17 febbraio 2017
Traccia
1. Le Pseudo-Forze
2. Esempi
3. Pseudo-Forze nel Riferimento Terrestre
Meccanica – 10. Pseudo-Forze
Pseudo-Forze
D. Galli
Esempi
Pseudo-Forze nel Riferimento Terrestre
2
Cambiamento di Sistema di Riferimento
Come cambia la descrizione del moto passando da un SdR a un altro?
In particolare, come cambia la descrizione del moto passando da un
SdR inerziale a un SdR non-inerziale?
Per quanto riguarda la cinematica, sappiamo che:
~a 0 = ~a + ~aT + ~aC
ovvero l’accelerazione ~a 0 nel
SdR “fisso” è la somma
dell’accelerazione ~a nel SdR
“mobile”, dell’accelerazione
di trascinamento ~aT e
dell’accelerazione
complementare ~aC .
Meccanica – 10. Pseudo-Forze
Pseudo-Forze
D. Galli
Esempi
Pseudo-Forze nel Riferimento Terrestre
3
SdR in Moto Traslatorio Rettilineo
Uniforme
Supponiamo che il riferimento O0 x0 y 0 z 0 sia inerziale.
Se il moto di Oxyz rispetto a O0 x0 y 0 z 0 è traslatorio, rettilineo e
uniforme, si ha:
~aT = ~aO + ω
~˙ ∧~r + ω
~ ∧(~
ω ∧ ~r ) = ~0
|{z}
~0
|{z}
|{z}
~0
~0
~aC = 2 |{z}
ω
~ ∧~v = ~0
~0
⇒
~a 0 = ~a
Il punto materiale ha la medesima
accelerazione nei 2 SdR.
Meccanica – 10. Pseudo-Forze
Pseudo-Forze
D. Galli
Esempi
Pseudo-Forze nel Riferimento Terrestre
4
SdR in Moto Traslatorio Rettilineo
Uniforme (II)
Se il punto P non è soggetto a forze la sua accelerazione è nulla in
O 0 x0 y 0 z 0 :
Perché O0 x0 y 0 z 0 è inerziale.
Poiché ~a 0 = ~a, l’accelerazione del punto P è nulla anche in Oxyz:
Quindi anche il riferimento Oxyz è inerziale.
Inoltre, essendo la forza F~ e la massa m indipendenti dal SdR, dalla
relazione ~a 0 = ~a, troviamo che il II principio della dinamica vale in
entrambi i riferimenti:
F~ = m ~a 0 ,
F~ = m ~a
Meccanica – 10. Pseudo-Forze
Pseudo-Forze
D. Galli
Esempi
Pseudo-Forze nel Riferimento Terrestre
5
SdR in Moto Accelerato
Se il moto di Oxyz rispetto a O0 x0 y 0 z 0 non è traslatorio rettilineo e
uniforme e il SdR O0 x0 y 0 z 0 è inerziale, allora il SdR Oxyz non è
inerziale, poiché risulta:
~a 0 = ~a + ~aT + ~aC 6= ~a
Se l’accelerazione è nulla in O0 x0 y 0 z 0 , non lo è in Oxyz:
P ha accelerazioni diverse nei due SdR;
Tuttavia P è soggetto alla stessa forza nei due SdR:
La forza non dipende dal Sistema di Riferimento.
Segue che il II principio della
dinamica vale nel SdR O0 x0 y 0 z 0
ma non nel SdR Oxyz:
F~ = m ~a 0 ,
F~ 6= m ~a
Stessa forza, diverse accelerazioni nei due SdR.
Meccanica – 10. Pseudo-Forze
Pseudo-Forze
D. Galli
Esempi
Pseudo-Forze nel Riferimento Terrestre
6
SdR in Moto Accelerato (II)
Spesso tuttavia risulta più semplice o più comodo operare in un SdR non
inerziale.
Come si può scrivere la legge della dinamica in un SdR non inerziale?
Possiamo provare a scriverla sommando alla risultante delle forze F~
~ che rappresenta la risultante delle
un termine vettoriale Φ
pseudo-forze che si presentano nel SdR non inerziale:
F~ = m ~a 0 ,
~ = m ~a
F~ + Φ
Dalla relazione ~a = ~a 0 − ~aT − ~aC otteniamo:
~ = m ~a = m ~a 0 − m ~aT − m ~aC =
F~ + Φ
= F~ − m ~aT − m ~aC
da cui:
~ = −m ~aT − m ~aC
Φ
Meccanica – 10. Pseudo-Forze
Pseudo-Forze
D. Galli
Esempi
Pseudo-Forze nel Riferimento Terrestre
7
SdR in Moto Accelerato (III)
Ovvero, definite le pseudo-forze:
~ T = −m ~aT = −m ~aO + ω
Φ
~˙ ∧ ~r + ω
~ ∧ (~
ω ∧ ~r )
î
ó
~ C = −m ~aC = −2m ω
Φ
~ ∧ ~v
dette rispettivamente pseudo-forza di trascinamento e
pseudo-forza complementare o pseudo-forza di Coriolis, si ottiene:
~ =Φ
~T +Φ
~C
Φ
~ = m ~a
F~ + Φ
Si può scrivere la legge fondamentale
della dinamica in un SdR non inerziale
sommando alla risultante F~ delle forze
~ delle pseudo-forze.
la risultante Φ
Meccanica – 10. Pseudo-Forze
Pseudo-Forze
D. Galli
Esempi
Pseudo-Forze nel Riferimento Terrestre
8
SdR in Moto Accelerato (IV)
Nell’espressione della pseudo-forza di trascinamento:
~ T = −m ~aT = −m ~aO + ω
Φ
~˙ ∧ ~r + ω
~ ∧ (~
ω ∧ ~r )
î
ó
il termine:
~ centrifuga = −m ω
Φ
~ ∧ (~
ω ∧ ~r )
è detto pseudo-forza centrifuga, mentre il termine:
~ Eulero = −m ω
Φ
~˙ ∧ ~r
è detto pseudo-forza di Eulero (anche
pseudo-forza trasversale o pseudo-forza
azimutale).
Meccanica – 10. Pseudo-Forze
Pseudo-Forze
D. Galli
Esempi
Pseudo-Forze nel Riferimento Terrestre
9
SdR in Moto Accelerato (V)
~ (dette anche forze inerziali, forze apparenti, forze
Le pseudo-forze Φ
fittizie o forze di d’Alambert):
Non dipendono dalla presenza di altri corpi con cui il punto materiale
P interagisce, dunque non sono vere forze.
Sono tuttavia misurabili con un dinamometro (a dispetto degli
attributi “pseudo”, “fittizie” e “apparenti”) nel SdR non-inerziale;
Sono assenti nei SdR inerziali:
N. B.: La pseudo-forza centrifuga, essendo una pseudo-forza è sempre
assente nei SdR inerziali.
Devono essere considerate e sommate vettorialmente alle forze F~
quando si affronta un problema di fisica in un SdR non-inerziale.
Meccanica – 10. Pseudo-Forze
Pseudo-Forze
D. Galli
Esempi
Pseudo-Forze nel Riferimento Terrestre
10
SdR che Trasla Rispetto a un SdR Inerziale
Moto Rettilineo Uniforme
Esempio
Consideriamo un punto materiale libero sul pavimento di un treno che si muove
a velocità costante:
~ =Φ
~T +Φ
~
Φ
C
~ n = ~0
F~ = F~P + R
ω
~ ≡ 0, ~aO = ~0
⇒
~ T = −m ~aO + ω
Φ
~˙ ∧ ~
r+ω
~ ∧ (~
ω ∧~
r)
~ C = −2m ω
Φ
~ ∧ ~v
~ = ~0
Φ
Se il punto P è inizialmente in quiete rispetto al treno, esso continua a rimanere
in quiete rispetto al treno:
O0 x0 y 0 z 0 : ~v 0 ≡ ~vO
Oxyz :
~v ≡ ~0
Meccanica – 10. Pseudo-Forze
Pseudo-Forze
~a 0 ≡ ~0
~a ≡ ~0
F~ = ~0
~ = ~0
F~ + Φ
D. Galli
Esempi
Pseudo-Forze nel Riferimento Terrestre
11
SdR che Trasla Rispetto a un SdR Inerziale
Moto Rettilineo Accelerato. Punto Libero
Esempio
Consideriamo un punto materiale libero sul pavimento di un treno che frena
con accelerazione costante ~aO :
~ =Φ
~T +Φ
~
Φ
C
~ n = ~0
~
F~ = F~P + R
ΦT = −m ~aO + ω
~˙ ∧ ~
r+ω
~ ∧ (~
ω ∧~
r)
~ C = −2m ω
~ = −m ~aO
Φ
~ ∧ ~v
ω
~ ≡ 0, ~aO 6= ~0 ⇒ Φ
Quindi detto t = 0 l’istante in cui il treno inizia a frenare:
O0 x0 y 0 z 0 : ~v 0 ≡ ~vO (0)
~a 0 ≡ ~0
F~ = ~0
~ = −m ~aO
Oxyz :
~v = −~aO t
~a ≡ −~aO
F~ + Φ
Osservatore a terra: il punto P , inizialmente in
moto con velocità ~v 0 = vO (0), continua a
muoversi con velocità ~v 0 = vO (0).
I Osservatore sul treno: il punto P , inizialmente
in quiete, inizia a muoversi in avanti a causa
della pseudo-forza di trascinamento:
accelerazione del treno
~ =Φ
~ T = −m ~aO
Φ
massa del punto materiale
I
Meccanica – 10. Pseudo-Forze
Pseudo-Forze
D. Galli
Esempi
Pseudo-Forze nel Riferimento Terrestre
12
SdR che Trasla Rispetto a un SdR Inerziale
Moto Rettilineo Accelerato. Punto Trattenuto
Esempio
Consideriamo un punto materiale trattenuto da una molla sul pavimento di un
treno che frena con accelerazione costante ~aO :
~ n + F~e = F~e 6= ~0
~ =Φ
~T +Φ
~
F~ = F~P + R
Φ
C
~
Φ
=
−m
~aO + ω
~˙ ∧ ~
r+ω
~ ∧ (~
ω ∧~
r)
T
~ = −m ~aO
ω
~ ≡ 0, ~aO 6= ~0 ⇒ Φ
~ C = −2m ω
Φ
~ ∧ ~v
Quindi:
0 0 0 0
0
0
O x y z : ~v = ~vO = ~aO t
~a ≡ ~aO
F~ = F~e 6= ~0
~ = F~e − m ~aO = ~0
Oxyz :
~v = ~0
~a ≡ ~0
F~ + Φ
Osservatore a terra: il punto P , inizialmente in
moto con velocità ~v 0 = vO (0), decelera a causa
della molla che lo trattiene.
I Osservatore sul treno: il punto P , rimane in
quiete in quanto la pseudo-forza di trascinamento è equilibrata dalla forza elastica della molla:
~ T = m ~aO ⇒ F~e + Φ
~ T = ~0
F~e = −Φ
I
Meccanica – 10. Pseudo-Forze
Pseudo-Forze
D. Galli
Esempi
Pseudo-Forze nel Riferimento Terrestre
13
SdR che Ruota Rispetto a un SdR Inerziale
Punto Trattenuto, in Quiete nel SdR Mobile
Esempio
I
Consideriamo un punto materiale trattenuto da una molla sul pavimento di
una giostra che ruota uniformemente.
I Supponiamo che il punto P sia in quiete rispetto alla giostra.
I Osservatore a terra: P si muove di moto circolare uniforme. La forza
elastica (centripeta) della molla è uguale al prodotto della massa del punto
per la sua accelerazione:
~ n + F~e = F~e 6= ~0
ṡ = r ω
F~ = F~P + R
2
ṡ
F~ = m~a = m n̂ = −m ω 2 r r̂OP = −m ω 2 ~rOP
|
{z
}
r
centripeta
I Per l’osservatore a terra non sono
elastica
presenti altre forze.
I Per l’osservatore a terra le forze non sono
equilibrate:
Se fossero equilibrate il moto sarebbe
rettilineo e uniforme, non circolare.
Meccanica – 10. Pseudo-Forze
Pseudo-Forze
D. Galli
Esempi
Pseudo-Forze nel Riferimento Terrestre
14
SdR che Ruota Rispetto a un SdR Inerziale
Punto Trattenuto, in Quiete nel SdR Mobile (II)
Esempio
I
Osservatore sulla giostra: P è in quiete.
~ = −m ω 2 ~rOP − m ω
F~ + Φ
~ ∧ (~
ω ∧ ~rOP ) =
{z
}|
|
{z
}
=
centripeta
elastica
−m ω 2 ~rOP
centrifuga
~ =Φ
~T +Φ
~
Φ
C
~ T = −m ~aO + ω
Φ
~˙ ∧ ~
r+ω
~ ∧ (~
ω ∧~
r)
~ C = −2m ω
Φ
~ ∧ ~v
+ m ω 2 ~rOP = ~0
I
La forza elastica (centripeta) della molla è
equilibrata dalla pseudo-forza di trascinamento
(centrifuga).
I Per l’osservatore sulla giostra le forze sono
equilibrate (la risultante è nulla).
I Il punto materiale può rimanere in quiete
proprio perché la risultante è nulla.
Meccanica – 10. Pseudo-Forze
Pseudo-Forze
~aO = ~0 (moto rotatorio giostra),
ω
~ ≡ cost. (moto uniforme giostra),
ω
~˙ = ~0,
~v = ~0 (punto P in quiete).
D. Galli
Esempi
Pseudo-Forze nel Riferimento Terrestre
15
SdR che Ruota Rispetto a un SdR Inerziale
Punto Trattenuto, in Quiete nel SdR Mobile (III)
Esempio
I
Osservatore a terra:
P si muove di moto circolare uniforme.
Le forze non sono equilibrate:
~ n + F~e = F~e = −m ω 2 ~rOP 6= ~0
F~ = F~P + R
L’accelerazione è diversa da zero e centripeta:
F~
ṡ2
~a =
= −ω 2 ~rOP =
n̂ 6= ~0
m
r
I Osservatore sulla giostra:
P è in quiete.
Forze e pseudo-forze sono equilibrate:
~ = F~P + R
~ n + F~e + Φ
~ T = ~0
F~ + Φ
L’accelerazione è nulla (P rimane in quiete):
~
F~ + Φ
~a =
= ~0
m
Meccanica – 10. Pseudo-Forze
Pseudo-Forze
SdR a terra:
Forza centripeta: presente;
Forza centrifuga: assente;
Forza totale: non nulla;
Moto: circolare uniforme.
SdR della giostra:
Forza centripeta: presente;
Forza centrifuga: presente;
Forza totale: nulla;
Moto: assente.
D. Galli
Esempi
Pseudo-Forze nel Riferimento Terrestre
16
SdR che Ruota Rispetto a un SdR Inerziale
Punto Vincolato in una Scanalatura Radiale
Esempio
Consideriamo un punto materiale P vincolato
da una scanalatura radiale sul pavimento di
una giostra che ruota uniformemente.
I Osservatore a terra: P si muove lungo una
traiettoria a spirale, sottoposto alla forza
(tangenziale) del vincolo che si modifica nel
tempo:
~ n = Rn ̂
F~ = R
I
~ =Φ
~T +Φ
~
Φ
C
~
ΦT = −m ~aO + ω
~˙ ∧ ~
r+ω
~ ∧ (~
ω ∧~
r)
~ C = −2m ω
Φ
~ ∧ ~v
~aO = ~0 (moto rotatorio giostra),
ω
~ ≡ cost. (moto uniforme giostra),
ω
~˙ = ~0.
Osservatore sulla giostra:
~ =R
~n + Φ
~T +Φ
~ C = −m ω
F~ + Φ
~ ∧ (~
ω ∧ ~rOP )
I
La pseudo-forza di Coriolis è equilibrata dalla
reazione vincolare della scanalatura:
~ n = −Φ
~ C = 2m ω
R
~ ∧ ~v
I P si muove accelerando in direzione radiale lungo la
scanalatura, soggetto alla pseudo-forza di trascinamento.
Meccanica – 10. Pseudo-Forze
Pseudo-Forze
D. Galli
Esempi
Pseudo-Forze nel Riferimento Terrestre
17
Dipendenza di g dalla Latitudine
Se il SdR terrestre fosse inerziale,
l’accelerazione di caduta dei gravi, g,
sarebbe determinata, in ogni luogo,
soltanto dalla forza gravitazionale.
~ =Φ
~T +Φ
~
Φ
C
~
ΦT = −m ~aO + ω
~˙ ∧ ~
r+ω
~ ∧ (~
ω ∧~
r)
~ C = −2m ω
Φ
~ ∧ ~v
In realtà il SdR terrestre non è
perfettamente inerziale, innanzitutto a
causa della rotazione attorno al proprio asse.
~aO = ~0 (moto rotatorio Terra),
ω
~ ≡ cost. (moto uniforme Terra),
ω
~˙ = ~0,
~v = ~0 (punto in quiete).
Se un punto P sulla superficie terrestre è
in quiete (~v = ~0), la pseudo-forza di Coriolis
è nulla, mentre la pseudo-forza di
~ T vale:
trascinamento (centrifuga) Φ
~ T = −m ω
Φ
~ ∧ (~
ω ∧ ~rOP )
Meccanica – 10. Pseudo-Forze
Pseudo-Forze
D. Galli
Esempi
Pseudo-Forze nel Riferimento Terrestre
18
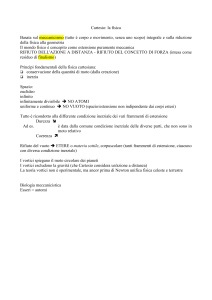
Dipendenza di g dalla Latitudine (II)
~ T è perpendicolare
Per la regola della mano destra (si veda figura), Φ
all’asse terrestre e giace nel piano individuato da P , O e N .
Il modulo di ΦT è:
~ ΦT = m ω 2 R cos θ
k~
ω ∧ ~rOP k = ω R cos θ
k~
ω ∧ (~
ω ∧ ~rOP )k = ω 2 R cos θ
La forza peso m ~g è la risultante dell’attrazione gravitazionale m ~g 0
~T:
e della pseudo-forza centrifuga Φ
~T
m ~g = m ~g 0 + Φ
Separando le componenti parallela e
perpendicolare a ~rOP si ha:
k
⊥
(
m g cos ϕ = m g 0 − ΦT cos θ
m g sin ϕ = ΦT sin θ
Meccanica – 10. Pseudo-Forze
Pseudo-Forze
D. Galli
Esempi
Pseudo-Forze nel Riferimento Terrestre
19
Dipendenza di g dalla Latitudine (III)
k
⊥
(
m g cos ϕ = m g 0 − ΦT cos θ
~ ΦT = m ω 2 R cos θ
m g sin ϕ = ΦT sin θ
ΦT
0
k
cos θ = g 0 − ω 2 R cos2 θ
g cos ϕ = g −
m
Φ
g sin ϕ = T sin θ = ω 2 R cos θ sin θ
⊥
m
Poiché ϕ ≈ 2 mrad ⇒ cos ϕ sin ϕ, si ha:
g (θ) ≈ g 0 (θ) − ω 2 R cos2 θ
legge verificata sperimentalmente.
All’equatore risulta:
g (0) ≈ 9.780 m/s2
g 0 (0) ≈ 9.814 m/s2
ω 2 R ≈ 0.034 m/s2
Meccanica – 10. Pseudo-Forze
Pseudo-Forze
D. Galli
Esempi
Pseudo-Forze nel Riferimento Terrestre
20
Ancora su Massa Inerziale e Massa
Gravitazionale
Per essere più precisi, la forza peso è data da:
(g)
mT m(g)
R̂ − m(i) ω
~ ∧ (~
ω ∧ ~rOP )
R2
Se la massa inerziale non fosse proporzionale alla massa
gravitazionale, allora la direzione della forza peso,
nello stesso luogo, varierebbe al variare
della massa del corpo.
m(i) ~g = −γ
Misurando la costanza della direzione
della forza peso al variare della massa
si conferma sperimentalmente la
proporzionalità tra massa inerziale e
massa gravitazionale.
Meccanica – 10. Pseudo-Forze
Pseudo-Forze
D. Galli
Esempi
Pseudo-Forze nel Riferimento Terrestre
21
Effetti della Pseudo-Forza di Coriolis
Deviazione verso Oriente dei Gravi in Caduta Libera
In entrambi gli emisferi un corpo in caduta
libera devia verso est.
SdR terrestre (non inerziale): è l’effetto
della pseudo-forza di Coriolis:
ω
~ ∧ ~v è diretto verso ovest;
~ C = −2m ω
Φ
~ ∧ ~v è diretto verso est.
SdR inerziale: Il grave, se parte in quiete
rispetto alla Terra, nel SdR inerziale ha una
velocità iniziale ~v0 verso est che non è
modificata dalla gravità durante il moto di caduta.
La velocità angolare ω = RTv0+h perciò aumenta quando il
grave diminuisce l’altezza h, diventando superiore a quella
terrestre.
Meccanica – 10. Pseudo-Forze
Pseudo-Forze
D. Galli
Esempi
Pseudo-Forze nel Riferimento Terrestre
22
Effetti della Pseudo-Forza di Coriolis
Deviazione dei Moti sulla Superficie Terrestre
Se invece un corpo si muove sulla superficie terrestre, è deviato:
Verso destra (rispetto al verso del moto) nell’emisfero Nord;
Verso sinistra (rispetto al verso del moto) nell’emisfero Sud.
~ C = −2m ω
Φ
~ ∧ ~v
emisfero nord: moto verso nord
deviato verso est
Meccanica – 10. Pseudo-Forze
Pseudo-Forze
emisfero nord: moto verso sud
deviato verso ovest
D. Galli
Esempi
Pseudo-Forze nel Riferimento Terrestre
23
Effetti della Pseudo-Forza di Coriolis
Deviazione dei Moti sulla Superficie Terrestre (II)
Nei moti in direzione est-ovest la pseudo-forza di Coriolis, oltre alla
componente orizzontale ha anche una componente verticale.
~ C = −2m ω
Φ
~ ∧ ~v
emisfero nord: moto verso est
deviato verso sud
Meccanica – 10. Pseudo-Forze
Pseudo-Forze
emisfero nord: moto verso ovest
deviato verso nord
D. Galli
Esempi
Pseudo-Forze nel Riferimento Terrestre
24
Effetti della Pseudo-Forza di Coriolis
Deviazione dei Moti sulla Superficie Terrestre (III)
Maggior consumo delle sponde destre dei fiumi (emisfero Nord).
Maggior consumo delle rotaie destre dei binari dei treni (emisfero
Nord).
Moto di cicloni e anticicloni. Il vento è deviato:
Verso destra nell’emisfero nord;
Verso sinistra nell’emisfero sud.
~ C = −2m ω
Φ
~ ∧ ~v
ciclone
anticiclone
emisfero nord
Meccanica – 10. Pseudo-Forze
Pseudo-Forze
ciclone
anticiclone
emisfero sud
D. Galli
Esempi
Pseudo-Forze nel Riferimento Terrestre
25
Effetti della Pseudo-Forza di Coriolis
Pendolo di Foucault
Il piano di oscillazione di un pendolo ruota nel tempo:
Osservatore nel SdR inerziale: il piano di oscillazione del pendolo
rimane costante (perché forza e velocità giacciono sullo stesso
piano), ma la Terra ruota rispetto a esso.
Osservatore nel SdR terrestre: il piano di oscillazione del pendolo
ruota perché in ogni movimento il pendolo è deviato verso destra
(nell’emisfero Nord) dalla pseudo-forza di Coriolis.
curvatura verso destra
esagerata nella figura
Meccanica – 10. Pseudo-Forze
Pseudo-Forze
D. Galli
Esempi
Pseudo-Forze nel Riferimento Terrestre
26
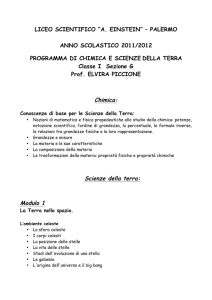
Effetti della Pseudo-Forza di Coriolis
Pendolo di Foucault (II)
Calcoliamo la rotazione del piano di oscillazione del
pendolo nel SdR inerziale:
Il piano di oscillazione del pendolo, al polo, compie
un giro completo in un giorno sidereo.
All’equatore il piano di oscillazione del pendolo
non ruota.
Alla latitudine intermedia ϕ la rotazione
dα del piano di oscillazione del pendolo è
minore della rotazione terrestre dα0 :
0
ds = r dα
r
dα
sin ϕ
sin ϕ
sin ϕ
dα =
ds =
r dα0 = sin ϕ dα0
r
r
ds = DP dα =
Meccanica – 10. Pseudo-Forze
Pseudo-Forze
D. Galli
Esempi
Pseudo-Forze nel Riferimento Terrestre
27
Effetti della Pseudo-Forza di Coriolis
Pendolo di Foucault (III)
Otteniamo quindi:
z}|{
rotazione del piano del pendolo
rotazione della Terra
z}|{
dα = (sin ϕ) dα0
ω = ω 0 sin ϕ
velocità angolare della Terra
velocità angolare di rotazione
del piano del pendolo
A 45◦ di latitudine, il piano del pendolo
ruota in un giorno sidereo di un angolo
pari a:
√
2
360◦ ≈ 254.6◦
∆α =
2
Meccanica – 10. Pseudo-Forze
Pseudo-Forze
D. Galli
Esempi
Pseudo-Forze nel Riferimento Terrestre
28
Domenico Galli
Dipartimento di Fisica e Astronomia
[email protected]
https://www.unibo.it/sitoweb/domenico.galli
https://wiki-lhcb.bo.infn.it/bin/view/GalliDidattica
Meccanica – 10. Pseudo-Forze
D. Galli
29