Il problema della realizzazione
Abbiamo visto come il comportamento di un sistema fisico può essere decomposto in
prima approssimazione in uno o più sistemi elementari (meccanici, termici, elettrici,
idraulici,...) le cui equazioni costitutive sono funzioni differenziali del primo o del secondo ordine. Questi sistemi possono poi essere ricomposti a patto di descrivere e modellare tramite segnali le relazioni di forza, corrente, posizione,... di interazione tra i
sottosistemi medesimi.
La composizione di questi sistemi porta a sistemi di equazioni differenziali lineari di
ordine n. Fissato per tali sistemi una variabile di ingrasso ed una di uscita (ovvero
considerando che tutti gli altri ingressi siano nulli) Un sistema lineare tempo invariante (LTI) di ordine n può essere descritto da una equazione differenziale tempo continua della forma
y ( n ) + an − 1 y ( n − 1) + an − 2 y ( n − 2 ) + ... + a1 y (1) + a0 y = bmu ( m ) + bm − 1u ( m − 1) + bm − 2u ( m − 2 ) + ... + b1u (1) + b0u
Inoltre, quando opportune condizioni iniziali siano state specificate per l’uscita y(t)
del sistema, una trasformazione di laplace del sistema condurrà ad una descrizione del
tipo:
Y(s) = G(s) U(s)
Dove:
bm s m + bm − 1s m − 1 + bm − 2 s m − 2 + ... + b1s + b0 N ( s )
G(s) = n
=
s + an − 1s n − 1 + an − 2 s n − 2 + ... + a1s1 + a0
D( s )
È un rapporto di polinomi nella variabile complessa s. Una caratteristica dei sistemi
fisici lineari è che una volta determinata la relazione tra ingresso uscita (IO), tutte le
altre relazioni IO contengono lo stesso denominatore che viene denominato equazione
caratteristica.
Determinare le equazioni differenziali sottostanti un sistema fisico si dirà che è un
problema di modellazione, descrivere invece un sistema fisico o a blocchi in grado di
implementare una specifica equazione differenziale, si dirà invece un problema di realizzazione.
Da un punto di vista meccatronico è particolarmente rilevante comprendere quali
meccanismi procedurali seguire per sintetizzare sistemi con un a data equazione caratteristica e comprendere quali fattori in una realizzazione digitale possano influenzarne
il comportamento.
Avremo infatti necessità, nel corso delle nostre attività di produrre sia modelli relativi
alle realtà fisiche che stiamo esaminando che modelli inerenti i sistemi sviluppati e
preposti al controllo degli stessi. Di seguito esamineremo quindi quali tecniche potremo utilizzare per la sintesi di sistemi, che siano essi di modello e/o di controllo.
Realizzazione Tempo Continua tramite simulink
Intenderemo di seguito come realizzazione di un sistema tramite l’ambiente simulink
la capacità, data una funzione di trasferimento di realizzare uno schema a blocchi elementari di simulink che ne implementa la caratteristica.
G(s) =
bm s m + bm − 1s m − 1 + bm − 2 s m − 2 + ... + b1s + b0 N ( s )
=
s n + an − 1s n − 1 + an − 2 s n − 2 + ... + a1s1 + a0
D( s )
Per inteso, non è che simulink non consenta con i suoi toolbox di realizzare direttamente una funzione di trasferimento, ma per una serie di motivi, tale opportunità risulta sconsigliabile. Infatti:
1) La realizzazione diretta di una funzione di trasferimento perde della nozione di
stato, e con essa della possibilità di specificare dettagliatamente quelle che
sono le condizioni iniziali.
2) La realizzazione diretta di una funzione di trasferimento utilizza la rappresentazione dei parametri in forma implicita e pertanto non consente in maniera
agevole la composizione dei sottosistemi fisici in base all accesso e modifica
degli stessi;
3) L’assenza delle variabili di stato preclude non solo l’accesso alla condizioni
iniziali, ma limita la descrizione del sistema unicamente alle variabili di ingresso ed uscita non consentendo quindi in questo modo di intervenire (leggere e sovrascrivere) i valori diretti delle variabili di stato;
Una prima trasformazione del sistema per ottenere una rappresentazione a blocchi elementare è quella di mettere la funzione di trasferimento in forma di feedback:
G(s) =
F ( s)
1 + B( s)
Che sappiamo poter essere implementato da un sistema del tipo:
In particolare per ottenere questa formula divideremo numeratore e denominatore per
il grado massimo della variabile s (e cioè n supporto che la fdt sia una funzione propria):
bm
b
b
+ ... + n1− 1 + 0n
n− m
s
s
s
G(s) =
a n− 1 an− 2
a
a1
1+
+ 2 + ... + n − 1 + n0
s
s
s
s
Posto in questi termini possiamo andare a realizzare direttamente la funzione di feedback tramite una catena lineare di integratori.
1
G(s) =
1+
an− 1 an− 2
a
a
+ 2 + ... + n1− 1 + n0
s
s
s
s
Avendo scelto questa specifica forma di realizzazione per l’anello di feedback tutte le
derivate del segnale di uscita sono direttamente disponibili alle uscite degli integratori. Possiamo quindi sintetizzare la funzione completa di uscita andando a prelevare
queste derivate e pre-moltiplicando per i coefficienti del numeratore della funzione di
trasferimento.
Ovviamente una sintesi di questo tipo rispetto alla sintesi a blocco singolo mi consente di accedere completamente a tutte le variabili interne del diagramma e di modificarle per le esplicite esigenze di una sintesi più complessa, ad esempio:
•
•
•
•
interconnessione di blocchi ed individuazione delle componenti di interazione
modifica in tempo reale dei valori misurati agli integratori e aggregazione di
dati eventualmente disponibili da sensori
introduzioni di non linearità nello schema (saturazione su integratori e modifiche di segnali)
cambiamento in tempo reale dei parametri (controllori adattivi)
La realizzazione di sistemi tramite elettronica
Per realizzazione elettronica intenderemo il percorso di sintesi necessario per realizzare tramite componentistica elettronica un comportamento dinamico prestabilito. Nella
parte iniziale del corso abbiamo infatti imparato a creare da uno schema elettrico, le
relative equazioni differenziali e quindi un equivalente sistema dinamico simulabile
con sistemi a blocchi.
Affronteremo ora il problema inverso, ovvero come dato una relazione comportamentale di ingresso uscita definita da un sistema LTI sia possibile realizzare una rete elettrica/elettronica che ne implementi i comportamenti.
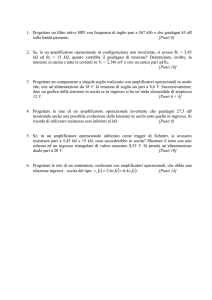
Schemi elettrici semplici
Due tipologie di schemi elementari potranno essere presi in considerazione: le connessioni serie e le connessioni parallelo. Per le prime sarà interessante andare a caratterizzare sia le impedenze complessive che le possibili funzioni di trasferimento ottenibili, per le seconde analizzeremo invece le caratteristiche di impedenza realizzabili:
Ra
Ra
Vin
Vout
Rb
Vin
Vout
Vin
Vout
L
C
(a)
(b)
Zin = Ra+ Rb
(c)
Zin = Ra +
Vout
Rb
=
Vin
Ra + Rb
Zin = R + sL
1
sC
Vout
1
=
Vin
sCRa + 1
Vout
sL
=
Vin
R + sL
I tre elementi di cui sopra hanno funzioni di trasferimento tra ingresso ed uscita pari a
un guadagno regolabile (dove G <= 1), un polo semplice, ed una coppia polo zero.
Ovviamente gli esempi di cui al punto b, possono essere invertiti prendendo l’uscita
sopra la resistenza di ingresso e quindi ottenendo rispettivamente le seguenti funzioni
di trasferimento:
(b)
Vout
Ra
=
,
Vin
sCRa + 1
(c)
Vout
R
=
Vin
R + sL
Ovviamente non risulta possibile (se non idealmente) la realizzazione di un derivatore
puro che corrisponde ad un elemento non strettamente proprio. La derivata compare
sempre associata ad un comportamento passa basso che rende il sistema complessivo
fisicamente realizzabile.
Per ciò che concerne invece le impedenze dei componenti (rapporto V/I) quando sono
connessi in parallelo (in riferimento allo schema di figura seguente) valgono le seguenti relazioni costitutive:
Ra
Ra
C
Rb
(a)
(a) Z =
RaRb
Ra + Rb
Ra
L
(b)
(b) Zin =
Ra
sCRa + 1
(c)
(c) Z =
sRL
R + sL
A differenza dei blocchi di Matlab/Simulink ed utilizzati in teoria dei controllo, le interconnessioni dei componenti elettrici non sono indipendenti. Ogni nuova connessione può difatti alterare il comportamento del circuito stesso in base alla caratteristiche
della connessione stessa.
Alcuni elementi composti
Negli esempi precedenti, il comportamento del sistema legava reciprocamente i fattori
di guadagno e dei polo. In questi casi per poter avere maggiore libertà nel definire le
caratteristiche della funzione di trasferimento occorre aggiungere alcuni elementi in
più:
Le tre funzioni di trasferimento associate sono rispettivamente:
R2
V out
s C 1 R 21
R2
=
=
(A)
V in
R2
sC 1 R1 R2 R1R2
R1
s C 1 R2 1
(B)
s L1 R 2
V out
s L1 R2
s L 1 R2
=
=
V in
s L1 R 2
sL1 R1 R2 R1 R 2
R1
s L1 R 2
(C)
V out
R1 C 1
= 2
V i n s L1 C 1s C 1 R21
Mentre i primi due esempi ci permettono di avere più flessibilità nella individuazione
dei parametri, il terzo caso ci consente, organizzando opportunamente i componenti e
l'uscita, di realizzare funzioni di trasferimento del II ordine.
L'amplificatore operazionale
L'uso degli amplificatori operazionali consentono di estendere le tipologie di sistemi
rappresentabili tramite reti elettriche. Oggi amplificatori operazionali sono considerati
dei componenti integrati a semiconduttore in grado di eseguire una funzione di amplificazione lineare tra la tensione di un segnale in ingresso e la tensione di un segnale in
uscita. Il termine operazionale deriva dal fatto che, originariamente, tale dispositivo
veniva usato nei calcolatori analogici per svolgere operazioni matematiche (come
somme, sottrazioni, moltiplicazioni, integrali, derivate, ecc...) su segnali elettrici. I
primi operazionali infatti furono realizzati negli anni ‘40 con valvole. Successivamente l'uso del transistore bipolare ha consentito una riduzione dei consumi ed un notevole miglioramento in termini di occupazione di spazio tramite moduli a componenti discreti.
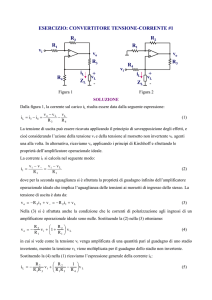
L’amplificatore operazionale (AO) è un circuito integrato composto da resistenze, capacità, diodi e transistori collegati in rete ed incapsulati in un contenitore, che viene
collegato normalmente al circuito mediante una zoccolatura a pressione.
L’AO può essere definito funzionalmente come un amplificatore differenziale, cioè
un dispositivo attivo a tre terminali che genera al terminale di uscita una tensione proporzionale alla differenza di tensione fornite ai due terminali di ingresso.
Lo stadio di ingresso di un amplificatore operazionale è quello di un amplificatore differenziale, sono pertanto disponibili due piedini IN+ e IN- che vengono alimentati con
un segnale. Si definisce resistenza di ingresso l'impedenza vista a questi due terminali
da un segnale eccitante esterno. Si assume che un amplificatore operazionale ideale ha
una resistenza di ingresso infinita, nella realtà questa resistenza varia da qualche
Mohm a qualche centinaio di Mohm.
Dopo un passaggio interno, il segnale differenziale prelevato dallo stadio differenziale
di ingresso viene inviato ad uno stadio monopolare di uscita, in cui cioè viene reso disponibile un solo segnale. Lo stadio di uscita in condizioni di amplificatore differen-
ziale ideale si comporta come un generatore pilotato in tensione, con una resistenza
serie nulla. In realtà negli amplificatori reali questa resistenza è pari a una decina di
Ohm.
Gli amplificatori operazionali più diffusi usano uno stadio di uscita in grado di comportarsi bene per piccole correnti (qualche decina di milliampere). Uno degli amplificatori operazionali più diffusi è il 741, disponibile sia in contenitori metallici (TO)
che in contenitori plastico (DIL).
La piedinatura è la stessa qualunque sia il modello di amplificatore preso in considerazione:
1. Offset
2. IN3. IN+
4. V5. Offset
6. Out
7. V+
8. N.C.
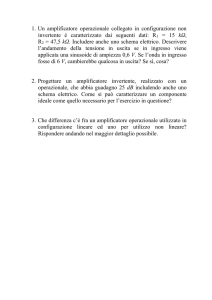
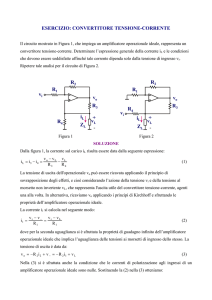
Qualunque sia il tipo di involucro utilizzato per amplificatore operazionale, lo schema
circuitale di riferimento è sempre lo stesso:
V1
V2
–
+Vcc
V0
+
-Vcc
Nello schema circuitale i due terminali di Offset non appaiono (e talvolta non si indicano nemmeno i terminali di alimentazione) in quanto vengono utilizzati solo raramente e per migliorare il comportamento in modo comune del amplificatore.
Una prima considerazione elementare che occorre fare per un amplificatore differenziale è la seguente: rispetto a cosa viene amplificata l'uscita?
Vo difatti è un segnale che non è differenziale e pertanto deve fare riferimento a una
tensione comune.
Possiamo schematizzare il comportamento elettrico di un amplificatore differenziale
con la seguente relazione:
V 0ut =
V plusV minus
A sV INplus −V INminus
2
Dove A(s) è la funzione del guadagno >>1 in continua e con un polo a bassa frequenza. Il prodotto frequenza polo x guadagno in continua prende nome di prodotto guadagno banda ed è una delle caratteristiche prestazionali di un amplificatore differenziale:
A0
A s =
, dove Ao risulta dell'ordine di 10^6, mentre po di qualche decina di
1 p 0
Hertz. Il prodotto guadagno banda ci indicherà una delle caratteristiche più rilevanti di
un operazionale. Vale a dire, quanto più cercheremo di amplificare con un dispositivo
di questo genere, tanto più, perderemo di risposta in frequenza.
Prima di vedere le utilizzazioni più comuni di un operazionale, richiamiamo due regole d'utilità per l'analisi dei circuiti associati:
1. Impedenza d'ingresso infinita: abbiamo visto che è una approssimazione ma in
buona parte dei casi le gli assorbimenti dello stadio di ingresso si possono considerare nulli rispetto alle correnti in gioco;
2. Corto circuito virtuale. Quando gli operazionali vengono utilizzati in retroazione negativa per la stabilizzazione della corrente in uscita, il guadagno di
anello risulta essere così elevato da ridurre pressoché a zero la differenza di
potenziale agli ingressi differenziali. È quello che si chiama, corto circuito virtuale, perché la differenza di tensione è zero ma non vi scorre corrente.
3. Impedenza di uscita nulla: lo stadio di uscita è caratterizzato da uno stadio di
tipo push-pull tipico di amplificatori in classe B. L'impedenza che si vede
quindi è pari a quella del canale (aperto) dei BJT, valori tipici sono di qualche
decina di ohm.
Configurazioni tipiche di uso
L'impiego più naturale, anche se non il più diffuso di un'amplificatore operazionale, è
quello in configurazione non invertente indicato nella seguente figura:
Ri
Vi
Ii
R
I0
R0
Ib1
V1 -
V2
+
V0
L'ingresso del segnale viene collegato al terminale di ingresso positivo tramite una resistenza (fittizia), mentre una retroazione sull'ingresso viene creata da Vout a V1 tramite un partitore verso massa.
Per analizzare il circuito, utilizzeremo le regole definite in precedenza. Se il circuito è
stabile, ovvero la retroazione negativa funziona, allora sarà: V1= V2, per cui Vo si
può ricavare dalla regola del partitore.
V o =V 2 1
Ro
Ri
ovvero volendo assumere le relazioni di cui sopra:
{
V 0= As V 1−V 2
R
V 0=V 1 1 o
Ri
dove per comodità abbiamo assunto essere a media nulla l'alimentazione. Eliminando
la variabile di tensione interna otteniamo:
[
A s Ri
−1] V 0=− As V 2
RiR o
Che nel caso di grosse amplificazioni si riconduce alla prima. Vale la pena fare alcune
considerazioni:
1. L'amplificatore invertente ha guadagno almeno pari a 1;
2. Il guadagno dell'operazionale non è significativo nel determinare il guadagno
complessivo;
3. lo stesso dicasi per la resistenza di ingresso (almeno da un punto di vista statico/quasi statico). Da un punto di vista dinamico è invece consigliabile che essa
sia pari al parallelo delle altre due resistenze. i.e. Alla resistenza vista all'altro
ingresso;
4. Il caso estremo di Ri=∞ e R0=0 , è un caso abbastanza tipico, e corrisponde ad una condizione di amplificazione unitaria, definita buffer. In un
buffer la tensione di uscita insegue esattamente la tensione di ingresso, mentre
l'impedenza di uscita è pressoché nulla, l'impedenza di ingresso è circa infinita. Questa situazione può servire a disaccoppiare il comportamento di stadi circuitali evitando che correnti e tensioni possano modificare gli stadi precedenti.
In termini di controllo uno stadio è una situazione ideale per trasformare una
f.d.t in un sistema in cui l'uscita non ha più effetto sull'ingresso.
L'utilizzo della configurazione non invertente ci porta ad una prima idea di composizione delle finzioni di trasferimento ottenute tramite reti elettriche. La proprietà di
questi buffer di apparire infatti come generatori di tensione in uscita e di offrire una
impedenza di ingresso infinita, in questa configurazione ci consente di prelevare e riprodurre i segnali elettrici generati in una rete senza per questo alterare il comportamento della rete stessa.
Se quindi scompongo il comportamento di un sistema di controllo in un prodotto di
fratti semplici (propri, del primo o del secondo ordine) so di poter realizzare i singoli
fratti tramite reti elettriche elementari e di poter moltiplicare detti fratti interponendo
dei buffer tra le reti.
La configurazione invertente:
Consideriamo ora il seguente schema, rispetto al precedente manteniamo la retroazione sull'ingresso negativo (cosa obbligatori per avere un comportamento stabile del dispositivo), ma ora anziché collegare l'ingresso a massa, lo usiamo come ingresso e
colleghiamo a massa l'ingresso positivo:
Ri
Vi
Ii
R
I0
Ib1
V1
Ib2 V2
R0
+
V0
Come per la configurazione non invertente si usa mettere una resistenza aggiuntiva
sull'ingresso collegato verso massa. Questa resistenza, il cui valore non comparirà nelle equazioni descrittive semplificate, si utilizza per motivi di migliorare le prestazioni
dinamiche del nostro amplificatore, il suo valore si pone uguale alla resistenza vista
all'altro terminale. In questo modo infatti, entrambi i terminali di ingresso vedono la
stessa resistenza per cui lo stadio di ingresso dell'operazione si comporta in maniera
equilibrata.
Potremo derivare le equazioni di questa rete utilizzando lo stesso metodo visto in precedenza e poi procedendo a semplificare gli elementi non significativi. Tuttavia se applichiamo le regole viste sopra giungiamo senza conti alla stessa conclusione:
1. Impedenza di ingresso infinita ==> Ib1 = 0.
2. Corto circuito virtuale V1=V2 = 0;
Per cui saputa la tensione di V1, determino Ii= Vi/Ri. Ed ovviamente scorrendo tutta
la corrente in Ro, avrò:
Vo = -Ro/Ri Vi.
L'amplificatore invertente guadagna esattamente come il rapporto delle impedenze di
ingresso e di retroazione.
Zinput
Zfeedback
Guadagno
Tipo
Ri
Ro
−Ro
Ri
Guadagno ideale
1
s Ci
Ro
−s C i R o
Derivatore ideale con
guadagno
Ri
1
s Co
−
1
s C o Ri
Integratore Ideale
sLi
Ro
−
Ro
sLi
Altro integratore ideale
Ri
sLo
−
sL o
Ri
Derivatore ideale
Ri
sC i Ri1
Ro
−
Ro
1sC i Ri
Ri
Controllore proporzionale derivativo
Ri
Ro
sC o Ro1
−
Ro
1
Ri s C o R o1
Guadagno con filtro
passa basso
Ri
RosL o
Ri
sC i Ri1
RosL o
Ri
sC i Ri1
Ro
sC o Ro1
−
Ro
L
s o
Ri
Ri
− s 2 C i L os
−
Controllore proporzionale derivativo
C i Ri R oL o R o Controllore PDD2
Ri
Ri
Ro s C i Ri 1
Ri s C o R o1
Rete anticipo/ritardo
con guadagno. Coppia
Polo/zero
Ovviamente questi schemi si possono tutti comporre per ottenere schemi più complessi, tuttavia anche nella regola di composizione dovremo stare attenti ad alcuni particolari:
● Il meccanismo di funzionamento degli amplificato operazioni è lineare fino a
tensioni di ingresso/uscita prossime a quelle di alimentazione fuori da questi
range, fenomeni di saturazione non assicurano più il corretto comportamento
del sistema;
●
●
●
Nel comporre a cascata i sistemi dovremo pertanto se necessario decomporre
la funzione in maniera da verificare che i segnali trattati siano sempre entro i
limiti della saturazione;
Derivatori puri non esistono in quanto sono sistemi a fase non minima e non
fisicamente realizzabili, per cui è lecito immaginare che il comportamento dei
sistemi di cui sopra (derivati con la regola del corto circuito virtuale), non sia
quello presunto, ma che su frequenze alte, si inneschino dei comportamenti
non ideali del opamp che cambiano la funzione di trasferimento.
Essendo questa una caratteristica non predicibile e variabile a seconda del modello di operazionale impiegato, è buona prassi nella realizzazione di questi sistemi sostituire i derivatori ideali con dei sistemi (polo/zero) realizzabili che si
comportano come derivatori nella banda di interesse.
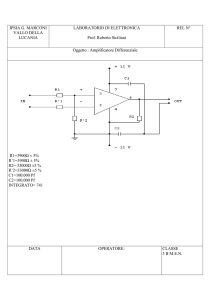
Configurazione differenziale
in alcuni casi è necessario amplificare con elevate precisione segnali analogici differenziali molto piccoli, per i quali il guadagno deve essere molto elevato. In tal caso
l'amplificatore differenziale non risulta essere indicato sia considerato nella configurazione invertente che non.
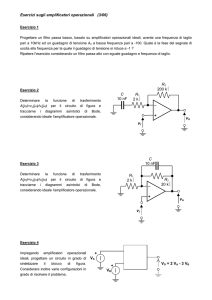
In questi casi si ricorre ad una configurazione particolare in grado di amplificare segnali anche piccolissimi, mentre il consumo di corrente in ingresso è pressoché nullo.
Le uscite di due amplificatori differenziali sono collegate in parallelo tramite la serie
di una triade di resistenze di cui quelle esterne devono essere uguali (da scegliersi con
la massima precisione possibile). Le resistenze esterne inoltre entreranno a far parte
della retroazione negativa sugli ingressi in maniera da assicurare l'inseguimento e
l'amplificazione degli ingressi positivi.
I due ingressi positivi sono invece utilizzati come input per il segnale differenziale.
Un esempio della configurazione descritta è mostrato nella figura seguente:
Dette Rf le resistenze di feedback e Rp la resistenza del parallelo tra i due operazionali, per il principio del corto circuito virtuale la differenza di potenziale agli estremi di
Rp sarà pari alla tensione differenziale in ingresso e pertanto per la serie delle tre resistenze si può calcolare la tensione di uscita come
Vout = (2Rf+Rp) Vin
Per il corretto funzionamento di un amplificatore differenziale per strumentazione
come questo sarà necessario oltre ad avere le due resistenze Rp molto ad alta precisione, poter disporre di due amplificatori differenziali soggetti alla stessa tensione di alimentazione, con lo stesso prodotto guadagno banda e con la stessa capacità di reiezione al modo comune. Per ottenere amplificatori di questa specie, si trovano sul mercato
dei chip integrati con due operazionali sullo stesso chip (come ad esempio l'OP177).