ENERGIA CINETICA DI ROTAZIONE
1
Ek = ∑ mi vi2
i 2
vi = ω Ri
Ek =
1
1
2
2
m
R
ω
=
(∑ mi Ri2 ) ω 2
∑i 2 i i
2 i
Espressione generica dell’energia cinetica di rotazione:
Ek =
1 2
Iω
2
Se la rotazione avviene intorno ad un asse principale d’inerzia,
allora:
L = Iω
da cui:
Ek
L2
=
2I
ENERGIA CINETICA DI ROTOTRASLAZIONE
Nel caso generale in cui il corpo rigido ruota attorno ad un asse
passante per il suo centro di massa e nel contempo trasla rispetto
all’osservatore, si ha:
Ek = Ek ,t + Ek ,r =
1
1
M vC2 + I C ω 2
2
2
TEOREMA LAVORO-ENERGIA CINETICA
CONSERVAZIONE DELL’ENERGIA PER UN CORPO RIGIDO
In un corpo rigido l’energia potenziale interna rimane costante;
cioè:
W int = 0
Per il teorema dell’energia cinetica:
Ek , f − Ek ,i = W = W ext + W int = W ext
Se le forze esterne sono conservative:
W ext = E pext,i − E pext, f
Ek ,i + E pext,i = Ek , f + E pext, f = cost.
E=
1
1
M vC2 + I C ω 2 + E pext = cost.
2
2
UN ESEMPIO NOTEVOLE DI MOTO ROTOTRASLATORIO:
ROTOLAMENTO PURO
In genere il moto rotatorio e quello traslatorio di un corpo sono
indipendenti l’uno dall’altro.
Esiste tuttavia un interessante caso particolare: il rotolamento puro.
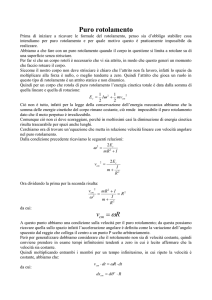
Moto di una ruota - Il punto sul bordo della ruota descrive una
curva detta cicloide.
Rotolamento puro (rotolamento senza strisciamento) E’ il moto
di un oggetto che rotola su una superficie in modo tale che non vi
sia moto relativo tra la parte dell’oggetto che tocca la superficie e
la superficie stessa.
Esso è un particolare moto rototraslatorio caratterizzato da una
velocità di trascinamento del punto istantaneo di contatto tra corpo
e superficie pari a zero
Moto di rotolamento puro
⇓
Presenza di attrito radente statico tra corpo e superficie
Questa forza d’attrito non compie lavoro sul corpo perché il
punto d’applicazione della forza non si muove.
Una ruota ideale soggetta ad una forza risultante nulla continua a
rotolare (purché non strisci) mantenendo costanti le sue velocità
traslazionale e rotazionale.
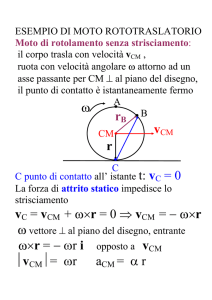
(a) Moto puramente traslatorio. (b) Moto rotatorio intorno a C. (c) Moto di puro
rotolamento (vB = 0).
Rototraslazione generica: (a) + (b)
vT = vCM xˆ + ω R xˆ = (vCM + ω R) xˆ
vC = vCM xˆ + 0 xˆ = vCM xˆ
vB = vCM xˆ − ω R xˆ = (vCM − ω R) xˆ
Rotolamento puro: (a) + (b) tale che vB = 0; quindi:
vCM = ω R
da cui:
vC = vCM xˆ
vT = (vCM + ω R ) xˆ = 2 vCM xˆ
Descrizione alternativa: il corpo in puro rotolamento ruota istante
per istante intorno ad un asse passante per B (punto istantaneo di
contatto) e perpendicolare al diametro BT. Tale asse è chiamato
asse istantaneo di rotazione. La velocità angolare della rotazione
intorno a B è uguale alla velocità ω della rotazione intorno al
centro di massa.
ENERGIA CINETICA DEL MOTO DI ROTOLAMENTO PURO
Ek =
1
1
1
1
M vC2 + I C ω 2 = M ω 2 R 2 + I C ω 2
2
2
2
2
Per il teorema di Huygens-Steiner:
I B = M R2 + IC
con IB momento di inerzia del corpo rispetto all’asse istantaneo di
rotazione.
Quindi:
1
Ek =
IB ω 2
2
EQUILIBRIO DI UN CORPO RIGIDO
Condizione necessaria e sufficiente affinché un corpo rigido in
una data posizione sia in equilibrio è che in tale posizione siano
nulli la risultante ed il momento risultante delle forze esterne
applicate al corpo stesso.
Prima equazione cardinale:
dv c
M
= 0
dt
Seconda equazione cardinale:
dL
=0
dt
EQUILIBRO DI UN CORPO APPOGGIATO AD UN PIANO
ORIZZONTALE RIGIDO:
CONSIDERAZIONI DINAMICHE
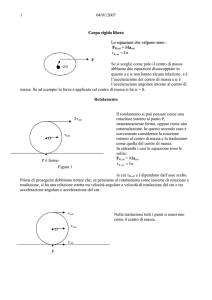
Si definisce perimetro di appoggio la poligonale che definisce il
contorno della base di appoggio di un corpo su un piano. La
reazione vincolare è confinata in tale perimetro.
Il sistema a è in equilibrio. Il sistema b non è in equilibrio. Il
sistema c è in equilibrio, a causa della presenza del vincolo in A.
EQUILIBRO DI UN CORPO APPOGGIATO AD UN PIANO
ORIZZONTALE RIGIDO:
CONSIDERAZIONI ENERGETICHE
Richiamo delle condizioni di equilibrio per una particella
(a) Funzione energia potenziale di una data particella. (b) Componente x
della forza associata all’energia potenziale sopra descritta.
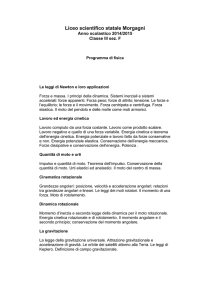
Condizioni di equilibrio per un corpo rigido
(a)
(b)
(c)
(a) Equilibrio stabile: il baricentro del corpo si innalza se il cubo viene
inclinato da una forza orizzontale F. (b) Equilibrio instabile: il baricentro
di un cubo bilanciato su un vertice si abbassa se il corpo viene inclinato da
una forza F. (c) Equilibrio indifferente: il baricentro della sfera non si alza
né si abbassa se sulla sfera agisce una forza orizzontale F.
Definizioni generali
Equilibrio stabile: se spostato di poco dalla posizione di equilibrio
il corpo torna spontaneamente nella posizione iniziale.
Il baricentro del corpo vincolato si trova nella più bassa posizione
consentita dal vincolo (minima energia potenziale gravitazionale).
Equilibrio instabile: se spostato di poco dalla posizione di
equilibrio il corpo tende ad allontanarsi dalla posizione iniziale.
Il baricentro del corpo vincolato si trova nella più alta posizione
consentita dal vincolo (massima energia potenziale
gravitazionale).
Equilibrio indifferente: qualsiasi spostamento permesso dal
vincolo porta sempre ad una posizione di equilibrio. Il vincolo è
tale da non consentire variazioni di quota del baricentro (energia
potenziale gravitazionale costante).