Capitolo 3
I campi
Introduzione
A questo punto abbiamo appreso le regole necessarie per calcolare il moto di punti
materiali e corpi rigidi. Dobbiamo adesso studiare le forze esistenti in natura e calcolare
alcuni particolari moti per riuscire a descrivere sistemi fisici di notevole importanza. In
effetti, il problema centrale di tutta la fisica moderna è proprio quello di studiare queste
forze, o interazioni fondamentali. Sono quattro le interazioni fondamentali identificate
fino ad oggi. I. Newton riuscì a stabilire la legge fondamentale della gravità. Poco dopo,
Coulomb diede la forma dell’interazione elettrostatica. Come vedremo, queste due
interazioni risultano formalmente quasi identiche. In seguito, anche le forze generate da
un campo magnetico sono state descritte da una formula, ma - ancora più importante - le
forze elettriche e magnetiche sono state unificate in un unico grande schema. Questa
unificazione fece pensare che anche la gravità dovesse entrare in uno schema più generale,
dove l’apparente differenza tra elettromagnetismo e gravità fosse cancellata. La gravità
venne riformulata da A. Einstein nella sua Relatività Generale. In questa teoria, la gravità
diventa una proprietà geometrica dello spazio. Utilizzando geometrie non euclidee è
possibile introdurre la nozione di curvatura dello spazio. In uno spazio curvato dalla
presenza di masse, altre masse sono costrette a muoversi sotto l’effetto di questa
curvatura. Un primo tentativo di grande unificazione fu fatto da H. Weyl, che provò a
reinterpretare anche l’elettromagnetismo come una proprietà geometrica dello spazio.
Klein e Kaluza provarono invece a descrivere l’elettromagnetismo come dovuto ad una
quarta dimensione spaziale. La scoperta di due altre interazioni fondamentali (quella forte
e quella debole nell’ambito della fisica nucleare), ampliò il problema e mise in evidenza la
necessità di unificare non due, ma ben quattro interazioni. Una teoria unificata è stata
sviluppata negli anni Settanta ed include l’elettromagnetismo (nella versione quantistica o
Quantum Electrodynamics, QED) e le interazioni deboli e forti. Questa teoria è stata
convalidata da numerose verifiche sperimentali. Tuttavia non è completa, ed il problema
di proporre una teoria unificata che comprenda anche la gravità è sempre attuale.
Nel seguito noi ci occuperemo esclusivamente della gravitazione universale nella
formulazione di I. Newton e dell’elettromagnetismo classico.
1.
La gravitazione universale
Come è generalmente noto, durante tutto il Medio Evo prevalse un modello geocentrico
del cosmo. Questo modello, elaborato dall’astronomo alessandrino Claudio Tolomeo
(100-175), fu associato al sistema filosofico aristotelico∗ e divenne la teoria scientifica
ufficiale: pensarla diversamente poteva costare caro! Tuttavia, alla fine del Rinascimento,
N. Copernico (1473-1543) formulò un sistema eliocentrico che sostituì il sistema
tolemaico. Successivamente, dopo avere studiato i dati disponibili sul moto del pianeta
∗
Aristotele sostenne infatti il sistema geocentrico nell’opera De coelo. Si veda per
esempio: Aristotele, Opere, Biblioteca Universale Laterza, Vol. 3.
Cap. 3 – I campi
________________________________________________________________________
Marte, J. Keplero (1571-1630) sostenne quantitativamente il sistema copernicano,
asserendo che le orbite dei pianeti erano ellissi, non cerchi! e che il Sole era situato in uno
dei due fuochi. Keplero formulò tre leggi che studieremo nel prossimo capitolo. G. Galilei
apportò non poca acqua al mulino copernicano, costruendo un telescopio con il quale
scoprì i satelliti di Giove (Sidereus Nuncius, 1610). Questa scoperta dimostrò pertanto che
non tutto girava intorno alla Terra. La successiva osservazione delle fasi di Venere, provò
che quest’ultima doveva necessariamente girare intorno al Sole. Infine, la scoperta che la
superficie solare, come quella della Luna del resto, era piena di macchie ed altri difetti
permise a Galileo di dimostrare che queste non erano le superfici di corpi celesti perfetti!
Alle tre leggi di Keplero mancò una giustificazione teorica fino a che I. Newton non
stabilì la sua legge della gravitazione universale. Concettualmente, il primo passo fu di
concepire l’idea che, se un pianeta girava intorno al Sole, lo faceva perché soggetto ad una
forza di attrazione verso il Sole. Questo può oggi sembrare banale perché fa parte del
nostro bagaglio culturale, ma si deve tenere presente che fino a poco tempo prima il moto
dei pianeti intorno alla Terra veniva concepito come generato dallo sforzo di entità
soprannaturali (Angeli)∗. Tuttavia, la forza universale di Newton mantiene alcune
caratteristiche poco convincenti. Essa si propaga in tempi nulli o con velocità infinita.
Poichè non c’è contatto tra i corpi, come può un corpo esercitare una forza su di un altro?
Insomma questa forza a distanza appare alquanto metafisica. Malgrado ciò, però, la
gravitazione universale fu un grande progresso. Anche la descrizione della forza
elettrostatica, che vedremo nel prossimo paragrafo, seguì dapprima lo stesso schema di
una forza a distanza. Nel seguito, però, si tenderà ad attribuire alla regione di spazio
intorno ad una carica elettrica, una esistenza autonoma (M. Faraday) e si potrà definire
formalmente un campo elettrostatico come una proprietà dello spazio circostante le
cariche elettriche: una proprietà dell’etere che, come si è detto, permeerebbe tutto lo
spazio vuoto. Più tardi il concetto di etere dovrà essere abbandonato, ma quello di campo
permarrà e potrà essere retroattivamente applicato alla gravitazione.
Dunque, se il Sole, o più in generale una qualsiasi massa, esercita una forza a distanza su
altre masse, quello che vogliamo sapere è quanto sia grande questa forza e da cosa
dipenda. Le quantità fisiche in gioco sono poche perché si può immaginare che la forza
vari con la distanza e con qualche proprietà dei corpi che si attirano. La quantità di
materia di un corpo, per esempio, avrà un effetto, perché ci si può aspettare che un corpo
grande eserciti una forza maggiore di un corpo piccolo. Occorre però definire che cosa si
intenda con termini imprecisi come “piccolo” o “grande” o “quantità di materia”, ecc... Il
primo passo effettuato da Newton fu la scoperta della dipendenza della forza di gravità
dalla distanza tra due corpi. Poiché Galilei aveva già puntualizzato che i corpi cadono con
una accelerazione che non dipende dalla loro massa, si può dedurre che la forza di gravità
dipenda direttamente dalla massa dei corpi. Detta g l’accelerazione di un corpo che cade
attratto dalla Terra, la forza con la quale la Terra lo attrae è proporzionale alla sua massa
∗
“La gloria di Colui che tutto move” e “l’amor che muove il sol e l’altre stelle” dice
Dante nel primo e nell’ultimo verso del Paradiso. Pare che il primo a lanciare l’idea che
fossero gli angeli a muovere i cieli, fosse tal Cosma Indicopleuste (“navigatore indiano”)
nella “Topografia Cristiana”, scritta tra il 535 e il 547.
2
Cap. 3 – I campi
________________________________________________________________________
m. Se la forza è F=mg, allora l'accelerazione è uguale per tutti i corpi. Infatti dal secondo
principio della dinamica segue che F=mg=ma e dunque a=g indipendentemente da m. Si
può ragionevolmente supporre dunque che F dipenda non solo dalla massa del corpo che
cade, ma anche da quella della Terra. Il moto di caduta del corpo infatti deve essere
collegato ad un analogo moto della Terra verso il corpo, a causa del terzo principio della
dinamica. Dunque dovrà essere F ≈ mM T , dove MT è la massa della Terra. Occorre
adesso capire come la forza d’attrazione vari con la distanza tra due corpi. Newton fece il
seguente ragionamento. Se un corpo sulla superficie della Terra è soggetto ad
un’accelerazione g, allontanandosi dalla superficie terrestre lo stesso corpo sarà soggetto
ad un’accelerazione inferiore, ma ugualmente universale. Noi però conosciamo un corpo
che ruota e dunque è accelerato dalla forza gravitazionale della Terra: la Luna. Dunque la
Luna avrà un valore dell’accelerazione determinato dalla distanza Terra-Luna R (che
all’epoca di Newton era nota, essendo stata misurata con il metodo della parallasse in
unità del raggio terrestre). Il periodo di rotazione della Luna intorno alla Terra è:
2πR
T=
dove v L è la velocità della Luna lungo la sua orbita. Del resto v L è correlata a
vL
g',
l’accelerazione della Luna, perché, per il secondo principio, deve essere:
vL2
. Eliminando la massa della Luna M L ai due membri, si ottiene:
R
R
ovvero:
v L = g ' R e sostituendo nella formula del periodo, avremo: T = 2π
g'
R
g ' = 4π 2 2 . Noti R e T si può calcolare g' e si può anche verificare che l'accelerazione di
T
gravità dipende dal quadrato della distanza, avendo in gioco due distanze: il raggio della
6
Terra ( RT = 6, 400 ⋅10 m ) associato al valore g=9,81m/s2 e la distanza Terra-Luna (
M L g' = M L
RTL = 3,84 ⋅108 m ) associata al valore di g ' = 2,59 ⋅10−3 m / s 2 , appena calcolato. In
conclusione, generalizzando al caso di due masse generiche ad una distanza r, si trova
mM
che: F ≈ 2 Poiché occorre tenere in considerazione le unità di misura, nel sistema SI
r
mM
risulta: F = G 2 , dove G, costante della gravitazione, ha il valore:
r
G = 6,67 ⋅10 −11 N ⋅ m 2 / kg 2
Da notare che l’accelerazione di gravità alla superficie della Terra sarà pari a: g = G
MT
RT2
, dove M T e RT sono rispettivamente la massa della Terra ed il suo raggio.
Pur non essendo possibile effettuare una misura diretta della forza Luna-Terra, Newton,
riuscì a ricavare la sua legge della gravitazione universale utilizzando il risultato di misure
3
Cap. 3 – I campi
________________________________________________________________________
già fatte nel passato. Nel Settecento, H. Cavendish∗, utilizzando la bilancia di torsione
inventata da Michel e usata anche da C.A. Coulomb per misurare le forze elettrostatiche
(vedi oltre), riuscì a misurare la reciproca forza di attrazione tra due sfere di piombo, di
massa e a distanza note e dunque G. Così facendo, offrì una verifica diretta della legge di
Newton. Da notare che misurare G equivale a misurare la massa della Terra a norma della
relazione che lega la costante g a G, alla massa della Terra e al suo raggio. Risulta così
che la massa della Terra è: M T = 5,98 ⋅10 24 kg . Naturalmente la forza è un vettore e la
direzione di questa forza è la direzione della congiungente dei centri dei due corpi che si
attraggono. Il verso deve essere quello di una forza di attrazione. Per esempio, la forza di
attrazione Terra-Sole è rappresentata in fig. 1.
k
M
m
r
F
Fig. 1: Forza di attrazione tra due corpi di massa m ed M (per esempio, Terra e Sole).
La forza agente su m può essere scritta come: F = −G
Mm
r
il versore lungo la congiungente le due masse puntiformi.
2
k = −G
Mm r
r
, dove k = è
2 r
r
r
Nel capitolo precedente abbiamo già notato la straordinaria coincidenza che fa sì che la
massa inerziale - cioè la quantità di materia che appare nel secondo principio della
dinamica - e la massa gravitazionale - quella che appare nella legge della gravitazione
universale - siano numericamente uguali∗. La fisica classica non sa dare una spiegazione
soddisfacente del perché si verifichi questa coincidenza numerica tra due quantità
concettualmente diverse. A. Einstein si rese conto che come conseguenza dell’uguaglianza
tra massa inerziale e massa gravitazionale, si aveva anche un’uguaglianza di
comportamento tra forza gravitazionale e forze non inerziali. Un sistema in cui appare un
campo gravitazionale ed un sistema in accelerazione sono dunque equivalenti.
Supponiamo di effettuare un esperimento ideale in cui una persona si trova all’interno di
un ascensore. Se l’ascensore è fermo, noi sentiamo che appoggiamo il nostro peso sul
pavimento dell’ascensore. Se l’ascensore cominciasse a cadere ci accorgeremmo subito
che non poggiamo più il nostro peso. Ci dovremmo allora domandare se qualcuno ha
“spento” il campo gravitazionale terrestre oppure se l’ascensore cade liberamente (e noi
con esso).
Possiamo pensare ad un esempio più moderno. Tutti abbiamo visto un film di astronauti in
una navicella spaziale in orbita intorno alla Terra. Gli astronauti sembrano non risentire
∗
Chi volesse ulteriori dettagli sul'esperimento di Cavendish, può trovarli in: M. H.
Shamos, Great experiments in Physics, Dover.
∗
Misura di R. Eötvos (1848-1919) con bilancia di torsione: le due masse risultano uguali
entro parti in 109.
4
Cap. 3 – I campi
________________________________________________________________________
più dell’attrazione terrestre e galleggiano a mezz’aria, se non sono in qualche modo
trattenuti. Che la navetta spaziale sia soggetta all’attrazione terrestre - e con essa gli
astronauti - è però evidente. Dunque dovremmo vedere gli astronauti cadere. Il fatto è che
ciò è esattamente quello che accade: tanto gli astronauti che la navicella nella quale si
trovano cadono liberamente nel campo terrestre, ma poiché cadono con la stessa
accelerazione, nel riferimento della navicella essi non sembrano cadere. Nel riferimento
della navetta, l’attrazione di gravità è scomparsa! O piuttosto l’accelerazione che il
sistema navetta spaziale subisce a causa dell’attrazione terrestre è equivalente al campo
terrestre. Gli astronauti però si raffrontano al loro sistema e ritengono che il campo
gravitazionale terrestre sia stato “spento”.
Seguendo quanto abbiamo detto nel primo capitolo e cioè che la geometria di un sistema
accelerato non può essere euclidea, Einstein ne fece seguire che neppure la geometria di
una regione di spazio in cui è presente un campo gravitazionale (dunque tutto l’universo
in linea di principio) può essere euclidea. La teoria della relatività generale dunque
includerà sullo stesso piano i sistemi accelerati eliminando allora la distinzione tra sistemi
inerziali e non e, seguendo le idee di E. Mach, sarà formulata sulla base di uno spazio non
euclideo, cioè di uno spazio dotato di una curvatura (come una sfera) in quattro
dimensioni, includendo il tempo su di una base di parità con le coordinate spaziali. Poiché
dal raffronto di orologi in un sistema in moto circolare abbiamo visto che esiste un tempo
che cambia con il raggio, cioè con la forza centrifuga, ne segue che il tempo locale
dipenderà anche dal campo gravitazionale.
La presenza di masse (come i corpi celesti) provoca delle deformazioni nello spazio
tempo che dobbiamo saper calcolare. Le traiettorie dei corpi saranno determinate appunto
da queste deformazioni. Gli stessi coefficienti che danno le deformazioni dello spazio
potranno modificarsi col tempo e sarà dunque possibile un’espansione dello spazio, come
vedremo nel prossimo capitolo, espansione peraltro molto diversa da quella prevista nel
modello newtoniano. Purtroppo l’apparato matematico utilizzato dalla Relatività Generale
è piuttosto complesso e non ci consente di entrare in maggiori dettagli.
2.
La forza elettrostatica
Sin dall’antichità1 erano noti fenomeni di triboelettricità (elettrizzazione per strofinio). Se
si strofina un bastoncino di ambra (dal cui nome in greco, ηλεκτρον, prende il suo nome
l’elettrone), ma anche di plastica (il corpo di una penna a sfera va benissimo) su un panno
di lana o su una pelliccia si nota che esso assume la capacità di attrarre piccoli corpi
leggeri, come pezzetti di carta, o di legno di sambuco, ecc...
Una serie di esperienze fatte nel Seicento mostrarono che esistono due tipi di elettricità,
chiamate positiva e negativa da B. Franklin (1706-1790), e che elettricità o cariche dello
stesso segno si respingono, mentre cariche di segno opposto si attraggono. Facile
immaginare come si potessero verificare questi fatti. Elettrizziamo per strofinio due pezzi
di ambra e notiamo che i due pezzi si respingono. Per esempio, possiamo sospenderli
dall’alto e notare che la loro posizione d'equilibrio non è quella in cui i fili di sospensione
sono verticali. Dalla deviazione dalla verticalità si può in effetti misurare la forza di
repulsione esistente. Possiamo anche prendere un materiale che può cedere facilmente la
1
5
Sembra che già Talete di Mileto nel 6° secolo a. C conoscesse il fenomeno.
Cap. 3 – I campi
________________________________________________________________________
sua carica, metterlo in contatto con un altro pezzo di materiale identico e verificare che
una parte della carica del primo è passata al secondo corpo, in quanto anche quest’ultimo
risulta elettrizzato. Possiamo verificare di nuovo che i due corpi si respingono. Viceversa
alcuni materiali, elettrizzati separatamente, si attraggono. Quello che occorre fare a questo
punto è mettere in relazione carica, distanza tra le cariche e forza. Precisiamo un paio di
cose.
• La distanza tra due corpi elettrizzati (tra due masse gravitazionali), può essere definita
solo se i due corpi sono puntiformi: la distanza è infatti definita tra due punti. E'
chiaro che in un esperimento reale occorre prendere corpi di dimensioni non nulle.
Per esempio nell’esperimento di Cavendish era importante avere masse grandi e
dunque corpi grandi e possibilmente densi, cioè che a parità di volume avessero
grande massa. Se si prendono corpi sferici si può comunque definire la distanza tra i
due corpi come la distanza tra i centri delle sfere. A posteriori, si può inoltre
verificare che due sfere si comportano ai fini elettrici e gravitazionali come due punti
con massa o carica concentrate nel centro della sfera. Nel discutere come Newton
avesse derivato la legge della gravitazione universale, questa proprietà era stata
lasciata inespressa.
• Si è usata la parola “carica”. Questa è propria di una terminologia moderna.
Sappiamo infatti che la materia è formata da due particelle cariche ed una senza
carica (il neutrone). Una delle particelle cariche è l’elettrone (negativo) e l’altra è il
protone (positivo). L’elettrizzazione di un corpo si produce facendo passare una parte
della carica inizialmente posseduta da un corpo neutro (cioè con eguale ammontare di
carica positiva e negativa) ad un altro corpo neutro. Così facendo alla fine entrambi i
corpi saranno caratterizzati da un eccesso di carica di segno opposto. Prima che la
carica fosse così definita, si era, per esempio, pensato ad un flusso di qualcosa che
passava da un corpo all’altro o si erano fatti altri schemi. Questo tuttavia non aveva
cambiato sostanzialmente le cose. Se volete, una certa indefinizione delle cause dei
fenomeni non aveva impedito di fare progressi*.
La forza F tra due corpi elettrizzati fu misurata per primo da C.A. Coulomb (1736-1806),
nel 1777, usando la bilancia di torsione. Quest’ultima è uno strumento di misura delle
forze, basato sul bilanciamento tra una forza elastica (ottenuta torcendo un filo sottile) e la
forza elettrostatica. La fig. 2 illustra l’idea.
1 qQ
k , dove r è la
Il risultato di Coulomb si può esprimere con la formula: F =
4πε 0 r 2
distanza tra le due cariche puntiformi (ovvero tra i centri delle due sferette), q e Q sono le
1
cariche,
fa lo stesso ufficio della costante G presente nella legge della gravitazione
4πε 0
universale e k indica che la forza ha come direzione la congiungente le due cariche. Il
*
Sul testo “Cours de Physique” di A. Boutan e J. Ch. D’Almeida, pubblicato a Parigi nel
1863, per esempio, si legge: “...De là les physiciens ont été conduits à admettre deux
espèces de fluide electrique. Ils sont apellé fluide vitré ou plus souvent negatif... et fluide
résineux ou positive...”.
6
Cap. 3 – I campi
________________________________________________________________________
verso può essere positivo o negativo a seconda che le due cariche siano dello stesso segno
(il prodotto qQ è maggiore di zero) o negativo. Anche qui parecchi commenti sono
necessari.
7
Cap. 3 – I campi
________________________________________________________________________
La bilancia di torsione di Coulomb
Sfera carica fissa
Filo la cui torsione misura
il momento della forza F
Forza elettrostatica F
Sfera carica mobile
Fig. 2: Misura delle forze tra due corpi carichi con la bilancia di torsione.
•
•
•
8
L’esperimento ha senso solo se la forza tra cariche puntiformi e quella tra cariche
sferiche è la stessa. Per provare ciò, si possono fare esperimenti con sferette di vario
raggio e verificare che la forza non dipende dal raggio delle sfere. A questo punto si
può estrapolare al caso di raggio zero.
Le cariche che appaiono al numeratore della formula di Coulomb non sono facili da
definire. Quello che si può fare è trovare una metodologia che consenta di dividere
una carica a metà, ad un quarto, ecc... Se si riesce a fare questo, allora si potrà
verificare che a metà carica corrisponde metà forza, e così via. Del resto, data una
sferetta metallica carica, la possiamo mettere in diretto contatto con un’altra sferetta
identica e, quando osserviamo che la seconda sferetta si è caricata, supporre che
essendo geometricamente uguale alla prima avrà assorbito una carica tale da
dimezzare la carica sulla prima sferetta. Occorrerà in effetti esaminare il risultato di
vari esperimenti e fare delle ipotesi. Comunque il risultato finale è che occorrerà
eventualmente definire un’unità di carica.
L’unità di carica. Qui abbiamo diverse strade percorribili. La più logica sarebbe
quella di proporre come unità di carica quella che, posta a distanza unitaria da
un’altra identica, produca una forza unitaria. In tal caso il valore della costante di
1
proporzionalità della formula di Coulomb, scritta come
, varrebbe 1. È un
4πε 0
sistema che va bene per lavorare con le equazioni dell’elettrostatica perché le
semplifica non dovendosi costantemente scrivere il termine di proporzionalità. Sul
piano pratico però, il problema è che la riproducibilità di una carica campione del
genere non sarebbe semplice. Meglio allora cercare una carica facilmente
riproducibile. Chiaramente, dato che tutti gli elettroni hanno esattamente la stessa
carica, potremmo usare la carica dell’elettrone come carica unitaria. Tuttavia si
tratterebbe di un’unità piccolissima: ogni carica che viene realmente utilizzata
dovrebbe essere rappresentata da un numero enorme. L’unità di carica usata è il
Coulomb (C) che viene definito attraverso un procedimento (elettrolitico) che ne
garantisce la riproducibilità. Con questa unità, la carica di un singolo elettrone,
normalmente indicata con e, è pari a 1,6 ⋅10 −19 C . La carica di un Coulomb non è
enorme del resto. Tenete presente che la batteria di un telefonino può avere circa 1Ah
Cap. 3 – I campi
________________________________________________________________________
•
di capacità. Questo vuol dire che essa può sviluppare una carica pari a 3600
Coulomb. Scelto il Coulomb come unità di misura della carica il valore assunto dalla
1
costante di proporzionalità è:
= 0,899 ⋅1010 Newton ⋅ m 2 / C 2 = m / F . Il
4πε 0
simbolo “F” indica il “Farad” che è l’unità di capacità e verrà descritta più tardi.
Conseguentemente sarà: ε 0 = 8,854 ⋅ 10 −12 F / m . La costante ε 0 è chiamata la
costante dielettrica del vuoto (nella materia, la costante viene modificata da un fattore
moltiplicativo ε r , detto costante dielettrica relativa).
Come si vede la costante di proporzionalità della legge di Coulomb è enormemente
più grande di quella della legge di Newton. Ovvero le forze elettrostatiche sono molto
più intense di quelle gravitazionali. Se nel cosmo le forze elettrostatiche non giocano
un ruolo è perché i corpi celesti sono neutri ed a simmetria sferica. Prendiamo, per
esempio, due cariche di un Coulomb a distanza di 1cm = 10 −2 m : la forza
elettrostatica sarà pari a: F = 0,899 ⋅1014 Newton . Due masse da un chilo alla stessa
distanza eserciteranno una forza tra loro pari a F = 7 ⋅ 10 −7 Newton . Dunque
l’esperimento di Cavendish è sostanzialmente più difficile di quello di Coulomb. Non
è sorprendente che sia stato fatto dopo che la tecnica della bilancia di torsione è stata
messa a punto con le cariche elettriche.
3.
Il concetto di campo
Come è stato precedentemente spiegato, nella concezione Newtoniana le forze sono azioni
a distanza che si propagano senza un supporto materiale. Questo è spesso apparso come
un concetto strano: come fanno il Sole e la Terra ad interagire senza toccarsi? Molti hanno
immaginato lo spazio come riempito da un mezzo materiale, “l’etere”, caratterizzato da
determinate proprietà: una variazione di tali proprietà produce l’azione a distanza. Per
Einstein invece, l’etere non serve: sono le proprietà geometriche dello spazio, distorto
dalla presenza di masse a imporre alle particelle la traiettoria: la curva più breve tra due
punti, secondo la curvatura dello spazio, un segmento in uno spazio piatto. Comunque è
senz'altro possibile definire in ogni punto dello spazio una quantità che descriva l’azione
che una particella (dotata di carica o di massa) subirà in quel punto. E' chiaro infatti che in
prossimità di una distribuzione di carica (o di massa gravitazionale), un’altra carica
(massa) che chiameremo di prova sarà soggetta ad una forza F misurabile, per esempio,
con una bilancia di torsione o strumento equivalente. Ebbene possiamo dividere questa
forza per il valore della carica (massa) di prova - immaginata piccola per non disturbare la
distribuzione di cariche originali - e ottenere una quantità vettoriale come la forza e
definita (operativamente!) nella stessa zona di spazio in cui possiamo misurare la forza. Si
tratta di una quantità che però non dipende dalla carica di prova e dunque descrive solo lo
F
spazio intorno alla distribuzione di carica. Questa quantità: E =
è il campo elettrico,
q
che ha le dimensioni di una forza divisa per una carica. Analogamente per la gravitazione:
9
Cap. 3 – I campi
________________________________________________________________________
F
è il campo gravitazionale, che ha le dimensioni di un'accelerazione. Si tenga
m
presente che nel caso del campo elettrico il verso non è quello della forza se la carica a
denominatore è negativa.
Evidentemente il campo di una sola carica puntiforme Q , posta nell’origine, sarà quello
g=
dato della formula di Coulomb: E =
1
Q
4πε 0 r
2
k , dove k =
di una massa puntiforme M, avremo lo stesso: g = G
r
è il versore radiale. Nel caso
r
M
k . Poiché per le forze vale il
r2
teorema di sovrapposizione - se ad un punto si applicano più forze, la forza totale è la
risultante di tutte le forze applicate – allora, se più cariche producono un loro campo in un
punto, il campo totale sarà la somma di tutti i singoli campi. Varrà cioè per il campo lo
stesso teorema di sovrapposizione.
A questo punto possiamo porci i seguenti problemi:
1. Data una distribuzione di carica o di massa possiamo calcolare il campo prodotto?
2. Dato un certo campo possiamo calcolare il moto di una carica o di una massa
all’interno dello spazio occupato dal campo?
La risposta è positiva in entrambi i casi. In questo capitolo cominceremo a calcolare i
campi prodotti da varie distribuzioni di carica (massa) e di correnti. Nel prossimo capitolo
calcoleremo i moti delle particelle soggette a questi campi.
Per entrambi questi tipi di problemi vedremo nel seguito numerosi esempi.
Un altro esempio di campo lo si ha nel caso del moto di un fluido. Supponiamo di avere
un fluido che si muove in tubo o canale ecc… sotto l’azione di forze esterne, allora in
condizione stazionarie, possiamo avere che la velocità delle particelle di fluido in un
punto sono sempre le stesse indipendentemente da quale particella si trovi in quel punto.
Questa velocità la chiamiamo la velocità del fluido in quel punto. Ne segue che possiamo
associare una velocità del fluido ad ogni punto e avremo così un altro esempio di campo:
v = v (r ) .
4.
Campi conservativi
Una proprietà importante di un campo è quella di essere “conservativo”. I campi
gravitazionale ed elettrostatico lo sono.
Cominciamo con l’osservare che, se il campo rappresenta la forza sulla carica o sulla
massa unitaria, allora il prodotto scalare: E ⋅ ds = dL rappresenta il lavoro fatto sulla
carica unitaria. Per brevità, in quel che segue si parlerà sempre del campo elettrico, ma si
può sostituire ad E il campo gravitazionale g , se lo si desidera. Se integriamo dL da un
punto A ad un punto B seguendo una linea curva qualunque, otterremo il lavoro fatto sulla
B
∫
carica unitaria per spostarlo da A a B: L = E ⋅ ds . Evidentemente il lavoro fatto
A
corrisponderà
10
ad
una
variazione
dell’energia
cinetica
della
carica
( ∆T )
e
Cap. 3 – I campi
________________________________________________________________________
contemporaneamente ad una variazione di segno opposto – se si conserva l’energia totale
H = T + U - dell’energia potenziale. Si avrà dunque:
B
∆U
∆T
V ( B) − V ( A) =
=−
= − E ⋅ ds . Nell’integrale non è specificato quale curva si sia
q
q
∫
A
seguita nell’andare da A a B. Ci si deve però porre il problema se il valore dell’integrale
sia o no indipendente dalla curva scelta. La ragione per cui questa questione è rilevante sta
nel fatto che, in caso affermativo, la differenza V(B)-V(A) è in effetti una funzione univoca
del punto B, altrimenti no. Se la differenza V(B)-V(A) è una funzione univoca di B, allora
si hanno due conseguenze:
B
1.
∫
La V ( B ) = − E ⋅ ds + V ( A) , è funzione univoca del punto B dello spazio e si avrà
A
∂V
∂V
∂V
che: E = −
i −
j−
k . Questo significa che, data la funzione scalare
∂x
∂y
∂z
V=V(B), il “potenziale”, è possibile calcolare il vettore campo, attraverso un semplice
procedimento di derivazione. Questo può semplificare in maniera sostanziale la
soluzione di molti problemi. Risulterà infatti, spesso molto più semplice calcolare V il potenziale del campo – piuttosto che il campo stesso. Del resto il processo di
derivazione del potenziale per calcolare il campo è elementare. Per dimostrare
l’eguaglianza appena scritta, occorre derivare entrambi i membri presenti nella
definizione di V e si ottiene:
∂V
∂V
∂V
dV =
dx +
dy +
dz = − E ⋅ ds = − E x dx − E y dy − E z dz . Se in ogni punto
∂x
∂y
∂z
∂V
E x = −
∂x
∂V
dello spazio questa relazione è vera, allora abbiamo: E y = −
∂y
∂V
E z = −
∂y
ovvero:
E = −∇V
2. La funzione V=V(B) moltiplicata per la carica q, dà un’energia. In effetti, la
differenza di potenziale tra i punti A e B, moltiplicata per la carica q, rappresenta il
lavoro fatto dal campo per portare la carica da A a B, cambiato di segno, oltre che la
variazione di energia cinetica: In conclusione, l’energia totale si conserva. Da cui il
nome di “conservativo” dato al campo
Possiamo aggiungere che, se l’integrale di linea da A a B ha un valore che non dipende dal
cammino scelto, allora presi due cammini qualunque S1 e S2, deve essere:
B
B
∫
∫
A
A
( S1 ) E ⋅ ds = ( S 2 ) E ⋅ ds . La parentesi davanti all’integrale indica il cammino scelto. Da
11
Cap. 3 – I campi
________________________________________________________________________
B
B
B
A
∫
∫
∫
∫
A
A
A
B
questo si deduce che: ( S1 ) E ⋅ ds − ( S 2 ) E ⋅ ds = 0 ⇒ ( S1 ) E ⋅ ds + ( S 2 ) E ⋅ ds = 0 .
∫
Possiamo a questo punto scrivere: ( S1 + S 2 ) E ⋅ ds = 0 , dove evidentemente S1+S2
rappresenta una linea curva che parte da A, prosegue lungo S1 fino a B e ritorna ad A
attraverso S2. Dunque possiamo anche dire che un campo è conservativo se:
∫ E ⋅ ds = 0 ,
dove l’anello intorno al segno di integrale indica appunto un’integrazione su una linea
chiusa. Questo significa che il lavoro fatto dalle forze del campo su una carica puntiforme
che si muove da un punto e torna al punto di partenza è nullo.
Avendo dimostrato l’importanza della questione della conservatività del campo, vogliamo
dimostrare adesso che i campi elettrici e gravitazionali sono conservativi. Occorre partire
dal caso di una carica o massa puntiforme. Essendo la forma matematica dei due campi
uguale, ancora una volta la dimostrazione effettuata per uno dei due casi, vale anche per
l’altro.
Il campo elettrico è radiale e moltiplicato scalarmente per d s dà: E ⋅ ds = Eds cos θ = Edr
(si veda la fig. 3), dove dr è l’incremento infinitesimo del raggio r. Di conseguenza,
rB
B
∫
l’integrale diviene E ⋅ ds =
A
Q
1
∫ 4πε
rA
0
r
dr = −
2
Q 1
4πε 0 r
rB
.
rA
ds
θ
E
r
Fig. 3: Campo elettrico e vettore spostamento.
Come si vede, il valore dell’integrale dipende solo dalla distanza dei punti A e B dalla
carica puntiforme Q che genera il campo. Il potenziale (colombiano) ha la forma:
1 Q
V (r ) =
+ cost , ed è facile dimostrare che, calcolando le derivate parziali di questa
4πε 0 r
∂ 1
1 ∂r
1 x
( )=− 2
= − 2 , e relazioni
∂x r
r ∂x
r r
∂ 1
1 ∂r
1 y
e
componenti:
( )=− 2
=− 2
∂y r
r ∂y
r r
funzione, si ottiene il campo Coulombiano. Infatti:
simili
12
si
ottengono
per
le
altre
Cap. 3 – I campi
________________________________________________________________________
x y z
∂ 1
1 ∂r
1 z
( )=− 2
= − 2 . Da notare che le tre quantità: , , sono le componenti
∂
∂z r
z
r
r r r
r
r
r
del versore radiale .
r
Dunque: i campi generati da cariche (masse) puntiformi sono conservativi. Rimane adesso
da generalizzare questo risultato ad una distribuzione di cariche qualunque.
Generalizzazione che possiamo ottenere rapidamente, considerando che, se abbiamo una
serie discreta di cariche puntiformi, allora il campo elettrico è la somma dei campi elettrici
delle singole cariche puntiformi:
B
B
A
A i
∫ E ⋅ ds = ∫ ∑ E
B
i
⋅ ds =
∑∫ E
i
i
⋅ ds e quindi, poiché il
A
risultato vale per ogni termine della somma, esso varrà anche per la somma.
Se consideriamo il caso di una carica distribuita uniformemente in un volume, allora
possiamo dividere la carica totale in cariche infinitesime dq, contenute in volumetti
dq
infinitesimi dτ e definire la densità di carica ρ come: ρ =
. La carica totale sarà:
dτ
q=
∫τ ρ dτ . Naturalmente ogni pezzetto di carica infinitesima dq produce un campo
Coulombiano ed il campo totale sarà la somma, o meglio l’integrale, dei campi
infinitesimi generati da ciascuna carica dq. Il risultato che si è trovato per una carica varrà
quindi anche per il totale delle cariche:
B
∫
B
∫τ ∫
∫τ
E ⋅ ds = dτ dE ⋅ ds = df ( A, B ) = F ( A, B )
A
A
Un’ultima cosa da notare è che aggiungendo una costante al potenziale si ottiene un’altra
funzione le cui derivate danno correttamente le componenti del campo elettrico. Ne segue
che non esiste un solo potenziale, ma una classe di potenziali, cioè un insieme di funzioni
matematiche che differiscono per una costante.
Le differenze di potenziale sono invece indipendenti da costanti arbitrarie. L’unità di
differenza di potenziale è il Volt. Poiché il campo ha le dimensioni di una differenza di
potenziale diviso una lunghezza, esso viene spesso dato in unità di Volt/m.
Possiamo a questo punto aggiungere che l’affermazione fatta che il campo elettrico è la
somma (integrale) di campi infinitesimi (coulombiani) possiamo esprimerla formalmente
1
ρ ( r ')dτ
nel modo seguente: E ( r ) =
( r − r ') , in cui ρ ( r ')dτ è la carica
4πε 0 r − r ' 3
∫τ
infinitesima contenuta nel volume infinitesimo dτ , r − r ' è la distanza dalla carica
infinitesima del punto in cui si calcola il campo e dE ( r ) =
1
ρ ( r ')dτ
( r − r ') è il
4πε 0 r − r ' 3
campo coulombiano da essa generato. Egualmente per il potenziale si può vedere che il
potenziale generato da una distribuzione continua di carica è la sovrapposizione di
13
Cap. 3 – I campi
________________________________________________________________________
potenziali colombiani: V ( r ) =
1
4πε 0
∫τ
ρ ( r ')dτ
r −r'
contenuta nel volume infinitesimo dτ
in cui ρ ( r ')dτ è la carica infinitesima
e dV ( r ) =
1
ρ ( r ')dτ
4πε 0 r − r '
è il potenziale
coulombiano da essa generato. Per dimostrare ciò occorre solo far vedere che E = −∇V
( r − r ')
1
con un calcolo diretto.
ovvero che
= −∇
2
r
r'
−
r −r'
Anche per il campo di velocità di un fluido ci si può chiedere se il campo è conservativo o
∇ × v = 0 . In molti casi questo accade e allora si può scrivere il campo come
il gradiente di un potenziale: v = −∇ ϕ . ϕ è allora il potenziale della velocità
no, cioè se
5.
Linee di forza e superfici equipotenziali
Esistono dei metodi grafici di rappresentazione che danno un’immagine immediata
dell’andamento di un campo, dei punti nei quali esso assume maggiore intensità, ecc...
L’immagine di un campo acquisita attraverso il disegno delle sue linee di forza dà delle
informazioni utili.
Una linea di forza è una curva sempre tangente al vettore campo ed orientata nello stesso
verso del campo, la cui densità (numero di linee per unità di superficie) è proporzionale
all’intensità del campo. Un esempio semplice è ovviamente il caso di una carica
puntiforme. Poniamo la carica nell’origine delle coordinate (limitiamoci alla
rappresentazione su un piano bi-dimensionale, per semplicità). Il campo ha la direzione
dei raggi che si dipartono dalla carica (vedi fig. 4 sotto).
Nella stessa figura si possono raffigurare le superfici equipotenziali (nel piano
naturalmente vediamo il contorno della superficie sul piano). Si tratta di superfici definite
dalla condizione: V ( x, y, z ) = cost . Per definizione quindi, il potenziale ha gradiente zero
su queste superfici ed il campo elettrico non ha componenti parallele a queste superfici.
Carica
Superficie
equipotenziale
+
Linea di forza
Fig. 4: Linee di forza e superfici equipotenziali di un corpo.
14
Cap. 3 – I campi
________________________________________________________________________
Dunque il campo elettrico deve necessariamente essere perpendicolare alle superfici
equipotenziali. Poiché le linee di forze hanno invece la direzione del campo, esse risultano
essere sempre perpendicolari alle superfici equipotenziali. Nell’esempio della carica
puntiforme, le superfici equipotenziali sono evidentemente superfici sferiche.
Nel caso di un campo di velocità in un fluido, le linee di forza sono chiamate linee di
flusso.
6.
La corrente elettrica
Cariche puntiformi, come per esempio l’elettrone, possono muoversi sotto l’azione di un
campo elettrico. Data allora una superficie infinitesima dS, una quantità di carica dq
attraverserà questa superficie ad ogni tempuscolo infinitesimo dt. Definiamo “corrente i
dq
attraverso dS”, la quantità dq/dt. Dunque: i =
.
dt
Possiamo anche definire un
flusso di carica attraverso dS.
Immaginiamo di avere un
dS
insieme di N elettroni (o di altre
S
cariche
puntiformi) che si
dq
muovano tutti con velocità v
verso
la
superficie
dS.
Prendiamo prima il caso in cui
v sia perpendicolare a dS.
Fig. 5: Flusso di carica
attraverso una superficie.
Se consideriamo un cilindro di base dS ed altezza pari al modulo di v , tutti gli elettroni
contenuti nel cilindro attraverseranno dS nell’unità di tempo. Indichiamo con ρ la
“densità” di elettroni nel cilindro, ovvero il numero di elettroni per unità di volume nel
dN
cilindro: ρ =
. Dunque avremo che la carica che passa per dS nel tempuscolo dt sarà:
dV
dq = ρvdtdS . Se la velocità non è perpendicolare a dS, il cilindro che attraverserà tutta dS
in dt avrà altezza vcosθ, dove θ è l’angolo tra v e il versore n normale a dS. Ovvero:
dq = ρv ⋅ ndtdS . Se a questo punto vogliamo conoscere la carica totale che attraversa la
superficie S nel tempuscolo dt, occorre integrare questa espressione su tutta la superficie:
dq =
∫ j ⋅ ndtdS , dove si è sostituito: j = ρv .
S
15
Cap. 3 – I campi
________________________________________________________________________
v
dS
S
dq
Fig. 6: Corrente che attraversa una superficie.
Evidentemente possiamo anche scrivere: i =
∫ j ⋅ ndS , dove i è la corrente attraverso S. In
S
conclusione, la corrente i è il flusso del vettore j , detto densità di corrente, attraverso S.
Queste sono alcune definizioni formali. Nella maggior parte dei casi tuttavia, la corrente
implica non una carica che si muove liberamente nello spazio, ma una carica confinata
all’interno di un conduttore, cioè di un materiale (metallo per lo più) che, pur lasciandola
libera di muoversi al suo interno, la tiene confinata dentro il materiale stesso. Il caso più
frequente è, ovviamente, quello di un filo di rame (un lungo, sottile cilindro) ai cui capi si
applica una tensione, per esempio con una batteria, e al cui interno scorrono, appunto a
causa del campo elettrico applicato, degli elettroni. La corrente in questo caso è
semplicemente la quantità di carica che passa attraverso una (ogni) sezione trasversale del
filo. In effetti, si cominciò a studiare le correnti dopo che fu inventato un sistema che
consentiva di applicare un campo elettrico ad un conduttore, facendovi passare una
corrente: la pila prima (A. Volta), i generatori poi (T. A. Edison, N. Tesla…). L’unità di
corrente è chiamata “Ampere (A)” e vale un Coulomb per secondo.
Un importante fatto fisico è la conservazione della carica elettrica: la carica elettrica
semplicemente non si crea, né si distrugge. Un elettrone o un protone non si creano, né si
distruggono. Per la verità, se vogliamo essere più esatti, è vero che certi processi di fisica
delle particelle mostrano la creazione e/o la distruzione di particelle, ma anche in questi la
carica totale si conserva. Per esempio un quanto di luce (fotone), neutro, può creare una
coppia di elettroni, ma i due elettroni avranno cariche di segno opposto: uno negativo
(elettrone) ed uno positivo (positrone). Carica zero nello stato iniziale, carica zero nello
stato finale. Possiamo considerare le cariche come conservate individualmente, ed
esprimere questo fatto della conservazione della carica, con una equazione (indicata come
equazione di continuità della corrente). Prendiamo come superficie S una superficie chiusa
e calcoliamo il flusso della densità di corrente attraverso S. Dalla discussione precedente:
dq
i=
= j ⋅ ndS = ∇ ⋅ j dV , dove abbiamo applicato il teorema di Gauss. Notiamo
dt
∫
∫
S
V
adesso che, se della carica entra o esce dal volume V, allora la densità di carica ρ
16
Cap. 3 – I campi
________________________________________________________________________
all’interno di V cresce o decresce (è questa la conservazione della carica!) e pertanto:
dq
∂
dq
=−
ρdV . Sostituendo a
l’espressione precedentemente trovata, si ha:
dt
∂t
dt
∫
V
∂
∫ ∇ ⋅ jdV = − ∂t ∫ ρdV
V
V
∫
ovvero: (∇ ⋅ j +
V
∂ρ
)dV
∂t
e, poiché questa equazione vale
qualunque sia il volume V, allora l’integrando deve essere nullo. Si è ottenuta così
l’equazione differenziale che esprime la conservazione della carica e che è detta
∂ρ
“equazione di continuità della corrente”: ∇ ⋅ j +
= 0 . Interpretando invece ρ come
∂t
densità di massa questa legge esprime la conservazione della massa ed è utile nella
fluidodinamica. Si noti che le quattro quantità ( j , c ρ ) formano un quadrivettore e
pertanto si trasformano come le coordinate sotto una trasformazione di Lorentz.
L’equazione di continuità può allora scriversi:
introdotta da Einstein, semplicemente
∂j λ
∑ ∂x = 0 o, usando una convenzione
λ
λ
∂j λ
= 0 , in cui la somma è sottintesa tutte le
∂xλ
volte che un indice è ripetuto. Spesso il simbolo di derivazione è semplificato nella forma
∂
= ∂ λ , si può così scrivere l’equazione di continuità nella forma ∂ λ j λ = 0 .
∂xλ
Un’ultima importante regola cui obbediscono le correnti è la legge di Ohm, che stabilisce
il legame tra densità di corrente e campo elettrico. Supponiamo di avere un campo
elettrico sotto l’azione del quale si muovono delle cariche elettriche. La legge di Ohm
stabilisce la proporzionalità della velocità media delle cariche nella direzione del campo
elettrico: v ≈ E . Perché questo non appaia in violazione del secondo principio della
dinamica, occorre discutere i dettagli della derivazione usando concetti della
termodinamica. Per questo è preferibile rinunciare alla discussione fino al cap. 5 ed
enunciare per adesso la legge di Ohm nella forma: j = σE 2, che è essenzialmente la
stessa relazione di prima, dove al posto della velocità si è sostituita la densità di corrente
cui è proporzionale. La costante σ è detta conduttività ed il suo inverso, anch’esso
generalmente indicato con la lettera greca ρ come la densità di carica, si chiama
resistività. Moltiplicando per la sezione S e per la lunghezza del conduttore l , si ottiene:
2
Se il conduttore è in moto con velocità u , allora nel riferimento in cui il conduttore si
muove la legge di Ohm diventa: j = σ ( E + u × B ) , come si dimostra facendo la
trasformazione del vettore elettrico da un sistema all’altro. Questo ha importanza nella
fisica dei plasmi.
17
Cap. 3 – I campi
________________________________________________________________________
1
S
∆V
SEl = σ V =
⇒ ∆V = Ri che è la formula elementare della legge di
l
l
R
l
Ohm, in cui R = ρ
è la “resistenza” del conduttore.
S
jS = i = σ
7.
Il campo magnetico
Questa lunga digressione nel mondo delle correnti è stata necessaria per introdurre il
campo magnetico. Per la verità, l’esistenza di un'azione magnetica è nota da lunghissimo
tempo. La magnetite, che è un miscuglio di ossidi di ferro (FeO, Fe2O3) facilmente
reperibile in natura (per esempio a punta Calamita, Isola d’Elba) ha la proprietà naturale
di attrarre piccoli pezzetti di ferro3. Anche qui, come nel caso della forza elettrica, c’è
un’azione macroscopicamente osservabile e dunque forte. Il nome viene dal greco
µαγνησ. Tra i primi a studiare il campo magnetico in maniera scientifica ci furono il
medico della Regina Elisabetta I, W. Gilbert (1544-1603) nel suo De Magnete (1600) e G.
B. Dalla Porta (1535-1615) nel Magia naturalis (1589). Già secoli prima la bussola
veniva comunemente utilizzata. La connessione tra magnetismo e corrente fu stabilita solo
quando H.C. Oersted (1777-1851) - seguito poi da J.F.D. Arago (1786-1853) ed altri - nel
1820, si accorse che la corrente che passa attraverso un filo è in grado di far deviare l’ago
di una bussola. La possibilità di produrre campi magnetici con una corrente, permise
finalmente uno studio sistematico del fenomeno magnetismo.
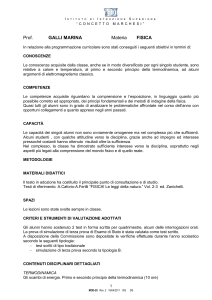
Passiamo adesso a definire il campo magnetico. Facciamo passare una corrente attraverso
un lungo filo metallico ed esploriamo la zona di spazio intorno al filo con un secondo filo
di piccola lunghezza dl cui è attaccato un dinamometro in modo da misurare la forza che
si esercita sul filo stesso e attraverso cui passa una corrente. Troviamo che la forza sul filo
di test è proporzionale alla corrente attraverso il filo lungo, all’inverso della distanza da
esso. La forza dipende anche dall’angolo formato dal filo di test con una direzione fissa.
Si trova in effetti che si può scrivere dF ≈ dl × B in cui
i
B ≈ è un vettore la cui
r
direzione si può vedere nel disegno che segue.
Possiamo pensare alla forza generata sul filo di test come la somma delle forze generate
B sugli elettroni che fluiscono nel filo di test con velocità media v la cui
direzione è ovviamente quella di dl .Risulta così che la forza agente sui singoli elettroni
di carica e deve essere F = ev × B . Questa formula definisce la cosiddetta “forza di
dal campo
[
]
Lorentz”. Le dimensioni di B sono pertanto: [B] = kg ⋅ t −1 ⋅ C −1 . L’unità di misura è il
3
I cinesi, che rivendicano l’invenzione della bussola, possono documentarne l’uso dal 1°
secolo dopo Cristo. Dunque i fenomeni magnetici sono noti almeno da allora.
18
Cap. 3 – I campi
________________________________________________________________________
Tesla (T). Si noti che per la forza di Lorentz:
B
B
A
A
∫ F ⋅ ds = ∫ F ⋅ v dt = 0
e dunque il campo
magnetico non compie mai lavoro.
Una differenza sostanziale che distingue il campo magnetico da quello gravitazionale ed
elettrostatico è l’assenza di una carica magnetica in analogia con quella elettrica (nel caso
elettrostatico) o con la massa (nel caso gravitazionale). È noto che una calamita ha due
poli e che i poli - normalmente denominati “Nord” e “Sud” - di due calamite si attraggono
se diversi e si respingono se uguali. Spezzando una calamita si ottiene però di nuovo una
calamita intera cioè dotata di due poli, non un “monopolo” o carica magnetica. In effetti
ricerche anche sofisticate non hanno mai condotto a scoprire la singola carica magnetica.
Non potendo connettere il campo magnetico a cariche magnetiche, come abbiamo fatto
per il campo elettrostatico, dobbiamo cercare una tale connessione con le vere sorgenti
del campo ovvero con le correnti. Ci dobbiamo porre cioè il problema di capire come,
data una distribuzione di correnti (che rimpiazza qui la distribuzione di cariche o di
masse), si calcoli un campo magnetico. Si tratta di trovare una legge derivata da fatti
sperimentali, seguendo per quanto possibile quello che abbiamo fatto con le cariche. Il
caso più semplice è quello di un filo rettilineo infinitamente lungo, percorso da una
corrente costante. Secondo Biot e Savart (1820), il campo magnetico obbedisce alla legge
µ i
sperimentale: B = 0 k , dove il versore k , che ci dà la direzione e il verso del campo,
2π r
è tangente al mantello del cilindro di raggio r avente il filo come asse. La costante µ 0 è
detta “permeabilità magnetica del vuoto” e vale: µ 0 = 12,566 ⋅10 −7 Tm / A .
Filo di test di lunghezza dl ,
attraversato da una corrente e
dinamometro.
r
B
i
Fig. 7: Campo magnetico generato da una
corrente elettrica che attraversa un filo
rettilineo .infinitamente lungo con filo di
test usato per definire il campo magnetico.
19
Il verso del campo magnetico è il
verso in cui gira una vite che avanzi
nella direzione della corrente. In
effetti, noi avremmo potuto usare la
legge di Biot e Savart per definire il
campo magnetico. Supponiamo di
prendere un ago magnetico come
quelli che possiamo trovare in ogni
bussola.
Possiamo sospendere l’ago in modo
da misurare la torsione che agisce su
di esso quando lo avviciniamo al
filo. Potremo così stabilire che c’è un
momento agente sull’ago la cui
intensità dipende dall’ago e dalla
direzione dell’ago rispetto alla
tangente al cilindro, come mostrato
in fig. 7.
Cap. 3 – I campi
________________________________________________________________________
Tale momento dipende inoltre dall’intensità della corrente (e dunque dal campo
magnetico e si può così pervenire alla formula: M = m × B , dove m è un vettore
(momento magnetico) che caratterizza l’ago magnetico.
Questo vettore ha la direzione dell’asse dell’ago ed è orientato dal polo Sud al polo Nord.
B invece è il vettore campo magnetico precedentemente definito.
Utilizzare questa definizione operativa del campo magnetico implica un procedimento
diverso da quello usato per enunciare la legge di Coulomb, in quanto si utilizza una coppia
di forze invece di una forza. Questo è dovuto ad una intrinseca differenza tra campo
elettrico e campo magnetico: l’assenza di cariche magnetiche singole.
Un punto importante da notare è che, se assumiamo che la forza agente su una carica e
sia data da F = ev × B (forza di Lorentz), si può calcolare la forza che viene esercitata dal
campo magnetico su un pezzetto di filo di lunghezza dl percorso da una corrente i. In un
pezzetto infinitesimo di filo ci sono dn elettroni e la forza totale sul filo è la somma delle
forze sui singoli elettroni: dF = dnev × B , dove v è la velocità comune agli elettroni
presenti nel tratto di filo di lunghezza ds. Del resto dn è il prodotto della densità ρ degli
elettroni nel filo per la lunghezza del filo ds e la sua sezione S: dF = ρeSdsv × B . Questa
formula può essere riscritta nella forma: dF = ids × B , notando che ds e v hanno la stessa
direzione e che la corrente nel filo è: i = ρev ⋅ nS = ρevS . Dunque la forza che si esercita
∫
su di un intero circuito, sarà: F = ids × B . Questo non è risultato da poco: basti pensare
C
che l’intera tecnologia dei motori elettrici è basata su questa regola.
Dalla legge di Biot e Savart si deriva un’espressione che dà il campo magnetico
immaginato come la somma (integrale) dei contributi di infiniti fili di lunghezza
µ ids × r
(si veda il par. 3.11). L’integrale
infinitesima ds attraversati da corrente: B = 0
4π
r3
C
∫
si estende su di una linea chiusa perché un circuito percorso da corrente è
necessariamente una linea chiusa: il filo può essere considerato infinito solo se si è molto
vicini.
Si può combinare questa espressione con quella della forza di Lorentz per ottenere la
forza che un circuito percorso dalla corrente i2 esercita su un altro circuito percorso dalla
µ
ds × r
corrente i1: F = 0
i1i 2 ds1 × 2 3 , dove con C1 e C2 si indicano i percorsi chiusi
4π
r
∫∫
C1 C 2
dei due circuiti, ds1 ed ds 2 sono i tratti di lunghezza dei due fili, ed r è la distanza tra i
due fili. Si guardi l’appendice a questo capitolo per la dimostrazione che la forza che un
circuito esercita su un altro obbedisce al terzo principio della dinamica.
Possiamo a questo punto usare la legge di Biot e Savart anche per stabilire se è possibile
definire un potenziale scalare. Ci interessa verificare se l’integrale lungo una linea chiusa
di B è nullo o no. Se è nullo, si potrà definire un potenziale in analogia con quanto fatto
20
Cap. 3 – I campi
________________________________________________________________________
per E ; in caso contrario, non ci sarà un potenziale per il campo magnetico. Calcoliamo
allora
∫ B ⋅ ds
scegliendo un cammino in prossimità del campo generato da un filo
infinito, per esempio quello illustrato in fig. 8. Sostituiamo al posto di B l’espressione
data dalla legge di Biot e Savart:
µ0
∫ B ⋅ ds = 2π i ∫
filo
k ⋅ ds µ 0 rdθ µ 0
=
=
i dθ .
i
r
2π
r
2π
∫
∫
Cammino di
integrazione
i
Osserviamo adesso il cammino chiuso in
fig. 8. Se la curva passa intorno al filo,
l’angolo θ fa un giro completo intorno
all’origine e dunque varia da 0 a 2π .
Risulterà pertanto:
B
∫ B ⋅ ds = µ i (Legge
0
di Ampere). Se viceversa la curva si
richiude senza girare intorno al filo, cioè
se non è concatenata, allora l’integrale
∫
varrà zero: B ⋅ ds = 0 .
Fig. 8: Integrale del campo magnetico
lungo un percorso chiuso.
Se ne può concludere che in generale non è vero che B ha circuitazione nulla ovvero non
si può definire un potenziale scalare.
8.
Proprietà dei campi
Cerchiamo ora di stabilire alcune proprietà dei campi che abbiamo definito. Una delle
proprietà del campo elettrico e gravitazionale è già nota. Abbiamo infatti visto che:
∫ E ⋅ ds = 0 . Spesso questo risultato viene descritto dicendo che “la circuitazione del
campo elettrostatico è nulla”. Possiamo ora riproporre lo stesso risultato in una forma
diversa, usando il teorema di Stokes, che asserisce che per un campo vettoriale A , vale la
seguente eguaglianza:
∫ A ⋅ ds = ∫ (∇ × A) ⋅ ndS .
Sostituendo ad A , il vettore campo
S
elettrostatico e notando che, se l’integrale è nullo indipendentemente da S, allora
l’integrando è nullo, abbiamo che: ∇ × E = 0 . Questa proprietà del campo elettrostatico è
evidentemente equivalente al fatto che la circuitazione è nulla e si esprime spesso
chiamando il campo elettrico “irrotazionale”. Da notare che mentre la prima era una
relazione integrale, quest’ultima è una relazione differenziale o locale. Passiamo adesso
ad un’altra proprietà del campo elettrostatico, espressa dal cosiddetto teorema di Gauss.
Esso afferma che il flusso del campo elettrico attraverso una qualunque superficie chiusa è
pari alla carica contenuta all’interno della superficie divisa per la costante dielettrica del
21
Cap. 3 – I campi
________________________________________________________________________
∫
vuoto ε 0 , cioè: Φ( E ) = E ⋅ ndS =
S
q
ε0
. Possiamo anche trasformare questa relazione
integrale in una locale. Infatti, secondo il teorema di Gauss, il flusso di un campo
vettoriale attraverso una superficie chiusa è uguale all’integrale della sua divergenza nel
volume racchiuso dalla superficie stessa.
q
ρ
ρ
E ⋅ ndS = ∇ ⋅ EdV =
=
dV , ovvero:
(∇ ⋅ E − )dV = 0 .
Pertanto:
∫
∫
S
V
∫ε
ε0
V
∫
0
V
ε0
Essendo l’integrale nullo, l’integrando sarà anch’esso pari a zero: ∇ ⋅ E −
ρ
= 0.
ε0
Dimostriamo adesso la forma integrale del teorema di Gauss. Cominciamo dal caso di una
sola carica puntiforme, proprio come abbiamo fatto per la circuitazione. Se il teorema di
Gauss è vero per una carica puntiforme, lo sarà anche per un sistema di cariche
puntiformi, perché il campo totale è la somma dei campi generati dalle singole cariche
puntiformi. Dunque il flusso totale sarà la somma dei flussi delle singole cariche (pari a
qi
), cioè sarà uguale alla somma delle cariche divisa per la costante dielettrica del vuoto.
ε0
Se la somma è in effetti un integrale, nulla cambia nel discorso fatto e dunque occorre
solo dimostrare il teorema per una carica puntiforme, per la quale il campo è noto,
essendo questo quello della legge di Coulomb.
q
q
1
k ⋅ ndS =
k ⋅ ndΩ , dove k è il
Il flusso sarà pari a: Φ( E ) = E ⋅ ndS =
4πε 0 r 2
4πε 0
∫
∫
S
S
∫
Ω
versore radiale, cioè lungo la congiungente la carica con l’areola dS e dΩ è l’angolo solido
sotteso da dS. Adesso, se k e n hanno la stessa direzione, il loro prodotto scalare sarà
uguale ad uno. Integrando su tutta la superficie (che risulta sferica) si ottiene 4π e quindi il
risultato cercato.
Nel caso più generale il prodotto scalare risulta in un cosθ diverso da 1 ed allora si ha:
q
dS
q
cosθdS
Φ( E ) =
k ⋅n 2 =
.
4πε 0
4πε 0
r
r2
∫
∫
S
S
dS
θ
q
k
n
Fig. 9: Dimostrazione del teorema di Gauss per una carica puntiforme.
In questo caso però, si può facilmente vedere che cos θdS è pari ad una superficie
infinitesima dS ' perpendicolare a k . Sostituendo si ha:
22
Cap. 3 – I campi
________________________________________________________________________
Φ( E ) =
q
4πε 0
∫
S
cos θdS
r
2
=
q
4πε 0
dS '
∫r
S'
2
=
q
4πε 0
q
∫ dΩ = 4πε
Ω
4π =
0
q
ε0
. Una conseguenza
del teorema di Gauss o, anzi, una maniera diversa, ma utile di riscriverlo, è fare uso della
relazione che lega campo elettrico e potenziale e sostituirla nell’espressione del teorema:
∇⋅E =
ρ
ρ
ρ
⇒ −∇ ⋅ ∇V = −∆V =
. L’equazione: ∆V = −
è nota come equazione di
ε0
ε0
ε0
Poisson ed è estremamente utile per risolvere problemi di elettrostatica nei quali, data una
distribuzione di carica, si debba calcolare il potenziale o il campo. Vedremo qualche
esempio nel seguito.
1 dρ
. Se il campo può
ρ dt
1 dρ
. Nel caso di un
essere derivato come gradiente di un potenziale, si avrà: ∆ ϕ =
ρ dt
Nel caso del campo di velocità di un fluido si trova: ∇ ⋅ v = −
liquido la densità è costante perché il liquido è incomprimibile e si trova:
∆ϕ = 0 .
∇⋅v = 0
o
Per il campo magnetico B , il teorema di Gauss rimane valido ma, come si è detto, non ci
sono cariche magnetiche isolate: il più semplice sistema di cariche è un sistema di due
cariche o poli di segno opposto (dipolo). Pertanto, per il campo magnetico deve valere:
∫ B ⋅ ndS = 0 su qualunque superficie chiusa. Di conseguenza, la relazione locale che si
S
trova è: ∇ ⋅ B = 0 . A questo punto rimane solo da stabilire quale sia il rotore di B . In
∫
∫
precedenza abbiamo visto che µ 0i = B ⋅ ds = (∇ × B ) ⋅ ndS = µ 0
∫ j ⋅ ndS ,
dove il
S
primo passaggio è giustificato dal teorema di Stokes ed il secondo dall’osservazione che
la corrente concatenata con il cammino d'integrazione è uguale al flusso del vettore
densità di corrente. Con considerazioni analoghe a quelle già fatte è possibile concludere
che la legge di Ampere può essere riscritta nella forma: ∇ × B = µ 0 j .
Nel caso del campo magnetico, possiamo porci per B un problema nuovo che non aveva
senso nel caso del campo E . Dato che il campo magnetico ha divergenza nulla (e non
rotore nullo) e dato che il rotore di un vettore ha sempre divergenza nulla, allora possiamo
cercare una funzione vettoriale A , che definiremo “potenziale”, il cui rotore sia uguale a
B : B = ∇× A.
Una tale funzione può essere trovata in effetti, però il potenziale vettore non è definito
univocamente da questa relazione, perché, dato un potenziale A tale che B = ∇ × A , la
funzione vettoriale A = A + ∇f soddisferà la stessa equazione, per la ragione che il
rotore di un gradiente è anch'esso identicamente nullo.
23
Cap. 3 – I campi
________________________________________________________________________
In conclusione, esiste un insieme infinito di potenziali vettori che differiscono tra loro per
il gradiente di una funzione scalare.
9.
Conclusioni sui campi
Abbiamo a questo punto trovato quattro relazioni valide per il campo elettrostatico E e
magnetostatico B . Le due relazioni valide per E sono valide anche per il campo
1
gravitazionale g a patto di sostituire alla costante
la costante gravitazionale G . Le
4πε 0
quattro relazioni sono:
∇ × E = 0
∇ ⋅ E = ρ
ε0
Equazioni di Maxwell
∇ ⋅ B = 0
∇ × B = µ j
0
Queste quattro relazioni sono note come “equazioni di Maxwell” in forma locale o
differenziale. Più in avanti dovremo modificarle per ottenerne la forma finale, valida
anche nel caso di campi dipendenti dal tempo. Per avere un quadro completo
dell’elettromagnetismo, occorre aggiungere tre equazioni: l’equazione di continuità della
corrente, la forza di Lorentz e l’equazione di Ohm:
∂ρ
continuità della corrente
∇ ⋅ j + ∂t = 0
F = e( E + v × B ) forza di Lorentz
equazione di Ohm
j = σE
È importante riconoscere il contenuto fisico presente in queste equazioni.
1.
La prima e la seconda equazione di Maxwell sono in effetti una diretta conseguenza
della legge di Coulomb. Se la legge di Coulomb non avesse esattamente la forma che
ha, in particolare se l’esponente di r non fosse pari a 2, nessuna delle due proprietà
sarebbe vera. Esperimenti anche recenti hanno cercato di trovare eventuali deviazioni
dal valore 2, senza riuscirci. Il fatto che l’esponente sia esattamente 2 dovrebbe
derivare da qualche principio più profondo, ma fino ad oggi non si è trovata nessuna
spiegazione. Il punto è che l’esponente 2 è esattamente quello che appare nella
definizione geometrica dell’angolo solido e questa è una coincidenza straordinaria.
Una forma utile con cui esprimere il teorema di Gauss è data dall’equazione di
Poisson: ∆V = −
2.
24
ρ
ε0
Il fatto che la divergenza di B sia zero dipende dall’assenza di monopoli magnetici.
L’ultima equazione di Maxwell esprime il fatto che il campo magnetico è generato da
Cap. 3 – I campi
________________________________________________________________________
3.
4.
5.
6.
correnti. Vedremo che, nel caso di campi dipendenti dal tempo, occorre aggiungere al
secondo membro della quarta equazione un’altro tipo di corrente.
L’equazione di continuità della corrente esprime la conservazione della carica
elettrica. Ci siamo già dilungati su questo punto ed abbiamo messo in evidenza dove
la conservazione sia cruciale nello stabilire questa relazione.
La forza di Lorentz è anch’essa un fatto fisico sperimentale per il quale non si è
trovata spiegazione. Qui abbiamo usato la forma completa della forma di Lorentz,
comprendente cioè anche la forza elettrica.
La legge di Ohm può essere dimostrata a partire da considerazioni sul gas di elettroni
liberi in un conduttore. È una legge estremamente utile, ma non contiene della fisica
nuova.
Infine il teorema di Helmholtz: ogni campo F , di cui siano noti divergenza
∇⋅F = ρ'
e
rotore
∇×F = j ' ,
è
dato
da:
F ( r ') = −
1
∇⋅
4π
ρ '( r )
1
j '( r )
∫τ r − r ' dτ + ∇ × 4π ∫τ r − r ' dτ
e dunque è determinato da
ρ ', j ' . In questa forma il teorema è valido per superfici equipotenziali all’infinito
dove il campo va a zero.
1
ρ (r )
Di fatto il campo elettrico ha rotore zero e dunque: E ( r ') = −
dτ e
∇⋅
4πε 0
r −r'
∫τ
V ( r ') =
1
4πε 0
ρ (r )
∫τ r − r ' dτ
( ρ' = −
nulla e dunque: B( r ') = ∇ ×
µ0
4π
ρ
) , mentre il campo magnetico ha divergenza
ε0
j (r )
∫ r − r ' dV
e A( r ') =
V
µ0
4π
∫τ
j ( r )dτ
( j ' = µ0 j (r ) )
r −r'
(potenziale vettore).
1
Si noti che ∆ (
) = 0 almeno che non sia r − r ' = 0 , nel qual caso esso diverge4.
r −r'
Applicando dunque il laplaciano alle espressioni del potenziale scalare e del potenziale
ρ ( r ')
vettore, troviamo: ∆V ( r ') = −
(equazione di Poisson) e ∆A(r ') = − µ0 j (r ') .
ε0
4
Una funzione nulla ovunque tranne che in un punto dove diverge è chiamata una delta di
1
Dirac e indicata col simbolo δ ( x ) . Evidentemente δ ( x ) = ∆ (
); x = r − r ' . Per
r −r'
+∞
essa vale l’uguaglianza che abbiamo appena usata:
∫
−∞
25
f ( x )δ ( x )dx = f (0)
Cap. 3 – I campi
________________________________________________________________________
La dimostrazione del teorema di Helmholz procede come segue.
−1
1
−1
S (r )
S ( R ) = S (r )δ ( r − R ) dV =
S (r )∆ p
dV =
∆g
dV =
r −R
4π
4π
r −R
V
V
V
1
S (r )
1
S (r )
=
∇g × ∇g ×
dV −
∇g∇g ⋅
dV , Dove abbiamo usato il fatto che:
4π
4π
r −R
r −R
∫
∫
∫
∫
∫
V
V
1
∆p
= ∆g
r −R
1
e la relazione: ∇ × ∇ × a = −∆a + ∇∇ ⋅ a .
⋅
r −R
1
1
ma, tenendo conto del fatto che: ∇ p ⋅
,
= −∇ g ⋅
r −R
r −R
∇ p ⋅ S (r )
S (r )
S (r )
1
dV +
dV =
∇g ⋅
dV = − S ( r )∇ p ⋅
dV = − ∇ p
r −R
r −R
r −R
r −R
V
V
V
V
∫
=−
∫
S (r ) ⋅ n
r −R
S
posto
∫
∫
∫∇
dS +
V
r −R
V
S (r )
p
∇ p ⋅ S (r )
∫
r −R
dV =
∫
dV =
∇ p ⋅ S (r )
r −R
V
S (r ) ⋅ n
S
∫
r −R
∫
dV , dove nell’ultimo passaggio abbiamo
dS = 0 , ammettendo di portare la superficie all’infinito
dove la S (r ) = 0 .
Pertanto;
S ( R) = ∇ g × ∇ g ×
1
4π
S (r )
1
∫ r − R dV − 4π ∇ ∫
g
V
V
∇ p ⋅ S (r )
r −R
dV . Possiamo trattare il primo
termine in maniera analoga:
∇g ×
S (r )
∫ r −R
∫
dV = ∇ g ×
V
Tuttavia .
V
∫∇
p
×
V
S (r )
r −R
S (r )
r −R
dV =
∫
dV = − ∇ p ×
V
S (r )
r −R
+
∫
V
∇ p × S (r )
r −R
dV =
∫
V
∇ p × S (r )
r −R
dV
S (r )
∫ r − R × ndS = 0 , sempre ammettendo di portare la
S
superficie d’integrazione all’infinito dove S (r ) = 0 . Così, in fine, abbiamo:
S ( R) = ∇ g ×
A=
26
1
4π
∫
V
1
4π
∫
∇ p × S (r )
V
∇ p × S (r )
r −R
r −R
dV − ∇ g
dV e ϕ =
1
4π
∫
V
∇ p ⋅ S (r )
r −R
dV . Posto allora:
∇ p ⋅ S (r )
1
∇g
dV , si ottiene S ( R ) = ∇ g × A − ∇ g ϕ .
4π
r −R
V
∫
Cap. 3 – I campi
________________________________________________________________________
Nel caso le superfici di contorno non siano all’infinito occorre modificare la definizione
dei potenziali in modo da includere gli integrali su detta superficie, come vedremo nel
discutere il teorema di Green.
9. L’introduzione del campo em nella lagrangiana e il principio di minimalià
Abbiamo visto come introdurre nelle equazioni del moto un potenziale dipendente solo
dalla posizione: che si può fare se le forze dipendono anche dalla velocità? La questione
non è solo accademica perché la forza di Lorentz dipende appunto dalla velocità.
Scriviamo la forza agente su una particella nel caso delle forze e.m., usando i potenziali
scalare ( ϕ = ϕ ( x, y, z ) ) e vettore ( A = A( x, y, z, t ) ):
F = e( E + v × B) = e(−∇ϕ −
∂A
∂A
+ v × ∇ × A) = e(−∇ϕ −
+ ∇(v ⋅ A) − (v ⋅ ∇) A) =
∂t
∂t
5
.
dA
= e(−∇(ϕ − v ⋅ A) − )
dt
C’è dunque una parte della forza la quale può comunque essere derivata come gradiente di
un potenziale, ma appare in più una derivata totale del potenziale vettore. Proviamo allora
a scrivere la Lagrangiana come: L = T − e(ϕ − v ⋅ A) e scriviamo le equazioni di Lagrange
per
una
particella
carica
sotto
l’azione
di
un
campo
e.m.:
∂ (ϕ − v ⋅ A) d
∂ (ϕ − v ⋅ A)
d ∂T
d ∂ (ϕ − v ⋅ A)
−e
+e
= ( p x + eAx ) + e
=0⇒
dt ∂v x
dt
∂v x
∂x
dt
∂x
dA
∂ (ϕ − v ⋅ A)
∂ (ϕ − v ⋅ A)
d
d
⇒
( p x + eAx ) = −e
p x = −e x − e
dt
∂x
dt
dt
∂x
e simili per le altre componenti. Come si vede, riotteniamo le equazioni della dinamica.
Possiamo allora sommare tale Lagrangiana sul sistema e passare alle coordinate
generalizzate, ottenendo la Lagrangiana generale per un sistema di particelle soggette ad
un campo e.m.: L =
(Ti − e(ϕ (ri ) − v i ⋅ A(ri , t ))) , che può poi essere resa funzione delle
⇒
∑
i
coordinate generalizzate, usando le trasformazioni tra coordinate cartesiane e coordinate
generalizzate. Infine notiamo, che il momento coniugato ad una coordinata non è più:
mv x (e simili), ma mv x − eA x (Principio di minimalità).
A mo’ di esempio, calcoliamo l’energia di una particella in un campo magnetico costante.
1
1 2
e
e2 2
( p − eA)2 + eV =
p −2
p⋅ A+
A + eV . Se abbiamo un campo
2m
2m
2m
2m
magnetico costante, per esempio lungo l’asse Z, il secondo termine diventa:
E=
Si può facilmente dimostrare che: v × ∇ × A = ∇(v ⋅ A) − (v ⋅ ∇) ⋅ A , con un calcolo
diretto.
5
27
Cap. 3 – I campi
________________________________________________________________________
e
e
e
e
e
p⋅ A = −
Bz ( − px y + p y x ) = −
Bz ( r × p) z = −
Bz Lz = −
L ⋅ B = −m ⋅ B
2m
2m
2m
2m
2m
con m , momento magnetico della particella giacché, per un campo magnetico costante
B
risulta A = z ( − yi + xj ) , come si vede calcolandone il rotore. Per quanto riguarda il
2
e 2 2 e 2 B z2 2
terzo termine:
A =
r esso viene spesso considerato trascurabile a causa del
2m
2m 4
termine di carica al quadrato (carica piccola) . Si noti che la presenza del temine − m ⋅ B
−2
non implica nuove forze su una particella F = ∇( − m ⋅ B ) = 0 , tuttavia, nel caso di un
corpo tridimensionale, esso implica l’esistenza di una coppia agente sul corpo stesso:
∂(−m ⋅ B)
M =
= mB sin θ .
∂θ
10. Calcolo del campo elettrico
Nel seguito vedremo alcuni esempi di calcolo del campo elettrico a partire da una
distribuzione di carica. Si tratta di esempi standard che hanno il pregio di consentire delle
soluzioni esatte. Per molti di questi problemi si può procedere o calcolando direttamente il
campo elettrico o calcolando prima il potenziale e poi, per differenziazione, il campo. Il
secondo metodo è normalmente più semplice perché non richiede l’uso di vettori con
l’attenzione che essi richiedono a componenti, proiezioni, ecc… Il teorema di Gauss può
essere utilissimo a risolvere alcuni dei problemi. Daremo anche un esempio di uso
dell’equazione di Poisson.
a.
Distribuzione uniforme di carica su di una superficie sferica
Questo è un problema particolarmente interessante perché ci permette di rispondere
adesso alla questione lasciata in sospeso quando abbiamo esaminato l’esperimento di
Coulomb. Una distribuzione di carica sferica produce un campo uguale a quello derivante
da una carica puntiforme? Consideriamo dapprima il caso in cui la carica sia distribuita
uniformemente su di una sfera ed applichiamo il teorema di Gauss. Possiamo prendere
come superficie alla quale applicare il teorema di Gauss una superficie sferica esterna, ma
concentrica a quella sulla quale sono distribuite le cariche (si veda fig. 10). Il flusso del
campo elettrico è pari all’intera carica presente sulla superficie divisa per la costante
dielettrica del vuoto. Possiamo aspettarci che il campo sia radiale cioè che dipenda solo
dalla distanza dal centro della sfera e dunque sia costante su di una superficie sferica e che
abbia la direzione del raggio. Questo per evidenti ragioni di simmetria: se la carica che
genera il campo non dipende da θ e φ, perché il campo dovrebbe? Cosa potrebbe creare
una componente non radiale del campo? Ciò detto, possiamo scrivere:
28
Cap. 3 – I campi
________________________________________________________________________
q
∫ E ⋅ ndS = ε
S
= E 4πr 2 ⇒ E =
0
1
q
4πε 0 r 2
, come volevasi dimostrare. Evidentemente il
potenziale sarà quello di una carica puntiforme: V ( r ) =
1 Q
+ cost . A questo
4πε 0 r
punto possiamo stabilire che il potenziale all’infinito vada a zero. Questo criterio, per altro
alquanto arbitrario, ma ragionevole, ci consente di porre la costante arbitraria a zero e
dunque di scrivere: V ( r ) =
1
Q
.
4πε 0 r
Questo problema può essere risolto anche facendo uso del principio di sovrapposizione.
Il potenziale infinitesimo generato da una superficie sferica a distanza d dal centro della
dV (r ) =
sfera sarà:
Carnot)
σ 2π R sin θ Rdθ
1
4πε 0
(facendo uso del teorema di
(d 2 + R 2 − 2dR cos θ )
r = ( d 2 + R 2 − 2dR cos θ ) . Dunque
π
π
1
σ 4π R 2 sin θ dθ
1 Q
d ( − cos θ )
V (r ) =
=
=
∫
∫
2
2
2
4πε 0 2 0 ( d + R − 2dR cos θ ) 4πε 0 2 0 ( d + R 2 − 2dR cos θ )
1
1
π
Q
d
=
∫
4πε 0 2dR 0 dθ
(
)
( d 2 + R 2 − 2dR cos θ ) =
r’
R
O
1 Q
4πε 0 d
r
θ
x
q’
q
d
Supponiamo adesso che la carica sia distribuita uniformemente nel volume della sfera e
calcoliamo il campo all’esterno della sfera.
rE
Superficie
di Gauss
29
R
Sfera carica
Cap. 3 – I campi
________________________________________________________________________
Applichiamo di nuovo il
teorema di Gauss usando
una superficie sferica
concentrica alla sfera
carica, come prima. Per
le ragioni di simmetria
già citate, possiamo
riscrivere le equazioni
precedenti.
Fig. 10: Sfera carica.
Otterremo lo stesso risultato, tuttavia, stavolta possiamo calcolare anche il campo
all’interno della sfera. Basta prendere la superficie di Gauss all’interno della sfera, e
ripetere il ragionamento. Otterremo:
∫
E ⋅ n dS = E 4πr =
2
S
q
ε0
=
1
ε0
r
∫
0
4πρr 2 dr =
4 ρπr 3
ρr
⇒E=
. Come si vede il campo
3ε 0
3ε 0
all’interno della sfera cresce con il raggio fino ad un valore massimo che viene raggiunto
sulla superficie esterna. Dopo di che il campo diminuisce con un andamento Coulombiano.
Si può anche usare di nuovo il principio di sovrapposizione, sostituendo alla densità di
carica superficiale quella di volume e dando alla superficie sferica uno spessore dR e
infine integrando tra
R = 0 e R = R0 con R0 il raggio della sfera. Teniamo presente
che le considerazioni fatte valgono anche nel caso di una distribuzione di massa, non solo
di carica. Per esempio, il campo gravitazionale generato dalla Terra è uguale a quello che
sarebbe prodotto da una massa pari a quella della Terra, ma concentrata nel centro. Questo
naturalmente è vero, se e solo se la massa è distribuita uniformemente all’interno della
sfera. Chiaramente, nel caso della Terra non abbiamo esattamente una sfera, la densità
delle rocce varia notevolmente ed inoltre esistono rilievi che modificano ulteriormente la
simmetria. Ci si devono dunque aspettare delle distorsioni locali del campo gravitazionale
che saranno certamente “sentite” (cioè provocheranno perturbazioni delle orbite reali
rispetto a quelle teoriche) dai satelliti artificiali, con i quali si può dunque mappare il
campo gravitazionale terrestre. Possiamo estendere la nostra discussione al caso di una
carica distribuita su di un conduttore, cioè su di un corpo in cui le cariche elettriche si
muovono liberamente, come nei metalli. In un conduttore le cariche libere si disporranno
sempre in modo che il campo elettrico interno sia nullo. Se applichiamo il teorema di
Gauss utilizzando una qualunque superficie interna al corpo conduttore elettrizzato,
troveremo necessariamente che il campo elettrico è nullo perché questa è la configurazione
d’equilibrio. Se il campo è nullo, il flusso è nullo sulla superficie di Gauss e dunque la
carica interna deve essere zero. Di conseguenza, la carica in eccesso si dovrà disporre per
forza sulla superficie esterna del conduttore, così che non sarà mai possibile scegliere una
superficie di Gauss interna al metallo contenente la carica in eccesso. Inoltre il campo
elettrico sulla superficie deve sempre essere perpendicolare alla superficie: una
componente del campo elettrico parallela alla superficie del conduttore farebbe muovere
30
Cap. 3 – I campi
________________________________________________________________________
delle cariche producendo delle correnti superficiali. Dunque, una sfera conduttrice, carica
con carica Q e di raggio R, deve essere equipotenziale e, poiché abbiamo visto che il
1 Q
potenziale alla superficie della sfera è dato da V ( R ) = −
, la sfera sarà tutta a
4πε 0 R
questo potenziale. Possiamo a questo punto interpretare la formula che ci dà V(r) dicendo
che il potenziale di una sfera carica è proporzionale alla carica e che il rapporto tra
Q
potenziale della sfera e carica sulla sfera è: C = = 4πε 0 R .
V
Questo rapporto si chiama “capacità” e si misura in Farad = 1Coulomb / Volt .
Possiamo tentare di generalizzare il concetto di capacità ad un sistema di due corpi.
Consideriamo due sfere conduttrici concentriche. Supponiamo di mettere una carica +Q su
quella interna. Sulla superficie interna della sfera esterna apparirà una carica –Q. Questo è
l’unico modo per annullare il campo all’interno del secondo conduttore. Solo così infatti si
potrà avere flusso nullo e dunque campo nullo su di una superficie di Gauss interna alla
corona sferica esterna. Calcoliamo dunque la differenza di potenziale tra le due sfere. Si
r2
tratta di calcolare l’integrale: ∆V =
∫
r1
Q
E ⋅ ds =
4πε0
r2
1
∫r
r1
2
dr =
Q 1 1
Q d
( − )≅
,
4πε0 r1 r2
4πε0 r 2
dove d = r2 − r1 e r = r1r2 . Stiamo assumendo che lo spazio vuoto tra le due sfere sia
piccolo e i due raggi siano all’incirca uguali. La capacità C di questo sistema è:
2
Q
r2
S
= 4πε0
= ε0
dove S è la superficie della sfera e d la separazione tra le due
∆V
d
d
sfere. Il sistema di due sfere si chiama condensatore sferico. Vedremo altri esempi di
condensatori.
C=
-Q
+
Q
r1
+Q
Intercapedine
Superficie di Gauss
r2
Fig. 11: Condensatore sferico.
31
Cap. 3 – I campi
________________________________________________________________________
Dalle considerazioni precedentemente espresse sui conduttori, si può comprendere anche
come funzioni la cosiddetta “gabbia di Faraday”, che consiste in una gabbia metallica
cava. Questa gabbia scherma il suo interno da qualunque azione elettrica esterna. Infatti,
se la si sottopone ad un campo esterno, gli elettroni liberi presenti nel metallo della gabbia
si disporranno in modo tale da annullare il campo all’interno della cavità.
Per affinità, discutiamo qui anche il concetto di “potere delle punte”. Consideriamo una
sfera conduttrice di raggio R, avente una carica Q. Come abbiamo visto, la carica si
dispone sulla superficie esterna della sfera con una densità superficiale σ uniforme. Così
Q
si può scrivere: Q = 4πR 2σ e dunque: σ =
. Consideriamo adesso una sfera
4πR 2
1 Q
. Possiamo adesso calcolare Q in funzione
conduttrice isolata a potenziale V =
4πε 0 R
del potenziale cui è stata portata la sfera: Q = 4πε 0 RV . Sostituendo nell’espressione che
ci dà la σ, otteniamo la densità di carica di una sfera isolata portata a potenziale V:
V
σ = ε 0 . Si vede quindi che la densità di carica è tanto più alta quanto più piccolo è il
R
raggio. Dimostriamo adesso che il campo superficiale sulla sfera è E =
σ
(teorema di
ε0
Coulomb). Prendiamo la solita superficie sferica appena fuori della superficie carica e
quindi dello stesso raggio a meno di infinitesimi. Il teorema di Gauss impone, con le solite
considerazioni di simmetria: E 4πR 2 =
σ 4πR 2
. Mediante un conduttore connettiamo
ε0
adesso la sfera di raggio R ad un’altra sfera di raggio R'<R. In questo modo le due sfere
costituiscono un unico conduttore ed assumono lo stesso potenziale V'. Tuttavia sulla
sferetta più piccola la densità di carica sarà più grande perché R'<R, e dunque il campo
elettrico normale alla superficie della sferetta sarà più grande. Dato un corpo conduttore
più o meno arrotondato, ci possono essere delle zone in cui il raggio di curvatura della
superficie è estremamente piccolo (punte): su queste punte il campo può raggiungere
valori altissimi con pericolo di scintille e scariche. In particolare, i parafulmini funzionano
utilizzando delle punte connesse alla Terra. L’elettricità presente nell’aria viene attirata
dal campo elettrico forte della punta e quindi assorbita dal conduttore che la scarica a
Terra.
b.
Campo elettrico alla superficie di un piano
Esaminiamo i due possibili casi.
1.
32
Un piano conduttore caratterizzato da un certo spessore diverso da zero. Applicando il
teorema di Gauss, otterremo che il flusso attraverso un cilindretto avente una base
Cap. 3 – I campi
________________________________________________________________________
all’interno ed una all’esterno del conduttore (entrambe parallele al piano) è
determinato solo da quest’ultima superficie, perché sulla base interna il campo è zero e
sul mantello del cilindretto il campo è parallelo al mantello stesso. Di conseguenza:
σdS
σ
Φ( E ) = EdS =
ovvero: E =
(teorema di Coulomb). È da notare che si
ε0
2.
ε0
ottiene lo stesso risultato che nel caso di una sfera. Evidentemente, un piano è una
sfera con raggio di curvatura infinito.
Se il piano è puramente geometrico (cioè senza spessore), il flusso attraverso il
cilindro riceve un contributo da entrambe le basi. Di conseguenza:
σdS
σ
Φ( E ) = 2 EdS =
ovvero: E =
.
2ε 0
ε0
In entrambi i casi esaminati il campo elettrico è costante. Adesso immaginiamo di mettere
due piani l’uno di fronte all’altro a distanza d (come in fig. 13).
σ
Fig. 12: Campo elettrico alla superficie di un piano conduttore.
La differenza di potenziale tra i piani sarà data dal prodotto tra il campo elettrico e la
σ
distanza tra i piani: ∆V =
d . Moltiplicando e dividendo per una superficie S, avremo:
ε0
σS d Q d
Q
S
, da cui si deduce che la capacità C, definita come: C =
=
= ε0 ,
ε0 S ε0 S
∆V
d
+Q
-Q
non dipende dalla carica posta sul piano.
∆V =
Questo sistema di due piani è detto
condensatore piano. Si noti la mancanza del
fattore 2 a denominatore del campo: in realtà
esistono due campi (col fattore 2 a
denominatore) prodotti dai due piani, che si
sommano.
Ed è questo che fa scomparire il fattore 2.
La superficie S è la superficie dei piani, che
33
E=
σ
σ
− (−
)
2ε 0
2ε 0
Cap. 3 – I campi
________________________________________________________________________
nella realtà non potranno essere infiniti, ma
saranno caratterizzati da una superficie
finita.
Di nuovo, la capacità dipende solo dai
parametri geometrici del condensatore.
r
R
Fig. 13: Campo elettrico tra due armature
piane cariche.
Superficie di Gauss
per r<R
c.
Filo infinito con carica uniforme
Trattiamo adesso un altro problema che può essere risolto grazie al teorema di Gauss.
Il filo è in effetti un cilindro di raggio R, quindi possiamo calcolare il campo elettrico sia
dentro che fuori di esso, come nel caso della sfera. Cominciamo col prendere una
superficie di Gauss esterna al filo ( r > R ), come mostrato in fig. 14. Sia λ la densità
dq
lineare di carica sul filo: λ =
con l = lunghezza del filo. Per ragioni di simmetria,
dl
34
Fig. 14: Campo generato da un filo
infinito. Teorema di Gauss applicato ad
una superficie con r >R.
Cap. 3 – I campi
________________________________________________________________________
simili a quelle usate nel caso della sfera, il campo sarà radiale e dipenderà solo da r.
λ 1
Applicando il teorema di Gauss: E =
. Prendiamo adesso: r < R , ridefiniamo
2πε 0 r
Superficie di
Gauss per
r>R
r
R
Fig. 15: Campo generato da un filo infinito.
Teorema di Gauss applicato ad una
superficie con r <R.
Superficie di Gauss
per r<R
dq
come una densità di volume e riscriviamo il teorema di Gauss utilizzando le
dV
λπr 2 l
solite considerazioni di simmetria: Φ( E ) = E 2πrl =
(si veda fig. 15). Quindi:
λ=
ε0
λ
E=
r . Come si vede, il campo elettrico adesso cresce con l’aumentare di r, proprio
2ε 0
come accadeva nel caso della sfera, evidentemente perché l’aumento della carica dentro la
superficie di Gauss (che varia col volume) va più in fretta dell’aumento del flusso (che
varia con la superficie).
Un altro metodo per risolvere questo problema è quello di usare la sovrapposizione dei
campi infinitesimi o dei potenziali generati da ciascun trattino dl di filo. Abbiamo le
seguenti due formule:
35
Cap. 3 – I campi
________________________________________________________________________
•
•
V (r) = 2
1
4πε 0
Er (r ) = 2
∞
∫ (r
0
1
4πε 0
λdx
2
+ x2 )
∞
∫ (r
0
1
2
λrdx
2
+ x2 )
3
2
La prima esprime la sovrapposizione di potenziali infinitesimi Coulombiani generati da
una carica: dq = λdx a distanza r 2 + x 2 dal punto in cui si vuole conoscere il potenziale
(si veda fig. 16).
Il fattore 2 è necessario, se si integra da 0 a +∞ . Lo si omette se si integra da −∞ a +∞ .
La seconda formula dà il campo.
Occorre però notare che sopravvive la sola componente radiale E r , perché, se un trattino
di filo genera una componente dE x del campo parallela al filo, dalla parte opposta c’è un
trattino di filo che genera la stessa componente parallela, ma col verso opposto. Dunque la
componente parallela al filo è identicamente nulla.
r2 + x2
dx
x
θ
O
dEr
r
d Ex
dE
Filo
Fig. 16: Campo generato da un filo infinito carico: sovrapposizione dei campi
prodotti dai singoli tratti.
Per ottenere la componente radiale occorre naturalmente proiettare il campo lungo la
r
. Per risolvere i due integrali
direzione del raggio, cioè moltiplicare per cos θ =
2
r + x2
trovati, si possono utilizzare le due formule, reperibili sulle tavole degli integrali:
36
Cap. 3 – I campi
________________________________________________________________________
+∞
•
∫
+∞
dx
r2 + x2
0
∫
+∞
= − d (ln( − x + r 2 + x 2 )) = − ln( − x + r 2 + x 2 )
= ln( r ) +
0
0
− lim ln( −l + r 2 + l 2 )
l →∞
+∞
+∞
+∞
1
x
1
x
1
d(
)=( 2
)
= 2
3
2
2
2
2
2
2
2 2
r
r
r
r +x
r +x 0
0 (r + x )
0
E' comunque facile verificare che:
dx
x
−dx
d (ln(− x + r 2 + x 2 )) =
( −1 +
)=
•
2
2
2
2
(− x + r + x )
r +x
r2 + x2
•
∫
•
d(
dx
x
=
∫
1
)=(
x
−x
3
)dx =
(r 2 + x 2 ) − x 2
3
dx =
r 2 dx
3
r2 + x2
r2 + x2
(r 2 + x 2 ) 2
(r 2 + x 2 ) 2
(r 2 + x 2 ) 2
Il primo dei due integrali ha il secondo termine divergente. La ragione è chiara: il
problema assume che il filo sia di lunghezza l infinita e questa non è un’ipotesi fisica
accettabile. È invece più corretto assumere che il filo sia molto lungo rispetto alla distanza
r alla quale calcoliamo il campo, per cui si può sviluppare l’argomento del logaritmo in
serie:
ln( −l + r 2 + l 2 ) = ln(−l + l ( 1 +
r2
2
) = ln(−l + l (1 +
r2
2
)) = ln(
r2
)=
2l
l
2l
= 2 ln r − ln( 2l ) = ln( r ) + cost
Sostituendo questi integrali, è facile vedere che si arriva allo stesso risultato che si è
ottenuto utilizzando il teorema di Gauss.
V (r ) = 2
1
+∞
∫ (r
λdx
2
2
1
=−
λ
ln(r ) + cost .
2
+
x
)
0
Per ottenere il campo, occorre poi derivare il potenziale rispetto a r:
∂V ( r )
λ 1
Er = −
=
. Poiché il potenziale è funzione della sola variabile r, solo la
∂r
2πε 0 r
4πε 0
2πε 0
derivata rispetto a r, cioè E r , è non nulla. Sostituendo nell’espressione del campo il
risultato del calcolo dell’integrale, si riottiene il risultato precedente:
Er (r ) = 2
1
4πε 0
+∞
∫ (r
λrdx
3
=
λ 1
.
2πε 0 r
+ x2 ) 2
Una cosa da sottolineare è che sia il campo sia il potenziale trovati divergono per r → 0 .
Questa non può essere la giusta soluzione: non ci si aspetta certo che una quantità fisica
diverga. È anche vero, tuttavia, che un filo di raggio zero non esiste, dunque la soluzione
trovata non presenta il giusto andamento con r solo all’interno del filo, dove sappiamo già
che non è una soluzione accettabile: la soluzione corretta infatti va come r e dunque è
nulla a r = 0 .
37
0
2
Cap. 3 – I campi
________________________________________________________________________
È poi interessante notare che la soluzione trovata usando il principio di sovrapposizione ci
aiuta anche a trovare la soluzione per il potenziale di un segmento del filo di lunghezza 2l.
Basta in effetti integrare tra -l e l e la soluzione è valida per un segmento carico di
lunghezza 2l. In questo caso:
λ
V ( x, y, z ) =
4πε 0
l
∫ (r
−l
dx0
2
+ ( x0 − x )2 )
1
=
2
x + l + ( x + l )2 + r 2
λ
ln(
)
4πε 0
x − l + ( x − l )2 + r 2
con
r 2 = y 2 + z 2 , notando che abbiamo sostituito x delle formule precedenti con x0 − x
con
x coordinata del punto e x0 coordinata del punto carico.
E’ facile vedere che le quantità
r1 = ( x + l )2 + r 2 e
r2 = ( x − l )2 + r 2
rappresentano le distanze del punto dagli estremi del segmento carico, per cui:
x + l + r1
λ
ln(
) . Usiamo adesso un tipo di coordinate detto ellittico:
4πε 0
x − l + r2
r +r
r −r
uv
u = 1 2 , v = 1 2 , ovvero: r1 = u + v , r2 = u − v e x =
e troviamo:
2
2
l
x+l +u+v
λ
V ( x, y, z ) =
ln(
) , che possiamo riscrivere:
4πε 0
x−l +u−v
u+l 6
λ
V ( x, y, z ) =
ln(
) , da cui si deduce che le superfici a potenziale costante
4πε 0
u−l
V ( x, y, z ) =
sono quelle a u = costante, cioè le superficie per le quali la somma delle distanze dai
punti estremi del segmento è costante. Si tratta così, evidentemente, di ellissoidi con i
fuochi negli estremi del segmento carico. Ne segue che il potenziale generato da un
ellissoide conduttore carico è il potenziale del nostro segmento. La stessa cosa vale per il
caso gravitazionale il potenziale appena calcolato è così il potenziale gravitazionale
generato da una Terra ellissoidale, che è una migliore approssimazione alla reale forma
della Terra. All’infinito le due distanze saranno uguali e l’ellissoide diviene una sfera.
Per quanto riguarda il campo, si ottiene come al solito con le derivate e si ha:
Ex =
l
xu − lv
λ
2
2
2πε 0 u − l u 2 − v 2
e
Ey = −
l
yu
λ
2
2
2
2πε 0 u − l u − v 2
.
Questo risultato non si sarebbe potuto ottenere utilizzando il teorema di Gauss.
Si noti che le curve v = costante sono iperboli confocali e pertanto sono ortogonali alle
superfici equipotenziali, ne segue che esse rappresentano le linee di forza del campo.
6
Per le proprietà delle proporzioni:
x=
38
uv
x v x+v x−v
x +v u+ l u+v + x +l
⇒ = =
=
⇒
=
=
l
u l u+l u−l
x−v u−l u−v+ x−l
Cap. 3 – I campi
________________________________________________________________________
Anche in geometria cilindrica si può costruire un condensatore (due cilindri coassiali di
raggi r1 e r2) di cui si può calcolare la capacità. La differenza di potenziale sarà infatti:
Sε
r
r
r
λ
λl
Q
1
che ci dà la
∆V =
ln( 1 ) =
ln( 1 ) =
ln( 1 ) ⇒ C = 0
r1
2πε 0
2π lε 0
r2
r2
l 2πε 0
r2
r
ln( )
r2
capacità. In generale: dati due conduttori uno all’interno di una cavità dell’altro - il
condensatore - la carica posta su quello interno deve apparire con segno opposto sulla
superficie della cavità di quello esterno per il teorema di Gauss. Tale carica sarà
proporzionale alla differenza di potenziale per un fattore - la capacità del condensatore che dipende solo dai parametri geometrici del condensatore stesso.
Equipotenziali (ellissi con semiasse maggiore
(iperboli con a = v e distanza focale 1)
d.
39
Distribuzione uniforme di carica
a = u e distanza focale 1) e linee di forza
Cap. 3 – I campi
________________________________________________________________________
Prendiamo adesso il caso di una distribuzione uniforme di carica in uno spazio a tre
dimensioni, come mostrato in fig. 17.
Assumiamo che la distribuzione sia caratterizzata da una densità ρ = ρ 0 , per 0 < x < d ed
illimitatamente lungo gli assi Y e Z.
Z
Fig. 17: Distribuzione uniforme di carica.
ρ0
X
d
Y
Possiamo calcolare il potenziale risultante, utilizzando l’equazione di Poisson
ρ
d 2V
= − 0 . Infatti c’è da aspettarsi che il potenziale sia costante lungo
2
ε0
dx
ρ
Y e Z. Risolvendo questa equazione otteniamo: V ( x ) = − 0 x 2 + Ax + B , con A e B
2ε 0
costanti da determinarsi. B rappresenta il valore del potenziale all’origine, che possiamo
scegliere arbitrariamente uguale a zero in quanto il potenziale è determinato a meno di una
costante. Possiamo allora usare questa arbitrarietà per scegliere tra le infinite funzioni
potenziale quella nulla nell’origine. Dunque poniamo B = 0 . Per determinare A abbiamo
bisogno di un’altra condizione, che possiamo ottenere definendo il valore del potenziale in
un secondo punto. In verità, quello che occorre conoscere è la differenza di potenziale
unidimensionale:
40
Cap. 3 – I campi
________________________________________________________________________
applicata alla distribuzione ovvero il potenziale V0 a
V0 = −
ρ0
2ε 0
V ( x) = −
d 2 + Ad ⇒ A =
ρ0
2ε 0
d+
x = d . In questo modo:
V0
e, sostituendo:
d
ρ0
V x
x( x − d ) + 0 .
2ε 0
d
Si può notare anche che, invece di V0 si poteva dare la derivata del potenziale all’origine,
cioè il campo nell’origine.
Il campo elettrico si ottiene derivando il potenziale rispetto alla variabile x. È chiaro che
solo la componente lungo X è non nulla, come suggerito dalla simmetria del problema:
ρ
V
E x ( x) = − 0 (2 x − d ) + 0 .
2ε 0
d
A titolo informativo, questo è il modello di un diodo a stato solido in cui un pezzo di
Silicio viene trattato in modo che si formi una “carica spaziale”, la carica con densità ρ.
Applicando un potenziale esterno V0, si forma una zona carica di spessore d. Lo spessore
d dipende dalla radice quadrata di V0.
e.
Campo generato da una distribuzione uniforme ad anello sul proprio asse
Possiamo riutilizzare il sistema di sommare i potenziali ed i campi infinitesimi generati da
archetti dell’anello dl = Rdϕ di lunghezza infinitesima, la cui densità lineare di carica
q
indicheremo con λ =
. Anche in questo caso occorre proiettare il campo sull’asse
2πR
x
dell’anello usando il cos θ =
. La componente perpendicolare all’asse è nulla,
2
R + x2
perché ad ogni archetto che dà un contributo positivo a tale componente, corrisponde un
altro che dà un contributo negativo.
41
Cap. 3 – I campi
________________________________________________________________________
→
dE
R
ϕ
θ
X
Z
→
dE
Fig. 18: Campo generato da una distribuzione uniforme ad anello sul proprio asse
In formule:
λ
R
q
1
=
1
1
2
+ x 2 ) 2 2ε 0 ( R 2 + x 2 ) 2 4πε 0 ( R 2 + x 2 ) 2
xRdϕ
xR
q
x
λ
λ
•
E( x) =
=
=
4πε 0 ( R 2 + x 2 ) 3 2 2ε 0 ( R 2 + x 2 ) 3 2 4πε 0 ( R 2 + x 2 ) 3 2
L’integrazione risulta banale in questo caso perché né R, né x dipendono dalla variabile
dV ( x )
d’integrazione ϕ . È facile così vedere che E ( x ) = −
i , come deve essere per
dx
•
V ( x) =
λ
4πε 0
∫ (R
Rdϕ
1
=
∫
definizione.
È interessante notare che l’andamento di queste soluzioni quando x → +∞ è quello di un
campo Coulombiano. In effetti quando x>>R, si può trascurare R al denominatore ed il
potenziale andrà come 1/x, mentre il campo andrà come 1/x2. Questo significa che, data
una distribuzione di carica localizzata spazialmente, essa verrà vista come un’unica carica
puntiforme, se si è abbastanza lontani e dunque il campo ed il potenziale si ridurranno a
quelli prodotti da una carica puntiforme.
Questo non risulta vero nel caso di un filo infinito e di un piano (ricordiamo che la
soluzione è risultata costante!), in quanto si ha a che fare con due distribuzioni infinite.
Tali distribuzioni però non esistono in realtà: si possono considerare delle distribuzioni
come infinite, se si è ad una distanza molto piccola dal filo o dal piano, rispetto alle loro
dimensioni. In effetti, c’è una tecnica generale che si può utilizzare per studiare il campo
generato da una distribuzione di carica localizzata e capirne l’andamento a grande
distanza, che esamineremo nel prossimo paragrafo.
f.
Campo elettrostatico generato da una distribuzione di carica a grande distanza
Prendiamo un insieme di N cariche puntiformi distribuite in modo casuale in prossimità
dell’origine di un sistema di assi. La posizione di ogni carica si indichi con ri , i = 1,..., N .
42
Cap. 3 – I campi
________________________________________________________________________
P
Z
R
R − ri
Y
r
X
Fig. 19: Campo generato da una distribuzione di carica a grande distanza.
Vogliamo calcolare il campo generato da queste cariche a grande distanza dall’origine, in
un punto P la cui distanza dall'origine sia R . Evidentemente: R >> ri , ∀ i . Possiamo
scrivere il potenziale ed il campo totale utilizzando il principio di sovrapposizione:
qi
qi
R − ri
1
V ( P) =
ed E ( P ) =
. Poiché operare con il campo è
3
πε
4
4
πε
0 R − ri
0 R−r
i
i
∑
∑
i
algebricamente più complicato, ci limiteremo a discutere il caso del potenziale.
1
Nell’espressione del potenziale appaiono tanti termini del tipo:
, in cui si è però
R − ri
supposto che R >> ri . In prima approssimazione dunque:
nell’espressione del potenziale, si ha: V ( P ) =
∑ 4πε
qi
i
0
1
R − ri
≈
1
1 1
=
R 4πε 0 R
1
. Sostituendo
R
∑q
i
i
=
1 Q
,
4πε 0 R
dove Q è la carica totale del sistema. In conclusione, a grandi distanze il potenziale (e
dunque il campo) appare Coulombiano. Naturalmente se la carica totale è nulla, allora il
campo è zero. In effetti, questo è vero solo nell’approssimazione che abbiamo scelto. In
1
modo più preciso, possiamo sviluppare in serie di Taylor McLaurent i termini:
e
R − ri
sostituirli nell’espressione del potenziale. In questo caso, avremo una serie di termini che
vanno a zero sempre più rapidamente e dunque dovremo scegliere quali termini vogliamo
ritenere come sufficienti a descrivere il campo nel punto P. Svolgiamo il calcolo:
1
R − ri
43
=
1 ri ⋅ R
+ 3 + ... e sostituiamo:
R
R
Cap. 3 – I campi
________________________________________________________________________
V ( P) =
qi
∑ 4πε
i
=
1
R − ri
0
=
1
1
Q
+
4πε 0 R 4πε 0
∑
i
qi ri ⋅ R
R
3
=
1
1 1
Q
+
(
4πε 0 R 4πε 0 R 3
∑q r ) ⋅ R =
i i
i
1
Q
1 1
+
d ⋅R
4πε 0 R 4πε 0 R 3
Il termine: d =
∑q r
i i
è detto momento di dipolo del sistema di cariche e chiaramente
i
può essere diverso da zero anche se la carica totale è nulla. Il caso più semplice, dopo il
caso di una carica singola, si ha con due cariche uguali in valore, ma di segno opposto a
distanza l l’una dall’altra (dipolo). Scegliamo un sistema con l’asse X sulla congiungente
le due cariche e calcoliamo il potenziale del dipolo (si veda fig. 20).
Per quanto detto precedentemente, il momento di dipolo sarà diretto lungo l’asse X:
l
l
d=
qi ri = − q( − )i + q i = qli . Sostituendo nella formula del potenziale si ottiene:
2
2
i
∑
V ( P) =
1 d ⋅R
1 d cosθ
=
.
4πε 0 R 3
4πε 0 R 2
P
y
R
θ
-
+
X
l
Fig. 20: Campo prodotto a grande distanza da una coppia di cariche di segno opposto.
Come si vede, il potenziale diminuisce con la seconda potenza di R, mentre il potenziale
Coulombiano decresceva solo con la prima potenza. In fig. 21 sono rappresentate le
superfici equipotenziali del dipolo. Le linee di forza sono un po’ più complicate da
calcolare. Se la distribuzione di carica è continua, distribuita su un volume V , con densità
ρ il potenziale ha la stessa forma, ma il momento di dipolo è: d =
∫ ρ rdV .
V
44
Cap. 3 – I campi
________________________________________________________________________
Y
90
1,2
120
60
1,0
0,8
150
0,6
30
0,4
0,2
0,0
X
-
+
180
0
0,2
0,4
0,6
210
330
0,8
1,0
1,2
240
300
270
Fig. 21: Superfici equipotenziali di un dipolo
Calcoliamo adesso le linee di forza del campo di dipolo a partire dal campo
d 1 2
d 3 xy
Ex = −
(r − 3x 2 ) ; E y =
.
4πε 0 r 5
4πε 0 r 5
L’equazione differenziale delle linee di forza è:
Ey
Ex
=
dy
3xy
=− 2
.
dx
r − 3x 2
che può essere integrata per separazione delle variabili. Passiamo prima a coordinate
x = r cos θ
polari:
y = rsenθ
45
Cap. 3 – I campi
________________________________________________________________________
Y
90
1,2
120
60
1,0
0,8
150
0,6
30
0,4
0,2
0,0
180
0
0,2
0,4
0,6
210
330
0,8
1,0
1,2
240
300
270
dy
3xy
3r 2 senθ cos θ
3senθ cos θ
=− 2
=
−
=−
2
2
2
2
dx
r − 3x
r − 3r cos θ
1 − 3 cos 2 θ
dx = cos θdr − rsen θdθ ; dy = senθdr + r cos θdθ
dy senθdr + r cos θdθ
3senθ cos θ
=
=−
dx cos θdr − rsenθdθ
1 − 3 cos 2 θ
dr
senθ
+ r cos θ
3senθ cos θ
dr
dθ
=−
+ r cos θ =
⇒ senθ
2
dr
θ
d
θ
1
−
3
cos
cos θ
− rsenθ
dθ
3senθ cos θ
dr
=−
(cos θ
− rsenθ )
2
d
θ
1 − 3 cos θ
dr
3senθ cos θ
3senθ cos θ
⇒
(senθ +
cos θ ) = r (
senθ − cos θ ) ⇒
2
dθ
1 − 3 cos θ
1 − 3 cos 2 θ
46
X
Cap. 3 – I campi
________________________________________________________________________
⇒
dr
(senθ − 3senθ cos 2 θ + 3senθ cos 2 θ ) =
dθ
= r (3sen 2θ − 1 + 3 cos 2 θ ) cos θ ⇒
d (sen (θ ))
dr
dr
senθ = 2r cos θ ⇒
=2
⇒
dθ
r
senθ
r0
r=
sen 2θ che è la funzione graficata sopra.
sen 2θ 0
⇒
Se una retta ha equazione:
π
y = tg (θ ) x + y0 , la sua perpendicolare è:
y = tg (θ + ) x + y0 = (−1/ tg (θ )) x + y0 . Ovvero il coefficiente angolare dell’una è
2
l’inverso del coefficiente angolare dell’altra, cambiato di segno. Le linee di forza, come
dy
−3xy
= 2
. Dobbiamo dunque,
abbiamo già visto, hanno coefficiente angolare
dx r − 3x 2
dimostrare che il coefficiente angolare della tangente alle linee equipotenziali è:
dy r 2 − 3x 2
=
.
dx
3xy
Come abbiamo visto, una linea equipotenziale ha equazione: r 3 =
2
4πε 0
x
, con b =
V0 .
b
d
2
x
x
Tale equazione può essere risolta: x + y = ( ) 3 ⇒ y = ( ) 3 − x 2 . Il coefficiente
b
b
2
2
−
1
3
−
1
3
2
x3
x
2x
− 2x
− 3x
− 3x 2
2
2
3 2
3
3
dy
r 2 − 3x2
b3
angolare della tangente è allora:
.
=
= b
= b
=
2
dx
3y
3xy
3xy
x
2 ( ) 3 − x2
b
Y
90
1,2
120
60
1,0
0,8
150
0,6
30
0,4
0,2
0,0
180
0
X
0,2
47
0,4
0,6
210
330
0,8
1,0
1,2
240
300
270
Linee di forza ed equipotenziali
sovrapposte
Cap. 3 – I campi
________________________________________________________________________
Per concludere la discussione vogliamo notare che il campo generato da una coppia di
cariche di segno opposto può essere calcolato esattamente. Il potenziale è la
sovrapposizione dei potenziali coulombiani generati dalle due cariche. Abbiamo:
r
r2
r1
θ
O
-q
V (r ,θ ) =
-d
q
d
q
1 1
q
1
1
( − )=
(
)7
−
2
2
4πε 0 r1 r2
4πε 0 ( d 2 + r 2 − 2rd cos θ )
( d + r + 2rd cos θ )
in
cui abbiamo usato il teorema di Carnot per scrivere: r1 = (d 2 + r 2 − 2rd cos θ ) e
r2 = (d 2 + r 2 + 2rd cos θ ) . A grande distanza dal dipolo, dove possiamo trascurare d 2
rispetto a r 2 e sviluppando in d cos θ , si ha:
1
=
r2
1
( r + 2rd cos θ )
2
=
1
=
r1
1
( r − 2rd cos θ )
2
=
1 d cos θ
+
+ ... e
r
r2
2q d cos θ
m cos θ
1 d cos θ
=
−
+ ... , da cui: V ( r , θ ) =
3
2
4πε 0 r
4πε 0 r 3
r
r
che è naturalmente la formula già trovata per un dipolo generato da una distribuzione di
carica qualsiasi8. Derivando la formula esatta, si ottengono le componenti del campo:
7
Naturalmente la formula vale anche per una coppia di cariche dello stesso
segno a patto di cambiare il segno meno al centro della formula con un più.
88
Naturalmente, se si trattasse di due cariche dello stesso segno, i due termini di dipolo si
cancellerebbero e il campo sarebbe il campo coulombiano di due cariche.
48
Cap. 3 – I campi
________________________________________________________________________
q
r − d cos θ
r + d cos θ
∂V
( 2
) e
=
− 2
2
3/2
4πε 0 (d + r − 2rd cos θ )
∂r
(d + r 2 + 2rd cos θ )3/ 2
1 ∂V qd sin θ
1
1
Eθ ( r , θ ) = −
(
)
=
+
r ∂θ
4πε 0 (d 2 + r 2 − 2rd cos θ )3/ 2 (d 2 + r 2 + 2rd cos θ )3/2
Er ( r , θ ) = −
Ovvero,
in
coordinate
cartesiane:
E x ==
x
y
Er − Eθ
r
r
e
similmente
per
y
x
Er + Eθ )
r
r
x
x2
x
x2
y
y
r −d 2
r +d 2
− d sin θ
− d sin θ
q
r
r
r
r
r
r
Ex =
−
+
+
4πε 0 (d 2 + r 2 − 2dx )3/ 2 (d 2 + r 2 + 2dx )3/2 (d 2 + r 2 − 2dx )3/ 2 (d 2 + r 2 + 2dx )3/ 2
Ey =
(x − d)
(x + d)
) e similmente
− 2
2
2
3/
2
2
3/
2
4πε 0 ( d + r − 2dx )
( d + r + 2dx )
q
1
1
Ey =
y 2
)
+ 2
2
3/
2
2
3/
2
4πε 0 ( d + r − 2dx )
( d + r + 2dx )
=
q
Il campo di dipolo tra le cariche che generano il dipolo dipende da come sono fatte le
regioni cariche. Nella figura sottostante il campo e le equipotenziali sono generate da due
cariche puntiformi agli estremi di un segmento di lunghezza l = 2 con −1 < x < +1 . Le
cariche puntiformi saranno in pratica due sferette di raggio piccolo per evitare la
divergenza del campo e del potenziale nei punti in cui sono collocate le due cariche. Come
si vede, il campo intorno all’asse X è quasi costante lungo l’asse stesso. Se interessa
ottenere un campo ancora più uniforme, è possibile rimpiazzare le cariche puntiformi con
due superfici piane affacciate, come in un condensatore piano. Spesso un dipolo è
interessante proprio perché il campo tra i due poli può essere reso molto costante lungo un
asse e la zona che interessa è allora quella tra i poli e non quella a grande distanza
calcolata precedentemente. Comunque il campo può assumere altre forme sagomando i
due elettrodi, perché il campo alla superficie delle due armature deve essere
perpendicolare alla superficie dei conduttori formanti le armature cariche.
49
Cap. 3 – I campi
________________________________________________________________________
Linee di forza di un dipolo
semplice vicino alle sorgenti
(x=+1, x=-1)
g.
Momento di quadrupolo elettrico.
Dato una distribuzione di carica continua rappresentata da ρ = ρ ( x, y, z ) , il potenziale
ϕ = ϕ ( X , Y , Z ) da questa prodotto può rappresentarsi come:
ρ (r )
1
dV , dove V è il volume su cui è distribuita la carica. Possiamo
ϕ ( R) =
4πε 0 R − r
∫
V
espandere però il fattore
50
1
R−r
e ottenere:
Cap. 3 – I campi
________________________________________________________________________
1
R−r
+
=
1 ∂
1
+
(
R ∂x R − r
1 ∂ 2
1
(
2
2 ∂x
R−r
∂2
1
+ 2
(
∂x∂y R − r
∂
1
) x + (
∂y R − r
r =0
∂2
1
) x 2 + 2 (
∂y
R−r
r =0
∂2
1
) xy + 2
(
∂x∂z R − r
r =0
∂
1
) y + (
∂z R − r
r =0
∂2
1
) y 2 + 2 (
∂z
R−r
r =0
) z +
r =0
) z 2 +
r =0
∂2
1
) xz + 2
(
∂y∂z R − r
r =0
) yz =
r =0
1 Xx + Yy + Zz 1 3 X 2 − R 2 2 3Y 2 − R 2 2 3Z 2 − R 2 2 3 XY
+
+ (
x +
y +
z ) + 5 xy +
R
2
R3
R5
R5
R5
R
3 XZ
3YZ
+ 5 xz + 5 yz
R
R
=
Mettendo da parte il termine coulombiano e quello di dipolo, prendiamo in esame il solo
termine di quadrupolo e modifichiamolo sottraendo il termine nullo ovunque tranne che
nell’origine:
r2
1
1
3 X 2 − R 2 3Y 2 − R 2 3Z 2 − R 2
∆( ) = ( x 2 + y 2 + z 2 )(
+
+
)=0
6
R
6
R5
R5
R5
1 3 X 2 − R 2 2 3Y 2 − R 2 2 3Z 2 − R 2 2 3 XY
3 XZ
3YZ
(
x +
y +
z )+
xy +
xz +
yz =
5
5
5
5
5
2
R
R
R
R
R
R5
1 3X 2 − R2
3Y 2 − R 2
3Z 2 − R 2
3 XY
3 XZ
(
(3x 2 − r 2 ) +
(3 y 2 − r 2 ) +
(3 z 2 − r 2 )) +
xy +
xz
5
5
5
5
6
R
R
R
R
R5
3YZ
+
yz
R5
Sostituendo nell’espressione del potenziale, abbiamo:
51
Cap. 3 – I campi
________________________________________________________________________
ρ (r )
1
1 3X 2 − R2
+ (
6
R5
3Z 2 − R 2
R
1
1
1
R
dV =
⋅ r ρ (r )dV +
ρ (r )dV +
4πε 0 ∫ R − r
4πε 0 R ∫
4πε 0 R3 ∫
V
V
V
ϕ ( R) =
5
∫
V
∫V (3x
2
(3x 2 − r 2 ) ρ (r )dV +
− r 2 ) ρ (r )dV ) +
3Y 2 − R 2
3 XY
R
5
R
∫V (3 y
5
∫V xy ρ (r )dV +
2
− r 2 ) ρ (r )dV +
3 XZ
R
5
3YZ
∫V xz ρ (r )dV + R5 V∫ yz ρ (r )dV ) =
Q
1 R ⋅ d 3X 2 − R2
3Y 2 − R 2
3Z 2 − R 2
+
+
q xx +
q yy +
qzz +
4πε 0 R 4πε 0 R 2
6 R5
6 R5
6 R5
3 XY
3 XZ
3YZ
+
q +
q +
q yz
5 xy
5 xz
2R
2R
2 R5
=
1
Dove:
q xx = (3x 2 − r 2 ) ρ (r )dV
q xy = xyρ (r )dV
V
V
2
2
q yy = (3 y − r ) ρ (r )dV e q xz = xzρ (r )dV
V
V
q zz = (3z 2 − r 2 ) ρ (r )dV
q yz = yzρ (r )dV
V
V
Per un sistema a simmetria sferica i secondi tre momenti sono nulli; in effetti basta una
simmetria cilindrica intorno all’asse che chiamiamo Z.
Nel caso di simmetria sferica anche i primi tre sono nulli, ma nel caso di simmetria
cilindrica non lo sono. Nel caso di simmetria sferica infatti:
∫
∫
∫
∫
∫
∫
∫
∫
∫
V
V
V
q xx = (3x 2 − r 2 ) ρ (r )dV = 3 x 2 ρ (r )dV − r 2 ρ (r )dV =
∫
∫
∫
∫
V
V
V
V
= 3 x 2 ρ (r )dV − ( x 2 + y 2 + z 2 ) ρ (r )dV = 2 x 2 ρ (r )dV − ( y 2 + z 2 ) ρ (r )dV = 0
L’ultimo passo è giustificato dal fatto che:
∫x
2
∫
∫
V
V
ρ (r )dV = y 2 ρ (r )dV = z 2 ρ (r )dV nel
V
caso di simmetria sferica. Tuttavia nel caso di simmetria cilindrica, abbiamo che è vero
solo che:
∫x
V
52
2
∫
ρ (r )dV = y 2 ρ (r )dV , dunque risulta:
V
Cap. 3 – I campi
________________________________________________________________________
q xx = (3x 2 − r 2 ) ρ (r )dV
V
2
2
q yy = (3 y − r ) ρ (r )dV = q xx
V
q zz = (2 z 2 − x 2 − y 2 ) ρ (r )dV = −2(q xx + q yy ) = −2q xx = −2q yy
V
In conclusione il potenziale si riscrive:
1 Q
1 R ⋅ d 3 X 2 − R2
3Y 2 − R 2
3 Z 2 − R2
q
q
qzz =
φ ( R) =
+
−
−
+
zz
zz
4πε 0 R 4πε 0 R 3
12 R 5
12 R 5
6 R5
∫
∫
∫
Q
1 R⋅d
3 X 2 − R 2 3Y 2 − R 2 6 Z 2 − 2 R 2
(
)qzz =
+
+
−
−
+
4πε 0 R 4πε 0 R 3
12 R5
12 R 5
12 R 5
1
1 Q
1 R⋅d
1
1 Q
1 R⋅d
1
( X 2 + Y 2 − 2 Z 2 )qzz =
( R 2 − 3 Z 2 )qzz =
+
−
+
−
4πε 0 R 4πε 0 R 3
4πε 0 R 4πε 0 R 2
4 R5
4 R5
1 Q
1 d cos θ
3q
1 3
1 Q
1 d
3q
P0 (cos θ ) +
P (cos θ ) +
P2 (cos θ )
( − + cos2 θ ) =
=
+
+
3
2 1
4πε 0 R 4πε 0 R 3
2
2
4
R
4
πε
πε
2R
2 R3
0
0 R
=
∫
con: q = ( z 2 −
V
r2
) ρ (r )dV e supponendo che il dipolo sia orientato lungo l’asse Z
3
anche lui. Inoltre: P0 (cos θ ) = 1 , P1 (cos θ ) = cos θ
1 3
+ cos 2 θ sono
2 2
an
Pn (cos θ ) , dove i
rn
P2 (cos θ ) = −
polinomi di Legendre. Dunque il potenziale sarà: V (r , θ ) =
1
r
∑
n
coefficienti a n sono da calcolare9. Così succede che:
∑(R)
r
n
1
Pn (cos α ) =
=
1 1
, con lo stesso significato
R R−r
1 + ( r / R ) − 2( r / R ) cos α
dei simboli nel precedente sviluppo di McLauren e α = θ + Θ , con θ , Θ rispettivamente
2
gli angoli di R, r con l’asse Z. Prendiamo un punto sull’asse Z, per cui
cos θ = 1 ⇒ Pn (1) = 1 :
V (r ,0) =
⇒ an =
9
1
R
an
∑R
n
n
1
4πε 0
∫r
n
Pn (1) =
1
R
an
∑R
n
n
=
1
4πε 0
R∫
V
ρ (r )dV
R−r
=
1
4πε 0
( )
R ∑∫ R
r
n
ρ (r ) Pn (cos Θ)dV ⇒
n V
ρ (r ) Pn (cos Θ)dV
V
Come si vede, si tratta dello stesso sviluppo ottenuto nel paragrafo precedente per m = 0
53
Cap. 3 – I campi
________________________________________________________________________
In conclusione:
V ( R, θ ) =
∫ ρdV
1
V
4πε 0
R
∫ rρ (r ) P (cos Θ)dV
1
+
1
V
4πε 0
Q
1 d
1
+
cos θ +
2
4πε 0 R 4πε 0 R
4πε 0
Infatti: rP1 (cos Θ) = z e
=
1
1
cos θ +
4πε 0
R2
q 1
(−1 + 3 cos 2 θ )
R3 4
∫
∫
∫
V
V
V
∫r
2
ρ (r ) P2 (cos Θ)dV
V
R3
P2 (cos θ ) =
q = 2 r 2 ρ (r ) P2 (cos Θ)dV = r 2 ρ (r )(−1 + 3 cos 2 Θ)dV = ρ (r )(3z 2 − r 2 )dV .
Calcoliamo adesso l’energia di una distribuzione di carica in un campo elettrico esterno:
1
1
E = ρ ( r )ϕ ( r ) dV =
ρ ( r )(ϕ (0) + ∇ϕ (0) ⋅ r + (ϕ xx x 2 + ϕ yy y 2 + ϕ zz z 2 + 2ϕ xy xy + ...)dV
4πε 0
2
∫
∫
V
V
.
Il secondo termine si può scrivere:
1
∇ϕ (0) ⋅ ρ ( r ) r dV e coinvolge il momento di
4πε 0
∫
V
dipolo che potrebbe essere nullo. Il terzo termine:
1 1
ρ ( r )(ϕ xx x 2 + ϕ yy y 2 + ϕ zz z 2 + 2ϕ xy xy + ...)dV ha gli ultimi tre termini nulli se
4πε 0 2
∫
V
il sistema ha simmetria rotazionale intorno ad un asse:
Diciamo a questo punto che questo problema è interessante per la fisica nucleare
specialmente per quei nuclei che, come il deuterio, hanno un momento di quadrupolo
elettrico. L’asse di simmetria di cui abbiamo fatto uso fino ad ora è quello dello spin del
nucleo. Ora abbiamo che l’energia dovuta al quadrupolo elettrico del nucleo è:
1 1
Ed =
ρ ( r )(ϕ xx x 2 + ϕ yy y 2 + ϕ zz z 2 ) dV sottraiamo nella parentesi la quantità:
4πε 0 2
∫
V
r2
r2
r2
r2
∆ϕ = 0 =
ϕ xx + ϕ yy + ϕ zz , essendo il laplaciano nullo perché è il potenziale
3
3
3
3
generato dall’elettrone:
1 1
r2
r2
r2
Ed =
(ϕ xx ρ (r )( x 2 − )dV + ϕ yy ρ (r )( y 2 − )dV + ϕ zz ρ (r )( z 2 − )dV =
4πε 0 2
3
3
3
2
=
=
∫
∫
V
V
∫
V
1 1
1 1
(ϕ xx q xx + ϕ yy q yy + ϕ zz q zz ) =
q (−2ϕ xx − 2ϕ yy + ϕ zz + 2ϕ zz − 2ϕ zz ) =
4πε 0 6
4πε 0 6
1
8πε 0
qϕ zz
Essendo: −2ϕ xx − 2ϕ yy − 2ϕ zz = −2∆ϕ = 0 . Questo conto vale nel sistema del nucleo con
l’asse Z allineato lungo lo spin nucleare. Lo si può rifare nel sistema atomico con l’asse Z
allineato lungo l’asse del momento della quantità di moto orbitale. Si ottiene la stessa
54
Cap. 3 – I campi
________________________________________________________________________
espressione, E d =
1
8πε 0
Qϕ zz ma con la quantità q (momento di quadrupolo del nucleo)
∫
rimpiazzata dall’integrale: Q = ρ (r )( z 2 −
V
r2
)dV , dove z non è più la coordinata lungo
3
l’asse dello spin e pertanto l’integrale non è il momento di quadrupolo, pur essendo
formalmente identico a questo. Naturalmente adesso anche la derivata seconda ϕ zz sarà
lungo il nuovo asse. Tuttavia possiamo esprimere questo integrale Q in funzione di q e
dell’angolo γ tra i due assi di simmetria. In effetti il termine in r 2 è lo stesso nei due
integrali, non essendosi cambiata l’origine, ma solo l’orientamento degli assi. Chiamiamo
∫
Q zz = ρ (r ) z 2 dV
∫
e Q rr = ρ (r )
V
V
r2
dV . Dunque Q rr rimane lo stesso nei due
3
riferimenti. Indicando con le lettere greche le coordinate nel sistema del nucleo, abbiamo:
z = ξ cos α + η cos β + ζ cos γ e 1 = cos 2 α + cos 2 β + cos 2 γ sostituiamo e abbiamo:
Q zz =
∫ ρ (r ) z
2
∫ ρ (r )(ζ
dV =
V2
2
cos 2 γ + ξ 2 cos 2 α + η 2 cos 2 β )dV =
V2
∫
∫
∫
V
V
V
= cos 2 γ ρ (r )ζ 2 dV + cos 2 α ρ (r )ξ 2 dV + cos 2 β ρ (r )η 2 dV
I termini integrali provenienti dai doppi prodotti sono nulli per la simmetria nel sistema
nucleare. Anche i due termini:
∫ ρ (r )ξ
V
2
dV e
∫ ρ (r )η
2
dV sono uguali come abbiamo
V
visto prima, dunque:
∫
∫
∫
V
V
V
Q zz = ρ (r )ζ 2 cos 2 γdV + ρ (r )η 2 dV (cos 2 α + cos 2 β ) = ρ (r )ζ 2 cos 2 γdV +
∫
+ (1 − cos 2 γ ) ρ (r )η 2 dV = Qζζ cos 2 γ + (1 − cos 2 γ )Qηη = Qζζ cos 2 γ +
V
1
(1 − cos 2 γ )(Qrr − Qζζ ) =
2
1 3
1
= (− + cos 2 γ )Qζζ + (1 − cos 2 γ )Qrr = P2 (cos γ )Qζζ
2 2
2
ma, poiché:
r2
3
Q = ρ (r )( z 2 − )dV = 3Q zz − Qrr = 3P2 (cos γ )Qζζ + (1 − cos 2 γ )Qrr − Qrr =
3
2
∫
V
1 3
+ cos 2 γ )Qrr = P2 (cos γ )(3Qζζ − Qrr ) = P2 (cos γ )q
2 2
1
1
Sostituendo: E d =
Qϕ zz =
qϕ zz P2 (cos γ ) .
8πε 0
8πε 0
= P2 (cos γ )3Qζζ − (−
55
Cap. 3 – I campi
________________________________________________________________________
Il significato di tutto ciò è che il momento di quadrupolo del deuterio porta ad una
variazione dell’energia del nucleo di spin 1 immerso nel campo elettrico generato
dall’elettrone che dipende classicamente dall’angolo tra lo spin nucleare e la quantità di
moto dell’elettrone, mentre in meccanica quantistica la componente dello spin vale solo 1
o -1, comunque il momento di quadrupolo del nucleo produce uno shift dei livelli iperfini
dovuti all’accoppiamento tra spin nucleare e orbita elettronica. Se del resto esiste un
quadrupolo elettrico evidenziato da tali shift, allora bisogna chiedersi come mai ci sia un
quadrupolo del nucleo. Se le forze fossero centrali (vedi note sul potenziale delle forze di
Yukawa), esse produrrebbero solo uno stato legato p-n in onda S, dunque non ci sarebbe
momento di quadrupolo. Evidentemente devono intervenire forze non centrali del tipo:
σ ⋅ rσ ⋅ r
σ 1 ⋅σ 2 − 1 2 2 .
r
h. Un esempio di quadrupolo elettrico
Y
-q
X
+q
+q
-q
d
dall’origine. La carica
2
totale è zero il momento di dipolo è la somma di due momenti di dipolo con la stessa
direzione e verso opposto: dunque è zero. Il momento di quadrupolo può essere calcolato
dall’espressione trovata precedentemente:
q xx = (3x 2 − r 2 ) ρ (r )dV
q xy = xyρ (r )dV
V
V
2
2
q yy = (3 y − r ) ρ (r )dV e q xz = xzρ (r )dV
V
V
2
2
q zz = (3z − r ) ρ (r )dV
q yz = yzρ (r )dV
V
V
Tutti i termini contenenti la coordinata z sono nulli. Anche il termine qxy è nullo perché
Quattro cariche disposte ai vertici di un quadrato a distanza
∫
∫
∫
∫
∫
∫
per tutte le cariche o x o y è zero. Rimangono q xx e q yy che sono evidentemente
d2
. Il potenziale diviene:
2
X 2 −Y 2
d 2 3 X 2 − R 2 3Y 2 − R 2
ϕ ( R) = q
−
= qd 2
. Il campo elettrico è:
5
2 6 R5
6 R5
4 R
uguali a ± q
56
Cap. 3 – I campi
________________________________________________________________________
2X
X3
XY 2 qd 2
X 3 − XY 2
Ex = qd 2
−5
+5
=
2X − 5
5
R2
4 R7
4 R 7 4 R5
4 R
2Y
Y3
X 2Y
qd 2
Y 3 − X 2Y
E y = qd 2 −
+5
−5
=−
2Y − 5
5
4R7
4 R 7
4 R5
R2
4 R
Equazione delle linee di forza:
dy
2YR 2 − 5(Y 3 − X 2Y )
Y 3Y 2 − 7 X 2
=
=
dx 2 XR 2 − 5( X 3 − XY 2 ) X 7Y 2 − 3 X 2
Equipotenziali e curve di
campo di un quadrupolo
semplice (a grande distanza)
++
-
i.
L’equazione di Laplace
Esiste un modo del tutto generale di risolvere l’equazione di Laplace:
57
Cap. 3 – I campi
________________________________________________________________________
∆V = (
∂2
∂x 2
+
∂2
∂y 2
+
∂2
∂z 2
)V = 0 . In coordinate polari possiamo scriverla come segue:
1 ∂ 2 ∂V
1
1 ∂
∂V
1 ∂ 2V
(r
)+
(
(senθ
)+
) = 0 . La soluzione può essere
∂r
∂θ
r 2 ∂r
r 2 senθ ∂θ
sen 2 θ ∂φ2
allora cercata prendendo una funzione del tipo: V (r , θ , ϕ ) = R(r )Θ(θ )Φ(ϕ ) che, sostituita
nella equazione di Laplace e dividendo per V . dà:
1 1 ∂ 2 ∂R
1 1 1 ∂
∂Θ
1 1 ∂ 2Φ
(r
)+
(
(senθ
)+
) = 0.
R r 2 ∂r
∂r
∂θ
Φ sen 2 θ ∂φ2
r 2 Θ senθ ∂θ
questa equazione in un altro modo:
Si
può
riscrivere
1 ∂ 2 ∂R
1 1 ∂
∂Θ
1 1 ∂ 2Φ
(r
) = −(
(senθ
)+
)
R ∂r
∂r
Θ senθ ∂θ
∂θ
Φ sen 2 θ ∂φ 2
Poiché la funzione a sinistra dipende solo da r e quella a destra dipende solo dagli angoli,
l’unico modo in cui essi possono risultare sempre uguali è qualora entrambi siano uguali
ad una costante: −l (l + 1) .
1 ∂ 2 ∂R
(r
)=
∂r
R ∂r
1 1 ∂
∂Θ
1 1 ∂ 2Φ
(senθ
)+
) = l (l + 1)
Θ senθ ∂θ
∂θ
Φ sen 2 θ ∂φ2
Separiamo così l’equazione di Laplace in due equazioni. Una parte radiale:
1 1 ∂ 2 ∂R l (l + 1)
(r
)−
= 0 ed una parte angolare:
∂r
r 2 R ∂r
r2
= −(
1 1 ∂
∂Θ
1 1 ∂ 2Φ
(senθ
)=−
Θ senθ ∂θ
∂θ
Φ sen 2θ ∂φ 2
Anche quest’ultima equazione può essere divisa in due equazioni, per le stesse ragioni di
prima:
l (l + 1) +
l (l + 1)sen 2θ +
1
∂
∂Θ
1 ∂2Φ
, dove m è una costante. Si potrà
senθ
(senθ
) = m2 = −
Θ
∂θ
∂θ
Φ ∂φ 2
quindi scrivere: l (l + 1)sen 2θ +
senθ ∂
∂Θ
1 ∂2Φ
= −m2
(senθ
) = m2 ;
Θ ∂θ
∂θ
Φ ∂φ2
1 ∂2Φ
= − m 2 ha come soluzione: Φ = e± imϕ .
Φ ∂φ2
Evidentemente m deve essere intero perché si abbia una chiusura della funzione d’onda
Guardiamo prima alla parte angolare:
su se stessa: eim(φ + 2π ) = eimφ .
58
Cap. 3 – I campi
________________________________________________________________________
1
∂
∂Θ
senθ
(senθ
) = m 2 è un polinomio
Θ
∂θ
∂θ
in x = cos θ . Deve però essere: l intero e −l ≤ m ≤ l .
La cosa si può dimostrare scrivendo la soluzione dell’equazione nella forma:
La soluzione della equazione l (l + 1)sen 2θ +
Θ(θ ) = a0 + a1 cos θ + a2 cos2 θ + ... e sostituendo nell’equazione.
Si trovano le seguenti relazioni fra i coefficienti:
a2 = a0
m(m + 1) − l (l + 1)
2
e
( m + 2)( m + 1) − l (l + 1)
… Ci sono due serie di coefficienti che dipendono però
6
solo dalle due costanti: a0 e a1 . La serie che si costruisce diverge almeno che i
coefficienti non si azzerino da un certo valore in poi. Il che accade se i valori di l e m
sono nella relazioni citate. In tal caso le serie si riducono a dei polinomi: i polinomi
associati di Legendre
Se prendiamo m = 0 , abbiamo Φ = costante e possiamo modificare la prima equazione,
facendo la sostituzione: x = cos θ .
a3 = a1
∂
∂Θ
∂ 2Θ
∂Θ
(senθ
) = 0 = l (l + 1)Θsen 2θ + sen 2θ
+ senθ cos θ
=
2
∂θ
∂θ
∂θ
∂θ
∂ 2Θ
∂Θ
∂ 2Θ
∂Θ
= sen 2θ l (l + 1)Θ +
+ cot θ
= (1 − x 2 ) l (l + 1)Θ + (1 − x 2 )
− 2x
∂θ
∂x
∂θ 2
∂x 2
l (l + 1)Θsen 2θ + senθ
L’ultima di queste equazioni definisce i polinomi di Legendre che sono:
P0 ( x) = 1
P1 ( x) = x = cos θ
1
1
(3 x 2 − 1) = (3cos 2 θ − 1)
2
2
1
1
P3 ( x ) = (5 x3 − 3x ) = (5cos3 θ − 3cos θ )
2
2
....
P2 ( x) =
I polinomi di Legendre sono dunque le particolari soluzioni per m = 0 . I polinomi
m
associati
di
Legendre
sono
dati
dalla
relazione:
Plm ( x) = (1 − x2 ) 2
d m Pl ( x)
dx m
.
Moltiplicando per eimφ , si ottengono le soluzioni complete, per la parte angolare denotate
Ylm
e chiamate “armoniche sferiche”. Le prime sono:
Y11 = sin θ eiϕ ; Y1−1 = sin θ e−iϕ …
59
Y00 = 1 ;
Y10 = cos θ ;
Cap. 3 – I campi
________________________________________________________________________
Per quanto riguarda la parte radiale:
R( r ) =
A
r
l +1
1 ∂ 2 ∂R
(r
) = l (l + 1) ,
R ∂r
∂r
la soluzione è:
+ Br l , in cui A, B sono costanti d’integrazione, come si vede eseguendo le
derivate. In conclusione: V (r , θ , φ) = (
A
l +1
+ Br l )Ylm (θ , φ) . Un esempio di applicazione lo
r
troviamo nel caso di un campo costante in cui è immersa una sfera conduttrice. Questo
problema può essere risolto anche con il metodo delle cariche immagini e lo tratteremo
assieme a questo.
Notiamo a questo punto che il potenziale di dipolo elettrico a grande distanza dal dipolo
(dunque in una regione in cui vale l’equazione di Laplace ∆V = 0 ) già calcolato
d cos θ
A
V=
+ Br l )Ylm (θ , φ) , prendendo
si può scrivere nella forma V (r , θ , φ) = (
l +1
4πε0 r 2
r
l = 1 e m = 0 che dà V (r , θ , φ) = (
A
r
2
+ Br ) cos θ e scegliendo B = 0 e A =
d
.
4πε0
l. Il teorema di Green
Prendiamo adesso due funzioni arbitrarie ψ 1 e ψ 2 . Calcoliamo il laplaciano di entrambe
e moltiplichiamo per l’altra poi sottraiamo. Si ha
ψ 2 ∆ψ 1 −ψ 1∆ψ 2 . Integriamo su un
volume V, racchiuso da una superficie Σ e otteniamo:
∫ (ψ
2
∆ψ 1 − ψ 1 ∆ψ 2 )dV = ∫ (∇(ψ 2∇ψ 1 ) − ∇ψ 2 ⋅ ∇ψ 1 − ∇(ψ 1∇ψ 2 )
V
V
+∇ψ 2 ⋅ ∇ψ 1 )dV = ∫ (ψ 2∇ψ 1 − ψ 1∇ψ 2 ) ⋅ nd Σ = ∫ (ψ 2
Σ
Σ
Questa uguaglianza si chiama teorema di Green. Dove
dψ 1, 2
dψ 1
dψ 2
)d Σ
−ψ 1
dn
dn
dψ 1,2
dn
è la derivata lungo la
= ∇ψ 1, 2 ⋅ n . Prendiamo adesso come ψ 1 , la soluzione
dn
dell’equazione di Poisson (ψ ) e come ψ 2 , la funzione soluzione dell’equazione di
Laplace ( ∆ψ 2 = 0 ) ovunque tranne che nell’origine dove diverge. La ψ 2 obbedisce
normale alla superficie:
60
Cap. 3 – I campi
________________________________________________________________________
dunque alla relazione
∆ψ 2 = −4πδ ( r − R ) 10. In essa
r è la distanza del punto
P
dall’origine e R la distanza del punto sulla superficie dall’origine. La funzione ψ 2 è
chiamata la funzione di Green e viene indicata spesso con il simbolo G . E’ facile vedere
che
possiamo
identificare
la
funzione
di
Green
con
1
1
. Innanzitutto con un calcolo diretto si
G=
=
r−R
( x − X )2 + ( y − Y )2 + ( z − Z )2
trova che: ∆ (
1
r−R
) = 0 , ovunque tranne che per r = R , poi si può dimostrare che
1
∫ ∆( r − R )dV = −4π
11
. Sostituendo nel teorema di Green, otteniamo
V
∆ψ
1
∫ r − R dV − ∫ ∆Gψ dV = ∫ ( r − R
V
Σ
V
ψ (r ) =
dψ
d
1
(
))d Σ ovvero:
−ψ
dn
dn r − R
1
1 dψ
d
1
1
ρ
(
(
))d Σ +
dV . L’integrale
−ψ
∫
∫
4π Σ r − R dn
dn r − R
4πε 0 V r − R
sulla superficie esterna Σ diventa zero quando spostiamo tale superficie all’infinito.
Rimane quindi:
ψ=
1
ρ
∫ r − R dV , se la superficie Σ
4πε 0 V
viene portata all’infinito.
Se la superficie Σ non viene portata all’infinito, per esempio è un conduttore a potenziale
costante, allora abbiamo:
ψ=
ρ
1
1
1
∫ r − R dV + 4π ∫ ( r − R
4πε 0 V
Σ
dψ
d
1
(
))d Σ .
−ψ
dn
dn r − R
Come si vede, per risolvere il problema occorre conoscere il valore del potenziale e della
sua derivata rispetto alla normale alla superficie, cioè il campo perpendicolare alla
10
La funzione
δ ( r − R ) è nota come delta di Dirac ed ha la proprietà che,
∫ δ ( r − R)dV = 1 ; ∫ f ( R)δ (r − R)dV =
V
v
11
Infatti integrando su una sferetta:
1
1
d 1
( )dS =
∆ ( )dV = ∇ ⋅ ∇ ( )dV =
dn ρ
ρ
ρ
∫
V
abbiamo:
∫
V
S
1
∫ ∆( r − R )dV = −4π .
V
61
∫
∂
f (r )
1
∫ ∂ρ ( ρ ) ρ d Ω = −4π
S
2
. Per ρ = r − R
Cap. 3 – I campi
________________________________________________________________________
superficie (condizioni al contorno). Il teorema di Green, in sostanza, giustifica
matematicamente la relazione che abbiamo usato tante volte e giustificata con argomenti
fisici
ψ=
1
ρ
∫ r dV , ma ci consente anche di calcolare il campo di un sistema che
4πε 0 V
oltre ad una densità di carica sia contornato da superfici a potenziali dati. In verità la
conoscenza del potenziale e della sua derivata normale sulle diverse, sconnesse superfici
che costituiscono eventualmente Σ è ridondante. Ridefiniamo la funzione di Green, come
la funzione soluzione del problema della stessa geometria come nel problema da risolvere,
con le superfici di contorno tutte a potenziale zero e generato da una sola carica
1
puntiforme. Possiamo allora scegliere G =
+ Χ , n cui Χ è una funzione tale che
r−R
G = 0 sulle superfici equipotenziali; la Χ dovrà essere soluzione dell’equazione di
Laplace ∆X = 0 e avere come valore sulla superficie di contorno il valore X =
−1
r −R
.
Rifacendo la dimostrazione precedente, si trova allora:
ψ=
1
dψ
1
d
∫ G ρ dV + 4π ∫ (G dn − ψ dn G )d Σ =
4πε 0 V
Σ
1
1
d
G ρ dV −
Gd Σ
=
ψ
∫
∫
4πε 0 V
4π Σ dn
L’ultimo passo è giustificato dal fatto che la funzione di Green è nulla per scelta delle
condizioni al contorno sulla superficie Σ . In questo modo si vede che occorre conoscere
solo il valore del potenziale sulle superfici di contorno. Se le superfici di contorno sono
conduttrici
−
il
loro
potenziale
ψ
1
d
Gd Σ = − 0
ψ
∫
4π Σ dn
4π
è
∫ ∆GdV = ψ
V
costante
0
,
(ψ
dunque
=ψ0 )
ψ=
e
1
4πε 0 V∫
si
ha
che
G ρ dV + ψ 0 .
Noto il potenziale in tutto lo spazio, la sua derivata normale alle superfici ci dà il campo
elettrico e, usando il teorema di Coulomb; possiamo ottenere le densità superficiali di
carica sui conduttori. Un’integrazione ci dà poi la carica totale sui conduttori.
Questo risolve il cosiddetto problema di Dirichlet, (conoscenza del potenziale con le
condizioni al contorno espresse dal valore del potenziale sulle superfici di contorno).
Si può però affrontare anche il problema (di Neumann) di ottenere i potenziali sui
conduttori conoscendo il campo perpendicolare agli stessi. Si segue semplicemente la
stessa strada definendo come funzione di Green, la funzione tale che: ∆G = −4πδ (r − R) e
che obbedisce alla condizione di avere la derivata normale alla superficie di contorno
dG
= 0 su Σ (invece di G = 0 su Σ come nel problema di Dirichlet).
uguale a zero:
dn
62
Cap. 3 – I campi
________________________________________________________________________
Posto di nuovo G =
1
r −R
+ X , la funzione X
dovrà stavolta essere soluzione
dell’equazione di Laplace come prima, ma con la condizione al contorno
d
1
) sulla superficie Σ . In conclusione, le condizioni al contorno possono
X =− (
dn r − R
essere o il valore del potenziale o della derivata normale del potenziale, cioè del campo
elettrico perpendicolare a Σ , ma non entrambe. La dimostrazione precedente si basa
sull’assunzione che esiste una soluzione dell’equazione di Laplace dentro Σ che
obbedisca ad un’assegnata condizione al contorno.
La soluzione dell’equazione di Laplace può del resto essere trovata con il metodo del
paragrafo precedente, cioè come combinazione lineare delle soluzioni
A
V (r , θ , φ) = (
+ Br l )Ylm (θ , φ) . I coefficienti della combinazione lineare sono
l +1
r
determinati in modo che le condizioni al contorno siano rispettate. Come si è detto casi
facili sono il problema della sfera conduttrice immersa in un campo costante (di cui ci
occuperemo) e quello del campo di dipolo (di cui ci siamo già occupati).
Un esempio semplice si ha nel caso in cui la superficie Σ sia una sfera di raggio a . La
funzione di Green è in tal caso ( α è l’angolo tra r e R ):
1
a
1
G (r , R) =
−
=
−
2
2
r −R
a2
r
+
R
−
2
rR
cos
α
Rr− 2 R
R
a
ovvero è X = −
Rr−
a
=−
2
1
1
r 2 R2
a2
,
+ a − 2rR cos α
2
. Si vede subito che per R = a ,
2 2
r R
R
+ a 2 − 2rR cos α
R2
a2
cioè sulla sfera, la funzione di Green si annulla. La derivata rispetto alla normale della
funzione di Green è: (
problema è: V =
dG
)R=a =
dn
1
VR = a
4π
∫Σ
r 2 − a2
r 2 + a 2 − 2ra cos α
r 2 − a2
r 2 + a 2 − 2ra cos α
. Pertanto la soluzione del
d Σ , cui va eventualmente aggiunto
l’integrale sul volume di Gρ .
Dimostriamo adesso che la soluzione dell’equazione di Poisson è unica. Se così non fosse,
ρ
ρ
e ∆φ2 = −
con le stesse
se cioè avessimo due funzioni φ1 e φ2 tali che ∆φ1 = −
ε0
ε0
condizioni al contorno, allora la loro differenza φ = φ1 − φ2 sarebbe soluzione
dell’equazione di Laplace: ∆φ = 0 con la condizione al contorno φ = 0 . Integrando il
63
Cap. 3 – I campi
________________________________________________________________________
laplaciano sul volume, avremo:
∫ ∆φdV = ∫ ∇ ⋅∇φdV = ∫ ∇φ ⋅ nd Σ = 0 il che implica che
V
V
Σ
il gradiente ∇φ = 0 . Le due condizioni φ = 0 e ∇φ = 0 , implicano che φ = 0 ovunque
ovvero che φ1 = φ2 e dunque la soluzione è unica.
11. Calcolo del campo magnetico
Calcoliamo adesso il campo magnetico per alcune configurazioni di corrente, facilmente
realizzabili e geometricamente semplici: rette, segmenti, cerchi, cilindri e tori.
Campi magnetici di questo tipo vengono effettivamente realizzati, e sono utilizzati in
macchine costruite per modificare il moto di elettroni.
Talune di queste macchine sono persino di uso domestico come, per esempio, i cinescopi.
a.
Il filo infinito
Un filo infinito percorso da una corrente i obbedisce alla legge di Biot e Savart. Qui
µ ids × r
restituisce appunto il
vogliamo dimostrare che la scelta della formula: B = 0
4π
r3
risultato sperimentale di Biot e Savart. Dato che un filo infinito in realtà non esiste, si
tratta di un problema ideale. Comunque, poiché ipotizziamo che questo filo abbia
lunghezza infinita, dobbiamo cambiare il tipo di integrazione e passare da un integrale su
di una linea chiusa (ogni circuito naturalmente deve chiudersi per permettere il passaggio
∫
della corrente) ad un integrale su di una retta infinita: B = 2
Laplace)
α
ds
r
s
θ
O
x
dB
Fig. 22: Campo generato da un filo infinito
carico.
64
µ0
4π
+∞
∫
0
ids × r
r3
(Formula di
I limiti dell’integrale sono posti qui
a 0 ed a +∞ , come nel caso del
campo elettrico, piuttosto che da
−∞ a +∞ , ed il risultato viene
moltiplicato per un fattore 2. Il
punto dove vogliamo calcolare il
campo magnetico (come mostrato in
fig. 22) è localizzato alla coordinata
x
ed
è
pertanto
costante
nell’integrazione.
Valgono
le
seguenti relazioni geometriche, che
usiamo per ridurre le tre variabili
non indipendenti: r , s , θ ad una
sola: θ .
Cap. 3 – I campi
________________________________________________________________________
x
dθ
e r=
. Notiamo anche che l’unica componente del
2
cos
θ
cos θ
campo magnetico è quella perpendicolare al piano definito dal filo e dalla retta X.
Riferendoci dunque a questa componente, riscriviamo la formula precedente in termini
scalari e sostituiamo:
s = xtgθ ⇒ ds = x
µ
B= 0
2π
=
µ0 i
2π x
+∞
µ
i 2 senα = 0
2π
r
0
∫
π
ds
µ0 i
2
∫ cos θdθ = 2π
0
x
+∞
µ
i 2 cos θ = 0
2π
r
0
∫
ds
senθ
π
0
2
=
π
xdθ cos 2 θ
2
∫
i cos θ
0
cos 2 θ
x2
=
µ0 i
2π x
Si riottiene quindi la formula di Biot e Savart. Come nel caso del campo elettrico, si può
calcolare il campo magnetico generato da un filo di lunghezza 2l sul suo asse,
l π
semplicemente calcolando l’integrale da 0 ad un valore θ 1 = arctg < , dove l è la
x 2
µ i
semilunghezza del filo. In questo caso: B = 0 sin θ1 .
2π x
Proviamo adesso a calcolare il potenziale vettore del filo infinito. La corrente scorre solo
lungo l’asse del filo (Z) pertanto esiste solo la componente lungo tale asse del potenziale
vettore12: A = −
µ
Az = − 0
4π
=
∫
V'
µ0
4π
jdV
∫ r −r '
⇒ Ax = Ay = 0 e
V
jz dx ' dy ' dz '
µ
µ
µ
dz '
=− 0
=− 0 i
= − 0 2i
4π
4π
4π
r −r '
r −r '
r −r '
V'
V'
jz dV '
∫
∫
+∞
∫
0
dz '
x + y 2 + z '2
2
+∞
µ0
µ
i ln( − z '+ x 2 + y 2 + z '2 ) = − 0 i ln x 2 + y 2 + cos t
2π
2π
0
.
Le componenti cartesiane del campo magnetico di Biot-Savart sono:
∂Az
µ i
=− 0 2 y
Bx =
2π r
∂y
A
∂
B = − z = µ0 i x
y
2π r 2
∂x
Si può anche calcolare il potenziale vettore all’interno del filo di raggio R .
12
Ricordiamo che, in realtà, il potenziale vettore è definito a meno del gradiente di una
funzione scalare. Ne segue che, solo se prendiamo tale funzione uguale a zero,
l’affermazione è vera.
65
=
Cap. 3 – I campi
________________________________________________________________________
Si può vedere, usando il teorema di Ampere
campo interno è lineare nel raggio r : B =
∂Az
µ
= − 0 jy
Bx =
2
∂y
∂Az µ0
B
y = − ∂x = 2 jx
da cui deduciamo che Az = −
µ0
2
∫ B ⋅ ds =2π rB = µ
0
jπ r 2 , che il
jr e le componenti sono:
µ0
jr 2 , all’interno del filo.
4
Lasciamo allo studioso lettore il compito di dimostrare, con un calcolo diretto, che
il rotore del campo magnetico è zero all’esterno del filo. Ne segue che, se
consideriamo solo la zona esterna al filo, il campo magnetico può essere anche
descritto come il gradiente di un potenziale scalare. Possiamo trovare la forma di
questo potenziale scalare, notando che le linee di forza sono cerchi (cilindri)
concentrici al filo e, dunque, le equipotenziali devono essere rette (piani) passanti
per il filo stesso. Esprimendo il potenziale con coordinate polari (cilindriche), il
potenziale deve dunque essere solo funzione dell’angolo intorno al filo θ , ma non
della distanza dal filo r
(né della coordinata z
). Dunque
µ0
µ0
y
V (θ ) =
iθ =
i arctan . Infatti il gradiente di questa funzione è:
2π
2π
x
µ i
1 ∂V
∂V
Bθ = −
e Br = −
=− 0
= 0 , come deve essere. Possiamo anche
r ∂θ
2π r
∂r
calcolare il gradiente in coordinate cartesiane e riottenere le componenti scritte
µ
µ
y µ
1 −y
y
∂
sopra:
e
Bx = − 0 i
arctan = 0 i
=− 0 i 2
2
2
2π ∂x
x 2π
2π r
y x
1+ 2
x
µ0 ∂
y µ0
1 1 µ0 x
.
By = −
i arctan =
i
i
=
2π ∂y
x 2π
y 2 x 2π r 2
1+ 2
x
b.
La spira
Calcoliamo adesso il campo magnetico alla coordinata x lungo l’asse di una spira di
raggio R, percorsa dalla corrente i (si veda la fig. 23). Usiamo la stessa formula utilizzata
µ ids × r
in precedenza: B = 0
. Considerando che l’unica componente non nulla del
4π
r3
campo è lungo l’asse X , questa formula può essere riscritta in forma scalare:
∫
66
Cap. 3 – I campi
________________________________________________________________________
Bx =
µ 0 iRrdα sen
µi R
µi R
θ = 0 2 senθ ∫ dα = 0 2 senθ 2π
∫
3
4π
4π r
4π r
r
ds
d Bx
r
α
R
θ
x
X
Occorre notare che θ non cambia al
variare dell’elementino di filo d s ,
R
che senθ =
e che r = R 2 + x 2 .
r
Sostituendo, si ottiene:
µi R
µ i π R2
Bx = 0 2 senθ 2π = 0
=
4π r
2π r 3
=
dBx
µ0 i
µ
m
π R2
= 0
3
2π ( R 2 + x 2 ) 2 2π ( R 2 + x 2 ) 3 2
dove: m = πR 2i è detto “momento
Fig. 23: Campo generato da una spira.
magnetico” della spira ed è uguale
alla
superficie
della
spira
moltiplicata per la corrente.
In effetti, possiamo definire il vettore momento magnetico dandogli la direzione della
perpendicolare al piano della spira: m = iπ R2 i (attenzione a non confondere la corrente,
µ
m
con il versore dell'asse X!) e quindi porre: B = 0
, che per x → ∞ , avrà
2π ( R 2 + x 2 ) 3 2
µ0 m
. Questo momento magnetico è tale che, se la spira viene messa
2π x 3
in un campo magnetico esterno, essa sarà soggetta ad una coppia di forze il cui momento
è: M = m × B . m ha dunque lo stesso significato fisico del momento magnetico di un ago
di magnetite. In effetti, possiamo calcolare il campo magnetico ad una coordinata x
dell’asse di una spira quadrata. Nel caso di una spira quadrata, il campo è dato
semplicemente dalla sovrapposizione dei quattro campi generati dai quattro lati (fili di
µ i
lunghezza finita 2l, si veda paragrafo precedente): B = 0 senθ 1 che però va proiettato
2π x
sull’asse della spira (X), giacché ha la direzione dell’asse del lato. Evidentemente, ogni
l’andamento: B =
componente di B perpendicolare a X è nulla, perché le quattro componenti generate dai
quatto lati si annullano a due a due. In conclusione:
67
Cap. 3 – I campi
________________________________________________________________________
B=4
2l
θ1
Asse del lato r
B
θ
Asse della spira x
=2
µ0 i
sin θ 1 cos θ =
2π r
µ0 i
π r
l
l +r
2
2
l
=
r
=
µ0
i
2
2π l + x 2
=
µ0
2π (l 2 + x 2 ) 2l 2 + x 2
4l 2
2l 2 + x 2
m
=
Fig. 24: Campo generato da una spira quadrata.
µ0 m
, con m = i(2l ) 2 come nel caso della
2π x 3
spira rotonda (qui però si ha una espressione diversa per l’area della spira).
Un’interessante applicazione della spira si ha nella descrizione classica dell’atomo
secondo Bohr. Come vedremo più avanti, l’atomo di Bohr è formato da elettroni (cariche
negative) che ruotano intorno ad un nucleo positivo di protoni e neutroni su orbite
circolari. L’elettrone costituisce una corrente che circola intorno al nucleo: in altre parole
nell’atomo c’è una piccola spira che crea un campo magnetico. Questo concetto,
inizialmente suggerito da Ampere, è utilissimo tra l’altro per capire le interazioni della
materia con il campo magnetico. Il momento magnetico generato dall’elettrone è (in
e
modulo): m = iπr02 e i = , con T= periodo di rotazione dell’elettrone sull’orbita di
T
e
L , notando che il periodo
raggio r0. Possiamo riscrivere questa formula come: m =
2me
2πr0
di rotazione è: T =
e L = r0 × me v . Sempre nello stesso ambito applicativo,
v
possiamo pensare all’elettrone come ad una minuscola sferetta che ruota intorno al proprio
asse. Essendo una sferetta carica, essa genererà ancora un campo magnetico dipendente
dal suo momento magnetico.
Proviamo a calcolarlo. Abbiamo però una scelta da fare: l’elettrone è una sferetta carica
cava o piena? Vedremo che entrambi questi modelli non sono veramente significativi,
perché non è possibile dare una risposta sperimentale a queste domande, tuttavia è
interessante fare questi calcoli che hanno l’interesse di condurre a formule simili a quelle
verificate sperimentalmente.
Proviamo dapprima con una sferetta cava:
A
in questo caso il momento magnetico sarà dato
dalla somma di tanti momenti magnetici,
dS
corrispondenti alle spire indicate come
Per x → ∞ il campo avrà l’'andamento: B =
68
θ
R
Fig. 25: Momento magnetico di
una sfera carica cava.
Cap. 3 – I campi
________________________________________________________________________
superfici dS di area A in fig. 25. La corrente
che percorre ciascuna spira è:
dq σ
di =
= 2πR 2 senθdθ = ωR 2σsenθdθ ,
T
T
essendo σ
la densità di carica e
dS = 2πrRd θ = 2πRsen θRd θ l’areola della
spira.
= π ( Rsenθ ) 2 ωR 2σsenθdθ . Da
Il momento magnetico allora sarà: dm = Adi = πr 2 di =
π
∫
cui infine si ricava che il momento magnetico è: m = πωR σ sen 3θdθ . La direzione del
4
0
momento sarà quella lungo l’asse, ed il verso dipenderà dal verso di rotazione.
4
1
Risolvendo l’integrale, risulta: m = πσωR 4 = eωR 2 . Poiché una sfera carica ha
3
3
e
2
L.
momento della quantità di moto pari a: L = Iω = me R 2ω , risulta che: m =
3
2me
Lasciamo allo studioso lettore di dimostrare che per una sferetta solida, si avrebbe:
m=
c.
e
L . Nei calcoli occorre tenere presente che:
2me
π
4
∫ sen θdθ = 3 .
3
0
Il solenoide
Il solenoide è un cilindro sul cui mantello è avvolto un filo con N spire per unità di
lunghezza percorse da una corrente i (come mostrato in fig. 26). Ai fini del nostro calcolo
Filo percorso dalla corrente
B
Asse
Mantello
Corrente
considereremo un cilindro di lunghezza infinita. Naturalmente queste sono astrazioni, in
pratica ogni cilindro costruito sarà di lunghezza finita e dunque la formula che troveremo
varrà per la zona centrale di un cilindro molto lungo, cioè in una posizione dove ad un
osservatore il cilindro può sembrare infinitamente lungo. Partiamo dalla formula trovata
69
Cap. 3 – I campi
________________________________________________________________________
per una spira: B =
µ0
m
. Dato un punto sull’asse del solenoide, definito dalla
2π ( R 2 + x 2 ) 3 2
coordinata x0, il campo è dato dalla sovrapposizione degli effetti di ogni spira su quel
punto. Le spire comprese tra x e x+dx, che sono in numero di Ndx, produrranno un
µ
m
campo: dB = 0
Ndx . Integrando tra −∞ e +∞ ovvero tra x0 e +∞ ,
2π ( R 2 + ( x − x ) 2 ) 3 2
0
e, moltiplicando per 2, si ottiene:
B=2
µ 0 Ni
µ0
NiπR 2
2π
+∞
∫ (R
x0
+∞
dx
2
+ ( x − x0 ) )
2
∫
2
x0
x − x0
( R + ( x − x0 ) )
2
2
1
)=
2
+∞
x − x0
( R 2 + ( x − x0 ) 2 )
3
= µ 0 Ni d (
1
= µ 0 Ni
2
x0
Questo integrale lo abbiamo già incontrato nel calcolo del campo elettrico generato da un
filo carico. Come si vede il campo magnetico è costante sull’asse del solenoide. In realtà,
usando la legge di Ampere:
∫ B ⋅ ds = µ i , si può vedere che è costante all’interno
0
dell’intero volume del solenoide.
Applichiamo la legge di Ampere ad un cammino rettangolare con un lato sull’asse del
solenoide, un secondo lato parallelo al primo, ma fuori dell’asse, e gli altri due lati
infinitesimi e dunque con contributo nullo, congiungenti i due segmenti assiali (fig. 27).
Poiché non ci sono correnti concatenate l’integrale deve essere nullo.
D
C
Asse
A
l
B
Fig. 27: Cammino rettangolare utilizzato per applicare la legge di Ampere.
Trascurando allora i due contributi dei lati verticali, perché l’integrale sia nullo, occorre
che i due contributi dai lati assiali siano uguali e di segno contrario:
B
∫
D
∫
C
∫
B ⋅ ds = Bl = − B '⋅ds = B '⋅ds = B ' l . In conclusione: B=B’. Spostandosi di un
A
C
D
infinitesimo fuori asse il campo magnetico resta lo stesso. Evidentemente possiamo
spostarci dal segmento CD ad un altro un po’ più fuori asse, trovare lo stesso risultato e
così via.
d.
70
Il toroide
Cap. 3 – I campi
________________________________________________________________________
Il toroide è un cilindro ripiegato ad anello. Supponiamo di avere avvolto N spire di filo
percorse da una corrente i sul mantello esterno del toro. Ci aspettiamo che il modulo del
campo magnetico B = B non dipenda da θ e φ , ma al più da r (si veda fig. 28).
Tuttavia il vettore campo magnetico deve cambiare la sua direzione al variare di
φ, essendo perpendicolare alla sezione traversa del toroide nel punto in cui lo calcoliamo.
Possiamo a questo punto calcolare B usando la legge di Ampere che ci dà la circuitazione
di B :
∫ B ⋅ dl = µ ∑i
0
k
= µ 0 Ni , essendo la somma delle correnti concatenate il prodotto
k
del numero totale di spire per la corrente i. Dalle condizioni di simmetria descritte prima si
µ N i
deduce che: B ⋅ dl = B 2πr = µ 0 Ni , da cui risulta: B = 0
. Il campo quindi non è
2π r
constante nel toroide come lo era nel solenoide.
Z
∫
Y
φ
r
X
Spire
B
Fig. 28: Campo magnetico generato da un toroide.
e.
Il dipolo magnetico
Abbiamo visto che il potenziale vettore obbedisce all’equazione di Poisson:
∆Ax = − µ0 j x
ρ
∆Ay = − µ0 j y (come il potenziale scalare ∆V = − ).
ε
0
∆Az = − µ0 jz
j x dV '
µ
Le soluzioni si possono scrivere nella forma: Ax = 0
…
4π
r − r'
∫
V'
Anche per il potenziale vettore si può fare l’espansione in multipoli. Occorre
1
1 xx '+ yy '+ zz '
1 r ⋅r '
prendere lo sviluppo:
= +
+ ... = + 3 + ... identico a
3
r −r' r
r
r
r
quello usato per il campo elettrico. Il primo termine dà il potenziale del
71
Cap. 3 – I campi
________________________________________________________________________
µ0 jdSds µ0
i ds , con ds clementino di circuito
=
4π V∫' r
4π r ∫
orientato come la densità di corrente e dS sezione traversale del filo. L’integrale
∫ ds sulla linea chiusa del circuito dà zero13. Niente campo magnetico di
monopolo:
A=
monopolo!
Il secondo termine si può riscrivere nella forma:
m=
1
2
∫ (r '× j )dV ' ,
A=
µ0 m × r
4π r 3
, con
affine al potenziale scalare di un dipolo elettrico
V'
V (r ) =
d ⋅r
1
che genera il campo elettrico (orientando il dipolo elettrico
4πε 0 r 3
lungo l’asse Z ( d z = d )):
1 3dxz
Ex =
4πε 0 r 5
1 3dyz
Ey =
4πε 0 r 5
1 d
(3 z 2 − r 2 )
Ez = −
5
πε
4
0 r
Infatti,
r × (r '× j ) = (r ⋅ j )r '− ( r ⋅ r ') j ⇒ ( r ⋅ r ') j = −( r '× j ) × r + ( r ⋅ j )r ' .
può mostrare che
Si
∫ (r ⋅ j )r ' dV ' = − ∫ (r ⋅ r ') jdV ' per cui:
V'
V'
∫ (r ⋅ r ') jdV ' = r × ∫ (r '× j )dV ' + ∫ (r ⋅ j )r ' dV ' ⇒ 2 ∫ (r ⋅ r ') jdV ' = r × ∫ (r '× j )dV '
V'
V'
V'
V'
V'
sostituendo nell’integrale, si ha:
µ 1
µ m×r
A = 0 3 ( r ⋅ r ') jdV ' = 0
4π r
4π r 3
V'
∫
Vogliamo vedere se il campo magnetico che otteniamo dal potenziale vettore
appena calcolato ha lo stesso andamento.
B = ∇× A =
µ0
m×r
∇× 3 .
4π
r
Facciamo un calcolo diretto, come si è fatto
nel caso del campo elettrico. Abbiamo:
13
Attenzione:
72
∫ ds = l lunghezza del filo.
Cap. 3 – I campi
________________________________________________________________________
m×r
r
3
=
1
r
3
i
j
0
0 m =
y z
x
k
( − myi + mxj )
r3
, da cui otteniamo per il rotore:
i
j
k
3 xz
2
µ
µ
∂
∂
∂
3 zy
y2
x2
∇× A = 0 m
= 0 m 5 i + 5 j + 3 −3 5 −3 5 k =
r
4π
∂x ∂y ∂z 4π r
r
r
r
y
x
− 3
0
r
r3
3 xz
2
µ
3 xy
(r 2 − z 2 )
= 0 m 5 i + 5 j + 3 −3
k =
r
4π r
r
r5
k
Da questa si vede che l’andamento del campo di dipolo elettrico e di quello di
dipolo magnetico sono uguali. Per le linee di forza vedere dunque le linee di forza
del campo elettrico di dipolo. In effetti ciò che abbiamo dimostrato è che
µ
µ
m×r
m⋅r
B = ∇ × A = 0 ∇ × 3 = − 0 ∇ ( 3 ) = −∇ϕ . Si può dimostrare (Mel
4π
4π
r
r
jdV
Schwartz - Principles of electrodynamics pag. 149) che per A( r ') =
è
r −r'
=
r 2 − 3z 2
µ0 3 xz
3 zy
m 5 i + 5 j −
r5
4π r
r
∫
V
sempre vero che ∇ × A = −∇ϕ , purché si sia in una regione di spazio in cui non
possa essere r = r ' , ovvero nella regione dove non ci sono correnti. Dunque in
tali regioni è sempre possibile far derivare il campo magnetico da un potenziale
scalare. In conclusione, abbiamo calcolato il campo sull’asse di una spira, cioè di
un dipolo magnetico, usando il principio di sovrapposizione dei campi, ma non
abbiamo potuto, con esso, calcolare lo stesso fuori dall’asse; abbiamo adesso
trovato il campo magnetico su tutto lo spazio (lontano dal dipolo) e abbiamo
verificato che esso è uguale a quello di un dipolo elettrico, cosa che si poteva
prevedere perché il campo magnetico lontano dalle correnti che lo generano deve
potersi derivare da un potenziale scalare che è poi quello del campo elettrico di
dipolo. Comunque notiamo che sull’asse Z , il campo appena calcolato si riduce a
Bx =
µ0 m
2π z 3
che abbiamo visto essere il limite per
col metodo della sovrapposizione dei campi.
73
z → ∞ del campo calcolato
Cap. 3 – I campi
________________________________________________________________________
µ0 m × r
. Notare che questa soluzione, come del
4π r 3
resto quelle precedenti, del filo indefinito e della spira singola, ha divergenza nulla, cioè
obbedisce alla condizione di Lorentz.
Questo potenziale ha una divergenza a r = 0 . Possiamo avere una forma ragionevole del
potenziale vettore per la spira (e poi per il solenoide), se lo modifichiamo, scrivendo (
R = raggio della spira):
µ
µ
y
x
Ax = − 0 m 2
, Ay = 0 m 2
, che non hanno divergenze a
2
3/
2
4π ( R + r )
4π ( R + r 2 )3/ 2
Il potenziale vettore del dipolo è A =
r = 0 . Calcoliamo il campo magnetico della spira. A distanza grande dall’asse
r 2 = x 2 + y 2 + z 2 >> R2 , l’espressione si riduce a quella di prima e otteniamo il solito
campo dipolare. In prossimità dell’asse Z ( ρ 2 = x 2 + y 2 ≤ R2 ), abbiamo:
µ0
µ0
µ0 ( R2 + ρ 2 ) − 3( x 2 + y 2 )
3 zy
3 zx
m 2
,
B
m
,
B
m
=
=
4π ( R + ρ 2 + z 2 )5/ 2 y 4π ( R 2 + ρ 2 + z 2 )5/ 2 z 4π
( R2 + ρ 2 + z 2 )5/2
e, in particolare, sull’asse della spira ( x = 0, y = 0 ), il campo si riduce a:
Bx =
Bx = B y = 0, Bz =
µ0
µ0
1
R2
m 2
i
=
che è la formula calcolata
4π ( R + z 2 )3/2
4 ( R 2 + z 2 )3/ 2
precedentemente.
Se le componenti del potenziale vettore per una spira, sono: Ax = −
Ay =
µ0
y
m
e
4π ( R 2 + z 2 )3/ 2
µ0
x
m 2
, (per ρ 2 < R2 ), otteniamo il potenziale vettore nel solenoide,
2
3/
2
4π ( R + z )
moltiplicando per il numero di spire per unità di lunghezza (n) e sommando su tutte le
spire. Troviamo:
Ax == −
=−
µ0
4
µ0
4
+∞
R 2 niy
∫ (R
−∞
1
2
+z )
2
+∞
niy
z
R2 + z 2
E similmente: Ay =
=−
µ0
−∞
µ0 ni
2
3
2
2
dz = −
µ0
4
+∞
R 2 niy
1
∫R
2
z
d(
R2 + z 2
−∞
)=
niy
∂A y
x , infine: B = B z =
−
∂x
∂Ax
= µ 0 ni .
∂y
Calcolando ora il campo lontano dall’asse ρ >> R2 (fuori dal solenoide), si ha, dopo
2
integrazione sulle spire ( ρ 2 = x 2 + y 2 ):
Ax == −
74
µ0
mny
4π
+∞
∫ (ρ
−∞
1
2
+z )
2
3
2
dz = −
µ0
mny
4π
+∞
1
∫ρ
−∞
2
d(
z
ρ +z
2
2
)=−
µ0
2π
mn
y
ρ2
Cap. 3 – I campi
________________________________________________________________________
e Ay =
Bx = −
By =
Bz =
µ0
2π
mn
x
ρ2
il cui rotore è:
µ0
∂ x
mn
=0,
2π
∂z ρ 2
µ0
2π
mn
∂ −y
( )=0
∂z ρ 2
1 2 x2
µ0
µ
1 2 y2
∂ x
∂ −y
mn( ( 2 ) − ( 2 ) = 0 mn 2 − 4 + 2 − 4
ρ
2π
2π
∂x ρ
∂y ρ
ρ
ρ
ρ
=
2ρ 2 − 2 x2 − 2 y2
µ0
mn
2π
ρ4
= 0
Il campo risulta così nullo fuori del solenoide, come avevamo trovato precedentemente.
In conclusione, possiamo prendere come potenziale vettore della spira:
µ
µ
y
x
Ax = − 0 m 2
, Ay = 0 m 2
, che dà per il solenoide:
2
3/
2
4π ( R + r )
4π ( R + r 2 )3/ 2
=
µ0
µ
y
x
mn 2 e Ay = 0 mn 2 fuori del solenoide e
2π
2π
ρ
ρ
µ ni
µ ni
Ax = − 0 y e Ay = 0 x dentro il solenoide, potenziali che a loro volta danno un
2
2
campo magnetico Bz = 0 e Bz = µ0 ni , rispettivamente fuori e dentro il solenoide.
Abbiamo anche ricavato il campo sull’asse della spira correttamente. Per ρ ≅ R , usando
la soluzione completa del potenziale vettore, si ha per il solenoide:
µ
µ0
R2
R2
e
, da cui otteniamo il campo magnetico
Ax = − 0 niy 2
A
nix
=
y
2
2
R + ρ2
R2 + ρ 2
Ax = −
esatto: Bz = µ0 ni
sull’asse:
Bz
=
R4
( R 2 + ρ 2 )2
1
. Possiamo scrivere che il rapporto tra il campo e il campo
con x =
ρ
. Da questo si vede che il campo magnetico non è
R
µ0 ni (1 + x )
costante dentro, ma cala verso l’esterno, sul mantello del cilindro ha un valore pari ad un
quarto del valore sull’asse e che all’esterno il campo cala verso lo zero abbastanza
lentamente. Lasciamo allo studioso lettore il compito di fare un grafico di questa
funzione.
µ
jdV
Infine notiamo che l’integrale: A = 0
è calcolato nel Jackson, p.146.
4π
R−r
2 2
∫
Nel caso di un campo costante lungo un asse (Z), abbiamo
75
Cap. 3 – I campi
________________________________________________________________________
Componenti del ∇ × A :
∂Az ∂A y
−
=0
∂z
∂y
∂Ax ∂Az
−
= 0 che implicano:
∂x
∂z
∂A y ∂Ax
−
= Bz
∂y
∂x
Bz
Ax = − 2 y
Bz
x
Ay =
2
Az = 0
Si tratta dello stesso potenziale vettore che in un solenoide, dove, appunto, il
campo magnetico è costante. Basta sostituire a B z il suo valore µ 0 ni .
Anche per il dipolo magnetico abbiamo un campo tra i poli che può essere costante
sagomando i poli in maniera acconcia. In effetti anche il campo magnetico è sempre
perpendicolare al ferro usato per i poli magnetici, per ragioni che vedremo più avanti.
Così sagomando i poli magnetici piatti si ottiene un campo magnetico costante. I poli però
possono essere anche sagomati in modo da dare un campo non costante per usi vari in
particolare nei magneti per gli acceleratori. Per esempio per il cosiddetto “focheggiamento
debole” negli acceleratori si vuole un campo dipolare con la componente verticale del
campo con l’andamento:
By = By 0 (
x0 n
) , con 0 < n < 1 . Poiché tra le espansioni polari
x
deve essere: ∇ × B = 0 , allora sarà:
∂B y
B y 0 x0 n
B y ∂Bx
By
xn
∂Bx
( ) = −n
y = − nB y 0 n0+1 y
= 0 ⇒ −n
=
⇒ Bx = − n
x x
x
x
x
∂x
∂y
∂y
B y 0 x0n
Il campo magnetico è il gradiente del potenziale scalare: V = −
y+C .
xn
In figura abbiamo le linee di campo e due equipotenziali per n = 0, 5 . Se le
−
espansioni polari seguono queste due equipotenziali, il campo sarà quello
disegnato. Abbiamo usato: x0 = 1m; B y 0 = 1T .
La forza agente su una particella che si muova lungo l’asse Z a
x = x0 , y = 0 ,
n
0
n +1
x0 n
x
) e Fy = − nev z B y 0
y . Una particella che si
x
x
muova lungo Z, ma fuori dall’asse X, ad x = x0 , avrà un moto lungo Y,
sarà:
Fx = −evz By 0 (
xn
en
B y 0 v z n0+1 y = 0 , che, posto , cosa
m
x
en
1
2
possibile se n > 0 , ωV =
, diventa: ɺɺ
y + ωV2 y = 0 , l’equazione
B y 0v z
m
x0
determinato dall’equazione
76
ɺɺy +
Cap. 3 – I campi
________________________________________________________________________
diventa quella dell’oscillatore armonico. La particella avrà allora un moto di
oscillazione lungo l’asse Y. Queste sono chiamate oscillazioni di betatrone.
Polo negativo
Polo positivo
Il principio di funzionamento del betatrone sarà studiato nel prossimo corso. Nella figura,
abbiamo uno schizzo della macchina e del suo campo.
Z
X
77
Cap. 3 – I campi
________________________________________________________________________
Precisiamo qui che il betatrone è un acceleratore di particelle che ha un vantaggio su altri
acceleratori: quello di avere una camera a vuoto piccola. Infatti avendo le particelle una
traiettoria di raggio costante, esse possono essere incluse in un toroide. Solo in questo
occorre fare il vuoto. La cosa che vogliamo qui esaminare è il problema del
focheggiamento del fascio. Poiché le particelle non possono veramente essere iniettate
nella macchina con le giuste condizioni iniziali, - velocità esattamente tangenti alle orbite
nelle macchine con il giusto valore per rimanere sull’orbita circolare nel punto
d’iniezione - occorre che forze elettromagnetiche all’interno della macchina provvedano a
tenere i fasci in prossimità dell’orbita stabile.
Il campo magnetico cui gli elettroni sono soggetti all’interno della macchina può essere
modificato in maniera opportuna lavorando i poli del magnete. Poiché, infatti, il campo
magnetico deve essere perpendicolare al metallo la forma del ferro può essere usata per
dare al campo magnetico la giusta forma ed intensità. Costruiamo un campo del tipo
dipolare appena visto, lavorando le superfici del metallo nella forma dell’equipotenziale,
come visto.
Abbiamo visto che con un tale campo la traiettoria della particella sarà un’oscillazione
lungo l’asse verticale. abbiamo: evz Bx = m
d2y
. Sagomiamo i poli in modo da avere:
dt 2
x0 n
) , n è detto “indice di campo”. Possiamo riscrivere la frequenza delle
x
By
v
oscillazioni verticali come: ωV = nω0 , dove ω0 = e
=
si chiama “frequenza
m x0
By ( x) = By 0 (
di betatrone” ed è la frequenza angolare del moto sull'orbita stabile. L’equazione trovata è,
in effetti, l’equazione dell’oscillatore armonico, se n > 0 , che è così la condizione per la
stabilità verticale. Per piccoli spostamenti ρ = x − x0 , rispetto al raggio x0 , avremo:
m
2
dF
d 2ρ
= Fx ( ρ ) = Fx (0) + x ρ , dove: Fx ( x) = m v − evB y ( x) e
2
x
dt
dx
m ρɺɺ = −m
v2
x02
ρ − ev
∂B y ( x0 )
∂x
ρ = −m
v2
x02
ρ +n
evBy ( x0 )
x0
⇒ ρɺɺ = −
v2
x02
Fx ( x0 ) = 0 .
ρ + n(
Perciò:
eBy ( x0 )
m
)(
v
)ρ =
x0
= (−ω + nω ) ρ
2
2
Finalmente: ρɺɺ + (1 − n)ω 2 ρ = 0 , che è di nuovo l’equazione dell’oscillatore armonico, se
n < 1 . In conclusione, perché le particelle oscillino intorno alla traiettoria stabile, occorre
che l’indice di campo n, sia maggiore di zero e minore di uno. La frequenza di betatrone e
le frequenze di oscillazioni orizzontale e verticale (oscillazioni di betatrone) sono dunque
dello stesso ordine di grandezza, ma con quest’ultima una frazione della prima.
Calcoliamo il valore numerico della frequenza di betatrone per un protone in un campo di
1 Tesla:
78
Cap. 3 – I campi
________________________________________________________________________
ω0 = e
By
m
= 1, 6 ⋅10−19 C
1T
≈ 1011 rad ⋅ s −1
−30
10 kg
La tensione variabile usata per il betatrone è quella di rete a 60Hz (50Hz negli USA).
Dunque l’accelerazione deve tutta avvenire in un quarto di periodo. Infatti occorre che la
tensione aumenti (o diminuisca a secondo della carica degli ioni) e produca il giusto segno
del raggio di curvatura. Dunque tutta l’accelerazione si ha in 17ms. In questo tempo il
numero di rivoluzioni compiute sarà: 17 ⋅10 −3 ⋅ 2πω 0 ≅ 10 10 , per raggiungere un'energia
di 100MeV occorrerebbe dunque guadagnare un’energia di 10-2 eV per rivoluzione.
Dunque 17ms sono più che sufficienti e l’accelerazione può durare molto meno. Il lavoro
dB
.
fatto dal campo elettrico indotto sull’elettrone è: e ∫ E ⋅ d l = 2πreE = πr 2
dt
Un esempio di quadrupolo magnetico.
Un “quadrupolo” è il magnete in figura. Si vuole, in certe applicazioni, ottenere
componenti del campo magnetico :
Bx = by , B y = bx e Bz = 0 . Troviamo le
equazioni delle linee di forza e delle equipotenziali, assumendo che si possa descrivere il
campo magnetico con un potenziale scalare nella zona tra le espansioni polari.
-
X
+
+
∂V
∂V
= − By = −bx ; dunque:
= − Bx = −by ,
∂x
∂y
∂B
∂B
V = −bxy + costante, con b = z = x .
∂x
∂z
Il potenziale scalare V è tale che:
Le linee di forza sono tangenti al campo e dunque:
dy B y x
y2
x2
x2 y2
=
= ⇒ ydy = xdx ⇒
+C =
⇒
−
=1
dx B x
y
2
2
2C 2C
Delle iperboli con gli asintoti a 45°, ovvero in forma canonica.
79
Cap. 3 – I campi
________________________________________________________________________
Dalla forma del potenziale V = −bxy + costante, ricaviamo per le equipotenziali (V=
costante): y = −
dy
y
C
C −1
C
⇒
= 2 =−
= − , come si vede i due coefficienti
dx bx
bx x
x
bx
dy
sono nella relazione giusta perché le due curve siano perpendicolari.
dx
In figura abbiamo equipotenziali e linee di forza per questo campo
Le curve continue sono le linee di forza, quelle tratteggiate sono le equipotenziali che
danno anche la forma delle espansioni polari.
angolari
Le forze agenti su una particella dotata di velocità lungo l’asse Z, sono
Fx = −evz bx e
Fy = evz by . L’equazione del moto sui due piani XZ e YZ sono allora:
evz b
ev b
ρ = 0 e ɺɺy − z y = 0 , con ρ = x − x0 . La prima delle quali è, posto
m
m
ev b
ω 2 = z , l’equazione dell’oscillatore armonico. Il nostro quadrupolo focalizza
m
ρɺɺ + 2
dunque sul piano XZ, ma non focalizza sul piano YZ.
80
Cap. 3 – I campi
________________________________________________________________________
Polo
positivo
Polo
negativo
Polo
negativo
Polo
positivo
13. Il campo elettrostatico e il campo magnetostatico nella materia
Un atomo è un sistema neutro, ma anche un sistema neutro in genere produce un campo
elettrico al suo esterno se, per esempio, esso possiede un momento di dipolo. Anche se
l’atomo non possiede un momento di dipolo originariamente, l’insieme delle cariche
nell’atomo soggetto ad un campo esterno si dispongono in una maniera diversa e
potranno in genere acquisire un momento di dipolo. Pensiamo dunque il dielettrico come
un sistema di dipoli. Cosa accadrà a questi dipoli soggetti al campo elettrostatico esterno?
Evidentemente essi si disporranno lungo la direzione del campo elettrico esterno. Non
possiamo aspettarci che ogni dipolo si disponga esattamente lungo le linee di forza del
campo, perché in generale l’agitazione termica glielo impedirà creando disordine dove il
campo elettrico tende a creare ordine, ma tipicamente si formerà un momento di dipolo
medio lungo la direzione del campo esterno.
81
Cap. 3 – I campi
________________________________________________________________________
Senza campo esterno, i
dipoli non hanno
un’orientazione
Con il campo esterno, i
dipoli sono orientati
Dunque un campo elettrico (magnetico) costante diretto lungo l’asse Z viene
applicato ad un pezzo di materiale dielettrico (gas, liquido o solido isotropo e
omogeneo). I dipoli elettrici (magnetici) atomici si allineano lungo l’asse del
campo, ma a causa dell’agitazione termica non potranno essere tutti allineati
lungo questa direzione. Ci si domanda quale è il momento elettrico di dipolo
medio < pZ > lungo Z.
L’energia di un dipolo è data da: U = − p ⋅ E = − pE cos θ ( U = −d ⋅ B ), così
l’energia di una molecola sarà: U = ε − pE cos θ , dove ε è l’energia cinetica.
Il numero di molecole con energia tra U e U+dU è:
e
dn
= +∞
N
−
∫e
(ε − pE cos θ )
kT
dxdydzdp
−
x dp y dp z d (cos θ )
(ε − pE cos θ )
kT
dxdydzdp
=
x dp y dp z d (cos θ )
−∞
=
e
+∞
∫e
−
−
ε
kT dxdydzdp
ε
kT dxdydzdp
−∞
pE cos θ
kT
x dp y dpz e
+1
x dp y dpz
∫e
d (cos θ )
pE cosθ
kT
d (cos θ )
−1
Integrando sullo spazio delle fasi, risulta che la frazione sul totale delle molecole
con coseno dell’angolo tra cosθ e cos θ + d (cos θ ) , è:
pE cos θ
dn
e kT d (cos θ )
. Per ottenere il valore medio di
= +1 pE cos
θ
N
e kT d (cos θ )
∫
cosθ
82
−1
e integrare:
cosθ , occorre moltiplicare per
Cap. 3 – I campi
________________________________________________________________________
+1
+1
cos θ =
∫
−1
dn
cos θ =
N
∫
cos θ e
−1
+1
∫e
pE cos θ
kT
pE cos θ
kT
d (cos θ )
=
d (cos θ )
−1
=
+1
d
d
a
−e − a + e a
ln e ax dx =
ln
= −a
da
da
a
−e + e a
−1
∫
=−
1 e −a + e a
1
+
= − + coth(a ) = L(a )
a e a − e −a
a
−e − a + e a e −a + e a
+
−
a
a2
(Funzione
di
Langevin),
=
avendo
posto
pE
. Si vede che per E → +∞ , L(a) tende asintoticamente ad 1
kT
(saturazione) e che lim L(a) = 0 . Per a << 1 , sviluppando in serie di McLauren, si ha
x = cosθ e a =
a →0
c e dunque14: cos θ = −
1
a
+ coth(a ) ≈ 15, da cui, infine, si ricava che il momento di
a
3
dipolo medio lungo Z è:
pz = p
cui
pE
p2E
p2 E
, e la polarizzazione è: P = N 0
in
=
3kT
3kT 3kT
N 0 = numero di dipoli (molecole) per unità di volume.
Sottoponendo un dielettrico ad un campo elettrico esterno, si forma dunque una
polarizzazione proporzionale al campo elettrico. Tutto ciò crea un momento di
dipolo complessivo nel materiale dato da: d =
∫ PdV = ∫ ρr dV . Si può poi
V
14
V
Il momento di dipolo della molecola d’acqua è: p = 1,85 ⋅ 10−30 C ⋅ m = 1,85 Debye e
kT = 4,14 ⋅ 10−21 J a T = 300 K . Ne segue che a << 1 per campi elettrici fino a valori
a
dell’ordine di ∼ 109 V / m . Si può ottenere che L(a ) = + ... , anche sviluppando gli
3
pE cos θ
kT
pE cos θ
, prima di integrare.
kT
15
Lo sviluppo in serie di L(a) porta a considerare la derivata prima di
esponenziali e
−a 2
(e − e ) − (e + e )
1
+ 2 e che al limite per
a
−a 2
(e − e )
a
a
risulta
−a 2
≃ 1+
a
può dimostrare usando la regola dell’Hopital.
83
L(a) , che
1
a → 0 tende a , come si
3
Cap. 3 – I campi
________________________________________________________________________
dimostrare
d=
che
∫ PdV = ∫ ρr dV = − ∫ r ∇ ⋅ PdV ,
V
da
cui
segue
che
V
V
∇ ⋅ P + ρ = 0 . In effetti:
F1
1,0
Funzione di Langevin
0,8
0,6
0,4
0,2
0,0
2
4
6
8
10
a
∂Px
∫ r ∇ ⋅ PdV = ∫ x( ∂x
V
+
V
∫
+ x(
V
=(
∂Py
∂y
+
∂Py
∂y
+
∂Pz
)dxdydzi + ... =
∂z
∂Px
∫ x ∂x dxdydzi +
V
∂Pz
∂
)dxdydzi + ... = (
( xPx )dxdydzi − Px dxdydz )i +
∂z
∂x
∂
∫
∫
V
V
∂
∂
∫ ∂y ( xP )dxdydzi + ...
y
V
∂
∫ ∂x ( xP )dxdydz + ∫ ∂y ( xP )dxdydz + ∫ ∂z ( xP )dxdydz )i + ... − ∫ P dV i − ∫ P dV j
x
y
V
z
V
x
V
y
V
V
∫
∫
∫
∫
∫
V
V
V
V
V
− Pz dV k = i ∇ ⋅ ( xP )dxdydz + j ∇ ⋅ ( yP )dxdydz + k ∇ ⋅ ( zP )dxdydz − PdV
Gli integrali
∫ ∇ ⋅ ( xP )dxdydz = ∫ ( xP ) ⋅ ndS
V
e simili sono nulli, perché la polarizzazione
S
è nulla sulla superficie, prendendo una superficie adeguata. Pensiamo ad un blocchetto di
dielettrico soggetto ad un campo esterno, la superficie S può essere scelta come una
superficie che contiene l’intero blocchetto, appena fuori del blocchetto. Scegliendo in tal
modo la superficie si modifica anche il volume d’integrazione, ma evidentemente gli
integrali sul volume non cambiano, mentre quello di superficie si, almeno che non sia
nullo.
84
Cap. 3 – I campi
________________________________________________________________________
∫ ρr dV = −∫ r ∇ ⋅ PdV ⇒ ∇ ⋅ P + ρ = 0 , dove la densità di carica va
Da cui:
V
V
intesa come densità di carica di polarizzazione
ρ P . Il potenziale generato da un dipolo in
un punto a distanza R = ( x − ξ ) + ( y − η ) + ( z − ζ )2
2
3): ϕ =
p⋅ R
1
4πε 0 R 3
2
(dal dipolo) è (vedere capitolo
. Possiamo riscrivere questa formula per un momento di dipolo
PdV = Pd ξ dηd ζ :
1 P⋅R
1
1
1
P
1
dV =
( P ⋅ ∇( ))dV =
(∇( ) − ∇ ⋅ P )dV 16
4πε 0 R 3
4πε 0
R
4πε 0
R
R
Che, integrando su tutto il dielettrico, dà:
1
P
1
1
P
∇⋅P
(∇ ( ) − ∇ ⋅ P )dV =
(−
dV +
ϕ ( x, y, z) =
⋅ ndS ) formula che
4πε 0
R
R
4πε 0
R
R
dϕ ( x , y, z ) =
∫
∫
∫
V
V
S
possiamo interpretare dicendo che il potenziale è dato dal contributo di una densità di
carica superficiale σ P = P ⋅ n e dal contributo di una densità di carica di volume
ρ P = −∇ ⋅ P : ϕ =
essere:
1
4πε 0
(
∫
S
σP
R
dS +
∫
V
ρP
R
dV ) . Essendo poi il dielettrico neutro, dovrà
0 = ∫ σ P dS + ∫ ρ P dV .
S
D’altra parte, abbiamo:
V
∇⋅E =
ρ + ρP
ε0
, in cui abbiamo designato con
ρ la densità di
carica “vera”. Troviamo: ∇ ⋅ (ε 0 E ) = ρ + ρ P = ρ − ∇ ⋅ P ⇒ ∇ ⋅ (ε 0 E + P ) = ρ . Posto
allora D = ε 0 E + P , troviamo infine:
∇⋅ D = ρ .
Poiché abbiamo dimostrato che P = ε 0 N 0
p2 E
= ε 0 χ E , possiamo dire che:
3kT ε 0
D = ε 0 E + P = ε 0 (1 + χ ) E = ε 0 ε r E = ε E , con:
16
Osserviamo che R è la differenza tra i vettori di posizione del momento di dipolo (
ξ ,η , ζ ) e del punto d’osservazione ( x , y , z ): R = ( x − ξ )2 + ( y − η )2 + ( z − ζ )2 . La
derivazione di 1 / R va fatta rispetto alle variabili greche non a quelle latine. In tal caso:
R
1
) , mentre la derivazione rispetto alle latine dà la stessa cosa, ma con un segno
R
R
meno davanti.
3
85
= ∇(
Cap. 3 – I campi
________________________________________________________________________
ε r = 1 + χ ( ε r = costante dielettrica relativa, ε = ε 0 ε r = costante dielettrica e χ =
suscettività). Come si vede, la costante dielettrica relativa è maggiore di 1.
Se oltre al momento di dipolo o al posto del dipolo permanente della molecola, si deve
considerare un momento indotto dal campo elettrico esterno, allora si pone:
p
pz = ( p
+ α p ) E , con α P la “polarizzabilità” del mezzo e si trova:
3kT
P = N 0 (α P +
1 p2
p2
(
+αp).
) E , da cui17: ε r = 1 + N 0
ε 0 3kT
3kT
Prendiamo adesso un condensatore piano tra le cui armature possiamo inserire un
dielettrico di costante dielettrica relativa ε r .
+
E0 +
+
+
+
-
+++++-
+++++-
2
1
17
Per l’acqua per cui ε r = 80 (statica) si trova: α p = 20, 9 ⋅ 10 −39 C ⋅ m 2 / V . Ad alta
frequenza la polarizzabilità diventa nulla e ε r scende a circa 2, come si avrebbe se la
molecola fosse non polarizzabile. L’indice di rifrazione n = ε r diviene allora 1,33. Per
l’elio, che non ha un momento di dipolo intrinseco, la polarizzabilità è:
αp
ε0
= 2, 5 ⋅ 10−30 m 3 , da cui si ha: ε r = 1.0000678 ( n = ε r = 1, 000033 ). Abbiamo
preso: N 0 =
86
6.02 ⋅ 1023 mol
22, 4 ⋅ 10−3 m 3
= 0, 27 ⋅ 1026 mol / m 3 .
Cap. 3 – I campi
________________________________________________________________________
E0 ed E rispettivamente i campi prima e dopo l’inserzione del dielettrico.
La differenza di potenziale prima e dopo l’inserzione saranno: ∆V0 = E0 l e ∆V = El ,
Chiamiamo
con l distanza fra le armature. Abbiamo:
ρ + ρP
⇒ ∇ ⋅ (ε 0 E + P) = ∇ ⋅ D = ∇ ⋅ (ε 0ε r E ) = ρ = ∇ ⋅ (ε 0 E0 ) ,
ε0
cui: E = E0 / ε r e per conseguenza: ∆V0 = ε r ∆V > ∆V , cioè con l’inserzione
dielettrico la differenza di potenziale si abbassa proprio di ε r .
∇⋅E =
da
del
Guardiamo adesso alla superficie di separazione tra due dielettrici. Supponiamo che non
ci siano cariche vere sulla superficie. Abbiamo allora che:
∫ D • ndS = 0 Prendiamo un
S
cilindro di altezza infinitesima con le basi parallele all’interfaccia tra i due dielettrici e
applichiamo il teorema di Gauss:
0 = Φ( D) = D1n dS1 − D2 n dS 2 ⇒
D1n = D2 n , ovvero: la componente normale del vettore induzione elettrica è continua
nel passaggio tra due dielettrici (se la carica all’interfaccia è nulla, altrimenti:
D1n − D2n = dq .
Questo evidentemente implica:
ε r E1n = ε r E 2 n , ovvero la componente normale del
1
2
campo elettrico è discontinua e il rapporto tra le componenti normali nei due mezzi è
inversamente proporzionale al rapporto tra le costanti dielettriche relative.
1
E 1t
D1t
2
D 2n
E 2t
Calcolando la circuitazione del campo elettrico sul percorso di figura, deve essere:
∫ E • d l = 0 . Cioè: E
1t
= E 2t .
Ovvero: la componente parallela del campo elettrico è continua nel passaggio tra due
dielettrici.
87
Cap. 3 – I campi
________________________________________________________________________
ε r1 E1 cos θ 1 = ε r2 E 2 cos θ 2
In conclusione, usando entrambe le relazioni, si ha:
E1 sin θ 1 = E 2 sin θ 2
dividendo membro a membro, dà:
tgθ 1 ε r1
=
.
tgθ 2 ε r2
θ1
1
che
E1
E2
2
θ2
In conclusione c’è “rifrazione” delle linee di forza del campo elettrico al passaggio tra due
mezzi.
Per il campo magnetico si procede nello stesso modo.
1
La eguaglianza: MdV =
r × ∇ × M può essere dimostrata con un calcolo diretto18.
2
∫
∫
V
V
∇ × B = µ0 ( j + jM ) ⇒ ∇ × ( B − µ0 M ) = µ0 j .
Ponendo:
H=
B
µ0
− M , si ha: ∇ × H = j . Se M = N 0
d 2B
, possiamo sostituire:
3kT
18
A. S: Kompaneyets – Theoretical Physics – Dover p.146/147
1
L’altra eguaglianza m =
r × j dV viene dall’espansione in multipoli del potenziale
2
∫
V
vettore: A =
µ0 1
4π r 3
∫ j (r ⋅ r ' )dV ' = −
V'
88
µ0 1
4π r 3
r × 12
∫ r '× jdV ' =
V'
µ0 1
4π r 3
m×r .
Cap. 3 – I campi
________________________________________________________________________
B
H=
=
µ0
1
µ0 µr
µr =
− M ⇒ B = µ 0 (H + M ) = µ 0 (H + N 0
d2
1
d2
B) ⇒ B
(1 − N 0 µ 0
)=
3kT
3kT
µ0
B=H
1
d2
(1 − N 0 µ 0
)
3kT
µr ≅ 1 + N 0 µ0
e
µ = µ0 µr
(permeabilità
magnetica).
Anche
d2
= 1 + χ m è maggiore di 1. I materiali per cui tutto ciò è vero si
3kT
µ è poco ( 1 / 10 5 ) maggiore dall’unità.
5
Esistono sostanze “diamagnetiche”, per cui µ differisce poco ( 1 / 10 ) dall’unità, ma è
chiamano “paramagnetici” e
inferiore a 1. Evidentemente nelle sostanze diamagnetiche la suscettività è negativa.
Possiamo capire questo osservando che, come effetto della legge di Lenz (vedi Fisica
Generale 2), la molecola diventa sede di una corrente che si oppone alla variazione del
campo magnetico esterno all’atto della sua accensione, cioè acquisisce un momento
magnetico opposto a quello del campo esterno, ovvero una suscettività magnetica χ m
negativa. Dovrebbe risultare chiaro che tale effetto di diamagnetismo si deve avere per
ogni materiale. Tuttavia, se la molecola non ha inizialmente momento magnetico essa
non può che risultare diamagnetica, se, viceversa, essa ha già un momento magnetico
iniziale, il paramagnetismo può risultare l’effetto dominante. Immaginiamo un’orbita
elettronica intorno ad un nucleo. L’equazione del moto è: m
v2
1 Ze 2
= mω 2 r =
. La
r
4πε 0 r 2
1 Ze 2
, dove il doppio segno si riferisce ai
4πε 0 m r 3
due versi di percorrenza dell’orbita. Se applichiamo un campo magnetico lungo un asse
velocità angolare è dunque: ω0 = ±
1
perpendicolare al piano dell’orbita, si ha: mω 2 r =
1
Ze 2
4πε 0 r 2
+ eω rB , che dà come
eB
(frequenza di
2m
Larmor), nell’ipotesi che: ω L << ω0 . In altre parole la velocità angolare aumenta.
Pertanto varia la corrente e il momento magnetico dell’atomo diminuisce
dω
d µ = Sdik = − e
Sk = −eSω L k , con S = area dell’orbita e k il versore nella
2π
direzione del campo magnetico esterno. Se l’atomo non aveva momento magnetico, ne ha
ora acquistato uno nella direzione del campo magnetico, ma con verso opposto a questo.
soluzioni per la nuova velocità angolare: ω = ω0 ± ω L , con ω L =
89
Cap. 3 – I campi
________________________________________________________________________
Il momento della quantità di moto dell’elettrone cambia allora di dL = mr 2ωl che va
moltiplicato per il rapporto giromagnetico e per il numero di elettroni per unità di volume
per darci la suscettività: χ = − N 0 Z µ0
e2r 2
.
4m
Un materiale diamagnetico perfetto sarebbe quello per cui
H=
B
µ0
− M = 0 , cioè quei
materiali per cui il campo H è zero perché la magnetizzazione tiene il campo fuori dal
materiale. Materiali di questo genere sono i superconduttori (effetto Meissner), almeno
finché il campo magnetico esterno resta al di sotto di un valore critico. Essi sono materiali
per cui al di sotto di una temperatura critica, di solito pochi gradi kelvin, la resistività si
annulla completamente, consentendo così la circolazione di una corrente per tempi
infinitamente lunghi senza che ci sia effetto Joule e necessità di una sorgente di
potenziale. La descrizione di questi materiali si ha con le due equazioni di London (Fritz e
Heinz). La prima ci dà la densità di corrente ed è stata data in correlazione con la legge di
Ohm qualche paragrafo addietro. La seconda non può derivarsi dalle equazioni di
Maxwell
∇× j = −
ed
∇× A
µλ
∇× j = −
è:
2
⇒ j =−
∇ × ∇ × H = −∆H = −
H
λ
2
H
λ2
che
.
La
⇒ ∆H =
H
A
µλ 2
λ2
si
può
prima
riscrivere
si
nella
può
forma:
riscrivere:
. Nella direzione perpendicolare alla
−x
H ( x ) = H o e λ , il che mostra
come il campo magnetico vada rapidamente a zero (qualche nm ) dentro il
superficie del superconduttore questa equazione ci dà:
superconduttore.
λ
è chiamata la lunghezza di penetrazione.
Nella teoria precedente, abbiamo usato il fatto che la relazione tra induzione magnetica e
campo magnetico è lineare: B = µH , anche se essa tende a saturare per campi molto
alti (vedere la funzione di Langevin). Per certi materiali, detti “ferromagnetici”, la
saturazione è raggiunta invece rapidamente (almeno al di sotto di una temperatura che
dipende dal materiale, detta temperatura di Curie, al di sopra della quale il materiale è
paramagnetico). La ragione per questo comportamento sta nell’interazione tra dipoli, che
non è stata presa qui in considerazione. Si ha inoltre un effetto di isteresi. Ciò vuol dire
H , B raggiunge velocemente un massimo e poi non cresce più
(saturazione) ovvero riportando il valore di H a zero, B non si annulla più (isteresi),
che, all’aumentare di
90
Cap. 3 – I campi
________________________________________________________________________
come nello sketch sottostante. Usando i valori dei vari parametri dell’acqua e come dipolo
eℏ
magnetico 1 magnetone di Bohr ( µ B =
= 9, 274 ⋅ 10−24 A ⋅ m 2 19) otteniamo:
2 me
χdia = 8,18 ⋅ 10−6 e χ para = 286 ⋅ 10 −6 .
B
H
(solo qualitativo)
Vedremo in Fisica Generale 2 che la formula ∇ × H = j va modificata per tenere conto
del fatto che la divergenza della corrente non è nulla, in caso ci siano dipendenze dal
tempo. Poiché la divergenza del rotore è nulla e quella di j M non può esserlo, si dovrà
aggiungere alla
jM
il termine
∂
P . Ripetendo il ragionamento di otterrà:
∂t
∂D
.
∂t
Possiamo adesso studiare il comportamento del campo magnetico al passaggio tra due
∇×H = j +
mezzi materiali con diverse permeabilità
Maxwell:
µ1
e
µ2 ,
utilizzando le due equazioni di
∇ × H = µ0 j e ∇ • B = 0 .
19
Il magnetone di Bohr è il momento magnetico di un elettrone che orbita intorno al
protone in un atomo d’idrogeno nell’orbita fondamentale.
91
Cap. 3 – I campi
________________________________________________________________________
1
H 1t
B1n
2
H 2t
B 2n
Con la stessa filosofia già usata per il campo elettrico, possiamo dire, assumendo che non
ci siano correnti vere all’intefaccia tra i due mezzi che:
1. la circuitazione dell’intensità magnetica sul percorso di figura, deve essere:
∫ H • d l = 0 . Cioè: H
2.
1t
= H 2t .
Prendiamo un cilindro di altezza infinitesima con le basi parallele all’interfaccia
tra
i
due
dielettrici
e
∫ B • ndS = 0 :
applichiamo
S
0 = Φ ( B) = B1n dS1 − B2 n dS 2 ⇒ B n1 = Bn2 ,
ovvero:
la
componente
normale del vettore induzione magnetica è continua al passaggio tra due mezzi.
Questo evidentemente implica: µ 1 H n1 = µ 2 H n2 , ovvero la componente
normale dell’intensità magnetica è discontinua e il rapporto tra le componenti
normali nei due mezzi è inversamente proporzionale al rapporto tra le due
permeabilità.
µ1 H 1 cosθ 1 = µ 2 H 2 cosθ 2
che,
H
sin
θ
=
H
sin
θ
1
1
2
2
In conclusione, usando entrambe le relazioni, si ha:
dividendo membro a membro, dà:
tgθ 1 µ1
.
=
tgθ 2 µ 2
θ1
1
2
H1
H2
θ2
In conclusione c’è “rifrazione” delle linee di forza del campo magnetico al passaggio tra
due mezzi.
92
Cap. 3 – I campi
________________________________________________________________________
Un importante applicazione di questa formula si ha nel progetto di magneti, per esempio
del magnete di focheggiamento di un acceleratore (vedi il betatrone). Nel passaggio da un
mezzo ferromagnetico all’aria si ha che la permeabilità magnetica cambia drasticamente
andando da valori di migliaia a uno: µ 2 >> µ1 . Applicando la formula appena trovata si
ha:
tgθ 1 µ1
π
=
⇒ tgθ 2 >> tgθ 1 ⇒ θ 2 ≈ . In parole: il campo magnetico o
tgθ 2 µ 2
2
l’intensità magnetica sono sempre ortogonali al mezzo ferromagnetico nella transizione
dal ferro all’aria.
Un applicazione: i condensatori
Abbiamo già calcolato al capitolo 3 le capacità di condensatori sferici, cilindrici e piani.
Con l’aggiunta di un dielettrico omogeneo e lineare, dobbiamo solo cambiare la costante
dielettrica del vuoto nella costante dielettrica. Consideriamo infatti un conduttore sferico
immerso in un dielettrico e vediamo come dobbiamo modificare la legge di Coulomb.
S
R
q
R
r
εr
Applichiamo il teorema di Gauss, utilizzando la superficie S:
∫ D • ndS = q , dove q è la
S
carica nella sfera di raggio R. Prendendo anche S sferica, si ha:
1 q
u r Ritornando al campo elettrico:
4π r 2
D
1 q
E=
=D=
u r Che è la legge di Coulomb: identica a quella nel vuoto
εr
4πε r 2
4πr 2 D = q ⇒ D =
a parte la sostituzione di
ε0
con
ε = ε 0ε r
che, evidentemente riduce il valore del campo
rispetto al vuoto. Ne segue che tutte le formule scritte per le capacità della sfera isolata, il
condensatore sferico, piano e cilindrico, al paragrafo 5.10, subirà una semplice modifica.
93
Cap. 3 – I campi
________________________________________________________________________
1 Q2 1 σ 2S 2 1 σ 2
=
= ε 2 ( Sd ) , da cui si deduce la
2 C
2 S
2 ε
ε
d
1 2 1
densità di energia del campo elettrico: u E = εE = ED . O più in generale:
2
2
1
uE = E • D .
2
Il lavoro sarà infatti: H =
Completiamo l’esercizio della sfera in un dielettrico, calcolando il vettore polarizzazione e
le densità di carica, superficiale e di volume.
ε −1
ε r −1
ε −1 q
D= r
u r ⇒ P ( R) = r
σur .
2
εr
εr
ε r 4πr
P(r ) =
superficiale
di
σ P = P • ( −u r ) =
polarizzazione
polarizzazione
ε −1
ε r −1
σ u r • ( −u r ) = − r σ ,
εr
εr
totale
sulla
superficie
q P = 4πR 2σ P = −4πR 2σ
ε r −1
ε −1
= −q r
εr
εr
calcolare
nuovo
E=
1
4πε 0
di
q + qP
r
2
ur =
La densità di carica
sarà:
cui corrisponde una carica di
della
sfera
pari
a:
e un campo elettrico che possiamo
in
un
altro
modo:
ε −1
q
1
q
(1 − r
)u r =
. Tutto torna.
2
4πε 0 r
εr
4πε 0ε r r 2
1
Vogliamo adesso riflettere su cosa succede alla capacità se connettiamo due (o più)
condensatori “in serie” o “in parallelo”.
Innanzitutto, diciamo che due condensatori sono connessi “in serie” quando sono
connesse solo un’armatura dell’uno con un’armatura dell’altro. Sono invece connessi “in
parallelo” quando entrambe le armature sono connesse tra loro. Simbolicamente:
C1
C2
C1
In parallelo
C2
In serie
Nella connessione in parallelo la tensione di carica viene applicata ai due capi dei
condensatori.
94
Cap. 3 – I campi
________________________________________________________________________
Usando
come simbolo grafico di una batteria,
possiamo disegnare i condensatori con la batteria di carica.
C1
C2
V
Q1 Q2
=
, la carica
C1 C 2
totale sul condensatore costituito di due condensatori sarà: Q = Q1 + Q2 e quindi la
Q Q1 + Q2
=
= C1 + C 2 . Dunque: la capacità totale è uguale alla
capacità sarà: C =
V
V
In parallelo dunque la tensione è la stessa sui due condensatori:
V=
somma delle due capacità.Nella connessione in serie, la tensione totale è quella applicata
ai due capi liberi che è dunque uguale alla somma delle tensioni applicate ai due
condensatori, mentre la carica sulle armature è la stessa:
C1
C2
Q
Q
V
1
1
1
e
V = V1 + V2 =
+
⇒ = =
+
C1 C 2
Q C C1 C 2
−1
−1
−1
V
dunque C = C1 + C 2 , l’inverso della capacità totale
di due condensatori in serie è la somma degli inversi delle capacità dei due condensatori.
Illustriamo adesso questi risultati con un paio di applicazioni.
Consideriamo un condensatore sferico solo parzialmente pieno di dielettrico. Tra le due
armature sferiche di raggi R0 e R2 c’è un dielettrico fino al raggio R1.
R0
R2
R1
95
Cap. 3 – I campi
________________________________________________________________________
L’induzione elettrica è radiale e continua perché non ci sono cariche “vere” tra R0 ed R2.
La energia totale nel condensatore è:
R1
R
2
1 D2
1 D2
2
H=∫
4πr dr + ∫
4πr 2 dr =
2 ε 0ε r
2 ε0
R0
R1
=
1 q2
1
1
1 q2 1
1
( − )+
( − )=
8 πε 0ε r R0 R1
8 πε 0 R0 R1
=
q2 1
1
q2
( +
)=
. Chiaramente avremmo potuto risolvere il problema
2 C1 C 2
2C
considerando il sistema come due condensatori in serie, di cui uno pieno di dielettrico ed
un altro vuoto. Vediamo se otteniamo lo stesso risultato con un condensatore piano.
Σ
s
h
Calcoliamo la differenza di potenziale tra le armature del condensatore:
h
h−s
s
0
0
∆V = ∫ E • d s = 2 ∫ E • d s + Es = ES + E 0 (h − s ) =
=
σ 0Σ
σ Σ
q
q
(h − s ) + 0 s =
+ ⇒
ε 0Σ
ε 0ε r Σ
C0 C
∆V h − s
s
. Questa formula illustra come la capacità totale sia in effetti la
=
+
q
ε 0 Σ ε 0ε r Σ
somma delle capacità in serie di un condensatore pieno di dielettrico e uno vuoto anche
nel caso di condensatori piani.
Lasciamo come esercizio allo studente di dimostrare che nel caso di un condensatore
pieno con due dielettrici; si raggiunge lo stesso risultato: la capacità totale è quella di due
condensatori in serie uno pieno del primo dielettrico, l’altro del secondo.
96
Cap. 3 – I campi
________________________________________________________________________
Σ
s
Risulta cioè:
1
s
h
=
+
C ε 0 ε r1 Σ ε 0 ε r2 Σ
εr
1
h
εr
2
I circuiti
1. Le resistenze
Abbiamo già visto la legge di Ohm al capitolo 3 nella forma: j = σ E . Tuttavia questa
non è la forma più usabile quando si parla di circuiti dove le connessioni vengono
normalmente fatte con fili, cioè con lunghi cilindri di rame o altro conduttore. Prendiamo,
dunque un cilindro di sezione S, lunghezza infinitesima dl e fatto con un materiale di
conducibilità σ ai cui capi applichiamo una differenza di potenziale dV. Avremo:
j • d lS = σS E • d l = σSdV = jSdl = idl ⇒ dV =
integriamo su un filo di lunghezza finita l:
V=ρ
dl
i . Poniamo: ρ = σ −1 e
σS
l
i . Alla quantità: ρ si da il nome di
S
L
si da il nome di resistenza del filo.. Vale dunque la
S
legge di Ohm nella forma: V = Ri , cioè la differenza di potenziale ai capi di una
resistività e alla quantità:
R=ρ
resistenza è uguale al prodotto della corrente per la resistenza, quantità che dipende dal
materiale del filo attraverso la resistività, dalla lunghezza e dalla sezione del filo.
Il simbolo grafico di una resistenza, cioè di un conduttore a resistenza non nulla è:
Proviamo adesso a connettere in serie e parallelo due resistenze, proprio come abbiamo
fatto con i condensatori.
Anche qui la tensione è uguale sulle due resistenze nella configurazione parallela.
Dunque:
V = Ri = i1 R1 = i2 R2 , dove R è
97
Cap. 3 – I campi
________________________________________________________________________
Resistenze in serie
la resistenza totale e i = i1 + i2 è
la corrente totale che passa sul
generatore. In conclusione:
i = i1 + i2 =
R=
V V
V
=
+
=
R R1 R2
R1 R2
.
R1 + R2
resistenze in parallelo
Nella configurazione seriale invece, la tensione applicata alle due resistenze si compone
delle due “cadute” di tensione ai capi delle due resistenze, mentre le correnti che scorrono
nelle resistenze sono uguali. V = V1 + V2 = iR1 + iR2 = iR
Da cui: R = R1 + R2 . Dunque la resistenza totale di due resistenze in serie si ottiene
sommandole, mentre nel caso di due resistenze in parallelo, occorre sommare gli inversi.
Esattamente il contrario dei condensatori.
L’unità di resistenza è lo ohm, simbolo Ω. L’ohm è definito come la resistenza di un
conduttore in cui passa la corrente di 1 A quando ai suoi estremi è applicata la differenza
di potenziale di 1 V.
1.
Le induttanze
Consideriamo un circuito percorso da corrente. Come sappiamo, la corrente genera un
campo magnetico. Evidentemente c’è un flusso del campo magnetico autoconcatenato.
Facciamo vedere che questo flusso autoconcatenato è
proporzionale alla corrente che attraversa il circuito,
attraverso un coefficiente che dipende dalla geometria
del circuito. Infatti:
µ
ds×r
Φ( B) = ∫ B • ndS = 0 ∫ i ∫ 3 • ndS =iL
4π B
r
B
B
Al coefficiente di “autoinduzione” L si dà anche il nome di “induttanza”.
Naturalmente possiamo dire che se c’è una variazione della corrente attraverso il circuito,
allora si avrà una f.e.m. indotta in accordo con la legge di Faraday – Neumann - Lenz:
f .e.m. = − L
di
. E’ chiaro allora che in un circuito con condensatori e resistenze, ogni
dt
variazione della corrente aggiungerà nel circuito una f.e.m variabile nel tempo in aggiunta
alle f.e.m. presenti a causa delle batterie.
Calcoliamo L per un solenoide. Il campo magnetico in un solenoide è: B = µ 0' ni e il
flusso autoconcatenato sarà:
98
Φ ( B) = µ 0 NSni = µ 0 n 2 Sli = µ 0 n 2Vi dove: n è il
Cap. 3 – I campi
________________________________________________________________________
numero di spire N diviso la lunghezza l del solenoide di sezione S. Ne segue che:
L = µ 0 n 2V . Possiamo a questo punto riscrivere la formula del paragrafo 5.10 che dà
l’energia magnetica immagazzinata nel solenoide:
H=
H=
1
µ 0 nNSi 2 nella forma:
2
1 2
Li .
2
Il simbolo grafico di un’induttanza è:
L’unità di induttanza è lo henry.
Lo henry, simbolo H, è definito come l’induttanza di un circuito chiuso nel quale si
sviluppa una f.e.m. di 1 V quando la corrente elettrica varia ad 1 A per secondo.
2.
Le leggi di Kirkhhoff e i circuiti in corrente continua
Oltre la legge di Ohm esistono altre due leggi che sono importanti ai fini di risolvere
circuiti in Corrente Continua (CC). Si tratta di due leggi dovute a Kirkhhoff.
Immaginiamo di avere una rete di resistenze variamente collegate fra loro e con batterie
che fanno passare della corrente. Ciò che vogliamo fare e di calcolare le correnti che
attraversano le varie resistenze, note le tensioni delle batterie e i valori delle resistenze.
Idealmente dovremmo scrivere N equazioni lineari nelle incognite correnti e nelle note
tensioni e resistenze, risolvendo le quali potremmo conoscere le correnti. Le leggi di
Kirkhhoff ci permettono di fare esattamente questo.
Prima di tutto mettiamoci d’accordo di chiamare “nodo” della rete un qualunque punto
dove si connettono almeno tre elementi del circuito. Chiamiamo “ramo” l’insieme degli
elementi in serie tra due nodi e “maglia”, una sequenza di rami che formino un circuito
chiuso. Facciamo un esempio in figura:
nodo B
I rettangoli rappresentano elementi come resistori o maglia
batterie. Evidentemente abbiamo due maglie, una
i2
i3
costituita da quattro e una costituita da tre elementi ed
entrambe consistenti di due rami..
Ebbene, la prima legge di Kirkhhoff stabilisce che la
i1
somma delle correnti entranti o uscenti da un nodo deve essere
uguale a zero. In effetti si riafferma la conservazione della carica
e l’impossibilità di accumulare carica in un punto del circuito. Dunque la
carica che fluisce in un nodo non potendo accumularsi o scomparire deve necessariamente
fluire fuori dal nodo. Se diamo un segno positivo alle correnti entranti nel nodo e negativo
a quelle uscenti, possiamo scrivere:
∑i
k
= 0.
k
Per esempio nel nodo della precedente figura:
99
i1 − i2 − i3 = 0 .
nodo A
Cap. 3 – I campi
________________________________________________________________________
La seconda legge di Kirkhhoff tratta invece le maglie. Indichiamo con una lettera
maiuscola un nodo e applichiamo la legge di Ohm ai rami di un nodo, procedendo, come
scelto, in senso orario. Potremo scrivere equazioni del tipo:
VA + E1 − i1 R1 = VB
Evidentemente, con questa equazione diciamo che il potenziale nell’estremo B (nodo) del
ramo è dato dalla somma del potenziale in A aggiungendo la f.e.m. della batteria e
sottraendo la caduta di tensione sulla resistenza dello stesso ramo.
Per essere perfettamente chiari diciamo: la batteria può non esistere e in questo caso sarà
E1 = 0 ; è possibile che nel ramo ci siano più resistenze in serie o parallelo: con R1
indichiamo la resistenza totale del ramo e con i1 la corrente nel ramo. Scriviamo allora
queste equazioni per una serie di rami che costituiscano una maglia, per la quale dovrà
necessariamente essere vero che il nodo A è il primo e l’ultimo nodo della maglia.
VA + E1 − i1 R1 = VB
VB + E 2 − i2 R2 = VC
VC + E3 − i3 R3 = VD
...
VP + E n − in Rn = V A
Notiamo che il potenziale di ciascun nodo appare sempre una volta a sinistra e nella
successiva relazione a destra, tranne A che riappare comunque nella relazione finale a
destra. Se sommiamo tutte queste relazioni, tutti i potenziali, apparendo sia a sinistra che
a destra, si cancellano e si ha:
∑E
k
= ∑ ik Rk
k
Questa è la seconda legge di Kirkhhoff che dunque asserisce che: la somma delle f.e.m. in
una maglia è uguale alla somma delle cadute di potenziale sui rami della maglia.
Consideriamo il circuito in figura e scriviamo le regole delle maglie esplicitamente:
1. Il verso convenzionale della corrente, generalmente accettato è dal potenziale più
positivo verso quello meno positivo, come se i portatori di carica fossero positivi e
non negativi, anche se realmente la conduzione nei metalli è affidata agli elettroni.
2. Tuttavia in una maglia possiamo dare alle correnti il verso convenzionale che ci pare;
nell’esempio in figura abbiamo scelto il verso orario, ma era egualmente legittimo
scegliere quello antiorario. Assegnato un verso arbitrario delle correnti, possiamo
scrivere le equazioni delle maglie attenendoci a due regole:
3. Se la corrente col verso scelto arbitrariamente come in 2, attraversa internamente una
batteria dal verso positivo a quello negativo, il potenziale viene scritto col segno
negativo.
100
Cap. 3 – I campi
________________________________________________________________________
4.
Se la corrente attraversa una resistenza in senso coerente con il verso convenzionale
delle correnti, allora occorre scrivere la “caduta di tensione” iR col segno meno
davanti: − iR .
Facciamo un esempio:
R1
R4
-
-
V1
R2
+
R3
V2
R5
+
Si tratta di un circuito con due maglie e due nodi: dunque possiamo in linea di massima
scrivere 4 equazioni. Abbiamo una corrente i1 che attraversa il ramo costituito da
V1 , R1 , R3 , una corrente i2 che attraversa il ramo costituito dalla resistenza R2 e, infine,
la corrente i3 attraverso il ramo costituito da V2 , R4 , R5 . Dunque tre incognite in totale:
una delle quattro equazione risulterà linearmente dipendente dalle altre tre.
Scriviamo adesso , usando le regole esposte, le equazioni delle maglie. Per la maglia di
sinistra:
− V1 + i1 ( R1 + R3 ) + i2 R2 = 0
che
possiamo
riscrivere
anche
nella
forma:
riscrivere
nella
forma.
V1 = i1 ( R1 + R3 ) + i2 R2 .
Passiamo all’altra maglia:
V2 − i3 ( R4 + R5 ) − i2 R2 = 0
che
possiamo
anche
V2 = i3 ( R4 + R5 ) + i2 R2 .
L’equazione al nodo in alto è:
i2 = i1 + i3 , infatti la i2 entra nel nodo, mentre le altre
due ne escono. L’equazione al nodo in basso è identica e dunque la scartiamo. In
conclusione dobbiamo risolvere il sistema di tre equazioni:
V1 = i1 ( R1 + R3 ) + i 2 R2
V2 = i3 ( R4 + R5 ) + i2 R2
i = i + i
2 1 3
Utilizzando la terza per eliminare
sistema nella forma:
101
i2 tra le prime due e riordinando, possiamo riscrivere il
Cap. 3 – I campi
________________________________________________________________________
V1 = i1 ( R1 + R2 + R3 ) + i3 R2
V2 = i1 R2 + i3 ( R2 + R4 + R5 )
i = i + i
2 1 3
Risolvendo con la regola di Kramer, abbiamo:
V1 ( R2 + R4 + R5 ) − V2 R2
( R2 + R4 + R5 )( R1 + R2 + R3 ) − R22
V2 ( R1 + R2 + R3 ) − V1 R2
i3 =
( R2 + R4 + R5 )( R1 + R2 + R3 ) − R22
i1 =
e, sostituendo nella terza:
i2 =
V1 ( R4 + R5 ) + V2 ( R1 + R3 )
( R2 + R4 + R5 )( R2 + R4 + R5 ) − R 2
Se, per esempio, i valori delle resistenze e delle tensioni fossero:
R1 = 5Ω
R = 2Ω
2
V1 = 10V
R3 = 4Ω e
R = 7Ω V2 = 8V
4
R5 = 8Ω
i1 = .841 A
Troveremmo: i2 = 1, 21 A
i = 0.372 A
3
Dato un circuito con m maglie e n nodi, possiamo in genere scrivere un numero di
equazioni lineari maggiore del numero di correnti incognite
ik : dunque non tutte le
equazioni saranno linearmente indipendenti. Tuttavia, scelto un insieme di equazioni
indipendenti pari al numero delle correnti, si potrà sempre risolvere il circuito,
eventualmente con l’ausilio di un calcolatore se il sistema di equazioni consiste di un
numero equazioni molto grande.
3.
I circuiti RC, RCL e i circuiti in corrente alternata
Cominciamo con l’esaminare il circuito RC. Alla chiusura
102
Cap. 3 – I campi
________________________________________________________________________
dell’interruttore, la corrente comincia a passare nel
circuito. La carica raggiunge il condensatore. Come
abbiamo già visto al paragrafo 5.3, l’equazione del
q
= V . Derivando rispetto al tempo
C
di
e moltiplicando per C. Si ha: RC
+ i = 0 che
dt
circuito è:
Ri +
R
V
possiamo integrare per separazione delle variabili:
Poniamo:
τ = RC
e abbiamo:
dt
τ
=−
di
e integrando:
i
C
t
V −
i (t ) = e τ , integrando ancora otteniamo la carica in funzione del tempo:
R
−
t
q (t ) = CV (1 − e τ ) . In altre parole la corrente parte dal massimo dato dalla legge di
Ohm, poi con lo stabilirsi di un controcampo dovuto al caricarsi della capacità, la corrente
cala e si azzera in modo asintotico. La carica sul condensatore tende invece in modo
asintotico al valore di carica massima CV.
Si può naturalmente scaricare, piuttosto che caricare un condensatore attraverso una
resistenza col circuito in figura.
Caricato il condensatore al potenziale V, chiudendo l’interruttore,
la corrente passa per il circuito. La legge di Ohm ci dà:
Ri =
q(t )
di
. Derivando si ha: τ
= −i . Il
C
dt
R
segno meno appare perché stavolta la derivata della carica
è negativa (la carica diminuisce), mentre la corrente è positiva.
t
La soluzione è quella di prima: i (t ) =
V −τ
e e integrando si
R
Ottiene l’andamento della carica sul condensatore che deve arrivare questa
−
t
volta al valore asintotico di zero: q (t ) = CVe τ , scegliendo come valore
iniziale della carica la carica inizialmente presente sul condensatore carico.
C
Passiamo adesso al circuito RCL, che come implicito nel nome ha tre elementi, una
resistenza, una capacità e un’induttanza. La capacità e carica, quando chiudiamo
l’interruttore. L’equazione del circuito:
di
q
+ Ri + = V . Derivando rispetto al tempo:
dt
C
2
d i
di i
L 2 + R + = 0 . Che ha come soluzioni:
dt C
dt
L
R
103
L
Cap. 3 – I campi
________________________________________________________________________
−
R
2L
−
R2
−
R2
1
t
LC
1
−
t
4 L2 LC
i (t ) = e ( I 1e
+ I 2e
).
Come si vede, la soluzione ha comunque un esponenziale decrescente che in ogni caso
porterà la corrente in modo asintotico a zero. Il calo della corrente è da attribuire
evidentemente alla presenza nel circuito di una resistenza. Se la resistenza fosse nulla,
allora non solo scomparirebbe l’esponenziale davanti la parentesi, ma gli argomenti degli
2
4L
esponenziali nella parentesi sarebbero immaginari:
jω 0 = j
1
e le soluzioni
LC
sarebbero oscillanti:
i (t ) = ( I 1e
−j
1
t
LC
+ I 2e
j
1
t
LC
) = I 1 (sin ω 0 t + cos ω 0 t ) + I 2 (sin ω 0 t − cos ω 0 t ) = i1 sin ω 0 t + i2 cos ω 0 t
j l’unità immaginaria per evitare confusione con il simbolo
della corrente; dunque: j = −1 . Ci si può chiedere perché. Come sappiamo dalla legge
di Ohm, se ai capi di una resistenza c’è una tensione V allora V = Ri , Possiamo a questo
. Abbiamo qui indicato con
2
punto calcolare il lavoro fatto dal campo per fare passare la corrente nella resistenza.
Nell’unità di tempo questo è dL = Vdq = Vidt e integrando su un tempo t, si ha:
L =V
i2
, questa energia è in realtà dissipata sotto forma di calore (la resistenza si
2
scalda), proprio come accadrebbe con un attrito meccanico. L’effetto è noto come effetto
Joule. Evidentemente all’inizio abbiamo fatto un lavoro per caricare il condensatore,
Chiudendo l’interruttore abbiamo consentito il passaggio di corrente e una parte
dell’energia spesa inizialmente per caricare il condensatore viene dissipata sulla
resistenza ad ogni oscillazione fino a che l’intera energia immagazzinata nel sistema
all’inizio sia completamente dissipata. Il sistema può oscillare anche in presenza di una
resistenza non nulla, naturalmente purché l’argomento della radice quadrata sia negativo.
In questo caso abbiamo le oscillazioni smorzate di cui si diceva. Se l’argomento della
radice è positivo o nullo, allora non ci sono oscillazioni, ma solo una diminuzione
esponenziale della corrente.
104
Cap. 3 – I campi
________________________________________________________________________
1,5
R=100 Ω
L=1 mH
C=10 pF
ω0>R/2L
corrente (A)
1,0
0,5
0,0
-0,5
-1,0
0,0
-5
2,0x10
-5
4,0x10
-5
6,0x10
-5
8,0x10
-4
1,0x10
tempo (s)
Oscillazioni smorzate sono presentate nel grafico per i valori riportati e per ampiezze
della corrente: i1 = i2 = 1A .
105
Cap. 3 – I campi
________________________________________________________________________
1,5
5
R=10 Ω
L=1 mH
C=10 pF
ω0<R/2L
corrente (A)
1,0
0,5
0,0
-0,5
-1,0
0,0
-7
2,0x10
-7
4,0x10
-7
6,0x10
-7
8,0x10
-6
1,0x10
tempo (s)
Aumentando il valore della resistenza, troviamo solo una diminuzione esponenziale della
corrente.
In effetti possiamo fare una analogia del circuito RCL con l’oscillatore meccanico, che è
d 2x
dx
+β
+ kx = 0 , dove il termine kx viene dalla
2
dt
dt
dx
forza di richiamo F = −kx , il termine β
è un termine dissipativo proporzionale alla
dt
retto da una formula del tipo: m
velocità. Anche in questo caso, abbiamo discusso il trasferimento dell’energia dal termine
potenziale a quello cinetico e viceversa. Anche in questo caso un fenomeno dissipativo
(attrito) trasforma l’energia in calore e il moto si arresta.
106
Cap. 3 – I campi
________________________________________________________________________
Possiamo complicare un po’ le cose, aggiungendo nel nostro circuito una sorgente di
potenziale che, anziché essere continua, sia funzione del tempo secondo la legge:
V (t ) = V0 cos(ωt + φ ) . L’equazione del circuito diventa così:
d 2i
di i
+ R + = −ωV0 sin(ωt + φ ) proviamo a trovare una soluzione oscillante
2
dt C
dt
e jω t + e − jω t
per la corrente: i (t ) = i 0 cos ωt = i 0
. Deriviamo e sostituiamo
2
i
− Li0ω 2 cos ωt − Ri0ω sin ωt + 0 cos ωt = −ωV0 sin ωt Passiamo alle funzioni
C
i
2 jωt
+ jRi0ωe jωt + 0 e jωt = jωV0 e j (ω +φ )t
complesse: − Li0ω e
C
i
− Li0ω 2 e − jωt + jRi0ωe − jωt + 0 e − jωt = jωV0 e − j (ω +φ )t
C
L
R
V(t)
L
Come si vede le equazioni nei due esponenziali sono identiche, a parte, ben inteso, il
segno dell’esponenziale. Dunque basta considerare una sola di queste equazioni
eliminando l’esponenziale che compare dappertutto. Otteniamo così una identità tra due
numeri complessi che dovranno avere così lo stesso modulo e la stessa fase. Non c’è
dipendenza dal tempo.
− CLi 0ω 2 + jC ωRi 0 + i 0 = jC ωV0 e jφ
107
Cap. 3 – I campi
________________________________________________________________________
i0 ( −CL ω 2 + jC ωR + 1) = jC ωV0 e jφ i0 ( R + j (ωL −
1
)) = V0 e jφ Indichiamo
ωC
1
) , perché l’eguaglianza sia
ωC
1 2 V0
2
) =
Z = R + (ωL −
i0
ωC
soddisfatta deve essere:
.
1
ωL −
ωC
φ = atg
R
con Z il numero complesso:
Z = R + j (ωL −
La prima eguaglianza ci dice immediatamente che Z è una specie di generalizzazione ai
circuiti con un potenziale sinusoidale (ovvero in Corrente Alternata o CA) della
resistenza, cui in effetti si riduce quando ω = 0 , cioè in CC. Z è chiamata “impedenza”.
La seconda ci dice che le correnti e i potenziali, per quanto entrambi sinusoidali, sono
sfasati se nel circuito oltre alla resistenza, abbiamo una capacità o un’induttanza.
A parte questo punto che riprenderemo fra breve, notiamo che l’ampiezza della corrente
è: i0
V0
=
che avrà un massimo quando:
R 2 + (ωL −
quando:
ω=
1
LC
1 2
)
ωC
ωL −
1
= 0 , cioè
ωC
= ω0
Facciamo un grafico dell’andamento dell’ampiezza della corrente in funzione di
V0 = 1V .
108
ω
per
Cap. 3 – I campi
________________________________________________________________________
0,014
R=100 Ω
L=1 mH
C=10 pF
0,012
i(ω) (A)
0,010
7
ω0=10 rad/s
0,008
0,006
0,004
0,002
0,000
6
7,00x10
6
8,00x10
6
9,00x10
7
1,00x10
7
1,10x10
7
1,20x10
7
1,30x10
pulsazione (rad/s)
Come si vede dal grafico, l’ampiezza decresce rapidamente allontanandosi dalla
frequenza angolare di “risonanza” ω 0 .
Questo è un tipico fenomeno di risonanza. Il termine “risonanza” viene evidentemente
dall’acustica dove fenomeni simili sono stati ben noti per lungo tempo ai liutai. In
sostanza il fenomeno consiste in un forte aumento dell’ampiezza di oscillazione quando la
forza che fa oscillare il sistema (meccanico o elettronico) pulsa con una frequenza
particolare tipica del sistema stesso.
Passiamo ad interpretare adesso la impedenza come il termine di proporzionalità tra
tensione e corrente. Abbiamo calcolato l’impedenza per un sistema RCL, ma possiamo
chiederci quale è l’impedenza se avessimo solo R o C o L, ovvero se avessimo una
qualsiasi combinazione di due di questi elementi. E’ anche evidente che possiamo
connettere due di questi elementi in serie o in parallelo.
Per rispondere a queste domande non rimane che calcolare l’impedenza nel caso
dell’elemento singolo, doppio, in serie o parallelo. Ci limitiamo a dimostrare il caso
generale con qualche esempio particolare, lasciando allo studioso lettore la dimostrazione
degli altri casi.
109
Cap. 3 – I campi
________________________________________________________________________
Utilizziamo anche lo stesso metodo delle funzioni complesse, essendo chiaro che ciò che
vale per una funzione complessa vale per seno e coseno.
Consideriamo un circuito RC: quale è la sua impedenza?
R
V(t)
di i dV
+ =
. Prendiamo per V = V (t ) , la funzione:
dt C
dt
V (t ) = V0 e j (ωt +φ ) e cerchiamo delle soluzioni nella forma: i (t ) = i 0 e jωt . Sostituiamo
1
jωt
ed eliminiamo il fattore e : ( jωR + )i0 = jωV0 . Dividiamo per il fattore
C
1
1
jω . ( R +
. Da questa
)i0 = V0 e troviamo che l’impedenza è: Z = R +
j ωC
jω C
L’equazione del circuito è:
R
equazione deduco che l’impedenza di una resistenza è la resistenza stessa. Dunque
l’impedenza di un condensatore è Z =
1
e le impedenze in serie si sommano.
j ωC
Dall’impedenza del circuito RCL, deduco che l’impedenza di una induttanza è:
Z = jωL .
Proviamo a mettere due impedenze in parallelo e vediamo quale è l’impedenza finale. Per
esempio una capacità e un’induttanza.
V V
V
e quindi è ovvio che Si sommano gli inversi delle
=
+
Z Z1 Z 2
Z1 Z 2
impedenze, come per le resistenze in parallelo: Z =
=
Z1 + Z 2
1
L
j ωL
che è un’impedenza puramente immaginaria. In
=
=
1
C
1 − ω 2 LC
j ωl +
j ωC
Deve essere: I =
C
L
110
V(t)
Cap. 3 – I campi
________________________________________________________________________
conclusione: le regole per le impedenze sono uguali a quelle delle resistenze.
L’impedenza di un resistore è reale e non comporta sfasamenti tra tensione e corrente. Le
impedenze immaginarie delle induttanze e delle capacità comportano uno sfasamento
rispettivamente di
+
π
2
e
−
π
2
.
Un’interessante applicazione delle impedenze complesse si ha nelle linee di trasmissione.
Discutiamo l’esempio di un cavo coassiale.
Un cavo coassiale è una linea di trasmissione costituita da due conduttori cilindrici
coassiali.
La tensione viene applicata tra i due conduttori ad
Conduttore esterno
un estremo del cavo e l’impedenza di “carico”
viene anch’essa connessa i due conduttori
all’altra estremità del cavo.
Una maniera di schematizzare questa linea
conduttore interno
Di trasmissione è di pensarla come una
Sequenza di capacità in parallelo e di
Induttanze seriali. Noi ammettiamo che la
resistenza dei conduttori sia nulla per semplicità
dielettrico
di trattazione.
Indichiamo con C la capacità e con L l’induttanza
per unità di per unità di lunghezza del cavo.
Possiamo scrivere le equazioni del cavo:
dV = jωLIdx
dI = jωCVdx
ZL
x
La prima dà la caduta di tensione su un tratto
Infinitesimo di cavo dovuta alla induttanza seriale.
La seconda dà la variazione della corrente su una lunghezza infinitesima dovuta alla
capacità verso il cavo esterno di massa. Deriviamole entrambe e separiamo corrente e
tensione.
d 2V
d 2V
dI
2
=
j
L
ω
2
2 = −ω LCV
dx
dx
dx
sostituendo:
queste equazioni hanno come
2
2
d I = jωC dV
d I = −ω 2 LCI
dx 2
dx 2
dx
soluzioni:
111
Cap. 3 – I campi
________________________________________________________________________
V ( x) = V1e jω LC x + V2 e − jω LC x
. Come si vede ci sono due onde che si propagano
I ( x) = I 1e jω LC x + I 2 e − jω LC x
1
. Deriviamo le soluzioni
lungo il cavo coassiale in versi opposti con velocità: v =
LC
e sostituiamo nelle equazioni originali per trovare una correlazione tra le ampiezze di
corrente e le ampiezze di tensione.
dV = Jω LC (V1e jω
LC x
− V2 e − jω
LC x
) = jωL( I 1e jω
LC x
− I 2 e − jω
LC x
),
da
cui deduciamo:
V1
V
= 1
I1 =
L Z0
L
C
con Z 0 =
C
I = − V2 = V2
2
L Z0
C
ZL che poniamo a coordinata x=0.
V
V
Dovrà essere: V (0) = I (0) Z L = V1 + V2 = Z L ( I 1 + I 2 ) = Z L ( 1 − 2 ) . Da
Z0 Z0
Ad un estremo del cavo c’è l’impedenza di carico
quest’ultima equazione possiamo ricavare il rapporto tra le ampiezze delle due onde:
V2 Z L − Z 0
. Come si vede se l’impedenza di carico è uguale a Z0 allora non c’è
=
V1 Z L + Z 0
onda riflessa. La quantità rappresenta una caratteristica del cavo e viene chiamata
impedenza caratteristica. Per evitare riflessioni un cavo va sempre “terminato”, cioè
chiuso su una impedenza di carico identica all’impedenza caratteristica.
4.
Misure elettriche
Vogliamo fare una breve rassegna di alcuni metodi importanti di misura di quantità
elettriche circuitali: tensioni, correnti, resistenze, capacità ed induttanze.
Il primo strumento, che è quello basilare, si chiama amperometro. Si tratta di un semplice
dispositivo costituito da una bobina, piena di materiale ferromagnetico, che può ruotare
nel campo magnetico di una magnete permanente quando viene percorsa da corrente. Una
molla a spirale, simile a quella dei bilancieri degli orologi, riporta l’equipaggio mobile
112
Cap. 3 – I campi
________________________________________________________________________
(cioè, bobina e ago) alla posizione di riposo quando non c’è più corrente. La deviazione
dell’ago, misurata su una scala graduata è calibrata direttamente in ampere.
Quando la corrente attraversa
la bobina, la bobina è
soggetta ad un momento
M = m× B ,
m = µiS
è
il
meccanico:
N
S
θ
N
S
dove
momento magnetico, con la
direzione dell’ago, della
bobina di area S, attraversata
dalla corrente incognita i .
C’è da notare che, il campo
magnetico, a causa del
nucleo di ferro all’interno
della bobina, è tale da
generare lo stesso momento
meccanico sulla bobina,
indipendentemente dal suo
angolo. Tuttavia la molla a
spirale di richiamo genera un
suo momento, M = Kθ ,
che dipende dall’angolo:
quando si ha eguaglianza tra
i due momenti meccanici, la
bobina si arresta ad un
angolo
tale
che:
Kθ = µSBi ⇒ i =
Kθ
,
µSB
da cui si vede che la corrente
e l’angolo di deviazione sono
proporzionali:
ciò
che
consente di avere una scala
lineare di correnti.
Per utilizzare lo strumento
descritto, occorre metterlo in
serie nel circuito. Tuttavia
c’è da notare che così
facendo si inserisce nel
circuito di cui si vuol
misurare la corrente un
resistenza addizionale: quella
113
Cap. 3 – I campi
________________________________________________________________________
della bobina mobile. Ciò
causerà una variazione della
corrente
che
si
vuol
misurare.
Per
rendere
minima questa modifica del
circuito, si mette in parallelo
alla bobina una resistenza
(“shunt”) molto
piccola. La resistenza totale R che si sarà così inserita nel circuito sarà il parallelo tra la
resistenza dello shunt
Rs e quella della bobina Rb : R =
RS Rb
≈ RS . Dunque si
R S + Rb
può pensare di rendere il disturbo arbitrariamente piccolo, scegliendo lo shunt con una
resistenza arbitrariamente piccola. Non è proprio così, perché scegliendo piccola si riduce
anche la corrente che passa attraverso la bobina: se questa si riduce troppo non ci sarà una
deviazione leggibile dell’ago. Dunque un disturbo rimarrà e si potrà rendere piccolo,
perfezionando gradualmente lo strumento. In realtà, l’uso dell’elettronica rende oggi
possibile costruire strumenti con resistenza seriale molto piccola, peraltro non più
analogici, ma digitali.
L’amperometro ha anche un uso come voltmetro: basta infatti mettere lo strumento in
parallelo ai due punti tra cui si vuole misurare la differenza di potenziale. In questo caso
una parte della corrente viene deviata nello strumento: quanta esattamente dipende dalla
resistenza della bobina e dalla differenza di potenziale: dunque nota la corrente attraverso
la bobina, misurata dalla sua deflessione e la resistenza della bobina è nota la differenza
di potenziale. Naturalmente così abbiamo variato la resistenza tra i due punti e abbiamo di
nuovo modificato il funzionamento del circuito. Occorre in questo caso aggiungere una
resistenza seriale alla bobina in modo da renderla il più grande possibile, senza peraltro
ridurre troppo la corrente attraverso la bobina oltre i limiti della sua sensibilità.
Con l’aiuto di una batteria, l’amperometro può essere usato anche come ohmmetro. Basta
mettere l’amperometro in serie con batteria e resistenza in serie e la corrente che passa
attraverso l’amperometro è una misura della resistenza incognita, nota la f.e.m. della
batteria.
In sintesi, l’amperometro può essere usato in tre modi, per misure di corrente, di tensione
e di resistenze.
Per misure di corrente
Per misure di tensione
Per misure di resistenza
R
R
Rx
114
Cap. 3 – I campi
________________________________________________________________________
In pratica, la combinazione di un amperometro, una batteria, resistenze e deviatori per
poter effettuare tutt’e tre le misure viene venduto a basso costo sotto il nome di “tester”.
Per i condensatori vengono pure venduti strumenti a basso costo che misurano la costante
di tempo di un circuito RCX, di cui la R è nota e CX è la capacità incognita, ma la
maniera migliore di misurare impedenze complesse tra cui le capacità è il ponte, che è
uno strumento però di un certo costo.
Cominciamo dal ponte di Wheatstone in CC. Consiste in una sorgente di f.e.m., tre note
resistenze ben note, e un amperometro ad alta sensibilità , qui usato come “strumento di
zero”. L’amperometro qui viene usato non per misurare una corrente, ma per dirci quando
C
essa è nulla.
La resistenza attraversata da una freccia è una resistenza variabile:
una resistenza il cui valore può essere cambiato dallo sperimentatore,
ma il cui valore rimane noto.
Variando R, si può raggiungere la condizione di bilanciamento del ponte
in cui V A = VD . Conseguentemente nessuna corrente scorre attraverso
l’amperometro.
Possiamo allora scrivere le quattro equazioni:
V A − VC
V − V
D
C
VB − V A
VB − VD
R3
D
A
V
RX
R2
B
= i1 R1
= i2 R3
= i1 R2
= i2 R X
Dividendo le prime due e le seconde due equazioni tra loro, si ottiene:
ovvero:
R1
R X = R2
R3 i1 R X
= =
R1 i2
R2
R3
. Dunque possiamo paragonare direttamente la resistenza
R1
incognita con resistenze campioni.
Lo stesso ponte può essere realizzato in CC, sostituendo il generatore di f.e.m. in CC con
un generatore sinusoidale e rimpiazzando le resistenze con impedenze, di cui una
115
Cap. 3 – I campi
________________________________________________________________________
variabile. L’impedenza incognita verrà di nuovo data dalla relazione precedente,
sostituendo le resistenze con le imp
Appendice 1.
1.
L’ampere (A) era l’intensità di una corrente che in una soluzione di
nitrato d’argento deposita 1,118g di Ag al secondo. Ora è definito
come la corrente che, fatta passare in due fili rettilinei paralleli a distanza
di un metro l’un dall’altro, produce una forza tra i due fili pari a
2 ⋅ 10 −7 N per metro di lunghezza.
2.
Il coulomb (C) è la quantità di carica convogliata dà 1 ampere al
secondo.
Appendice 2. La misura di G
Newton aveva assunto che la Luna girasse intorno alla Terra con un’accelerazione
data da ω 2 RTL sotto l’azione dell’attrazione tra la massa della Luna e quella della
Terra. Dunque: ω 2 RTL = G
MT
2
RTL
⇒ G = ω2
3
RTL
3
o GMT = ω 2 RTL
. A questo
MT
punto, possiamo dire che Newton conosce il prodotto GMT , dal periodo di
rivoluzione della Luna intorno alla Terra e dalla distanza della Luna dalla Terra:
T = 27, 3d = 2, 36 ⋅ 106 s ⇒ ω = 2, 66 ⋅ 10−6 rad / s e RTL = 3,84 ⋅ 108 m , da cui:
GMT = (2,66 ⋅ 10−6 s )2 (3,84 ⋅ 108 )3 = 4,0 ⋅ 1014 m 3 / s 2 . Se dividiamo per il valore
accettato della massa terrestre, troviamo:
G = 4,0 ⋅ 1014 / 5,98 ⋅ 1024 kg = 6,69 ⋅ 10−11 m 3 / ( s 2 ⋅ kg ) . Il valore oggi accettato
è: G = 6,74 ⋅ 10−11 m 3 / ( s 2 ⋅ kg ) .
Nel 1774, il quinto astronomo reale Reverendo Nevil Maskelyne (1732-1811),
propose ed eseguì una misura volta ad ottenere il valore di G, usando un pendolo,
in prossimità di una montagna (lo Schiehallion, in Scozia). Il risultato della sua
misura, riportato in termini di densità della Terra, fu di 4,5g/cm3, invece di
5,52g/cm3 che è il valore oggi accettato. Cavendish riportò il valore di 5,48g/cm
(vedere oltre). Il metodo è schematizzato nella figura. Lungo il pendolo, attirato
verso il centro della Terra, ma anche dalla massa della montagna, viene allineato
un telescopio che punta ad una stella nota. Passando dall’altro lato della montagna,
si punta di nuovo il telescopio verso la stessa stella e si prende l’angolo tra il
pendolo e l’asse del telescopio: questo è l’angolo tra le direzioni del pendolo ai
due lati della montagna.
L’angolo al centro della Terra è pari alla
distanza tra le due postazioni diviso il
raggio terrestre. In questo modo si
116
Cap. 3 – I campi
________________________________________________________________________
conosce l’angolo del pendolo relativo alla
verticale, la cui tangente dipende dal
rapporto tra attrazione terrestre e della
montagna. Stimata la massa della
montagna, se ne deduce la massa terrestre,
ovvero la sua densità (dalla conoscenza
del raggio terrestre). G può essere
calcolato dalla conoscenza della massa
M
terrestre e di g = G 2T . Per un angolo di
RT
deviazione dalla verticale di θ=2,810-5rad,
calcolare la densità media terrestre, se la
montagna è un cono di densità
ρ = 2,5 g / cm 3 , alto 1797m.
βν
s
β
θ
RT
α
α=s/RT
Dalla figura si deduce che θ = β / 2 − α / 2 , dove β è misurato dalla deviazione del
telescopio tra le due postazioni e α è l’angolo che sottende la distanza s tra le
postazioni visto dal centro della Terra. Noto quest’angolo e considerato che il
rapporto tra la forza orizzontale d’attrazione verso la montagna e la massa terrestre
è pari alla tangente di θ, abbiamo:
GM m GM T
R2 M
tgθ =
/ 2 = T2 m . Conoscendo RT e la distanza r del pendolo dalla
2
r
RT
r MT
montagna, possiamo calcolare la massa MT della Terra: M T = M m
RT2
. La
r 2 tgθ
1
massa della montagna può essere approssimata dalla formula: M m = πr 2 hρ . Si
3
ottiene:
R2
R2
1
1
M T = πr 2 hρ 2 T = πhρ T =
3
tgθ
r tgθ 3
.
6 2
1
3
3 (6,4 ⋅ 10 )
24
= π 1797m ⋅ 2,5 ⋅10 kg / m
= 6,88 ⋅10 kg
3
2,8 ⋅10 −5 rad
Il valore attualmente accettato per la massa terrestre è di 5,8.1024kg.
La misura storicamente più importante fu eseguita da Cavendish con la bilancia di
torsione costruita inizialmente da J. Michell. La bilancia consiste, nelle sue parti
essenziali, in un’asta orizzontale (di lunghezza 2 l ≈ 1, 8 m ) di legno dolce, appeso
ad un filo (filo di torsione) di rame argentato, lungo 1m . Due sfere di Pb (densità:
11g / cm 3 ) del diametro di 10cm sono sospese alle estremità dell’asta. Due sfere,
anche di Pb e del diametro di 20cm , sono affacciate da entrambi i lati in
posizione fissa. L’attrazione tra sfere sospese e sfere fisse torce il filo (vedi anche
il disegno della bilancia di torsione di Coulomb al cap.3 delle dispense).
117
Cap. 3 – I campi
________________________________________________________________________
L’uso del ferro fu evitato per non avere effetti dovuti ad un’eventuale
magnetizzazione. Tutto l’apparato è chiuso in una stanza sigillata, in modo da
evitare correnti d’aria e differenze di temperatura che potrebbero esse stesse creare
delle correnti d’aria. Lo strumento viene guardato con dei telescopi dall’esterno,
usando la luce di varie lampade (a candela!).
Il braccio orizzontale oscilla prima di fermarsi in una posizione finale. Il periodo
di oscillazione era di 7’ con un filo e di quindici con un altro. La misura procede
determinando dinamicamente la posizione di equilibrio delle sfere mobili, cioè
prendendo la posizione centrale tra due estremi dell’oscillazione e misurando
contemporaneamente il periodo di oscillazione.
Il periodo di oscillazione è dato da (vedi oltre): T = 2π
2ml 2
, con
4GMm
k+
lθ03
I = 2ml 2 , m la massa delle sfere sospese e k la costante elastica del filo che
misura il momento applicato all’asta attraverso la deviazione angolare a partire
dal valore dell’angolo θ1 a cui il filo non è torto.
Si ha dunque:
k (θ1 − θ 0 ) = 2
GMm
d2
l cos
θ0
2
in cui d = 2l sin
sfere grandi all’equilibrio e cos
Eliminiamo k = 4π 2
(4π 2
ml
T
2
2
−
4
lθ 03
ml 2
T
2
−
θ0
4
lθ 03
2
θ0
è la distanza tra sfere piccole e
2
proietta la forza sulla normale all’asta sospesa.
GMm fra queste due equazioni e otteniamo:
GMm )(θ1 − θ 0 ) = 2
GMm
d
2
l cos
θ0
2
⇒G =
4π 2
4
lθ 03
M (θ1 − θ 0 ) +
l2
T2
M
2l sin 2
Sostituendo: T = 7' ; θ = 5, 4 ⋅ 10 −2 rad , l = 90cm e la massa della sfera di
piombo, si ottiene un valore prossimo a quello accettato oggi.
118
θ0
2
cos
θ0
2
Cap. 3 – I campi
________________________________________________________________________
Bilancia di torsione di Cavendish
Un metodo simile fu usato da Heyl (1930). In questo esperimento le masse piccole
erano di 50g , le grandi di 65kg a distanze relative di 48cm , il filo era di
tungsteno da 25µ di diametro, la lunghezza del braccio era: l = 20cm e i periodi
di oscillazione dell’ordine di 2000s . Furono misurati i periodi di oscillazione con
le sfere fisse “in quadrature” e quello in “congiunzione” (come nel caso di
Cavendish).
In quadrature:
β2
r2
α2
l
119
α2
θ l
α1
β1
r1
γ
l
α1
Cap. 3 – I campi
________________________________________________________________________
r12 = 2l 2 (1 − cos γ ) = r02 (1 − sin θ ) ,
r22 = 2l 2 (1 − cos(π − γ )) = r02 (1 + sin θ ) ;
α1 + β 1 =
r0 = 2l ;
2α1 + γ = π ⇒ α1 =
2
−
γ
2
⇒ β1 =
γ
2
=
π
2
4
⇒ α1 =
−
θ
2
π
2
− β1
e
, ne segue che:
1
θ
θ
(1 + ) . Egualmente:
+ sin ) =
2
2
2
2
2
π
π
α2 + β2 = ⇒ α2 = − β 2 e
2
2
π
π θ
π θ
2α 2 + + θ = π ⇒ α 2 = − ⇒ β 2 = + , da cui:
2
4 2
4 2
1
1
θ
θ
θ
cos β 2 =
(cos − sin ) =
(1 − )
2
2
2
2
2
La
componente
tangenziale
della
forza
totale
θ
1
1 − θ2
1
GMm 1 + 2
Ft = GMm 2 cos β1 − 2 cos β 2 =
−
r
r2
2r02 1 − sin θ 1 + sin θ
1
cos β1 =
1
(cos
θ
π
π
sarà
allora:
GMm 1 + θ2 1 − θ2
−
=
2 r02 1 − θ 1 + θ
3 GMm
θ
≈
2 2 l2
Il momento della forza totale dovuta alla gravitazione è :
3 GMm
TG = 2 r × F = rFt =
θ
2 l
Il momento totale pertanto è:
3 GMm
T = k −
θ
2 l
θ
l
P
θ0
Q
e il periodo di oscillazione è:
2ml 2
3 GMm
k−
.
2 l
In congiunzione, la bilancia oscilla
τ 1 = 2π
θ
intorno ad una posizione definita
O
dall’angolo θ0 , piccolo, ma sufficiente ad
evitare che le sfere si urtino.
r è la distanza fra le sfere e corrisponde
al segmento che sottende l’arco PQ .
β è l’angolo tra la tangente in P e la direzione
120
P
l
Q
l
β
Cap. 3 – I campi
________________________________________________________________________
della forza.
θ
cos
1
r = 2l sin ; Ft = GMm 2 cos β = GMm
2
r
θ
2
4l 2 sin 2
θ
≈ GMm
1
l θ
2 2
≈ GMm
1 1
2
− 3 δθ
2 2
l θ0 θ 0
2
Anche qui gli angoli (α.) alla base del triangolo isoscele OPQ sono uguali e
risultano complementari all’angolo al vertice diviso due. Del resto anche β è
complementare di
α. e dunque β=θ/2. Che porta ad un momento totale
(addizionando l’effetto dei due lati) pari a:
4
T = k + GMm 3 δθ
lθ 0
e dunque ad un periodo:
τ 2 = 2π
2ml 2
4GMm
k+
lθ03
A questo punto possiamo ricavare il k dalla prima e G dalla seconda:
2
k=
3 GMm 2π
2
+
2ml
τ
2 l
1
2
τ 2 = 2π
2ml 2
2
GMm 3
4 2π
2
+ 3 +
2ml
l 2 θ 0 τ 1
2
2π 2π
−
τ 2 τ1
⇒G =
M 3
4
+ 3
3
2l 2 θ 0
Un altro metodo per misurare G consiste nell’utilizzare una semplice bilancia.
121
Cap. 3 – I campi
________________________________________________________________________
Le masse (m) delle due sferette poggiate sui piatti sono uguali e la bilancia è in
equilibrio. Aggiungiamo una massa sferica (M) sotto uno dei piatti. Questa massa
Mm
attirerà la sferetta posta sul piatto di destra con una forza supplementare: G 2
r
(r è la distanza fra i centri delle sfere) che andrà compensata aggiungendo una
massa ∆ m sul piatto di sinistra. Perché si abbia di nuovo l’equilibrio dovrà essere:
Mm
g∆m = G 2 . Da questa equazione si ricava G. La misura fu eseguita da P.V.
r
Jolly nel 1881: G = 6,645 ⋅ 10−11 N ⋅ m 2 ⋅ kg −1 .
Come si è visto al par. 1 di questo capitolo, nella teoria Newtoniana è presente una
sorprendente identità di massa inerziale e massa gravitazionale. Il rapporto tra
queste due quantità dipende dalle unità di misura scelte: nelle unità di misura
appropriate il loro rapporto è e resta 1, se sperimentalmente il loro rapporto non
dipende dal materiale. Per dimostrare questo fatto, L. Eötvos utilizzò una bilancia
di torsione. L’asta della bilancia è orientata secondo la direzione Est-Ovest. Due
gravi uguali, ma di materiali diversi sono fissati ai capi dell’asta orizzontale e,
naturalmente, sono soggetti al loro peso ed alla forza centrifuga causata dalla
rotazione terrestre. Sono dunque soggetti ad una forza lungo la direzione del
raggio terrestre (versore r ), proporzionale alla loro massa gravitazionale ed ad
una forza perpendicolare all’asse terrestre (versore b ) proporzionale alla loro
massa inerziale. E’ intuitivo allora che la bilancia di torsione ruoti. Elaboriamo la
teoria di questo strumento.
Chiamiamo M ed m, rispettivamente, le masse inerziali e gravitazionali delle due
sferette (indicate con 1 e 2) agli estremi dell’asta orizzontale (di lunghezza l,
vettore l ) della bilancia di torsione. La forza totale sarà: F = F1 + F2 + f 1 + f 2 ,
dove f1 ed f 2 indicano le forze centrifughe ed F1 ed F2 le forze peso. Dalla
figura vediamo che la risultante delle due forze forma un angolo θ con la direzione
del raggio terrestre: il filo di sospensione giace proprio lungo questa direzione.
122
Cap. 3 – I campi
________________________________________________________________________
Alle due sferette potranno o no essere applicate le stesse forze: le forze peso
saranno le stesse avendo scelto le due sferette con lo stesso peso, ma le forze
centrifughe potrebbero essere diverse, se le masse inerziali fossero diverse. Come
conseguenza, l’angolo θ avrà valori diversi ai due lati della barra orizzontale. Se i
due angoli sono uguali, il braccio della bilancia rimane nella direzione Est-Ovest,
altrimenti no.
Asse terrestre
Centrifuga
θ
Piano di giacitura del filo di sospensione
ϕ
Equatore
Comunque, ci aspettiamo che i due angoli siano quasi uguali. Proiettiamo il
momento delle forze sul piano della sospensione e della direzione Est-Ovest. Se
esiste una piccola componente del momento su questo piano, la bilancia ruoterà.
Sia M il momento totale agente sulla bilancia. La componente del momento sul
M ⋅F
piano di giacitura della risultante sarà: M p =
e produrrà una rotazione di
F
un certo angolo se i due tipi di massa sono diversi. Calcoliamo dapprima il
prodotto scalare.
l
l
M ⋅ F = × ( F1 − F2 )r + × ( f1 − f 2 )b ⋅ ( F1 + F2 )r + ( f1 + f 2 )b =
2
2
l
l
× r ( F1 − F2 ) ⋅ ( F1 + F2 )r + × r ( F1 − F2 ) ⋅ ( f1 + f 2 )b +
2
2
l
l
+ × b ( f1 − f 2 ) ⋅ ( F1 + F2 )r + × b ( f1 − f 2 ) ⋅ ( f1 + f 2 )b =
2
2
l
l
= ( F1 − F2 )( f1 + f 2 )( × r ) ⋅ b + ( f1 − f 2 )( F1 + F2 )( × b ) ⋅ r
2
2
=
Il primo e l’ultimo termine sono nulli perché il prodotto vettore è perpendicolare
al vettore per cui si fa il prodotto scalare. Usando la proprietà circolare del
prodotto misto: a ⋅ (b × c ) = c ⋅ (a × b ) = b ⋅ (c × a ) , si può anche scrivere:
M ⋅F =
123
l
⋅ (r × b ) ( F1 − F2 )( f1 + f 2 ) − ( f1 − f 2 )( F1 + F2 )
2
. Ne segue che:
Cap. 3 – I campi
________________________________________________________________________
M ⋅F =
l
⋅ (r × b ) ⋅
2
⋅ ( M1 − M 2 ) g( m1 + m2 )ω 2 R cos φ − ( m1 − m2 )ω 2 R cos φ ( M1 + M 2 ) g =
= l ⋅ ( r × b )m1 m2 (
M1 M 2
) gω 2 R cos φ
−
m1 m2
dove: ϕ è la latitudine, R è il raggio terrestre, ω è la velocità angolare terrestre.
Come si vede già da questa formula, se il rapporto tra massa gravitazionale e
massa inerziale è lo stesso indipendentemente dal materiale, allora non c’è
momento torcente. Per completezza diamo il risultato finale del calcolo:
MV =
m m ω 2 R cos φ M1 M 2
M ⋅F
= l ⋅ (r × b ) 1 2
−
(
)
F
( M1 + M 2 )
m1 m2
Si noti che, disponendo il braccio della bilancia lungo la direzione Ovest – Est,
risulta l ⊥ r × b . Poiché i moduli dei versori valgono 1, ne segue che il modulo di
l ⋅ (r × b ) è determinato a meno del seno dell’angolo tra r e b , che può essere
determinato a partire dalla latitudine del luogo ove si effettua la misura.
124
Cap. 3 – I campi
________________________________________________________________________
Bilancia di torsione di L. Eötvos .
Metodo delle cariche immagini.
E’ un metodo utile per risolvere quei problemi di elettrostatica in cui siano assegnate
delle cariche o campi e delle superfici equipotenziali, come si ha nel caso di
conduttori immersi in un campo generato da cariche esterne. Consiste nel trovare
delle cariche aggiuntive, fuori dell’area in cui si vuole calcolare il campo, che diano
come superfici equipotenziali quelle assegnate all’inizio. Le superfici possono allora
essere ignorate o, eventualmente, si possono calcolare cariche indotte su di esse e
altre loro caratteristiche.
Esempio 1.
Calcolare il campo dovuto ad una carica puntiforme q a distanza x da un piano
metallico messo a massa (cioè a potenziale zero).
Dalla discussione del dipolo nel Cap. 3 delle dispense e delle sue superfici
equipotenziali, è chiaro che un piano passante perpendicolarmente per il centro della
125
Cap. 3 – I campi
________________________________________________________________________
congiungente le due cariche di segno opposto che formano il dipolo è equipotenziale
e può essere considerato a potenziale zero, data l’arbitrarietà del potenziale. Dunque
possiamo ridurre immediatamente il nostro problema a quello di calcolare il
potenziale di una coppia di cariche uguali e di segno opposto con distanza relativa
pari al doppio della distanza tra la carica e il piano assegnato. Questo problema è già
stato risolto e dunque si conoscono il potenziale ed il campo. Possiamo allora
calcolare anche le cariche indotte sul piano e la forza agente su di esso.
Y
ρ
-q
r
x
q
X
ρ+dρ
Prendiamo come asse X l’asse passante per la carica assegnata e perpendicolare al piano.
Il piano equipotenziale passa per l’origine. x è la coordinata della carica q . La carica di
densità σ indotta sul piano, è correlata al campo ortogonale al piano conduttore:
σ (ρ)
Ex =
. D’altra parte, il campo è quello dovuto alle due cariche formanti un dipolo e
ε0
pertanto
σ=
è:
Ex =
−q x −q
=
2π r 3 2π
−2 q x
σ 20
=
, da cui ricaviamo la densità di carica:
3
4πε 0 r
ε0
x
. La carica totale indotta sul piano sarà: Q = σdS ,
3
(x2 + ρ 2 ) 2
+∞
integrando: Q = ∫
0
Prendere la formula esatta del dipolo! Attenzione ai cambiamenti di simboli.
126
S
1
+∞
−
− q x 2πρ d ρ
2
2
2
ρ
=
qx
d
(
x
+
)
= − q , cioè una carica
∫
3
0
2π 2
2 2
(x + ρ )
uguale e contraria a quella assegnata.
20
∫
Cap. 3 – I campi
________________________________________________________________________
densità di carica vs distanza
1,0
0,9
0,8
σ(ρ) a.u.
0,7
0,6
0,5
0,4
0,3
0,2
0,1
0,0
0
2
4
ρ a.u.
La forza d’attrazione sul piano sarà allora:
dFx =
qdQ x qσ dS x
q 2σ
x2 ρ d ρ
q2 2 1
=
=
=
−
x d ( x 2 + ρ 2 ) −2 da
4πε 0 r 3 4πε 0 r 3 4πε 0 ( x 2 + ρ 2 )3/2
4πε 0 4
cui integrando tra zero e infinito: F x =
q2
, che è uguale alla forza (coulombiana)
16πε 0 x 2
che le due cariche del dipolo (a distanza 2x l’una dall’altra) esercitano l’una sull’altra:
q2
.
Fx =
4πε 0 ( 2 x) 2
Esempio 2.
Si abbia una carica puntiforme ed una sfera a massa. Il potenziale generato dalla carica
q
1
q
=
puntiforme è: V =
, in cui abbiamo posto
1
4πε 0 r0 4πε 0 2
2
2
(d + r − 2rd cos θ )
1
r0 = (d 2 + r 2 − 2rd cos θ ) 2 usando il teorema di Carnot. Per rendere la superficie della
sfera equipotenziale, occorre collocare una seconda carica puntiforme q’ in un punto a
distanza x dal centro della sfera in modo che questa seconda carica produca un potenziale
127
Cap. 3 – I campi
________________________________________________________________________
V’,
che
annulli
r=R
V
sulla
r0
r1
θ
O
V '( r , θ ) =
q'
1
=
4πε 0 r1 4πε 0
x
q
q’
d
q'
( x + r − 2 xr cos θ )
2
sfera.
2
=
q
1
4πε 0
( d + r − 2dr cos θ )
2
2
= V (r ,θ )
per r = R .
Posto r1 = ( x 2 + r 2 − 2 xr cos θ ) , usando nuovamente il teorema di Carnot. Vogliamo
che l’eguaglianza sia vera sulla superficie sferica, cioè per r = R . Perché sia così, deve
essere:
1
1
q ' (d 2 + R 2 − 2dR cos θ ) 2 = q ( x 2 + R 2 − 2 xR cos θ ) 2 ovvero:
q' 2 2
2
2
2
( q ) (d + R ) = ( x + R )
( q' ) 2 d = x
q
La soluzione cercata è:
V (r ,θ ) =
128
q' R
R2
=
e x=
. Sostituendo, il potenziale totale sarà:
q d
d
q
1
R
(
−
4πε 0 ( d 2 + r 2 − 2dr cos θ ) d
1
( x + r − 2 xr cos θ )
2
2
)=,
Cap. 3 – I campi
________________________________________________________________________
=
=
q
4πε 0
q
(
1
( d + r − 2dr cos θ )
2
2
1
1
−
)=
2
d
(R + r
− 2dr cos θ )
R2
2
2
1
(
−
4πε 0 d − r
,
)
d2
(R + r
− 2dr cos θ )
R2
che risulta essere nullo sulla sfera per r = R . La funzione V ( r , θ ) è dunque la soluzione
del problema elettrostatico costituito da un punto carica e una sfera a massa. A norma di
quanto detto precedentemente essa è la funzione di Green G per lo stesso problema, ma
con una distribuzione di carica con densità ρ . Sostituendo q con ρ dV e integrando sul
volume occupato dalle cariche, si ottiene la soluzione del problema elettrostatico di una
distribuzione di carica e di una sfera a massa:
1
1
1
1
V (r ,θ ) =
G ρ dV =
(
) ρ dV (al posto
−
2
4πε 0
4πε 0
d −r
2
2 d
V
V
(R + r
− 2dr cos θ )
R2
1
1
1
del semplice V ( r , θ ) =
G ρ dV =
ρ dV per il caso senza sfera a
4πε 0
4πε 0 d − r
2
∫
2
∫
∫
∫
V
V
massa). Se si vuole poi la sfera a potenziale non nullo, occorre aggiungere il valore del
potenziale sulla sfera conduttrice V0 .
Il campo elettrico (radiale!) si ottiene calcolando la derivata del campo lungo il raggio r:
Er = −
q
∂V
(
=
4πε 0
∂r
r
r − d cos θ
−
d2
− d cos θ
R2
)
3
d2 2
2
(d + r
( R + 2 r − 2dr cos θ )
R
Che per r = R ci dà la densità di carica sulla sfera perché : σ (θ ) = ε 0 Er ( R, θ ) :
σ=
2
2
−q
4π R
3
− 2dr cos θ ) 2
2
d 2 − R2
(d + R
2
2
3
− 2dR cos θ ) 2
.
Esempio 3.
Si abbia una sfera metallica immersa in un campo costante E0. Il campo abbia la direzione
dell’asse X, il potenziale sarà: V ( x) = − E 0 x . E’ intuitivo che la carica sulla sfera
conduttrice si polarizzerà in modo da dare un eccesso positivo su una semisfera e negativo
sull’altra. Proviamo dunque a vedere se con un dipolo d = q∆xi = di , in aggiunta ad un
campo uniforme, possiamo ottenere una sfera equipotenziale. Il potenziale di un dipolo
disposto sull’asse X, è stato calcolato nel Cap. 3 e aggiungendovi il campo costante, si ha
129
Cap. 3 – I campi
________________________________________________________________________
d
x
d
1
) cos θ , perché esso sia
4πε 0 r
4πε 0 r 2
costante (nullo) su una sfera centrata sull’origine di raggio r=R, deve essere:
d
1
d
1
V ( x) = V0 = (− E 0 R +
) cos θ ⇒ − E 0 R +
= 0 . Questa equazione ne
4πε 0 R 2
4πε 0 R 2
un potenziale totale: V = − E 0 x +
d
3
= (− E 0 r +
E0 R 3
) cos θ . Se sulla superficie sferica
r2
vogliamo un potenziale non nullo, basta aggiungere una costante. Possiamo poi calcolare
definisce il raggio: R =
3
4πε 0 E0
⇒ V = ( − E0 r +
il campo elettrico sulla superficie e, usando la relazione: E =
σ
come nell’esempio
ε0
precedente, la densità di carica di superficie.
∂V
d
1
Er = −
= (E0 + 2
) cos θ = 3E 0 cos θ e σ = 3ε 0 E 0 cos θ .
∂r
4πε 0 R 3
R
E0
θ
X
d
Possiamo a questo punto notare che la soluzione così calcolata è in effetti nella
forma calcolata come soluzione dell’equazione di Laplace (non ci sono in questo
problema distribuzioni di carica denotate da
ρ ) della forma
A
V (r ,θ , ϕ ) = R (r )Θ(θ )Φ (ϕ ) = l +1 + Br l Pl0 (cos θ ) calcolate precedentemente.
r
In questo caso B = − E0 , in modo che a grande distanza il potenziale si riduca a
V = − E0 r e quindi il campo a E0 . La costante A è scelta in modo da avere V = 0
sulla sfera.
Il terzo principio della dinamica e le forze tra due circuiti percorsi da correnti
La forza tra due circuiti è data a pag. 105 delle dispense che riscrivo nella forma:
130
Cap. 3 – I campi
________________________________________________________________________
F12 =
µ0
4π
∫ ∫i i
1 2
C1 C2
dl1 × dl 2 × r12
, in cui il circuito 1 subisce la forza del circuito 2 e
r123
r12 è la distanza dal circuito 2 al circuito 1, cioè dalla corrente che produce il campo a
quella che ne subisce la forza. Possiamo scrivere a questo punto la forza subita dal
circuito 2 a causa della corrente attraverso il circuito 1:
F21 =
µ0
4π
∫ ∫i i
1 2
C1 C2
dl 2 × dl1 × r21
, in cui: r21 = −r12 .
r213
Ricordiamo che: a × b × c = − ( a ⋅ b ) c + ( a ⋅ c )b e sostituiamo:
F12 =
+
µ0
4π
F21 =
µ0
4π
∫ ∫i i
1 2
C1 C 2
∫ ∫i i
1 2
C1 C 2
(dl1 ⋅ r12 )dl 2
r123
µ0
µ
dl × dl × r
i1i 2 ∫ 2 31 21 = − 0
∫
4π C
4π
r21
C
1
+
µ0
4π
µ
dl1 × dl 2 × r12
(dl ⋅ dl )r
= − 0 ∫ i1i 2 ∫ 1 3 2 12 +
3
4π C1 C2
r12
r12
∫ ∫i i
2
1 2
C1 C 2
∫ ∫i i
1 2
C1 C 2
(dl 2 ⋅ dl1 )r21
+
r213
(dl 2 ⋅ r21 )dl1
r213
I primi integrali delle due forze sono uguali e di segno contrario a causa del segno
contrario di
r21 e r12 , mentre dl1 ⋅ dl 2 = dl 2 ⋅ dl1 . I secondi due integrali sono invece
nulli perché le due espressioni:
altri termini:
( dl1 ⋅ r12 )
r123
dl ⋅ r = rdr , ovvero:
e
(dl 2 ⋅ r12 )
sono due differenziali esatti, in
r123
dl ⋅ r dr
1
= 2 = d ( − ) e integrati su un circuito
3
r
r
r
chiuso danno zero.
Il campo magnetico è uno pseudovettore
Prendiamo una densità di corrente lungo l’asse Z positivo del sistema di riferimento Σ,
j = (0, 0, j z ) e prendiamo un punto sull’asse Y a distanza y positiva dall’origine. Il campo
magnetico in questo punto è parallelo all’asse X e negativo: B
131
j × r con r = (0, z , y ) .
Cap. 3 – I campi
________________________________________________________________________
i
j
B 0
0
k
jz = − yjz i . Se andiamo adesso nel sistema Σ’, con i ' = −i , j ' = − j e
0
y
0
k ' = −k , abbiamo: B
i'
j'
0
0
0
−y
k'
− j z = − yjz i ' = yj z i , cioè un vettore con un verso
0
opposto a quello di prima. Tuttavia se calcoliamo la forza di Lorentz agente su una carica
positiva con velocità v = (0, v y ,0) , abbiamo:
i
j
k
i'
j'
k'
0 = v y j z yk e F '
0
−v y
0 = −v y j z yk ' = v y jz yk . Come
− jz y
0
0
− jz y
0
0
si vede le due forze hanno stessa direzione e verso, come deve essere.
F
0
vy
Z
X’
jz
O’
F = F'
y
r
B
Y
vy
B'
X
La parità e il campo magnetico in fisica classica
Definiamo il campo magnetico operativamente:
1. Prendiamo una carica unitaria positiva. La scopriamo soggetta ad una forza magnetica.
2. Chiamiamo X (positivo) l’asse lungo il quale la forza si esercita (vedi disegno).
3. Osserviamo che risulta sempre che la forza e la velocità della particella sono ortogonali.
132
Cap. 3 – I campi
________________________________________________________________________
4. Facciamo ruotare il vettore velocità intorno in senso antiorario all’asse X, troviamo la
direzione e il verso della velocità per cui la forza ha un massimo ( v max ) e chiamiamo Y
l’asse orientato nella direzione e verso della velocità per cui la forza ha un massimo.
5. Facendo ruotare ancora la velocità attorno alla forza in senso antiorario, troviamo la
direzione e il verso per cui la forza diviene nulla. Chiamiamo Z positivo questo asse.
6. Definiamo “campo magnetico” il vettore il cui modulo è dato dal massimo valore della
forza diviso per la carica e la velocità e la cui direzione e verso sia quello dell’asse Z
positivo.
Fx
Z
Y
v
θ
X
F
θ
v max
Al passo 2., avremmo potuto però prendere il verso dell’asse positivo X quello opposto a
quello che abbiamo effettivamente preso, giacché vediamo dall’andamento di F in
funzione di θ , che la forza ha un minimo che tale è a causa del segno scelto, se avessimo
scelto il verso opposto, la forza avrebbe avuto un massimo. Se avessimo fatto così,
avremmo ottenuto una diversa figura:
Z
v
F
θ
Y
v max
X
Che però è solo la figura precedente ruotata di 180°intorno a Z. Il verso di B rimane lo
stesso. Se adesso, partendo dalla prima figura, invertiamo i sensi dei tre assi, le
133
Cap. 3 – I campi
________________________________________________________________________
componenti della forza e della velocità cambiano segno. Ne segue che il segno del campo
magnetico deve rimanere positivo, ovvero il campo magnetico si inverte sotto una
trasformazione di parità.
Problemi
1.
Date le masse dei nove pianeti del sistema solare, ed i loro raggi, completare la
tabellina, calcolando l’accelerazione di gravità sulle loro superfici.
Corpo
celeste
Sole
Mercurio
Venere
Terra
Marte
Giove
Saturno
Urano
Nettuno
Plutone
Distanza
dal
Sole(km)
0
5,8.107
1,1.108
1,5.108
2,3.108
7,8.108
1,4-109
2,8.109
4,5.109
5,9.109
Massa (kg) Raggio (km)
2,0.1030
3,2.1023
4,9.1024
6,0.1024
6,4.1023
1,9.1027
5,7.1026
8,7.1025
1,0.1026
1,1.1024
2433
6080
3386
71370
60369
24045
22716
5700
2.
Come sappiamo, Giove ha diversi satelliti. Si consideri Io, che abbiamo già incontrato
trattando la misura della velocità della luce. Esso orbita intorno a Giove in 42h 28m
16s, ad una distanza da Giove di 430.000km. Calcolare la massa di Giove.
3.
Calcolare la forza totale esercitata dal Sole sulla Terra. Se si volesse raddoppiare
questa forza strappando alla Terra una carica Q e portandola sul Sole, quanto
dovrebbe valere Q? Che lavoro si dovrebbe effettuare per portare questa carica sul
Sole?
4.
Confrontare l’attrazione gravitazionale tra un elettrone ed un protone (atomo
d’idrogeno) e quella coulombiana. Il raggio di un atomo d’idrogeno è d=10-10m.
5.
Si consideri l’atomo d’idrogeno come formato da una carica puntiforme positiva,
attorno alla quale si trova una distribuzione di carica negativa con densità
−
2r
a
, con a = 0,53 ⋅10 −10 m . Calcolare:
1) La costante ρ0, se la carica totale qe è quella di un elettrone
ρ (r ) = ρ 0 e
134
Cap. 3 – I campi
________________________________________________________________________
2) La carica totale all’interno della sfera di raggio a e l’intensità del campo elettrico
in funzione di r
6.
Data una carica q, che si trovi al centro tra due cariche lontane Q dello stesso segno di
q, calcolarne il moto lungo la congiungente delle due cariche Q (asse X).
7.
Data una carica q, che si trovi al centro tra due cariche lontane Q di segno opposto a
q, calcolarne il moto lungo la perpendicolare alla congiungente (asse Y).
8.
Due palline di massa m e carica q sono appese allo stesso punto con due fili di
lunghezza l. Calcolare l’angolo d’equilibrio fra i due fili (si supponga che l’angolo sia
abbastanza piccolo).
9.
Immaginiamo di voler costruire un razzo accelerando ioni con una differenza di
potenziale V. Conviene usare ioni pesanti o leggeri?
10. Per fare in modo che ioni di idrogeno vengano accelerati ad una velocità di 2km/s,
che differenza di potenziale occorre usare?
11. Una cinghia isolante larga 57cm viene fatta traslare con velocità uniforme di 0,45m/s.
Se essa equivale ad una corrente di 180µA, quale è la densità di carica sulla sua
superficie?
12. In un acceleratore di particelle circolare con un raggio di 35m, un fascio di 1⋅1010
protoni circola con velocità costante pari a c. Calcolare la corrente così prodotta.
13. Trovare la distribuzione di carica che produce il potenziale: ϕ (r ) =
q e −αr
.
ε0 r
14. Si calcoli il campo elettrico generato dalla distribuzione di carica dell’esercizio
precedente, usando l’equazione di Poisson.
15. Dimostrare che il potenziale coulombiano è soluzione dell’equazione di Laplace:
∆V = 0 .
16. Dimostrare, con il calcolo diretto, che il campo coulombiano ha rotore nullo.
17. Dimostrare, col calcolo diretto, che il potenziale V ( r ) =
ρ
all’equazione di Poisson: ∆V =
.
ε0
135
1
4πε 0
ρ (r ' )
∫ r − r ' dV
V
obbedisce
Cap. 3 – I campi
________________________________________________________________________
18. Dimostrare che, in analogia con il potenziale scalare V ( r ) =
µ
potenziale vettore si può scrivere come: A(r ) = 0
4π
1
4πε 0
ρ (r ' )
∫ r − r ' dV , il
V
J (r ' )
∫τ r − r ' dτ , dove τ rappresenta
il volume entro cui scorre la densità di corrente J .
19. Calcolare il potenziale generato da una distribuzione di carica unidimensionale
ρ ( x) = ρ 0 cos αx (cfr esempio d. pag. 118 delle dispense).
20. Calcolare il potenziale ed il campo elettrico generato lungo il suo asse da una
distribuzione costante di carica (di densità = λ) disposta sui lati di un quadrato di lato
2l.
21. Si consideri la pallina in figura, di massa m e con carica q, che si trova in equilibrio
sotto l’effetto del suo peso e della repulsione elettrostatica dovuta alla carica
superficiale distribuita con distribuzione costante σ su di un piano conduttore. Noto
θ, calcolare σ.
+
+
+
+
+
+
+
+
+
+
σ
136
θ
m
Cap. 3 – I campi
________________________________________________________________________
22. Un pendolo semplice di massa m, caricato con una carica q, oscilla sotto l’azione del
suo peso e quella di un piano orizzontale carico posto sotto il pendolo. Calcolarne il
periodo.
θ
m
σ
++++++++++++++++++++++++
23. Un elettrone è in orbita circolare intorno ad un filo carico con densità lineare λ.
Datane l’energia cinetica E ed il momento della quantità di moto L, calcolare velocità,
raggio dell’orbita e λ.
24. Dimostrare che il campo elettrico generato da una distribuzione costante di carica su
un filo infinito è irrotazionale.
25. Calcolare il campo elettrico generato sul proprio asse da una distribuzione uniforme
di carica posta su un disco di raggio R.
26. Dimostrare esplicitamente che il potenziale di un dipolo (a grande distanza dal
dipolo) obbedisce all’equazione di Laplace.
27. Dimostrare che il campo elettrico di un dipolo (a grande distanza dal dipolo) ha rotore
nullo.
28. In prossimità (diciamo 1m) di una bussola, un filo rettilineo conduce una corrente di
12A. In questo caso la bussola continua a dare correttamente il nord?
29. Un disco isolante di raggio R ha una carica q distribuita uniformemente sulla sua
superficie. Se il disco ruota con velocità angolare ω, calcolare il campo magnetico
nel centro ed il momento magnetico.
137
Cap. 3 – I campi
________________________________________________________________________
30. Il momento di dipolo della Terra vale 8,0 ⋅10 22 A⋅ m 2 . Che corrente deve passare in
una spira del diametro dell’equatore per generare questo momento di dipolo
magnetico?
2.
Soluzioni
1.
L’accelerazione di gravità è: g = G
Pianeta
Mercurio
Venere
Marte
Giove
Saturno
Urano
Nettuno
Plutone
Raggio (km)
2433
6080
3386
71370
60369
24045
22716
5700
M
R2
. La tabellina può così essere completata:
g(m/s2)
3,60
8,84
3,72
24,87
10,43
10,04
12,92
2,26
Lasciamo allo studioso lettore il compito di trovare su un manuale o su
un’enciclopedia il periodo di rotazione del pianeta e calcolare la correzione
all’equatore su g, dovuta all’accelerazione centrifuga.
2.
Dalle leggi di Newton, abbiamo: F = G
M G M Io
2
= M Ioω 2 R . Cancellando la massa
R
di Io ad entrambi i membri e tenendo conto della velocità angolare di Io
2π
= 4,1 ⋅ 10 − 5 rad / s , e della distanza da Giove, abbiamo:
ω=
152896
1
M G = ω 2 R 3 = 2 ⋅ 10 27 kg . Con questo metodo si può quindi calcolare la massa di
G
qualunque pianeta, nonché quella del Sole, purché tale pianeta abbia almeno un
satellite per il quale si siano misurati il periodo di rotazione e la distanza dal pianeta.
3.
E’ data dalla formula della gravitazione universale:
M M
1,9 ⋅ 10 30 kg ⋅ 5,98 ⋅10 24 kg
F = G S 2 T = 6,67 ⋅ 10 −11 Nm 2 / kg 2
= 3,37 ⋅10 22 N
11
2
R ST
(1,5 ⋅10 m)
1
Q2
= 3,37 ⋅ 10 22 N ⇒ Q = R ST F ⋅ 4πε 0 = 2,9 ⋅ 1017 C .
2
4πε 0 R ST
Il lavoro che occorre fare per portare una carica infinitesima dq dalla Terra al Sole,
una volta che una carica q sia già stata portata dalla Terra al Sole, è:
Dovrebbe essere: F =
138
Cap. 3 – I campi
________________________________________________________________________
dL =
L=
4.
q
1
dq .
4πε 0 RST
da
0
a
Q,
si
ottiene:
Q2
= 2, 5 ⋅ 1033 J .
8πε 0 RST
1
Applicando le formule di Newton e di Coulomb, si ricava che le due forze valgono:
FN = 1⋅10 −47 N e FC = 2,3 ⋅10 −8 N . Chiaramente, le forze gravitazionali non
terrebbero l’atomo unito.
+∞
5.
Integrando
1)
e = ρ0 ∫ e
−
2r
a
4π r 2 dr = πρ 0 a 3 ⇒ .
0
e
1, 6 ⋅ 10 −19 C
ρ0 = 3 =
= 3, 42 ⋅ 1011 C / m 3
3
−10
πa
π (0, 53 ⋅ 10 m )
L’integrale si calcola per parti:
−2 x
a
b
∫x
2
e
b
dx =
0
∫
0
+ ab(−
a
2
2b
−
e a
2x
2b
b
2x
2b
a −
a −
a −
a −
x d (− e a ) = − b 2 e a + a xd (− e a ) = − b 2 e a +
2
2
2
2
2
∫
0
)+
2 b
a
2
∫
d (−
0
a
2
2x
−
e a
2b
) = ( −b 2
a
a 2 a3 − a a3
−b
− )e
+
2
2
4
4
Da cui si vede che, se b = +∞ , il termine con la parentesi è nullo.
2) Nel secondo caso b=a e si ha:
a
Q = ∫ ρ0 e
−
2r
a
4π r 2 dr =πρ0 a3 (1 − 5e−2 ) = qe (1 − 5e−2 ) = 0,32 ⋅ e
0
3) Infine il campo è radiale (con verso dall’infinito all’origine) e si calcola con il
teorema di Gauss:
E (r ) =
=
1
r
4πε 0 r 2
0
1
−2 x
a
ρ0 1 a 2
(−r − ra)e
ε0 r2 2
139
∫ ρ0 e
4π x 2 dx =
−2 r
a
+
ρ0 1 r
∫e
ε0 r2 0
a2
(1 − e
2
−2 r
a
−2 x
a x 2 dx
=
−2 r
−2 r
ρ a
a
a2
) = 0 −(1 + )e a + 2 (1 − e a )
r
2r
ε 0 2
Cap. 3 – I campi
________________________________________________________________________
6.
In qualunque verso si muova la carica q essa è soggetta ad una forza di richiamo
qQ
1
1
dovuta alle cariche Q. La forza di richiamo è: Fx =
(
−
),
2
4πε 0 ( x 0 + x)
( x 0 − x) 2
dove
x0>>x
e
–x0
sono
le
posizioni
delle
due
cariche.
4 x0 x
qQ
qQ 4 x 0 x
qQ 1
. Il moto è pertanto
Fx = −
≈−
= −kx , con k =
4πε 0 ( x 02 − x 2 ) 2
4πε 0 x 04
πε 0 x 03
quello di un oscillatore armonico.
q
X
Q
7.
F
O
F'
Q
Anche in questo caso la carica q è soggetta ad una forza di richiamo che possiamo
qQ senθ
qQ
y
qQ y
scrivere come: F y = −2
= −2
≈ −2
= − ky ,
2
2
3
4πε 0 x 0 + y
4πε 0
4πε 0 x 03
2
2 2
( x0 + y )
con k =
qQ 1
. Di nuovo troviamo un oscillatore armonico.
2πε 0 x 03
Y
F
q
F'
θ
8.
Q del peso e della repulsione
L’equilibrio si raggiunge quando laOsomma vettoriale
Q
elettrostatica è nella direzione del filo e viene compensata dalla sua tensione:
tgθ ≅ θ =
9.
X
qE
q2
q2
q2
3
.
=
≅
⇒
θ
=
mg mg 4πε 0 4 x 2 mg 4πε 0 4( lθ )2
16πε 0 mgl 2
Ovviamente si è interessati ad espellere la massima quantità di moto possibile.
Dunque si vuole un alto flusso di ioni e si vuole che ciascuno ione abbia la massima
quantità di moto.
Se gli ioni dopo l’accelerazione sono non relativistici, allora:
p I = m I v I = 2Tm I = 2eVm I . A parità di potenziale acceleratore, la quantità di
moto è più grande per masse ioniche più grandi.
Se gli ioni sono relativistici dopo l’accelerazione:
140
Cap. 3 – I campi
________________________________________________________________________
1
1
(eV + m 0 c 2 ) 2 − m 02 c 4 =
e 2V 2 + 2em 0 c 2V
c
c
Anche in questo caso la massa maggiore fa guadagnare quantità di moto allo ione.
eV = T = c 2 p 2 + m 02 c 4 − m 0 c 2 ⇒ p =
10. Si tratta di una velocità dell’ordine di quelle dei gas di combustione di un razzo
chimico, dunque non relativistica:
1
eV = T = m p v 2 = 0,5 ⋅ 1,672 ⋅ 10− 27 kg (2 ⋅ 103 m / s) 2 = 3,34 ⋅ 10− 21 J ⇒
2
3,34 ⋅ 10− 21 J
V =
= 2,1 ⋅ 10− 2V
−19
1,6 ⋅ 10 C
Una differenza di potenziale dunque molto bassa. Possiamo sfruttare questo fatto per
espellere meno ioni, ma a più alta velocità che con un razzo chimico.
11. La corrente trasportata è:
i = σlv = σ ⋅ 0,57 ⋅ 0,45m / s = 180 ⋅10 −6 A ⇒ σ =
180 ⋅10 −6 A
= 7 ⋅10 − 4 C / m 2 .
0,57m ⋅ 0,45m / s
12. La carica che passa ad ogni giro nell’acceleratore è:
q = 1⋅1010 ⋅1,6 ⋅10 −19 C = 1,6 ⋅10 −9 C . Tale carica passa in un tempo pari a:
T=
q
2πR
= 7,3 ⋅ 10 − 7 s . La corrente sarà: i = = 2,19 ⋅10 −3 A .
T
c
13. Scriviamo l’equazione di Poisson, utilizzando le coordinate sferiche (vedere l’
introduzione matematica delle dispense) e la sola dipendenza da r del potenziale:
ρ (r )
1 d 2 d
ϕ (r )) = −
. Calcolando le derivate a sinistra si ottiene:
(r
2 dr
dr
ε0
r
ρ (r ) = q
α2
r
e −αr .
14. Riprendiamo l’espressione del laplaciano in coordinate sferiche (pag. XII
dell’introduzione matematica).
Le derivate rispetto agli angoli sono nulle per ragioni di simmetria. Si ha:
15. 1 ( d r 2 dV ) = − ρ (r )
dr
ε0
r 2 dr
Integrando una volta, si ottiene la stessa espressione del campo elettrico, derivata col
teorema di Gauss: −
141
ρ
dV
= E (r ) = 02
dr
ε 0r
r
2 −α x
∫x e
0
dx
Cap. 3 – I campi
________________________________________________________________________
15. Il potenziale coulombiano è proporzionale a 1/r. Basta dimostrare col calcolo
1
diretto che 1/r ha laplaciano nullo: ∆ ( ) = 0 . Del resto:
r
∂ 1
x
∂2 1
1
x2
( ) = − 3 ⇒ 2 ( ) = − 3 (1 − 3 2 ) . Da cui, sommando sulle tre componenti:
∂x r
r
∂x r
r
r
x2 + y2 + z2
1
1
∆ ( ) = − 3 (3 − 3
) = 0 . In effetti, ciò è vero ovunque tranne che
r
r
r2
nell’origine, dove il laplaciano diverge. Una tal funzione, nulla ovunque tranne che in
un punto dove diverge è chiamata delta ( δ ( x ) ) di Dirac ed ha come proprietà che
+∞
+∞
−∞
−∞
∫ δ ( x )dx = 1; ∫ δ ( x ) f ( x )dx = f (0)
limitata ad
con
f ( x ) una funzione qualsiasi,
x = 0.
x
E x = 3
r
y
16. Il campo coulombiano ha come componenti cartesiane: E y = 3 . Le tre
r
z
E z = 3
r
q
componenti hanno in effetti davanti il fattore:
che qui si è posto uguale ad
4πε 0
uno, per evitare di riscriverlo ogni volta. Il rotore si calcola, come sappiamo,
usando il determinante:
i
j k
∂E y
∂E y ∂E x
∂E
∂E
∂E
∂ ∂ ∂
=( z −
)i + ( x − z ) j + (
−
)k .
∂x ∂y ∂z
∂y
∂z
∂z
∂x
∂x
∂y
Ex E y Ez
Le
tre
∂E z ∂E y − 3 yz 3 yz
−
= 5 + 5 =0
∂z
r
r
∂y
∂E x ∂E z − 3 xz 3xz
componenti risultano pertanto pari:
−
= 5 + 5 =0 .
∂x
r
r
∂z
∂E y ∂E
− 3xy 3xy
− x = 5 + 5 =0
∂y
r
r
∂x
17. Il calcolo procede come all’esercizio precedente. Supponiamo di invertire
l’ordine tra integrazione e derivazione. Deriviamo sotto il segno di integrale.
142
Cap. 3 – I campi
________________________________________________________________________
L’integrando risulterà nullo e di conseguenza l’integrale sarà zero. Per esempio,
si ha:
1
1
1
∂
x
∂2
x2
(
)=−
⇒
(
)
(
1
3
).
=
−
−
3
3
2
∂x r − r '
∂x 2 r − r '
r − r'
r − r'
r − r'
Sommando sulle tre derivate si otterrà zero, come nell’esercizio precedente. Si deve
notare che questo calcolo vale nei punti in cui non c’è carica. Se si fa la derivata in un
punto in cui la densità di carica è diversa da zero, occorrerà derivare anche la densità
di carica e l’integrale non sarà più nullo.
18. Basta calcolare il rotore del primo e del secondo membro. Si vedrà che a destra
appare il campo magnetico, così si avrà: ∇ × A = B , il che prova l’asserto.
Eseguiamo i calcoli: A(r ) =
µ0
4π
µ0
J (r ' )
J (r ' )
∫ r − r ' dτ ⇒ ∇ × A(r ) = 4π ∫τ ∇ × ( r − r ' )dSdl
τ
, dove l è la curva chiusa del filo in cui scorre J e dS la sua sezione.
Jx
J (r ' )
Poniamo: ∇ × (
, H y = ... ecc...Attenzione! la
) = ∇ × H con H x =
r − r'
r − r'
derivazione va eseguita rispetto alle variabili non primate. Calcoliamo il rotore col
solito metodo:
i
j k
∂H y
∂H y ∂H x
∂H
∂H
∂H z
∂ ∂ ∂
=( z −
)i + ( x −
)j +(
−
)k =
∂x ∂y ∂z
∂y
∂z
∂z
∂x
∂x
∂y
HxH yHz
=
1
r − r'
3
(( J z ( y − y ' ) − J y ( z − z ' ))i + ( J x ( z − z ' ) − J z ( x − x' )) j +
+ ( J y ( x − x' ) − J x ( y − y ' ))k ) =
.
J × (r − r ' )
r − r'
3
Sostituendo, abbiamo:
∇ × A(r ) =
µ0
4π
J (r ' )
µ0
∫τ ∇ × ( r − r ' )dldS = 4π ∫τ
J × (r − r ' )
r − r'
3
dSdl =
µ0
4π
∫
idl × (r − r ' )
r − r'
3
. Qui
sostituiamo JdS con idl . Riconosciamo l’ultima espressione come quella a pag. 105
delle dispense, espressione che rappresenta appunto il campo magnetico.
19. Usando di nuovo l’espressione del laplaciano in coordinate polari, si ha:
ρ0
ρ
d 2V
= − 0 cos αx ⇒ V ( x) =
cos αx
2
ε0
dx
ε 0α 2
.
143
Cap. 3 – I campi
________________________________________________________________________
20. Il potenziale sull’asse a distanza x dal centro del quadrato è:
V ( x) = 4
λ
x2 + l 2
ln(
) (formula del potenziale sulle dispense). Da cui si
2πε 0
− l + 2l 2 + x 2
deduce che il campo elettrico ha solo la componente lungo X, pari a:
Q
x
.
Ex = 2
πε 0 x 2 + l 2 x 2 + 2l 2
(
)
21. L’equilibrio si raggiunge quando la risultante delle due forze tende solo ad
mgε 0
qE
qσ
allungare il filo di sospensione:
= tgθ =
⇒σ =
tgθ
mg
mgε 0
q
+
+
+
+
+
+
+
+
+
+
θ
m
qE
σ
mg
22. La forza totale agente sul peso del pendolo è: Ftot = eE + mg = − m( g +
eE
)j,
m
dove il versore j indica la direzione verticale (verso l’alto). Dunque a patto di
fare la sostituzione: g ' = g +
144
eE
, si ottiene la solita formula del pendolo
m
Cap. 3 – I campi
________________________________________________________________________
semplice. Il periodo è: T = 2π
l
e g’ sarà più grande o più piccola di g a
g'
seconda del segno di eE.
23. Dal secondo principio della dinamica:
4πε 0
v2
v2
1
2
1
λe
=m
⇒E=m
=
eλ ⇒ v =
E =
eλ e λ = E
e
2πε 0 r
r
2
4πε 0
m
2πε 0 m
1
Dalla conoscenza del momento della quantità di moto: L = mvr ⇒ r =
L
.
mv
24. Il campo elettrico generato dal filo infinito con densità di carica λ è dato da:
1 λ r
E=
, dove r = x 2 + y 2 . Le componenti del vettore E sono:
2πε 0 r r
x
E x ∝ 2
r
y
Calcolando
le
E y ∝ 2 .
r
E z = 0
∂E z ∂E y
−
=0
∂z
∂y
∂E x ∂E z
=0
−
.
∂x
∂z
∂E y ∂E x − yx xy
−
= 4 + 4 =0
∂y
∂x
r
r
componenti
del
rotore,
si
trova:
25. Dividiamo il disco in corone circolari di larghezza infinitesima, la cui area e
carica siano rispettivamente: dS = 2πrdr e dq = σdS = 2πσrdr , con σ la densità
di carica. Ciascuna di queste corone circolari genera sull’asse a distanza x dal
centro del disco un campo che abbiamo calcolato nelle dispense a pag. 119 e che
è:
dq
x
1
σrdr ∂
dE x ( x, r ) =
=−
(
) . Il campo totale si ottiene
3
1
4πε 0
2ε 0 ∂x
2
2 2
2
2 2
(r + x )
(r + x )
integrando su tutto il disco:
145
Cap. 3 – I campi
________________________________________________________________________
σ ∂
E x ( x) = −
2ε 0 ∂x
R
∫
rdr
0
(r 2 + x 2 ) 2
1
σ ∂
=−
2ε 0 ∂x
R
∫
0
1
∂ 2
(r + x 2 ) 2 dr =
∂r
x
− 1
2
2
R +x
C’è da notare che al limite per R che tende a infinito il disco diventa un piano ed il
1
σ ∂
σ
=−
(( R 2 + x 2 ) 2 − x) = −
2ε 0 ∂x
2ε 0
campo diventa: E x =
σ
, come atteso.
2ε 0
26. Il potenziale di un dipolo di cariche disposto lungo l’asse X è dato da:
V ( x, y , z ) =
∂
2
(
d
4πε 0 r 3
x
∂x 2 r
x
)=−
3
9x
r5
+
. Dimostriamo che: ∆(
15 x
r7
3
e per la y:
x
) = 0 . Infatti:
3
r
∂ x
1 3x 2
( 3)= 3 − 5 ,
∂x r
r
r
3xy ∂ 2 x
∂ x
3 x 15 xy 2
( 3)=− 5 ,
. Il
(
)
=
−
+
∂y r
r
∂y 2 r 3
r5
r7
calcolo per la z è come quello per la y:
∂2
(
x
∂z 2 r
)=−
3
3x
r5
+
15 xz 2
r7
. Sommando le tre
derivate seconde si ottiene zero.
27. Il campo elettrico di un dipolo è stato calcolato all’esercizio 13 del Cap. 3 delle
1 3x 2
E
=
− 5
x
r3
r
3 xy
dispense. Le componenti di E sono: E y = − 5
. In realtà, c’è un fattore
r
3 xz
E z = − 5
r
d
) davanti a queste espressioni, fattore che qui si pone uguale a 1
4πε 0
per evitare di riscrivere lo stesso termine moltissime volte. Questo problema
dovrebbe fare riflettere l’attento studioso sulla saggezza di usare sistemi di unità
1
che evitano i fattori del tipo
, almeno nel lavoro teorico. Il rotore è
4πε 0
calcolato usando il determinante:
costante (
146
Cap. 3 – I campi
________________________________________________________________________
i
j k
∂E y
∂E y ∂E x
∂E
∂E
∂E
∂ ∂ ∂
=( z −
)i + ( x − z ) j + (
−
)k .
∂x ∂y ∂z
∂y
∂z
∂z
∂x
∂x
∂y
Ex E y Ez
Le
tre
∂E z ∂E y 15 xyz 15 xyz
−
= 7 − 7 =0
∂z
r
r
∂y
∂E
∂E
− 3z 15 x 2 z 3z 15 x 2 z
+ 5 −
=0 .
componenti sono: x − z = 5 +
∂x
r
r7
r
r7
∂z
∂E y ∂E
− 3 y 15 x 2 y 3 y 15 x 2 y
− x = 5 +
+ 5 −
=0
∂y
r
r7
r
r7
∂x
µ 0i
= 2,4 ⋅ 10 − 6 T .
2πr
Se disponiamo il filo in modo che il campo magnetico generato sia
perpendicolare al campo magnetico terrestre, possiamo ottenere uno scostamento
B
2,4 ⋅10 −6 T
=
massimo di tgθ =
cioè un angolo di 2° e 45’.
BT
5 ⋅10 −5 T
28. Il campo magnetico generato dalla corrente nel filo vale B =
29. Consideriamo una corona circolare delimitata dai raggi r e r+dr. Essa ha carica
dq = σ 2πrdr e, ruotando, genera una corrente infinitesima pari a:
dq
ω
= dq
= ωσ rdr . Può quindi essere equiparata ad una spira che produrrà un
T
2π
µ
1
campo magnetico infinitesimo nel proprio centro: dB = 0 di = µ 0σωdr .
2r
2
Integrando tra 0 ed R, si ottiene il campo magnetico:
q
q
1
1
1
B = µ 0σωR = µ 0ωR 2 = µ 0ω
. Il momento magnetico è:
2
2
2
πR
πR
di =
dm = πr 2 di = πr 3ωσdr ⇒ m = πσω
R 4 qωR 2
=
.
4
4
30. m = iS = iπRT2 = i ⋅1,275 ⋅1014 m 2 ⇒ i =
147
8,0 ⋅10 22 Am 2
1,275 ⋅10 m
14
2
= 6,28 ⋅10 8 A