Polo per la Chimica e le Biotecnologie Ambientali
e Sanitarie
Istituto d’Istruzione Superiore
Ada Gobetti Marchesini – Luigi
Casale – Torino
Orientamento Formativo in collaborazione
con il Politecnico di Torino
Prof. Pietro MANTELLI
[email protected]
LEZIONE 3
Tratta da materiale didattico predisposto dal Politecnico di
Torino
Orario delle lezioni:
dal 11/11/2014 al 16/12/14
martedi -14:30 – 15:50 aula 2 lim
http://orienta.polito.it/OrientamentoFormativo.html
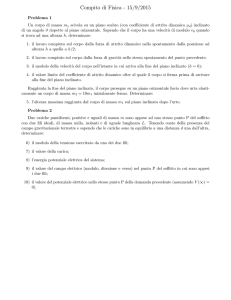
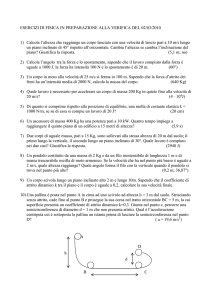
PIANO INCLINATO
La massa m scivola su un piano scabro, inclinato di
un angolo θ rispetto al livello orizzontale. Sapendo
che la massa inizia a scivolare partendo dal punto
A, posto ad altezza h rispetto all’orizzontale, con
velocità iniziale v0 (parallela al piano), calcolare:
1. l’accelerazione lungo il piano inclinato,
2. la velocità lungo il piano inclinato,
3. la velocità finale (in B).
y
x
r
v0
A
(m )
h
r
vB
θ
B
AB =
h
sinθ
C
Diagramma di corpo libero
Un diagramma di corpo libero è la rappresentazione
schematica delle forze agenti su di un corpo libero,
utilizzata spesso in fisica e ingegneria. Questo tipo di
diagramma può semplificare la comprensione delle
forze e dei movimenti agenti su di un corpo, e
suggerire i concetti adeguati da applicare per
risolvere le equazioni del moto.
Approccio dinamico: PRINCIPI DELLA DINAMICA
Approccio energetico: PRINCIPIO DI CONSERVAZIONE DELL’ENERGIA
3
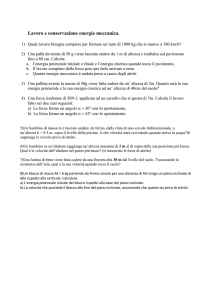
Scomposizione della FORZA PESO
componente tangente (parallela)
e componente normale (perpendicolare)
y
(m )
Pt = mg sinθ
θ
B
r
Pt
x
Pn = mg cosθ
θ
r
P
A
h
r
Pn
C
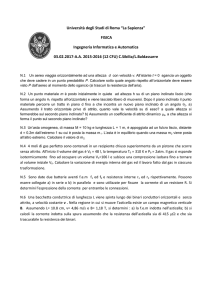
FORZA RISULTANTE
y
(m )
Pt = mg sinθ
θ
B
r
Pt
x
Fd = µ d N = µ d mgcosϑ
Pn = mg cosθ
θ
r
P
A
h
r
Pn
C
r r
r
r
∑ F = P + N + µ d N = ma
mgsin ϑ − µ d mgcos ϑ = max
mgcos ϑ − N = may = 0
FORZA RISULTANTE
y
(m )
A
x
h
θ
C
B
r r
r
r
∑ F = P + N + µ d N = ma
mgsin ϑ − µ d mgcos ϑ = max
mgcos ϑ − N = may = 0
ACCELERAZIONE
r r
r
r
∑ F = P + N + µ d N = ma
mgsin ϑ − µ d mgcosϑ = max
mgcosϑ − N = may = 0
ax = g(sin ϑ − µ d cosϑ )
ay = 0
la componente tangenziale ax non è mai nulla
la componente normale ay è sempre nulla.
L’accelerazione NON dipende dalla massa.
IL MOTO E’ UNIFORMEMENTE ACCELERATO
RISPOSTA ALLA DOMANDA 1
7
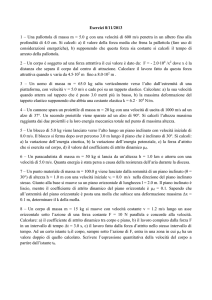
VELOCITA’
IL MOTO E’ UNIFORMEMENTE ACCELERATO
v2 = v02 + 2ax
v = v0 + at
a = g(sin ϑ − µ d cosϑ )
x=
v = v + 2gh(1− µ d cot ϑ )
cot ϑ =
2
0
la velocità è una funzione crescente con l’altezza
la velocità è proporzionale al tempo.
RISPOSTA ALLA DOMANDA 2-3
cosϑ
sin ϑ
velocità
2
h
sin ϑ
v0
altezza
8
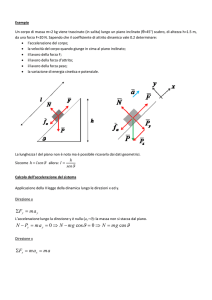
Casi limite
a = g(sin ϑ − µ d cosϑ )
In assenza di attrito:
Piano verticale:
x=
h
sin ϑ
h
a = gsin ϑ = g
x
a= g
a = −gµ d
Piano orizzontale:
v = v + 2gh(1− µ d cot ϑ )
2
0
In assenza di attrito o su piano verticale:
Piano orizzontale:
v2 = v02 + 2gh
v2 = v02 − 2gµ d x
velocità
2
spostamento
Piano orizzontale senza attrito:
v = v0
9
Approccio dinamico: PRINCIPI DELLA DINAMICA
Approccio energetico: PRINCIPIO DI CONSERVAZIONE DELL’ENERGIA
VELOCITA’
La determinazione della velocità, con la quale la massa m si muove
lungo il piano inclinato, è fattibile applicando il teorema dell’energia
cinetica:
Il LAVORO complessivo delle forze applicate alla massa
è uguale
alla VARIAZIONE DI ENERGIA CINETICA K =
1 2
mv
2
1 2 1 2
L = K B − K A = mvB − mvA = ∆K
2
2
10
Ricordando la definizione di lavoro compiuto da una forza (prodotto
scalare fra forza e spostamento), la determinazione di LAB si riduce
nel caso del piano inclinato al calcolo di due contributi:
─ quello della componente tangenziale della forza peso che,
avendo stessa direzione e verso dello spostamento AB (ϑ=0), ha
segno positivo
r r
h
LP = F ⋅ s = mgABsin ϑ = mg
sin ϑ = mgh
sin ϑ
─ quello della forza di attrito dinamico che, essendo antiparallela
con lo spostamento AB (ϑ=180°),
ϑ
ha segno negativo
r r
LFd = F ⋅ s = Fd ABsin ϑ = Fd ABsin180° = −Fd AB = −µ d mgcosϑ AB = −µ d mgcosϑ
h
= −µ d mghcot ϑ
sin ϑ
Per il teorema dell’energia cinetica, si ricava
L = mgh− µ d mghcot ϑ = mgh(1− µ d cot ϑ )
1 2 1 2
mvB − mvA = 2gh(1− µ d cot ϑ )
2
2
v2 = v02 + 2gh(1− µ d cot ϑ )
stesso risultato ottenuto con approccio dinamico
11