Vincenzo Nassisi
UNIVERSITA’ DEGLI STUDI
LECCE
DIPARTIMENTO DI FISICA
Appunti di Strumenti di misura
INDICE:
Strumenti a bobina mobile……… 2
Tester……………………………. 6
Multimetro……………………… 9
Oscilloscopio TRC…………... 11
Sonda compensata……………... 19
Oscilloscopio digitale………….. 21
Codice resistenze……………… 25
Classificazione radiofrequenza... 26
Strumenti a bobina mobile
Gli strumenti ad equipaggio mobile sono i primi strumenti che l’uomo ha
sviluppato e potrebbero essere meglio definiti strumenti elettro-meccanici. Essi sono
sensibili ai valori di corrente, ma con l’utilizzo di opportuni trasduttori divengono
strumenti universali adatti a misurare molti altri parametri elettrici e non eletttrici.
Oggi però, non dovremmo più parlare di strumenti ad equipaggio mobile poiché
siamo continuamente invasi da sofisticatissimi strumenti di tipo elettronico quasi tutti
funzionanti mediante l’elettronica digitale e circuiti integrati. Però è molto interessante
conoscere gli strumenti ad equipaggiamento mobile, non tanto perché ce li troviamo
ancora in molte apparecchiature elettriche, tester e la strumentazione automobilistica, e
sono presenti in molti laboratori, ma soprattutto per i principi fisici che sfruttano per la
misura di grandezze fisiche.
Per spiegare il funzionamento di uno strumento ad equipaggio mobile è necessario
ricordare la relazione di Lorentz che esprime la forza su di una carica elettrica immersa in
campo elettrico e/o magnetico:
F = e E + ev × B
(1)
dove F è la forza sulla carica, e è la carica elementare, E e B sono rispettivamente il
campo elettrico e magnetico.
In pratica, difficilmente abbiamo singoli elettroni, liberi o in movimento, mentre
facilmente si hanno correnti elettriche. Esse in un campo magnetico fanno applicare una
forza sul proprio conduttore corrispondente a:
d F = I dl × B
(2)
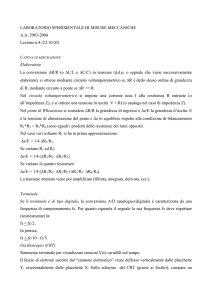
Ora immaginiamo un campo magnetico avente le linee di forza parallele ed una
spira di forma rettangolare percorsa da corrente I. La spira è vincolata a girare intorno ad
un asse passante per il centro dei due lati opposti come in figura 1. I lati AB e CD sono
soggetti ognuno ad una forza rivolta verso l’esterno che tende ad allungare la spira, di
entità:
FAB = ABIB sin ϑ
e FCD = CDIB sin ϑ
(3)
I lati della spira BD e AC sono invece soggetto ad una forza uguale a:
FAB = BC IB
e FCD = ADIB
(4)
Tenendo conto del vincolo della spira, il momento rispetto all’asse di rotazione è
dato dal contributo delle sole due ultime forze, cioè:
2
)
)
M = AB * BC * IB sin( 90 − ϑ )τ = AIB cosϑτ
(5)
)
dove A è l’area dell’intera spira e τ è il versore del momento delle forze che è entrante
nel piano del foglio.
Aggiungendo una molla elicoidale in modo da applicare un momento torcente
opposto a quello indotto dalla corrente nella spira con coefficiente di torsione K definito
come
Mmol
K=
(6)
ϑ
abbiamo allora:
AIB cos ϑ = Kϑ
da cui risulta che la correnti I provoca una rotazione ϑ della spira secondo la seguente
legge:
ϑ
ABI
=
(7)
cos ϑ
K
Figura 1. Spira vincolata, percorsa da corrente ed immersa in un campo magnetico
parallelo
3
Figura 2. Spira vincolata, percorsa da corrente ed immersa in un campo magnetico
radiale.
In questo modo però, risulta una relazione piuttosto complessa della rotazione della
bobina in funzione della corrente I. Questo inconveniente è possibile superarlo
avvolgendo la spira su un cilindro di ferro dolce e modificando le espansioni polari del
magnete in modo che le linee di forza del campo magnetico assumano una direzione
radiale rispetto all’asse di rotazione della spira come in figura 2. Ora le forze sui lati
longitudinali sono tangenti al cilindro ed il termine cos ϑ è sempre uguale a 1 e di
conseguenza il momento rispetto all’asse di rotazione è semplicemente dipendente da I
per cui si ha
I=
K
ϑ
AB
(8)
cioè una trasformazione lineare della corrente I in spostamento ϑ .
Per aumentare la sensibilità dello strumento si usano più spire in serie, cioè una
bobina di composta da n spire la cui sensibilità S è:
S=
dϑ nBA
=
dI
K
(9)
In questi tipi di strumenti tecnicamente, si usano due molle elicoidali per
controbilanciare il momento dovuto alla forza elettromagnetica. Esse sono situate, una
superiormente alla bobina e l’altra inferiormente ed oltre ad applicare un momento
torcente portano la corrente alla bobina fungendo da conduttori elettrici.
Esaminiamo ora, la dinamica della bobina mobile prima e il modo in cui raggiunge
la posizione di equilibrio. In prima approssimazione possiamo dire che l’equipaggio
mobile sollecitato da una corrente continua I, raggiunge la posizione di equilibrio a causa
delle forze d’attrito del proprio asse di rotazione e della contro forza meccanica che la
bobina subisce durante il movimento. Se la forza d’attrito non esistesse avremmo un ago
solidale con la bobina che oscillerebbe intorno alla posizione di equilibrio. Quindi, se
uguagliamo il momento M prodotto dalla corrente con il momento dovuto all’inerzia
4
dell’equipaggio più quello prodotto dalle forze d’attrito ed il momento dovuto alla forza
di reazione della molla si ha la seguente equazione:
d 2ϑ
dϑ
+µ
+ kϑ = M
(10)
2
dt
dt
dove J è il momento d’inerzia dell’equipaggiamento mobile, µ è il coefficiente d’attrito
e kϑ è il momento della molla. L’Eq. 8 è un’equazione differenziale del 2° ordine non
omogenea e la posizione finale si ottiene ponendo i termini contenenti le derivate di ϑ
uguali a zero:
J
kϑ = M
In pratica l’ago raggiunge la posizione di equilibrio in infiniti modi in dipendenza
dai valori assunti dai coefficienti J, µ e k.
Un andamento è quello sottocritico ed è caratterizzato dal fatto che la posizione di
equilibrio viene raggiunta dall’ago dopo una serie di oscillazioni intorno alla posizione di
equilibrio (caso 1 in Fig. 3); un secondo andamento è detto sopracritico ed è
caratterizzato dal fatto che la posizione di equilibrio è raggiunta teoricamente dopo un
tempo infinito senza oscillare (2); un terzo andamento è detto critico ed è simile a quello
sopracritico, ma si differisce dal fatto che la posizione di equilibrio è raggiunta nel più
breve tempo possibile.
Figura 3. Andamento dell’indice di
uno strumento ad equipaggiamento
mobile.
Per la costruzione di strumenti si cerca di superare la posizione di critico e si preferisce che l’ago raggiunga la posiz
Un caso specifico: Strumenti con scale quadratiche
Essi si basano sul principio di funzionamento degli strumenti ad equipaggio mobile
dove il campo magnetico è ottenuto mediante una bobina alimentata con la stessa
corrente che fluisce nella bobina mobile. In questo modo poiché il campo magnetico
prodotto nel traferro (zona tra le espansioni polari), è proporzionale alla corrente I e lo
spostamento della bobina risulta direttamente proporzionale sia ad I che a B quindi a I2 .
ϑ ∝ I2
Uno strumento con una tale relazione permette di effettuare misure di correnti
alternate poiché il momento torcente della corrente alla bobina risulta sempre dello stesso
segno, indipendente dal segno della corrente. Insomma, noi dovremmo vedere l’ago dello
5
strumento oscillare nel verso positivo dello zero; i.e. dalla posizione zero per una corrente
nulla ad una posizione ϑ per una corrente I. In particolare, per correnti di frequenza
superiore a 10 Hz, l’inerzia della bobina non è in grado di seguire l’intensità di corrente e
quindi resta ruotata dell’angolo massimo indicando il valore massimo dell’intensità.
Classe di uno strumento.
La classe di uno strumento è l’indice di precisione e quindi dell’affidabilità dello
strumento. Consci del fatto che non esistono strumenti di precisione infinita, dobbiamo
accettare che ogni misura che eseguiamo è affetta da errore in funzione dello strumento
utilizzato. Da qui nasce la necessità di associare ad ogni strumento una precisione definita
classe di precisione.
La classe di precisione di uno strumento è l’errore massimo che lo strumento può
commettere riferito al valore del fondo scala (f.s. massimo valore di lettura) e
moltiplicato per 100. Sono usate ben 11 valori di classe di precisione da 0.005 a 5.
c=
dx
100
X fs
Da questa relazione è immediato come graduare una scala di lettura. i.g. uno
strumento di classe 1 e valore di f.s. 50 V commette un errore di lettura di ± 0 ,5 V.
Pertanto la graduazione della scala deve essere eseguita con intervalli non più piccoli del
doppio dell’errore, 1 V.
Il tester
Ogni strumento a bobina mobile è in grado di misurare un gran numero di
parametri soprattutto elettrici: correnti, tensioni, resistenze, capacità, ecc. Il tester è
praticamente uno strumento avente un equipaggio mobile ed un circuito elettrico che
adatta l’equipaggiamento mobile a misurare, oltre ai parametri suddetti, anche valori di
parametri alternati.
Misure di intensità di corrente continua.
Un semplice strumento a bobina mobile esegue misure di intensità di corrente fino
a ~40 µA e la resistenza presentata dal filamento della bobina è di circa 2000 O.
Aggiungendo una resistenza in parallelo alla bobina mobile si ottiene un circuito partitore
di corrente che incrementa il valore massimo di corrente di
Figura 4. Schema elettrico di un partitore di corrente.
R +R
( R i + R ) / R . Cioè la corrente massima misurabile diviene I = I f . s. i
con I fs la
R
corrente di fondo scala della bobina. Il potenziometro in serie alla bobina serve per tarare
lo strumento.
6
È possibile verificare i valori di ognuno dei fondo scala, calcolando il valore di R e
di Ri corrispondenti da un qualsiasi morsetto e il morsetto comune.
Figura 5. Schema di un tester usato come amperometro con più scale
Con l’aggiunta di alcune resistenze, lo strumento diviene adatto a misurare valori di
differenze di potenziale; infatti, se la resistenza interna della bobina è di circa 2 kO, ed il
suo valore massimo di corrente ~40 µA, la caduta di potenziale ai capi della bobina è di
~80 mV. Aggiungendo delle resistenze in serie al circuito si ottiene un partitore di
tensione che rende lo strumento abile ad eseguire misure di tensione. Per esempio, con
una resistenza da 48000 Ω, la tensione massima di lettura risulta di
V = IR = 40 x10 −6 x (48000 + 2000 ) = 2 V
vedere Fig. 6. Aumentando la resistenza serie, aumenta la portata dello strumento.
Figura 6. Schema di un tester usato come voltmetro con più scale
Fissato il valore di fondo scala, il valore di resistenza da scegliere, per
valore prefissato di fondo scala, si trova dalla seguente relazione:
V
R=
− 2000 .
40µ
Per la misura dell’intensità di corrente e tensione in regime alternato si
diodo in serie alla bobina mobile il quale permette il passaggio della corrente in
verso. Con una graduazione diversa della scala si eseguono misure in corrente
per una sola frequenza e chiaramente alla frequenza di rete 50 Hz.
Per la misura di resistenza invece, il circuito si modifica nel seguente modo:
avere il
usa un
un solo
alternata
7
Figura 7. Schema di un tester usato come ohmmetro con più scale
Scegliendo un qualsiasi morsetto il circuito elettrico visto tra il morsetto O e quello scelto
si semplifica nel seguente modo:
Figura 8. Schema sintetico di un ohmmetro
La corrente che circola nella bobina è determinata dalla legge di Ohm:
I=
V
R + Rx
Sapendo che la tensione V è costante, la corrente I varia inversamente con
l’aumentare della R x . Un accorgimento da rispettare durante le misure di resistenza, è
l’azzeramento. Prima di inserire la resistenza R x da misurare, cortocircuitare i morsetti e
manovrare il potenziometro di 10 kO in modo da far circolare una corrente massima o di
fondo scala. La graduazione della scala, in questo caso non è lineare poiché lo
spostamento dell’indice dello strumento è proporzionale a 1 R x e la sensibilità risulta
uguale a:
8
dϑ
1
∝ 2
dRx
Rx
Questo risultato porta ad avere una scala graduata molto fitta all’origine, per Rx
molto grandi, e viceversa al fondo scala, per Rx molto piccoli.
S=
Multimetro digitale
DMM (Digital Multi-Meter)
A differenza del tester che può essere definito come uno strumento elettromeccanico, il multimetro è uno strumento di misura totalmente elettronico senza parti
meccaniche in movimento. Globalmente esso è costituito da un convertitore analogicodigitale (un convertitore A/D trasforma un segnale analogico in un segnale digitale) e da
un contatore. Inoltre con opportuni circuiti d’ingresso diviene uno strumento completo
capace di effettuare misure digitali di tensione continua ed alternata, di corrente continua
ed alternata, di resistenza di capacità, di temperatura e di amplificazione.
Se per il tester la misura più saliente è quella di corrente poiché è la causa della
rotazione della bobina mobile, per un multimetro invece, è la tensione applicata
all’ingresso del circuito che viene letta e registrata sul display. In pratica il cuore dello
strumento è un voltmetro in continua: DVM (Digital Volt-Meter).
I convertitori sono apparati elettronici in grado di trasformare un valore analogico,
per esempio un valore di tensione, in un numero di impulsi che mediante un sistema di
visualizzazione che esprime una dei numeri, si il valore della tensione analogica applicata
all’ingresso in cifre decimali.
I convertitori sono oggetti elettronici composti da amplificatori operazionali. Essi
sono in grado di operare solo in un campo di valori di tensione di ingresso abbastanza
ristretto. Per realizzare un voltmetro in continua, è quindi necessario preporre al
convertitore un sistema in grado di attenuare i segnali di ampiezza eccessiva e di
amplificare quelli troppo deboli, in modo da portarli entro il campo di lavoro del
convertitore. In figura 9 è riportato lo schema a blocchi di un voltmetro per tensioni
continue, realizzato con un convertitore a doppia rampa. Il circuito di ingresso è un
amplificatore operazionale reazionato mediante la resistenza variabile R2 .
R2
R1
C
-V R
comm. elett.
clock
R
logica di
controllo
Vi
contat ore
+VR
visualizzatore
circuito d'ingr esso
converti tore A/D
Figura 9. Schema di un multimetro digitale
9
Amplificatore operazionale
Un amplificatore è un circuito elettronico che amplifica il segnale d’ingresso
mentre un amplificatore operazionale è un amplificatore che ha due ingressi entrambi i
segnale degli ingressi vengono amplificati con la differenza che il segnale presente nel
morsetto etichettato col segno negativo, viene pure cambiato di segno. Pertanto, da questa
impostazione, il segnale d’uscita è funzione della differenza dei segnali in ingresso.
Av = vu
vi
Figura 9. Amplificatore operazionale
e
Av = vu
v1
Figura 10.Amplificatore operazionale
con un ingresso a massa
Il valore dell’amplificazione è molto alto. Un buon amplificatore ha come
amplificazione qualche milione. Nel caso ideale però, si impone che
Av = ∞ , Ri 1 = Ri 2 = ∞ e Ru = 0 . Chiaramente, se l’amplificazione dello strumento è
infinita, noi avremmo sempre un segnale infinito sul morsetto d’uscita indipendentemente
dal alore di vi. In pratica, questi circuiti hanno una resistenza di reazione che collega il
segnale d’uscita al morsetto d’ingresso negativo, moderando, in questo modo, il valore
del segnale in uscita. Ipotizziamo quindi una corrente d’ingresso i1 , essa fluirà in R1 e R2
nello stesso modo poiché l’ingresso 1 ha un’impedenza infinita e quindi non assorbe
corrente. Il potenziale dell’ingresso 1 non può essere differente da zero, altrimenti in
uscita si avrebbe un segnale infinito e quindi si approssima v1 a zero, cioè a massa
virtuale.
Figura
11.
Amplificatore
operazionale
reazionato mediante la resistenza R2
Il valore dell’amplificazione diviene:
10
A=
vu
IR
R
=− 2 =− 2
vi
IR1
R1
(11)
La resistenza R 1 è molto alta e ciò limita la corrente di assorbimento dello strumento.
Misura di una tensione incognita
Per la misura di una tensione incognita, il circuito d’ingresso bilancia il valore di
tensione prima di applicarlo al convertitore mediante la resistenza R2 . Il convertitore
integra il segnale d’ingresso e il condensatore C si carica e dà luogo ad una rampa,
crescente verso valori positivi, se vi è negativa o decrescente verso valori negativi, se vi è
positiva. Quando il condensatore raggiunge la saturazione, il circuito di clock, annulla il
contatore e scarica il condensatore applicando una tensione in ingresso.
A questo scopo occorre però che la logica di controllo sia in grado di distinguere il
verso della rampa d’integrazione di ingresso, collegando poi +VR se vi è negativo o -VR se
vi è positivo, onde ottenere la scarica di C. Il clock esegue dei conteggi fino alla scarica
del condensatore ed il numero di conteggi è proporzionale al valore di tensione.
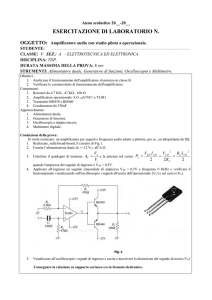
Oscilloscopio TRC
Uno strumento molto importante e molto utilizzato da chi lavora nei laboratori
sperimentali, è l’oscilloscopio. Una volta esisteva solo un tipo di oscilloscopio, oggi
invece ne esistono di più tipi e quindi siamo costretti a differenziali.
I primi oscilloscopi erano costituiti da un tubo a raggi catodici ed erano anche
chiamati oscilloscopi TRC.
L’oscilloscopio permette di visualizzare qualsiasi differenza di un potenziale
dipendente dal tempo, in sostanza è un registratore luminoso di segnali elettrici molto
veloci.
Il dispositivo più saliente di un oscilloscopio TRC è il tubo a raggi catodici, cioè un
generatore di elettroni. Questi accelerati formano un fascio di raggi β che il compito di
impressionare, su di uno schermo fosforescente avente una griglia graduata, una traccia
luminosa rappresentante la differenza di potenziale.
Un oscilloscopio TRC è composto da un:
a)
generatore di elettroni
b)
sistema di accelerazione per gli elettroni
c)
sistema di placchette di deflessione orizzontale ed uno verticale
d)
anello di post accelerazione
e)
schermo
Tutto ciò è chiuso in bulbo di vetro mantenuto sotto vuoto
a)
Il generatore di elettroni genera un fascio di elettroni per effetto termoionico da un
catodo riscaldato da un filamento incandescente. Successivamente gli elettroni
11
attraversano il cilindro di Wehnelt il quale è polarizzato negativamente di qualche decina
di volt, rispetto al catodo emettitore e serve per regolare l’intensità della corrente elettrica
prima di essere accelerato.
b)
Il sistema di accelerazione è formato da elementi conduttori polarizzati
positivamente in maniera da accelerare gli elettroni. Questo sistema è un po’ complesso
poiché non è sufficiente un semplice conduttore carico per avere un’accelerazione bensì
una struttura che possa tenere collimato il fascio altrimenti si disperderebbe
spiaccicandosi sul conduttore. Allora si è sviluppato un sistema accelerante che
contemporaneamente collima il fascio e prende il nome di lente elettronica. Esso è
composto da due parti con in mezzo una griglia focalizzatrice (F) che è a potenziale più
alto del cilindro di formato di Wehnelt (W) e più basso delle griglie acceleratici.
Regolando la tensione della griglia focalizzatrice si controlla la messa a fuoco del
pennello elettronico sul piano dello schermo fosforescente. Variando invece, la tensione
del cilindro di Wehnelt si varia l’intensità della corrente del fascio e quindi l’intensità
luminosa della traccia sullo schermo. Il pennello di elettroni, uscendo dal sistema di
accelerazione, incontra le placchette di deflessione, collegate allo stesso potenziale
dell’ultimo anello di accelerazione per non decelerare il fascio. In questo modo gli
elettroni accelerati si propagano in un ambiente con campo elettrico approssimativamente
nullo.
Figura 12. Oscilloscopio TRC
c)
Le placchette di deflessione sono due conduttori piani affacciati; due per deviare il
fascio orizzontalmente e due verticalmente. La deviazione del fascio avviene a causa di
una differenza di potenziale applicata tra le placchette il cui valore è di gran lunga
inferiore rispetto ai valori applicati per l’accelerazione.
12
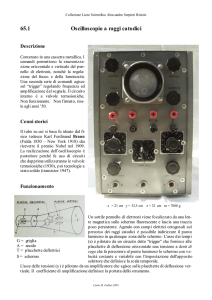
Figura 13. Traiettoria di un pennello elettronico in un campo elettrico E.
Ora consideriamo un fascio di elettroni che si appresta ad attraversare le placchette
di deflessione alle quali è stato applicato un potenziale Vp , figura 13. Il campo elettrico
tra esse risulta E = V P d dove d è la loro distanza. Essendo il campo elettrico
perpendicolare all’asse x, la velocità v0 del fascio di elettroni resterà costante lungo tutto
l’asse x, mentre lungo l’asse y varia dipendentemente da valore di Vp.
La forza cui è sottoposto ogni elettrone è
F = eE
e quindi l’accelerazione
ay =
eV p
md
(12)
con m la massa dell’elettrone.
Conoscendo ay possiamo ricavare la velocità lungo l’asse y in corrispondenza alla f.e.m.
applicata tra le placchette.
vy = a yt
dove t è la variabile temporale. Sostituendo in t il tempo necessario per attraversare le
placchette, valore dato esclusivamente dal rapporto s v0 , si conosce la velocità all’uscita
delle placchette di deflessione.
eVp s
v0y =
(13)
md v0
Quindi il fascio
lungo l’asse y avrà un moto uniformemente accelerato durante
l’attraversamento delle placchette per un tempo t 1 = s v0 ed un moto a velocità costante
dalle placchette allo schermo, cioè per un tempo t 2 = S v0 . Lo spostamento totale lungo
l’asse y sarà:
1
y 2 = a y t 12 + v0y t 2
(14)
2
Sostituendo nella 14 la 12, la 13 e il valore di t1 e t2 , abbiamo:
2
1 eVp s eV p s S
+
y2 =
2 md v0
md v0 v0
(15)
Quando il fascio abbandona le placchette ha una direzione del moto che la conserva
fino a raggiungere lo schermo. Questa direzione la possiamo calcolare dalla 14 ponendo
il tempo uguale a s v0 cioè
1
y2 = ayt 2
(16)
2
x2
dove in generale t 2 = 2 . Sostituendo l’espressione di ay e t 2 nella 16, essa diviene
v0
13
1 eV p
y2 =
2 md
x
v
0
2
(17)
Definendo
tg? =
dy eVp x
=
dx md v0 2
(18)
eV p s
md v0 2
(19)
Per x=s si ha
tg?0 =
Conoscendo tg?0 , l’eq. del moto può essere scritta come:
y 2 = y 1 + (x - s )t g?0
y1 =
dove
1 eV p s 2
2 md v0 2
(20)
(21)
Quindi y2 diviene
tg?0 =
eV p s 1
1
eV p s
s + x −s =
x − s
2
2
md v0 2
2
md v0
(22)
Per x = s 2 , l’Eq. 22 risulta uguale a zero e ciò è un importante risultato poiché
possiamo considerare come se il fascio abbia origine nel punto centrale delle placchette.
Il valore di y2 , quando il fascio arriva sullo schermo, si calcola della 15 ponendo
x = S + s , infatti
eV p s
1
y2 =
S + s
(23)
2
md v0
2
Ora sostituendo alla v0 il valore calcolato uguagliando l'energia cinetica di ogni elettrone
del fascio con l'energia potenziale della griglia acceleratrice;
eVa =
1
2
mv 0 ⇒ v0 =
2
2eVa
m
(24)
La 23 diviene;
y2 =
Vp s
1
S + s
2V a d
2
(25)
14
Dalla 25 si nota che la spostamento del punto luminoso sullo schermo è
direttamente proporzionale a Vp e inversamente a Va. La sensibilità dell'oscilloscopio sì
definisce come;
y
s
1
Sen = 2 =
S + s
(26)
V p 2Va d
2
Quindi un aumento del potenziale di accelerazione porta ad una diminuzione del valore
della sensibilità.
Tutti i conti svolti fin qui sono stati ottenuti considerando le placchette piane e
parallele. In pratica la geometria delle placchette è più complessa per diminuire gli effetti
ai bordi che noi abbiamo trascurato. Negli oscilloscopi esistono due coppie di placchette
deflettici; una coppia per la deflessione verticale (segnale da misurare) ed una per la
deflessione orizzontale, tra le quali viene applicata una tensione a dente di sega cioè una
tensione crescente linearmente con il tempo che fa sì che il pennello luminoso si sposti
linearmente lungo l’asse orizzontale dello schermo. Per migliorare il funzionamento
dell’oscilloscopio si pongono le placchette di deflessione verticale più lontane dallo
schermo in modo da aumentare la sensibilità verticale rispetto a quella orizzontale.
Ogni oscilloscopio ha la capacità di misurare d.d.p. continue e variabili. Per le
d.d.p. variabili, esiste un limite detto frequenza superiore o banda passante e significa che
un’onda sinusoidale con frequenza maggiore di quella superiore non viene misurata
dall’oscilloscopio. Questo limite è spiegato pensando al fascio di elettroni che
attraversando le placchette deflettici impiega un tempo finito. Ora se il tempo di
attraversamento è paragonabile o superiore al periodo del segnale da misurare, la forma
d’onda non viene visualizzata con fedeltà; generalmente presenta un’ampiezza più bassa.
Questo problema viene parzialmente superato per bande passanti sino a circa 100MHz,
aumentando la tensione di accelerazione con conseguente aumento della v0 e diminuendo
la lunghezza delle placchette. Queste modifiche comportano una diminuzione della
sensibilità.
Schermo
Lo schermo fosforescente dell’oscilloscopio è ricoperto di materiale facilmente
eccitabile con gli elettroni. Un qualsiasi materiale dopo un’eccitazione emette fotoni
spesso anche luminosi. La luminosità è detta fluorescenza se la durata della luce è minore
di 10-8 s, mentre fosforescente se è maggiore di 10-8 s. Gli schermi sono composti da
polvere di fosforo e ricoperti da un sottile strato di alluminio allo stesso potenziale
dell’anello di post-accelerazione per bloccare gli elettroni secondari.
Esistono oscilloscopi a memoria capaci di registrare impulsi di tensione variabile
fino ad una frequenza di circa 250MHz. Queste caratteristiche vengono raggiunte
eliminando le placchette di deflessione e sostituendole con un sistema ad onda
progressiva, figura 14. In questo caso il pennello di elettroni si propaga lungo il sistema
di deflessione ad onda progressiva insieme col segnale da misurare per tutto il tempo di
deflessione. In questo modo un segnale variabile da misurare non viene applicato
contemporaneamente su tutte la placchette, ma solamente ad un’estremità e dopo si
propaga insieme col gli elettroni.
15
Figura 14. Oscilloscopi con accelerazione ad onda progressiva.
Come usare l’oscilloscopio:
Tutte le manovre per usare l’oscilloscopio avvengono dall’esterno, sul pannello
frontale. Per facilitare tali operazioni l’oscilloscopio viene suddiviso in sezioni.
•
Sezione del tubo a raggi catodici:
Generalmente questa sezione ha quattro controlli. L’intensity controlla il livello
luminoso della Traccia e deve essere usato con moderazione. Un’intensità molto alta
rischia di bruciare il fosforo dello schermo. L’Astigmatism controlla la forma del fasio. Il
focus controlla la nitidezza della traccia e la rende più piccola possibile. Il trace rotation
controlla l’inclinazione della traccia rispetto all’asse orizzontale.
•
Sezione ingresso verticale:
In questa sezione si pone la tensione da misurare. Il segnale che noi applichiamo
non deve subire variazioni di forma e quindi non ci devono essere disadattamenti. Questo
segnale dopo essere amplificato viene applicato alle placchette deflettrici.
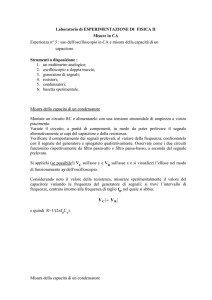
Un interruttore con tre posizioni, accoppia il segnale con l’ingresso
dell’oscilloscopio, detto DC, AC e GND. DC significa directy current, e collega
direttamente il segnale con l’ingresso dell’amplificatore verticale; AC significa
alternation current, e collega il segnale all’amplificatore verticale per mezzo di un
condensatore in serie. In questo modo vengono tagliate tutte le tensioni continue. GND
significa ground e collega l’ingresso dell’amplificatore alla massa conoscendo il valore
zero del potenziale.
Figura 15. Esempi di lettura
16
Nella figura 15b una tensione sinusoidale è sommata ad una tensione continua e
risulta difficile la visualizzazione totale sullo schermo, particolarmente quando la
tensione continua è molto elevata. Usando l’accoppiamento AC è possibile visualizzare
solo la componente alternata. Una manopola permette di variare la sensibilità a scatti
della scala verticale in volt/? , mentre un’altra seconda manopola permette di variare in
modo continuo la sensibilità della scala verticale. Infine il controllo della posizione
verticale permette di variare il livello zero della tensione.
•
Time base:
Questa sezione si preoccupa di applicare alle placchette orizzontali un segnale di
tensione a dente di sega e quindi si ha il movimento orizzontale del puntino luminoso
sullo schermo. Una manopola graduata in tempo/? indica il tempo necessario affinché il
puntino luminoso percorra una divisione. Questa scala può essere variata in modo
continuo. Una manopola controlla la posizione orizzontale della traccia.
•
Triggering:
Questa sezione è responsabile della stabilità della traccia sullo schermo. Quando si
hanno tensioni variabili è molto difficile avere una traccia stabile sullo schermo ed il
triggering sceglie le condizioni di inizio della traccia fissando l’intensità del segnale e la
sua derivata..
Figura 16. Esempi di lettura
Se il punto A è il punto di trigger, lo spazzolamento orizzontale del fascio di
elettroni avrà inizio ogniqualvolta il segnale ha le condizioni del punto A e sullo schermo
si vedrà una sovrapposizione della stessa funzione.
Figura 17. Esempi di lettura
con condizione di triggering
non corretto
17
Il punto di trigger viene scelto manovrando dall’esterno in modo da visualizzare un
intero periodo della forma d’onda senza incorrere a sovrapposizioni della stessa. In
pratica le sezione triggering comanda lo spazzolamento orizzontale del fascio di elettroni
mediante un segnale, quando il segnale da misurare ha determinate caratteristiche. Il
segnale di comando può essere scelto; INT (interno) è lo stesso segnale da misurare che
viene usato come segnale di trigger; EXT (esterno) è un segnale esterno che comanda lo
spazzolamento, LINE (Rete) è la tensione di alimentazione dell’oscilloscopio che
comanda lo spazzolamento. Quando si lavora in INT, il punto di trigger deve essere scelto
in modo che non provochi sovrapposizioni sfasate del segnale ma in fase, per cui la scelta
deve essere particolare. Perciò si ha a disposizione una manopola Level con la quale è
possibile scegliere il livello in ampiezza ed anche la possibilità di scegliere la derivata
positiva o negativa del segnale. In n questo modo, per il segnale visto prima, scegliendo
un punto della funzione d’onda tale da avere un livello positivo e derivata positiva si
eliminano le sovrapposizioni sfasate come in figura 18.
Figura 18. Esempi di lettura
di un segnale triggerato senza
sfasature
Modi del friggere
Il trigger ha tre modi:
-AUTO: funziona in maniera automatica, cioè si ha lo spazzolamento della traccia senza
nessun controllo del livello e della derivata.
-NORM: in modo normale, cioè lo spazzolamento del fascio avviene ogni volta che il
segnale all’ingresso del trigger ha le caratteristiche scelte.
-SINGLE-SWEEP: questo modo è usato quando si hanno segnali non ripetitivi e si ha un
solo spazzolamento della traccia.
•
Sezione Dual time base:
Molti oscilloscopi hanno la sezione Dual time base. La presenza di un secondo
tempo base per visualizzare un segnale. Molto spesso questo modo di funzionamento è
denominato spazzolamento ritardato Delayed Sweep. Cioè, volendo esaminare solo una
lunghezza d’onda della parte sinusoidale del segnale visto nella sezione di triggering con
Figura 19. Risultato dopo
l’amplificazione della scale
orizzontale
18
un solo tempo base, è praticamente impossibile in quanto non si può triggerare su un
punto della parte sinusoidale. Infatti amplificando la scala orizzontale si ottiene la figura
19.
Fissato invece il punto di trigger come prima si introduce, mediante un comando,
un tempo di ritardo prima che il segnale venga rappresentato sullo schermo. Manovrando
il secondo tempo base si amplifica solo il segnale presente sullo schermo, es.
Figura 20.
applicazione
Sweep.
Esempio di
del Delayed
•
Errore:
L’errore che si commette con l’oscilloscopio è dovuto alla fedeltà
dell’amplificatore verticale, all’errore con cui viene generata l’onda a dente di sega e alla
dimensione della traccia sullo schermo. Quasi tutti gli oscilloscopi hanno la divisione
orizzontale e quella verticale divisa in cinque parti in modo da far contenere tutti gli
errori nell’errore di lettura. Per ogni lettura si attribuisce un errore di ± 110 del valore di
una divisione.
Sonda Compensata
La sonda compensata o probe, permette di misurare segnali di tensione senza che
questi subiscano eccessive modifiche. Cioè quando si collega un generatore all’ingresso
dell’oscilloscopio lo schema elettrico è il seguente
Figura 21. Schema elettrico di
connessione.
dove V0 è la tensione da misurare e R0 è la resistenza interna del generatore, mentre C2 ed
R2
rappresentano l’ingresso dell’oscilloscopio. In questo modo, all’ingresso
dell’oscilloscopio è presente un segnale corrispondente alla V0 meno la c.d.p. nella R0 ,
cioè
19
V0
VA =
(27)
R0
1+
( j? C2 R2 + 1)
R2
Se la R0 fosse nulla, o l’ingresso dell’oscilloscopio avesse un’impedenza ∞, allora
l’oscilloscopio leggerebbe una tensione V0 fedele all’ingresso, ma ciò in pratica non
succede. Per superare queste limitazioni si usa porre in serie al circuito un parallelo R1 C1
come in figura 10 dove si è trascurata la R0 ,
Figura 22. Esempio di
applicazione di una sonda
compensata
In questo modo la tensione all’ingresso dell’oscilloscopio diviene:
VA =
1
R1
j? C2 R 2 + 1
1+
j ? C1 R1 + 1
R2
V0
(28)
e se si sceglie R1 C1=R2 C2 , la VA diviene indipendente da ω ed il sistema si dice
compensato e la funzione di trasferimento si semplifica nel seguente modo:
VA =
R2
V
R1 + R2 0
(29)
cioè un semplice partitore di tensione.
In pratica quasi tutte la maggior parte delle sonde presentano una R1 =9 MΩ e la C1
variabile in modo che tutta la sonda possa essere facilmente adattata a più oscilloscopi,
cioè ad ottenere il prodotto R1 C1 =R2C2 . L’ingresso dell’oscilloscopio è circa 1MΩ||20pF,
e quindi ne risulta una attenuazione A=0,1.
Un limite dell’oscilloscopio è il valore massimo della frequenza del segnale che
può registrare o/e il tempo di salita più piccolo che può registrare. In pratica i due valori
sono vincolati. Infatti, un quarto del periodo dell’onda della frequenza massima può
essere considerato come il più piccolo valore temporale che può essere registrato. In
pratica si usa la seguente relazione per passare dalla banda passante al tempo di salita;
350
tr =
( ns)
(30)
f ( MHz )
con t r il tempo di salita ed f banda pasante. Il tempo di salita è definito come il tempo
necessario a portare il valore dell’impulso dal 10% al 90% del valore massimo. Dalla 30,
possiamo concludere che l’oscilloscopio non può visualizzare impulsi con tempi di salita
più piccoli di t r .
20
Ammettendo un tempo di salita, t s , intrinseco all’impulso da diagnosticare, il
tempo di salita dell’impulso mostrato dall’oscilloscopio dipenderà sia da t s che da t r
mediante la seguente relazione:
t t = t s2 + t r2
(31)
t t è il tempo totale.
Oscilloscopio Digitale
L’oscilloscopio digitale ha superato molti limiti degli oscilloscopi TRC cambiando
radicalmente il concetto di misura. Esso infatti non sviluppa un sistema veloce di
visualizzazione del segnale, bensì un sistema veloce di acquisizione del segnale. Il passo
successivo, cioè quello della visualizzazione, può avvenire molto più lentamente ma
sempre in tempi molto più veloci della visualizzazione dell’occhio umano. Un secondo
vantaggio dell’oscilloscopio digitale è la sua capacità a trasformare un segnale in codice
numerico e quindi utilizzabile direttamente in programmi di analisi dati.
Come funziona un oscilloscopio digitale? Esso consta principalmente di un
amplificatore verticale, di un circuito di clock, di una memoria ecc. Del segnale da
diagnosticare si leggono solamente alcuni valori. Tutti d’altronde, sarebbe impossibile
leggerli tutti. In pratica con la presenza del clock si campiona il segnale leggendone il suo
valore ad intervalli di tempo regolari, sampling rate. Successivamente i valori registarti
vengono visualizzati dal display come singoli punti o uniti con una spezzata o con una
curva derivata da un’interpolazione denominata sinx/x.
Molte delle funzioni presenti nell’oscilloscopio TRC tipo il triggering, sono
presenti anche nell’oscilloscopio digitale. In esso la banda passante differisce a seconda
del metodo di campionamento. Il real time sampling campiona la forma d’onda con
intervalli uguali di tempo e la più alta frequenza leggibile senza attenuazione del segnale
è 1 4 la frequenza di campionamento. Poiché il segnale inizia a diminuire da questo
valore di frequenza in poi, allora il limite della banda passante è definito come:
f BW =
1
T 2.5
(31)
con 1 T la frequenza di campionamento.
Quando il segnale da diagnosticare è ripetitivo, allora si può utilizzare il
campionamento equivalent time. Questi metodo immagazzina in memoria molte tracce
del segnale catturare nelle stesse condizioni di trigger ed il risultato è che i
campionamento è sempre differente. Sovrapponendo tutte le tracce si ricostruisce il
segnale anche di frequenza più alta di quella di campionamento. Il limite, in questo caso
sta nella banda passante dell’amplificatore d’ingresso.
Per valutare il più piccolo tempo di salita di un segnale (valore del tempo dal 10%
al 90 % del suo valore massimo) in real time do dobbiamo immaginare come il segnale
viene catturato. In figura 23 sono riportati due esempi limite di tempo di salita. Se il
tempo di salita del segnale d’ingresso è molto piccolo, cioè immaginiamolo nullo, allora
21
esso può essere catturato tra due campionamenti o tra tre campionamenti. Il display
dell’oscilloscopio allora, mostrerà una forma d’onda con un tempo di salita di circa 0.8
volte l’intervallo di campionamento oppure 1.6 volte l’intervallo di campionamento in
funzione della posizione del trigger.
Figura 23. a: coincidenza tra un campionamento; b: coincidenza tra due campionamenti.
22
CODICE RESISTENZE
CODICE
Colore
Nero
Marrone
Rosso
Arancione
Giallo
Verde
Blu
Viola
Grigio
Bianco
Oro
Argento
Senza colore
Valore cifra
0
1
2
3
4
5
6
7
8
9
-
Multiplo
1
10
100
1000
10000
100000
1000000
10000000
0.1
0.01
-
Tolleranza
±1%
±2%
±3%
±4%
±5%
±10%
±20%
23
Denominazione
radiofrequenza
Frequenza
Sigla americana
Bassissime
3 – 30 KHz
Basse
30 – 300 KHz
Medie
300 – 3000 KHz
Alte
3 – 30 MHz
Altissime
30 – 300 MHz
Ultra alte
300 - 3000 MHz
Super alte
3 – 30 GHz
Estreme
Oltre 30 GHz
V.L.F.
Very low frequency
L.F.
Low frequency
M.F.
Medium frequency
H.F.
High frequency
V.H.F.
Very high frequency
U.H.F
Ultra high frequency
S.H.F
Super high frequency
E.H.F
Extremely high frequency
24