z
Bo
a Bo
zz
zz
a Bo
a
z
za B
za B
oz
oz
z
z
Bo
a
a Bo
z
z
- Appunti di Meccanica dei Solidi/Statica, dalle lezioni del prof. P. Podio-Guidugli, a.a. 2007/8 -
2
Sistemi di Forze e Coppie
Quella di forza va considerata una nozione primitiva. Non è necessario, né opportuno, dare una definizione fisica di forza. Invece, quando se ne costruisce il
modello matematico, è importante, anzi indispensabile, definirne con estrema
precisione gli elementi caratteristici. Questo faremo in questo capitolo, dove
considereremo anche un altro speciale costrutto, la coppia. Forze e coppie sono
vettori applicati, cioè, vettori cui competono specifici punti o rette di applicazione (nel caso delle forze) e specifici piani di applicazione, nel caso delle
coppie: in quanto vettori, forze e coppie si manipolano come abbiamo visto nel
capitolo precedente; in quanto titolari di punti, rette e piani di applicazione,
le forze e coppie di un sistema si compongono e decompongono secondo regole
non sempre immediate, la cui collezione costituisce l’oggetto principale della
Statica, cioè, della parte più antica e basilare della Meccanica; questo capitolo
contiene un’esposizione elementare delle principali tra quelle regole.
4 Nozione di forza
Una forza è un vettore applicato, cioè, un paio ordinato
(P, f ) ∈ E × VE ,
dove
- P è il punto di applicazione,
- vers f individua direzione e verso di applicazione,
- |f | è l’intensità.
Gli elementi che caratterizzano una forza sono il punto, la direzione e il verso
di applicazione, e l’intensità. Se |f | 6= 0, la retta di azione della forza (P, f ) è
−−⇀
il luogo r di tutti i punti P ′ ∈ E tali che P P ′ k f :
−−⇀
r = {P ′ ∈ E | P P ′ × f = 0}
z
Bo
a Bo
zz
zz
a Bo
a
z
za B
za B
oz
oz
z
z
Bo
a
a Bo
z
z
- Appunti di Meccanica dei Solidi/Statica, dalle lezioni del prof. P. Podio-Guidugli, a.a. 2007/8 -
24
2 Sistemi di Forze e Coppie
Figura 2.1.
(Fig. 2.1).
Osservazione. Ci sono precise motivazioni fisiche per introdurre due simili
ma distinte nozioni di forza come vettore applicato.
Se una forza f agisce su un corpo rigido, non è indispensabile conoscerne
il punto di applicazione: conoscere la retta di azione è sufficiente a predire gli
effetti statici e dinamici dell’azione di f . Se invece f agisce su un corpo deformabile, è importante conoscere il punto di applicazione, perché di regola al
variare di questo si ottengono effetti differenti. Consideriamo, infatti, la trave
deformabile rappresentata in figura, incastrata ad un’estremità e soggetta ad
Figura 2.2.
una forza f di trazione: la trave subirà un allungamento diverso a seconda
che il punto di applicazione sia in P o in Q. Un’osservazione analoga vale in
dinamica (Fig. 2.3): l’applicazione della forza f in P o in Q produce la stes-
h
Figura 2.3.
z
Bo
a Bo
zz
zz
a Bo
a
z
za B
za B
oz
oz
z
z
Bo
a
a Bo
z
z
- Appunti di Meccanica dei Solidi/Statica, dalle lezioni del prof. P. Podio-Guidugli, a.a. 2007/8 -
4 Nozione di forza
25
sa accelerazione in tutti i punti del carrello se questo è rigido, due campi di
accelerazione differenti se il carrello è deformabile.
Dunque, quando i corpi allo studio sono considerati deformabili, è opportuno che le forze che li sollecitano siano schematizzate come vettori applicati
ad un punto; quando i corpi sono riguardati come rigidi, basta immaginarli
soggetti a forze di cui si conosca la retta d’azione, schematizzate come vettori
applicati ad una retta, cioè, come vettori applicati ad un punto arbitario di
una retta assegnata (si veda la Sezione 8.4).
4.1 Momento di una forza rispetto ad un polo
Si definisce momento di una forza rispetto ad un punto Q, detto polo, il vettore
−−⇀
m(Q) = QP × f ;
vediamone le proprietà salienti.
(i) Il momento della forza (P, f ) dipende, in generale, dalla scelta del polo.
Più precisamente,
−−⇀
−−⇀ −−
−−⇀
⇀
m(Q′ ) = Q′ P × f = (Q′ Q + QP ) × f = Q′ Q × f + m(Q)
(Fig. 2.4).
Figura 2.4.
Vale dunque la seguente formula di trasporto:
−−⇀
m(Q′ ) = m(Q) + Q′ Q × f ,
in base alla quale è anche immediato constatare che il momento rimane
invariato se il polo viene spostato lungo una retta parallela alla retta
−−⇀
d’azione e, quindi, Q′ Q k f .
(ii) Spostando il punto di applicazione di una forza lungo la sua retta d’azione,
il suo momento rispetto al polo Q non varia. Infatti,
−−⇀′
−−⇀ −−⇀
−−
⇀
QP × f = (QP + P P ′ ) × f = QP × f
z
Bo
a Bo
zz
zz
a Bo
a
z
za B
za B
oz
oz
z
z
Bo
a
a Bo
z
z
- Appunti di Meccanica dei Solidi/Statica, dalle lezioni del prof. P. Podio-Guidugli, a.a. 2007/8 -
26
2 Sistemi di Forze e Coppie
Figura 2.5.
(si veda la Fig. 2.5). Come abbiamo già osservato, nella statica dei corpi
rigidi l’effetto di (P, f ) e (P ′ , f ) è lo stesso: le forze possono essere intese come vettori applicati ad una retta, nel senso che si tratta di vettori
applicati ad un punto arbitrario della loro retta d’azione.
(iii) Per definizione di prodotto vettoriale, il modulo del vettore momento è
pari al prodotto di |f | per la distanza d del polo dalla retta d’azione. Si
noti che il momento non è un vettore applicato.
5 Sistemi di forze
Un sistema di forze è un insieme costituito da un numero finito di forze:
{(Pi , fi ) |
i = 1, 2, . . . , N } .
Dato un sistema di forze, se ne definisce il risultante:
r :=
N
X
fi ;
i=1
e il momento risultante rispetto ad un polo Q scelto arbitrariamente in E:
m(Q) :=
N
X
i=1
mi (Q) =
N
X
−−⇀
QPi × fi .
(5.1)
i=1
Né il risultante né il momento risultante sono vettori applicati. È facile vedere
che il momento risultante varia al variare del polo nel modo seguente:
−−⇀
m(Q′ ) = m(Q) + Q′ Q × r .
(5.2)
z
Bo
a Bo
zz
zz
a Bo
a
z
za B
za B
oz
oz
z
z
Bo
a
a Bo
z
z
- Appunti di Meccanica dei Solidi/Statica, dalle lezioni del prof. P. Podio-Guidugli, a.a. 2007/8 -
5 Sistemi di forze
27
5.1 Asse centrale
Una conseguenza immediata della formula di trasporto (5.2) è che il momento
di un sistema di forze a risultante nullo non cambia con il polo. Per studiare il
caso generale (r 6= 0), introduciamo la nozione di decomposizione ortogonale
di un vettore rispetto ad una giacitura orientata.
Con riferimento alla Fig. 2.6, sia π n il piano di normale n, con |n| = 1. Si
Figura 2.6.
definisca:
v k = (v · n)n ,
v⊥ = v − vk ,
(5.3)
donde
v = vk + v⊥ ,
e si osservi che, poiché v k e v ⊥ sono mutuamente ortogonali,
v 2 = |v k |2 + |v ⊥ |2 .
(5.4)
Dato, allora, un sistema di forze con r 6= 0, eseguiamo una decomposizione ortogonale del suo momento risultante, scegliendo come giacitura quella
individuata da vers r . Avremo intanto, facendo uso di (5.1)-(5.3), che
m k (Q′ ) := (m(Q′ ) · vers r ) vers r
−−⇀
= [(m(Q) + Q′ Q × r ) · vers r )] vers r
= m k (Q) .
(5.5)
Quindi, al variare di Q′ in E, si ha:
m k (Q′ ) = cost.
(5.6)
Il modulo del momento risultante può dunque variare solo se varia m ⊥ (Q′ ),
cioè, il vettore:
z
Bo
a Bo
zz
zz
a Bo
a
z
za B
za B
oz
oz
z
z
Bo
a
a Bo
z
z
- Appunti di Meccanica dei Solidi/Statica, dalle lezioni del prof. P. Podio-Guidugli, a.a. 2007/8 -
28
2 Sistemi di Forze e Coppie
m ⊥ (Q′ ) := m(Q′ ) − m k (Q′ ) .
Dalle (5.4) e (5.6) segue che, qualunque sia la scelta del polo Q′ , si ha sempre:
|m(Q′ )| ≥ |m k (Q)|;
(5.7)
dunque, se m k (Q) 6= 0, non c’è alcun polo Q rispetto al quale il momento si
annulli. In effetti, tenendo conto di (5.4), si ha che
|m k (Q)| = min
|m(Q′ )|;
′
Q ∈E
e si trova che il luogo dei poli di minimo momento risultante è una retta
parallela al risultante, di equazione:
m(Q′ ) − (m(Q′ ) · vers r ) vers r = 0 .
(5.8)
Per dimostrare quest’ultima affermazione, scegliamo un riferimento di co−−⇀
modo (O ≡ Q; e1 , e2 , e3 ≡ vers r ) (di modo che, in particolare, QQ′ =
x1 e1 +x2 e2 +x3 vers r ; si veda la Fig. 2.7) e riscriviamo la formula di trasporto
Figura 2.7.
(5.2) nel modo seguente:
−−⇀
m(Q′ ) = m k (Q) + m ⊥ (Q) + Q′ Q × r ,
vale a dire,
e1
⊥
x1
m(Q′ ) = mk (Q)e3 + m⊥
(Q)e
+
m
(Q)e
−
1
2
1
2
0
e2
x2
0
⊥
= mk (Q)e3 + (m⊥
1 − rx2 )e1 + (m2 + rx1 )e2 .
Dunque, se Q′ è tale che
⊥
(m⊥
1 − rx2 )e1 + (m2 + rx1 )e2 = 0 ,
e3 x3 r z
Bo
a Bo
zz
zz
a Bo
a
z
za B
za B
oz
oz
z
z
Bo
a
a Bo
z
z
- Appunti di Meccanica dei Solidi/Statica, dalle lezioni del prof. P. Podio-Guidugli, a.a. 2007/8 -
5 Sistemi di forze
ovvero, se
m⊥
1 (Q) − rx2 = 0 ,
m⊥
2 (Q) + rx1 = 0
29
(5.9)
allora m(Q′ ) = m k (Q), condizione che, in virtù della disuguaglianza (5.7),
equivale alla realizzazione del minimo di m. Le equazioni (5.9) descrivono
due piani paralleli ad e3 (cioè, a r ), la cui intersezione è il luogo geometrico
cercato, l’asse centrale (Fig. 2.8). In definitiva, dato un sistema di forze, i poli
Figura 2.8.
che ne rendono minimo il momento risultante giacciono su una retta parallela
al risultante. Questa retta è determinata completamente dall’informazione
sul sistema racchiusa nei due suoi parametri globali, risultante e momento
risultante.
Esercizi
5.1. Trovare il momento risultante rispetto al polo O del sistema di forze
rappresentato in Fig. 2.9.
Soluzione. Qui basta eseguire un’applicazione diretta della definizione; si
trova:
−−⇀
−−⇀
−−⇀
m(O) = OP1 × f1 + OP2 × f2 + OP3 × f3
= h(e1 + e3 ) × (−f1 )e3 + h(e1 + e2 ) × (f2 )e3 +
h(e2 + e3 ) × (f3 )(e1 − e3 )
= hf1 e2 + hf2 (−e2 + e1 ) + hf3 (−e3 + e1 + e2 )
= h (f2 − f3 )e2 + (f1 − f2 + f3 )e2 − f3 e3 .
z
Bo
a Bo
zz
zz
a Bo
a
z
za B
za B
oz
oz
z
z
Bo
a
a Bo
z
z
- Appunti di Meccanica dei Solidi/Statica, dalle lezioni del prof. P. Podio-Guidugli, a.a. 2007/8 -
30
2 Sistemi di Forze e Coppie
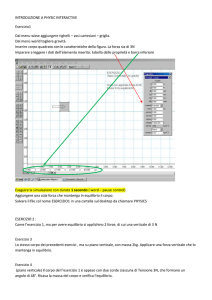
Figura 2.9.
5.2. Trovare l’asse centrale del sistema rappresentato in Fig. 2.10.
Figura 2.10.
Soluzione. I dati sono i seguenti:
P = h(1, 0, 1), Q = h(0, 1, 1), f = ϕe3 , g = ψe3 ;
nonostante in figura sia rappresentato un caso in cui ϕ, ψ < 0, possiamo
studiare il problema senza alcuna pregiudiziale attribuzione di segno a questi
parametri.
Il calcolo del risultante è semplice:
r = (φ + ψ)e3 .
Per calcolare il momento risultante, scegliamo un polo A ≡ (x1 , x2 , x3 )
arbitrario:
z
Bo
a Bo
zz
zz
a Bo
a
z
za B
za B
oz
oz
z
z
Bo
a
a Bo
z
z
- Appunti di Meccanica dei Solidi/Statica, dalle lezioni del prof. P. Podio-Guidugli, a.a. 2007/8 -
5 Sistemi di forze
31
−⇀
−⇀
m(A) = AP × f + AQ × g
= (h − x1 )e1 − x2 e2 + (h − x3 )e3 × ϕe3 +
− x1 e1 + (h − x2 )e2 + (h − x3 )e3 × ψe3
= ϕ(h − x1 ) − ψx1 e1 × e3 + − ϕx2 + ψ(h − x2 ) e2 × e3 .
Questo calcolo mostra che il momento risultante rispetto ad un polo arbitrario è un vettore perpendicolare al risultante. Dunque, la parte parallela del
momento risultante è nulla rispetto a qualunque polo e, di più, l’asse centrale
può essere determinato imponendo la condizione che m(A) sia nullo:
ϕ(h − x1 ) − ψx1 = 0 &
− ϕx2 + ψ(h − x2 ) = 0,
che individua l’asse centrale come la retta intersezione dei piani
x1 = h
ϕ
,
ϕ+ψ
x2 = h
ψ
.
ϕ+ψ
(5.10)
Sommando queste equazioni membro a membro, si vede che questa retta appartiene al piano x2 + x1 − h = 0 , cui appartengono anche le forze f e g (Fig.
2.11). Al variare dei valori di ϕ e ψ si possono avere i seguenti casi: per ϕ e ψ
Figura 2.11.
di uguale segno, l’asse centrale passa per un punto interno al segmento P Q;
se i segni sono discordi, l’asse centrale passa per un punto esterno al segmento
P Q, dalla parte della forza di intensità maggiore.
Osservazione. Alternativamente, l’asse centrale può essere determinato richiedendo che sia
|m(A)|2 = min ,
dove
z
Bo
a Bo
zz
zz
a Bo
a
z
za B
za B
oz
oz
z
z
Bo
a
a Bo
z
z
- Appunti di Meccanica dei Solidi/Statica, dalle lezioni del prof. P. Podio-Guidugli, a.a. 2007/8 -
32
2 Sistemi di Forze e Coppie
|m(A)|2 = [ϕ(h − x1 ) − ψx1 ]2 + [−ϕx2 + ψ(h − x2 )]2 =: f (x1 , x2 ).
Le condizioni di minimo sono:
∂f (x1 , x2 )
= 2(ϕ(h − x1 ) − ψx1 )(−ϕ − ψ) = 0,
∂x1
∂f (x1 , x2 )
= 2(−ψx2 + ψ(h − x2 )(−ϕ − ψ) = 0,
∂x2
e implicano proprio le relazioni (5.10); si trova poi che min f (x1 , x2 ) = 0.
5.3. Si considerino due rette sghembe r e s e una forza (P, f ) come in figura.
Figura 2.12.
Si dimostri che, qualunque sia Q ∈ s,
(i) m(Q) · r = cost., r := vers r;
(ii) m(Q) · s = cost., s := vers s.
Soluzione. Basta ricordare la formula di trasporto:
−−⇀
m(Q′ ) = m(Q) + Q′ Q × f
e osservare che
−−′⇀
Q Q k s,
f k r,
per concludere che
m(Q′ ) − m(Q) · s = m(Q′ ) − m(Q) · s = 0 .
5.4. Si consideri il sistema di forze S = {(Pi , fi ), i = 1, 2, 3}, con
P1 ≡ (0, 0, 0), P2 ≡ l(1, 0, 0), P3 ≡ l(0, 1, 0);
f1 = f (e1 + e2 + e3 ),
f2 = f e1 ,
f3 = f e2 ,
e se ne determini l’asse centrale.
Soluzione. Poiché le rette d’azione delle forze si intersecano nell’origine, il
sistema S ha risultante r = f (2e1 +2e2 +e3 ) e momento risultante m(O) = 0.
L’asse centrale ha quindi la seguente equazione parametrica:
P(α) = O + αr ,
α ∈ R.
z
Bo
a Bo
zz
zz
a Bo
a
z
za B
za B
oz
oz
z
z
Bo
a
a Bo
z
z
- Appunti di Meccanica dei Solidi/Statica, dalle lezioni del prof. P. Podio-Guidugli, a.a. 2007/8 -
5 Sistemi di forze
33
5.5. Di un sistema di forze siano noti risultante r e momento risultante m(Q)
rispetto al polo Q. Si determini l’equazione parametrica dell’asse centrale.
Soluzione. Dalla formula di trasporto:
−−
⇀
m(P ) = m(Q) + P Q × r ,
qualunque sia P ; d’altra parte, se P sta sull’asse centrale, m(P ) dev’essere
parallelo al risultante:
m(P ) × r = 0 ;
quindi,
−−⇀
0 = m(Q) × r + (P Q × r ) × r .
Da quest’ultima relazione, con l’uso dell’identità vettoriale
(a × b) × b = (a · b)b − |b|2 a, 1
segue
−−⇀
−−
⇀
|r |2 QP = r × m(Q) + (QP · r )r .
(5.11)
Non è difficile disgregare l’informazione contenuta in questa equazione. Sia P0
il punto sull’asse centrale di minima distanza tra l’asse medesimo e Q; allora,
−−⇀ −−⇀ −−⇀ −−⇀
QP = QP0 + P0 P = QP0 + αr ,
−−⇀
con QP0 · r = 0, α ∈ R.
Segue subito da (5.11) e (5.12) che
−−⇀
|r |2 QP0 = r × m(Q),
−−⇀
P0 P = α vers r .
Dunque,
P (α) = Q + |r |−1 vers r × m(Q) + α vers r , α ∈ R,
è l’equazione parametrica cercata.
5.6. Dato il sistema di forze S = {(Pi , fi ), i = 1 . . . 3} con
P1 ≡ (0, 0, 0), P2 ≡ l(1, 0, 0), P3 ≡ l(0, 1, 0);
f1 = f (e1 + e2 + e3 ), f2 = f e1 , f3 = f e2 ,
si determinino:
- il risultante r ;
- il momento risultante rispetto al polo R ≡ h(0, 0, 1);
- il luogo dei punti P tali che m(P ) = 0;
1
Questa identità è un caso particolare di questa:
(a × b) × c = (a · c)b − (b · c)a,
che vale qualunque siano i vettori a, b e c.
(5.12)
z
Bo
a Bo
zz
zz
a Bo
a
z
za B
za B
oz
oz
z
z
Bo
a
a Bo
z
z
- Appunti di Meccanica dei Solidi/Statica, dalle lezioni del prof. P. Podio-Guidugli, a.a. 2007/8 -
34
2 Sistemi di Forze e Coppie
- l’asse centrale.
Soluzione. Notiamo che le rette d’azione delle tre forze passano per l’origine;
dunque, il sistema dato è equipollente al sistema R = {(O, f1 ), (O, f2 ), (O, f3 )},
che ha momento risultante m(O) = 0 e risultante r = f (2e1 + 2e2 + e3 ). Il
momento risultante rispetto al polo R si trova facendo uso della formula di
trasporto:
−−
⇀
m(R) = m(O) + RO × r = (−he3 ) × f (2e1 + 2e2 + e3 ) = 2f h(e1 − e2 ).
Poichè nell’origine il momento risultante è nullo, ivi è attinto il minimo (del
modulo) del momento risultante; poiché r 6= 0, questo stesso minimo è attinto
su tutti e soli i punti dell’asse centrale. Pertanto, il luogo dei punti ove il
momento risultante si annulla – l’asse centrale – è una retta per l’origine
parallela al risultante.
6 Nozione di coppia
Per motivare la nozione matematica di coppia, l’altro tipo di vettore applicato
ad avere un ruolo centrale in Statica, cominciamo considerando una coppia di
forze, cioè, un sistema consistente di due forze parallele di identico modulo e
di verso contrario:
{(P, f ), (Q, −f )} .
La Fig. 2.13 rappresenta questa coppia di forze nel suo piano d’azione, che
−−⇀
P, Q e f individuano, cioè, il piano di normale vers(QP × f ). Dato che il
Figura 2.13.
risultante di un sistema di forze siffatto è nullo, il suo momento risultante è
costante al variare del polo. Notiamo che il momento di (P, f ) rispetto a Q è
uguale al momento di (Q, −f ) rispetto a P :
−−
⇀
−
−⇀
m(Q) = QP × f = P Q × (−f ) = m(P ) .
−−⇀
Dunque, il momento risultante della coppia di forze in esame è pari a QP × f
rispetto a qualunque polo; il suo braccio è per definizione la distanza tra le
rette per P e Q parallele a f ; come mostra la figura,
z
Bo
a Bo
zz
zz
a Bo
a
z
za B
za B
oz
oz
z
z
Bo
a
a Bo
z
z
- Appunti di Meccanica dei Solidi/Statica, dalle lezioni del prof. P. Podio-Guidugli, a.a. 2007/8 -
6 Nozione di coppia
35
−−⇀
b = |QP × vers f | .
Osservazione. Come succede in generale per i sistemi di forze, gli effetti
dell’azione di una coppia di forze sui corpi rigidi e sui corpi deformabili sono
di regola differenti. Consideriamo, ad esempio, il corpo cilindrico rappresentato
in Fig. 2.14.
Figura 2.14.
Per effetto della coppia di forze applicate, il cilindro è soggetto ad un’azione
torcente, i cui effetti sono diversi a seconda della distanza dal piano d’incastro
del piano d’azione della coppia se il corpo è deformabile, sono indipendenti da
questa distanza se il corpo è rigido. La stessa differenza o identità di effetti a
seconda della natura deformabile o indeformabile del corpo ci si attende per
coppie di forze ad azione flettente come le coppie di identico braccio in Fig.
2.15.
k
Figura 2.15.
Come ulteriore passo verso una motivazione convincente della nozione matematica di coppia, che presto daremo, riprendiamo in esame il corpo cilindrico
di Fig. 2.14 e pensiamone la base superiore assoggettata vuoi alle coppie di
forze rappresentate in Fig. 2.16 vuoi a quelle in Fig. 2.17; quindi, consideriamo
z
Bo
a Bo
zz
zz
a Bo
a
z
za B
za B
oz
oz
z
z
Bo
a
a Bo
z
z
- Appunti di Meccanica dei Solidi/Statica, dalle lezioni del prof. P. Podio-Guidugli, a.a. 2007/8 -
36
2 Sistemi di Forze e Coppie
il corpo inflesso di Fig. 2.15 sotto l’azione delle coppie di forze rappresentate
in Fig. 2.18.
(i) Qui la base superiore del cilindro è
assoggettata, di volta in volta, alle
coppie di forze:
{(P, f ), (Q, −f )};
{(P1 , 2f ), (Q1 , −2f )},
−−−⇀
−−
⇀
con |P1 Q1 | = 21 |P Q|;
2
2
{(P2 , 3 f ), (Q2 , − 3 f )},
−−−⇀
−−
⇀
con |P2 Q2 | = 23 |P Q|.
Figura 2.16.
(ii) Qui la base superiore del cilindro
è assoggettata, alternativamente, alla
coppia di forze {(P, f ), (Q, −f )} o alla
coppia di forze {(R, g ), (S, −g )}, tale
−⇀
−−⇀
che SR × g = QP × f .
Figura 2.17.
(iii) Qui il corpo è assoggettato a
coppie di forze flettenti di identico
momento risultante.
Figura 2.18.
Le coppie di forze considerate in ciascuno di questi esempi hanno identico
momento risultante e identico piano d’azione. Ebbene, un importante aspetto
z
Bo
a Bo
zz
zz
a Bo
a
z
za B
za B
oz
oz
z
z
Bo
a
a Bo
z
z
- Appunti di Meccanica dei Solidi/Statica, dalle lezioni del prof. P. Podio-Guidugli, a.a. 2007/8 -
6 Nozione di coppia
37
definitorio comune ai modelli matematici dei corpi rigidi e di certe classi di
corpi a deformabilità limitata e semplificata – come le travi, che studieremo
più avanti, il cui asse si può deformare ma non la sezione trasversale (Fig 2.19)
– è l’assunzione che coppie di forze di piano d’azione e momento risultante
identici abbiano identici effetti statici e dinamici.
Figura 2.19.
L’oggetto matematico che descrive tutte le coppie di forze che hanno in
comune momento risultante e piano d’azione – oggetto del quale ciascuna di
quelle coppie di forze è una realizzazione – è la coppia, un vettore applicato
(Q, c) ∈ E × VE ,
i cui elementi caratteristici sono:
- il piano di applicazione, cioè, il piano orientato passante per Q e perpendicolare a c;
- il verso, individuato dall’orientazione del piano di applicazione;
- l’intensità, pari a |c|.
Figura 2.20.
Per distinguere graficamente le coppie dalle forze, rappresenteremo le prime, a seconda dei casi, con un vettore con doppia punta di freccia perpendicolare al piano d’azione o con una freccia “incurvata” giacente nel piano
d’azione.
z
Bo
a Bo
zz
zz
a Bo
a
z
za B
za B
oz
oz
z
z
Bo
a
a Bo
z
z
- Appunti di Meccanica dei Solidi/Statica, dalle lezioni del prof. P. Podio-Guidugli, a.a. 2007/8 -
38
2 Sistemi di Forze e Coppie
7 Sistemi di forze e coppie
Un sistema di forze e coppie è un insieme costituito da un numero finito di
elementi distinti in due categorie (forze e coppie, appunto), il cui aspetto
generale è il seguente:
{(Pi , fi ) ∈ E × VE | i = 1, 2, . . . , N ;
(Qj , cj ) ∈ E × VE | j = 1, 2, M } .
Anche di un sistema di forze e coppie si definiscono risultante e momento
risultante rispetto ad un polo Q:
r =
N
X
fi ,
(7.1)
i=1
m(Q) =
N
M
X
X
−−⇀
QPi × fi +
cj .
i=1
(7.2)
j=1
Per trovare come cambia il momento risultante al cambiare del polo, ricordando che le coppie non si accorgono del cambiamento, possiamo scrivere:
m(Q′ ) =
N
M
X
X
−−⇀
−−⇀
QPi × fi + Q′ Q × r +
cj ,
i=1
e, cioè, di nuovo:
j=1
−−⇀
m(Q′ ) = m(Q) + Q′ Q × r .
Osservazione. Per un sistema di forze e coppie, la nozione di asse centrale
è identica a quella data per un sistema di sole forze.
7.1 Riduzione di una forza ad un punto assegnato
Data una forza (P, f ), “ridurla” ad un arbitrario punto Q significa trovare un
sistema costituito da una forza (Q, f ′ ) e da una coppia (Q, c), che rispetti le
condizioni:
−−⇀
−−⇀
f = f ′ , P0 P × f = P0 Q × f ′ + c ,
per ogni scelta del punto P0 ∈ E. È facile dimostrare che deve essere
f′ =f ,
−−
⇀
c = QP × f
(Fig. 2.21). Un sistema siffatto è equipollente 2 alla forza data. Più in generale,
si dicono equipollenti due sistemi di forze e coppie che abbiano identici parametri globali, cioè, stesso risultante e stesso momento risultante (rispetto ad
un polo e, quindi, rispetto a qualunque polo).
2
Dal verbo latino póllere = avere la capacità di.
z
Bo
a Bo
zz
zz
a Bo
a
z
za B
za B
oz
oz
z
z
Bo
a
a Bo
z
z
- Appunti di Meccanica dei Solidi/Statica, dalle lezioni del prof. P. Podio-Guidugli, a.a. 2007/8 -
7 Sistemi di forze e coppie
39
Figura 2.21.
Osservazioni. 1. L’operazione di riduzione viene anche detta operazione di
trasporto parallelo (della forza f da P a Q; la coppia c fornisce il momento
di trasporto.
2. Per un’applicazione dell’idea di riduzione di una forza ad un punto, si veda
la Fig. 2.22.
Figura 2.22.
Se il corpo in figura è rigido, il sistema costituito dalla forza f e dalla coppia
c applicate in Q (si noti la convenzione della “freccia incurvata”) ha gli stessi
effetti della forza f applicata in P . Se il corpo è pensato come una trave ad
asse indeformabile, il sistema in Q ha gli stessi effetti della forza in P per tutti
i punti dell’asse da R a Q.
3. Una modesta generalizzazione del procedimento di riduzione di una forza
ad un punto assegnato ne consente l’applicazione ad un qualunque sistema
di forze e coppie {(Pi , fi ), i = 1, 2, . . . , N ; (Qj , cj ), j = 1, 2, . . . , M }, la cui
riduzione a Q ∈ E consiste nel trovare un sistema {(Q, f ); (Q, c)}, tale che
z
Bo
a Bo
zz
zz
a Bo
a
z
za B
za B
oz
oz
z
z
Bo
a
a Bo
z
z
- Appunti di Meccanica dei Solidi/Statica, dalle lezioni del prof. P. Podio-Guidugli, a.a. 2007/8 -
40
2 Sistemi di Forze e Coppie
f =r =
N
X
fi ,
i=1
c = m(Q) =
N
M
X
X
−−⇀
QPi × fi +
cj ,
i=1
j=1
dove r e m(Q) sono il risultante e il momento risultante rispetto al polo Q
del sistema di forze e coppie assegnato.
7.2 Decomposizione di una forza secondo direzioni assegnate
Consideriamo ora il problema della decomposizione di una forza data in un
sistema di forze aventi retta d’azione e punti di applicazione assegnati. Delle
forze incognite, si cercano intensità e verso, in modo da ottenere un sistema
equipollente alla forza data. Formalmente, i dati sono:
(i) la forza (P, f );
(ii) le K rette d’azione, ciascuna individuata dal suo versore ni e da un suo
punto Pi ,
(Pi , ni ) con |ni | = 1, (i = 1, 2, . . . , k).
Si vuole trovare un sistema di forze
{(Pi , fi ), i = 1, 2, . . . , K}, con fi = xi ni , 3
determinando le K incognite xi in modo che siano soddisfatte le condizioni di
equipollenza:
K
K
X
X
fi =
xi ni = f ,
i=1
i=1
K
K
X
X
−−⇀
−−⇀
−−
⇀
QPi × fi =
xi QPi × ni = QP × f .
i=1
(7.3)
i=1
Osservazione. Due sistemi di forze e coppie equipollenti hanno lo stesso
momento risultante rispetto a qualunque polo. Infatti, se
r = r ′ & m(Q) = m ′ (Q),
allora,
−−
⇀
−
−
⇀
m(R) = m(Q) + RQ × r = m ′ (Q) + RQ × r ′ = m ′ (R) .
Dunque, quando si scrive la seconda delle condizioni di equipollenza (7.3),
ogni scelta di Q è lecita.
Per proiezione delle due equazioni vettoriali (7.3) sugli assi coordinati e1 ,
e2 , e3 , si ricava un sistema algebrico di sei equazioni lineari nelle K incognite
xi . In particolare, proiettando la prima equazione, si ottiene:
3
Qui non c’è somma rispetto all’indice i.
z
Bo
a Bo
zz
zz
a Bo
a
z
za B
za B
oz
oz
z
z
Bo
a
a Bo
z
z
- Appunti di Meccanica dei Solidi/Statica, dalle lezioni del prof. P. Podio-Guidugli, a.a. 2007/8 -
7 Sistemi di forze e coppie
K
X
i=1
41
xi (ni · ej ) = f · ej ;
quindi, ponendo
Nji = ej · ni ,
possiamo scrivere
Nji xi = fj
fj = ej · f ,
(j = 1, 2, 3) .
Analogamente, proiettando la seconda equazione, otteniamo:
K
X
−−⇀
−−⇀
(QPi × xi ni ) · ej = QP × f · ej
i=1
e, ponendo
−−⇀
Mji = ej · QPi × ni (i non sommato),
mj = ej · m ,
possiamo scrivere
Mji xi = mj
(j = 1, 2, 3) .
In conclusione, il sistema di equazioni scalari da risolvere è il seguente:
Nji xi = fj ,
Mji xi = mj .
In notazione matriciale, questo sistema di equazioni ha l’aspetto:
f1
x1
N11 N12 . . . N1K
N21 N22 . . . N2K x2 f2
N31 N32 . . . N3K . f3
;
=
M11 M12 . . . M1K . m1
m2
.
M21 M22 . . . M2K
m3
xK
M31 M32 . . . M3K
la matrice 6 × K è la matrice M del sistema, mentre i due vettori colonna
6 × 1 racchiudono, rispettivamente, le incognite e i termini noti (≡ i dati che
individuano la decomposizione cercata); aggiungendo alla matrice del sistema
il vettore dei termini noti come ultimo vettore colonna si ottiene la matrice
completa M C (Fig. 2.23).
Figura 2.23.
z
Bo
a Bo
zz
zz
a Bo
a
z
za B
za B
oz
oz
z
z
Bo
a
a Bo
z
z
- Appunti di Meccanica dei Solidi/Statica, dalle lezioni del prof. P. Podio-Guidugli, a.a. 2007/8 -
42
2 Sistemi di Forze e Coppie
Per decidere se un sistema siffatto ammette soluzioni e se, eventualmente, la
soluzione è unica, conviene richiamare il
Teorema di Rouché-Capelli. Dato un sistema algebrico lineare di L equazioni in K incognite, si calcolino cM , la caratteristica della matrice del sistema,
e cMC , la caratteristica della matrice completa.4 Allora,
(i) se cM < cMC ,
(ii) se cM = cMC ,
- se cM = cMC
- se cM = cMC
∄ soluzione;
∃ (almeno una) soluzione; inoltre,
= K, la soluzione esistente è unica;
< K, esistono ∞K−cM soluzioni.
Esercizi
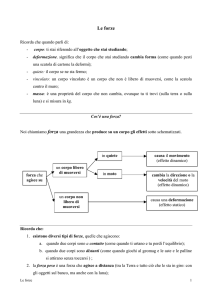
7.1. Si consideri la trave in figura, rigida e vincolata al suolo da tre carrelli.
Si decomponga la forza cui la trave è soggetta in un sistema di tre forze,
applicate nei punti dove si trovano i carrelli e perpendicolari alla via di corsa
di questi.5
Figura 2.24.
Soluzione. Questo esercizio propone un esempio di applicazione del Teorema
di Rouché-Capelli. I dati sono:
−−
⇀
OP = αle1 , α ∈ [0, 1]; f = f1 e1 +f2 e2 ; P1 = O, P2 = O+le1 , P3 = O+2le1 .
4
5
La caratteristica di una matrice è il numero intero pari al massimo ordine dei suoi
minori non nulli; per definizione, cM ≤ cM C .
Anticipiamo qui che, per una trave piana come quella che qui consideriamo, il
carrello è un vincolo di posizione che impedisce la traslazione dell’asse della trave
in direzione perpendicolare alla retta che ne individua la via di corsa, consentendone invece la traslazione in direzione parallela e consentendo altresı̀ la rotazione
della sezione trasversale attorno alla cerniera; in corrispondenza di ogni carrello, a
seguito dell’applicazione di carichi sulla trave, può prodursi una forza di reazione
che – se non è presente attrito, come di solito si suppone per semplicità – passa
per la cerniera ed è perpendicolare alla via di corsa.
z
Bo
a Bo
zz
zz
a Bo
a
z
za B
za B
oz
oz
z
z
Bo
a
a Bo
z
z
- Appunti di Meccanica dei Solidi/Statica, dalle lezioni del prof. P. Podio-Guidugli, a.a. 2007/8 -
7 Sistemi di forze e coppie
43
Le incognite sono le variabili reali xi che determinano le forze cercate:
fi = xi e2 (i = 1, 2, 3);
possiamo interpretare fi dicendo che −fi = ri , la reazione vincolare esplicata dall’i-esimo carrello. Le due equazioni vettoriali del problema sono una
specializzazione delle condizioni di equipollenza (7.3):
3
X
fi = f
i=1
3
X
i=1
−−⇀
−−⇀
OPi × fi = OP × f
3
X
(
xi )e2 = f1 e1 + f2 e2 ;
⇔
⇔
i=1
3
X
(
i=1
−−⇀
xi OPi ) × e2 = αle1 × (f1 e1 + f2 e2 ).
Dunque, si deve risolvere il seguente sistema
equazioni ed incognite:
=
0+0+0
x1 + x2 + x3 =
0 + lx2 + 2lx3 =
La matrice del sistema e
0
1
0
quella completa
0 0
0
1 1 , 1
l 2l
0
algebrico lineare di L = K = 3
f1 ,
f2 ,
αlf2 .
sono rispettivamente:
0 0
f1
1 1
f2 ,
l 2l αlf2
e hanno caratteristiche cM = 2 e cMC = 3. Poiché cM < cMC , non vi sono
soluzioni.
Osservazione. Se variamo le condizioni di carico, scegliendo una forza applicata f verticale (f1 = 0), avremo: cM = cMC = 2. In questo caso la soluzione
esiste, ma non è unica, perché cM = cMC < K: visto che K − cMC = 1,
esistono ∞1 soluzioni.
7.2. Si decomponga la forza applicata secondo le direzioni delle aste del
tripode in figura.
Figura 2.25.
z
Bo
a Bo
zz
zz
a Bo
a
z
za B
za B
oz
oz
z
z
Bo
a
a Bo
z
z
- Appunti di Meccanica dei Solidi/Statica, dalle lezioni del prof. P. Podio-Guidugli, a.a. 2007/8 -
44
2 Sistemi di Forze e Coppie
Soluzione. Nel caso proposto in questo esercizio l’unica condizione di equipollenza rilevante è la prima delle (7.3); infatti, se si sceglie come polo il punto
di applicazione della forza assegnata, l’altra condizione è garantita. La maggiore difficoltà da superare consiste nel rappresentare efficacemente i dati del
problema: scelto il riferimento cartesiano in figura, si vede che
(i) la forza (P, f ) è applicata in P ≡ (0, 0, 1) e f = ϕ(e1 + e2 − e3 ), ϕ ∈ R;
(ii) le rette su cui giacciono le aste hanno direzioni individuate dai vettori
n1 = e1 − e3 ; n2 = e2 − e3 , n3 = e3 .
Perciò, la condizione di equipollenza prende l’aspetto seguente:
3
X
i=1
fi = f
⇔
x1 (e1 − e3 ) + x2 (e2 − e3 ) + x3 e3 = ϕ(e1 + e2 − e3 ),
da cui, per proiezione sugli assi coordinati,
1
x1 + 0 + 0 = ϕ
0
0 + x2 + 0 = ϕ
,
−x1 − x2 + x3 = −ϕ
−1
si ottiene:
0 0
x1
ϕ
1 0 x2 = ϕ .
−1 1
x3
−ϕ
Poiché la caratteristica della matrice del sistema è uguale alla caratteristica
della matrice completa e al numero di incognite, c’è un’unica soluzione, questa:
x1 = ϕ,
x2 = ϕ,
x3 = 3ϕ.
7.3. Nel riferimento cartesiano {O; x1 , x2 , x3 }, sia P ≡ l(1, 1, 1), f =
f (e1 + e2 + e3 ) (l, f > 0). Si decomponga la forza (P, f ) nel sistema di forze
{(Pi , yi ni ), i = 1, . . . , 5}, con
P1 ≡ (0, 0, 0), P2 ≡ l(1, 0, 0), P3 ≡ l(0, 1, 0),
n1 = n2 = n3 = e3 , n4 = e1 , n5 = e2 .
P4 = P5 ≡ l(0, 0, 1),
Soluzione. Ognuno degli eventuali sistemi di forze che risolvono il problema
dev’essere equipollente alla forza assegnata, quindi corrispondere ad una lista
{yi , i = 1, . . . , 5} tale da soddisfare le condizioni:
X
X −−
⇀
−−⇀
y i ni = f ,
yi OP i × ni = OP × f .
i
i
Proiettando lungo le direzioni coordinate, visto che l 6= 0, si ottiene il seguente
sistema di equazioni scalari:
y1 + y2 + y3 = f,
y4 = f,
y5 = f,
y
−
y
2
4 = 0,
y3 − y5 = 0,
z
Bo
a Bo
zz
zz
a Bo
a
z
za B
za B
oz
oz
z
z
Bo
a
a Bo
z
z
- Appunti di Meccanica dei Solidi/Statica, dalle lezioni del prof. P. Podio-Guidugli, a.a. 2007/8 -
7 Sistemi di forze e coppie
45
che, scritto, in forma matriciale diventa:
Ay = b ,
con
11
0 0
A≡
0 0
0 1
00
1 0 0
0 1 0
0 0 1
,
0 −1 0
1 0 −1
y1
y2
y ≡
y3 ,
y4
y5
1
1
b ≡f
1.
0
0
La matrice A è quadrata ed ha rango massimo, dunque esiste un’unica
soluzione:
T
y ≡ f − 1, 1, 1, 1, 1 .
7.4. Decomporre la forza (P, f ) nelle forze (A, fa ), (B, fb ) e (C, fc ), applicate
nei punti indicati in figura delle loro rispettive rette d’azione ra , rb e rc .
Figura 2.26.
Soluzione. La prima condizione di equipollenza si scrive:
f =
3
X
i=1
fi ⇒ −f e3 = fa e3 + fb e2 + fc (e1 + e2 + e3 )
ed equivale alle tre equazioni scalari:
fc = 0 ,
fb + fc = 0 ,
fa + fc = −f ,
dalle quali si ricava:
fc = 0 ,
fb = 0 ,
fa = −f .
z
Bo
a Bo
zz
zz
a Bo
a
z
za B
za B
oz
oz
z
z
Bo
a
a Bo
z
z
- Appunti di Meccanica dei Solidi/Statica, dalle lezioni del prof. P. Podio-Guidugli, a.a. 2007/8 -
46
2 Sistemi di Forze e Coppie
A questo punto, occorre controllare che anche la seconda condizione di equipollenza sia soddisfatta, rispetto ad un polo e, quindi, a tutti. Scegliendo il
punto P come polo, troviamo:
−−
⇀
−⇀
−−⇀
−−
⇀
−⇀
0 = P P × f = P A × fa + P B × fb + P C × fc = −f P A × e3
⇒
f = 0.
Concludiamo che il problema non ammette soluzioni.
8 Sistemi piani di forze e coppie
Un sistema di forze e coppie
{(Pi , fi ), i = 1, 2, . . . , N ; (Qj , cj ), j = 1, 2, . . . , M }
è piano se si possono individuare un punto O ∈ E e un vettore e ∈ VE per i
quali risulti:
−−⇀
−−⇀
(i) OPi · e = 0, OQj · e = 0,
(ii) fi · e = 0, cj × e = 0,
per tutte le determinazioni degli indici i e j (Fig. 2.27).
Figura 2.27.
8.1 Asse centrale
Segue subito dalla definizione che, per un sistema piano,
(i) r · e = 0, m(Q) × e = 0, qualunque sia la scelta del punto Q nel piano
−−⇀
del sistema (cioè, purché risulti OQ · e = 0); inoltre,
(ii) l’asse centrale è una retta (parallela al risultante) che appartiene al piano
del sistema.6
6
Si ricordi che l’asse centrale è ben definito solo quando r 6= 0.
z
Bo
a Bo
zz
zz
a Bo
a
z
za B
za B
oz
oz
z
z
Bo
a
a Bo
z
z
- Appunti di Meccanica dei Solidi/Statica, dalle lezioni del prof. P. Podio-Guidugli, a.a. 2007/8 -
8 Sistemi piani di forze e coppie
47
Dimostriamo che questa seconda affermazione è vera. Per la proprietà (i), se
Q appartiene al piano del sistema, allora m(Q) è parallelo a e, quindi perpendicolare al risultante; dunque, ricordando la definizione (5.5) e la proprietà
generale (5.6), m k (Q) è nullo rispetto a qualsiasi punto di E. Ne segue che,
per un sistema piano, l’equazione (5.8) dell’asse centrale si riduce a:
m(Q′ ) = 0 .
Allora, se Q è nel piano del sistema, la formula di trasporto porge:
−−⇀
m(Q′ ) = m(Q) + Q′ Q × r = 0 ,
−−⇀
dove gli addendi m(Q) e Q′ Q × r sono necessariamente paralleli tra loro e a
−−⇀
e. Ma, visto che r ⊥ e, il prodotto vettore Q′ Q × r può essere parallelo a e
′
′
solo se Q – e, quindi, la retta per Q e Q – giacciono nel piano del sistema.
In conclusione, l’asse centrale di un sistema piano di forze e coppie è la retta
nel piano del sistema parallela al risultante e luogo dei poli rispetto ai quali il
momento risultante è nullo (Fig. 2.28).
Figura 2.28.
8.2 Sistemi nulli
Un sistema piano di forze e coppie si dice nullo se
r =0
&
m(Q) = 0,
per almeno un punto Q nel piano del sistema. Il più semplice sistema nullo è
una coppia di forze di braccio nullo, come quella mostrata al centro della Fig.
2.29, che contiene anche due esempi di sistemi piani che nulli non sono.
z
Bo
a Bo
zz
zz
a Bo
a
z
za B
za B
oz
oz
z
z
Bo
a
a Bo
z
z
- Appunti di Meccanica dei Solidi/Statica, dalle lezioni del prof. P. Podio-Guidugli, a.a. 2007/8 -
48
2 Sistemi di Forze e Coppie
Figura 2.29.
8.3 Problemi di decomposizione
Sono i problemi in cui si richiede di decomporre una forza (P, f ) in un sistema
di forze avente rette d’azione e punti di applicazione assegnati in uno stesso
piano per P di normale e, cui la forza appartiene. Allora, le assegnazioni di
dati ammissibili nel caso del problema generale visto nella Sottosezione 7.2
vengono cosı̀ ristrette:
−−⇀
Pi : P Pi · e = 0 ,
ni : ni · e = 0 ,
per ogni possibile determinazione dell’indice corrente i. Di conseguenza,
P
(i) l’equazione
fi = f è sempre tale che
X
e·
fi = e · f = 0 ,
dunque dà luogo
a due sole equazioni scalari;
P −−⇀
−−
⇀
(ii) l’equazione
QPi × fi = QP × f è sempre tale che
X −−⇀
−−
⇀
e ×(
QPi × fi ) = e × (QP × f ) = 0 ,
dunque dà luogo ad una sola equazione scalare.
Quindi, per risolvere un problema piano di decomposizione, si hanno in
generale a disposizione tre equazioni scalari, e non sei come nei problemi
spaziali.
Esercizi
Negli esercizi che seguono il piano al quale appartengono le forze e nel quale
agiscono le coppie viene equipaggiato con un riferimento cartesiano ortogonale
{O; e1 , e2 }.
z
Bo
a Bo
zz
zz
a Bo
a
z
za B
za B
oz
oz
z
z
Bo
a
a Bo
z
z
- Appunti di Meccanica dei Solidi/Statica, dalle lezioni del prof. P. Podio-Guidugli, a.a. 2007/8 -
8 Sistemi piani di forze e coppie
49
8.1. Decomporre la forza (P, f ) in un sistema consistente in due forze per
O aventi le direzioni delle rette r1 , r2 e una forza per Q nella direzione della
retta r3 , appartenente al piano delle prime due (Fig. 2.30).
Figura 2.30.
Soluzione. I dati sono:
f = βe2 (β 6= 0) ;
Q = O + γ(e1 + e2 ) , P = O + α(e1 + e2 ) ;
r1 ∼ e1 , r2 ∼ e2 , r3 ∼ (−e1 + e2 ) .
Le condizioni di equipollenza sono:
P
x1 e1 + x2 e2 + x3 (−e1 + e2 ) = βe2 ( fi = f ) ,
−−⇀
−−⇀
γ(e1 + e2 ) × x3 (−e1 + e2 ) = α(e1 + e2 ) × (βe2 ) (OQ × f3 = OP × f ) .
Il sistema di equazioni scalari corrispondente risulta essere:
x1 − x3 = 0,
x2 + x3 = β,
2γx3 = αβ;
in notazione matriciale,
1 0
0 1
0 0
−1
x1
0
1 x2 = β ;
2γ
x3
αβ
studiamone la soluzione applicando il teorema di Rouché-Capelli:
- se γ 6= 0,
cm = cMC = 3 = k ⇒ c’è un’unica soluzione;
- se γ = 0 & α 6= 0,
cM = 2 < cMC = 3 ⇒ non c’è soluzione;
z
Bo
a Bo
zz
zz
a Bo
a
z
za B
za B
oz
oz
z
z
Bo
a
a Bo
z
z
- Appunti di Meccanica dei Solidi/Statica, dalle lezioni del prof. P. Podio-Guidugli, a.a. 2007/8 -
50
2 Sistemi di Forze e Coppie
- γ = 0 & α = 0,
cM = cMC = 2 ⇒ ci sono ∞1 soluzioni.
8.2. Sia P ≡ l(2, 1) e sia f = f e1 . Si decomponga la forza (P, f ) nel sistema
{(P1 , f1 ), (P2 , f2 ), (P3 , f3 )}, dove
P1 ≡ (0, 0), P2 ≡ l(1, 0), P3 ≡ l(2, 0);
f1 = y1 e2 , f2 = y2 e2 , f3 = y3 e1 .
Soluzione. Imponendo l’uguaglianza dei risultanti, si trova:
y3 = f · e1 = f,
y1 + y2 = f · e2 = 0;
per avere l’uguaglianza dei momenti risultanti rispetto all’origine, si deve avere
che
ly2 = −lf.
La soluzione è dunque
y1 = f,
y2 = −f,
y3 = f.
8.3. Assegnato il sistema piano di forze e coppie S = {(P, f ), (Q, c)}, con
P ≡ l(1, 1), f = −f e2 ,
Q ≡ l(0, 1), c = f l e3 ,
- se ne determini l’asse centrale;
- si trovi un sistema piano di forze R = {(A, a), (B, b)}, con
A ≡ (0, 0), a = αe2 ,
B ≡ l(2, 2), b = βe3
che sia equipollente al sistema S.
Soluzione. Il sistema S è equipollente alla forza (Q, f ). Infatti, il momento
risultante rispetto a Q è:
−−
⇀
m(Q) = QP × f + c = le1 × (−f e2 ) + f l e3 = 0 .
Dunque l’asse centrale passa per Q e ha la direzione di e2 .
Quanto al sistema R, imponendo che il suo momento risultante rispetto a
Q sia nullo, si trova:
β = 0,
con il che la condizione sul risultante è soddisfatta se
α = −f.
z
Bo
a Bo
zz
zz
a Bo
a
z
za B
za B
oz
oz
z
z
Bo
a
a Bo
z
z
- Appunti di Meccanica dei Solidi/Statica, dalle lezioni del prof. P. Podio-Guidugli, a.a. 2007/8 -
8 Sistemi piani di forze e coppie
51
8.4 Poligono funicolare. Costruzione grafica dell’asse centrale
In questa sottosezione, le forze in gioco non solo sono parte di un sistema
piano, ma anche sono pensate come vettori applicati ad un punto arbitrario
delle loro rette d’azione.
Dato un sistema di due forze coplanari non parallele, il punto O di intersezione delle loro rette d’azione appartiene all’asse centrale; inoltre, l’asse
centrale è parallelo al risultante. Allora, trasportate le forze f e g in O e
costruitone il risultante (f + g ) con la ben nota regola del parallelogramma
(Fig. 2.31), la retta c è l’asse centrale del sistema dato.
Figura 2.31.
Questa semplice costruzione grafica è impossibile se il punto di intersezione delle rette di applicazione cade fuori dal foglio da disegno. Tuttavia, sia
in questo caso che in quello di un numero di forze maggiore di due, la determinazione dell’asse centrale si può eseguire costruendo il poligono funicolare
associato al sistema. Vediamo come.
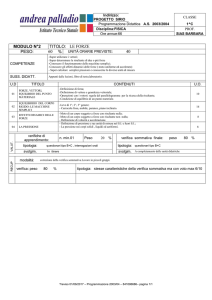
Consideriamo un sistema piano consistente di tre forze fi , di rette d’azione ri : {(f1 , r1 ), (f2 , r2 ), (f3 , r3 )}. Come nella Fig. 2.32, costruiamo la poligonale
delle forze OP1 P2 P3 , tracciando consecutivamente: da un punto O arbitrario,
il segmento OP1 , rappresentativo della forza f1 ; dal vertice P1 , il segmento
P1 P2 , rappresentativo della forza f2 ; infine, dal vertice P2 , il segmento P2 P3
−−⇀
corrispondente a f3 . Il vettore OP3 fornisce l’intensità, la direzione e il verso del risultante r . Congiungiamo adesso i vertici della poligonale delle forze
OP1 P2 P3 con un punto P , detto polo, scelto arbitrariamente nel piano delle
forze, ma in modo che non appartenga né alla poligonale delle forze né al seg−−
⇀ −−⇀ −−⇀
mento OP3 che la chiude; otteniamo cosı̀ i raggi proiettanti P O, P P1 , P P2 ,
−−⇀
P P3 . Tracciamo poi, a partire da un punto arbitrario della retta r1 , una retta
−−
⇀
a parallela al primo raggio proiettante P O; dal punto in cui a incontra r1 ,
tracciamo la retta b parallela a P P1 ; dal punto di intersezione di b con r2 ,
−−⇀
tracciamo la retta c parallela a P P2 ; infine, dal punto di intersezione di c con
−−⇀
r3 tracciamo la retta parallela a P P3 . La spezzata abcd che cosı̀ otteniamo
z
Bo
a Bo
zz
zz
a Bo
a
z
za B
za B
oz
oz
z
z
Bo
a
a Bo
z
z
- Appunti di Meccanica dei Solidi/Statica, dalle lezioni del prof. P. Podio-Guidugli, a.a. 2007/8 -
52
2 Sistemi di Forze e Coppie
Figura 2.32.
è chiamata poligono funicolare, perché la si può interpretare meccanicamente
come la configurazione d’equilibrio di una fune perfettamente flessibile e inestensibile, fissata in due punti del primo e ultimo lato e sollecitata dalle forze
del sistema assegnato.
La retta c parallela al risultante r e passante per il punto di intersezione
tra il primo e l’ultimo lato del poligono funicolare è l’asse centrale.
Infatti, la forza f1 può essere decomposta in due forze aventi come rette
−−⇀ −−⇀
d’azione a e b, di vettore rappresentativo pari, rispettivamente, a P O e P1 P ;
similmente, la forza f2 può essere decomposta in due forze aventi come rette
−−⇀ −−⇀
d’azione b e c, pari a P P1 e P2 P ; la forza f3 , infine, è equipollente a due forze
−−⇀ −−⇀
aventi rette d’azione c e d, pari a P P2 e P3 P . Abbiamo cosı̀ ottenuto un sistema
equipollente a quello assegnato. Ai lati interni b e c del poligono funicolare
sono applicate forze che costituiscono una coppia di braccio nullo (hanno
stessa intensità, stessa retta d’azione e verso opposto). Il sistema assegnato
è equipollente, quindi, a due sole forze, le cui rette d’azione sono il primo e
l’ultimo lato del poligono funicolare. Come nel caso studiato in precedenza,
l’asse centrale del sistema è la retta parallela al risultante r e passante per il
punto d’intersezione K di primo e ultimo lato del poligono funicolare, punto
che cade nel piano del disegno.
Osservazione. Ad ogni sistema piano di forze applicate alla propria retta
d’azione si possono associare ∞3 poligoni funicolari. Infatti, si può scegliere il
polo P in ∞2 modi, la posizione del primo lato del poligono funicolare in ∞1
modi.
Se un sistema piano di forze ha risultante nullo, come nel caso della coppia
di forze mostrata in Fig. 2.33, la poligonale delle forze è chiusa (il primo e
l’ultimo vertice coincidono) e il poligono funicolare ha il primo e l’ultimo lato
z
Bo
a Bo
zz
zz
a Bo
a
z
za B
za B
oz
oz
z
z
Bo
a
a Bo
z
z
- Appunti di Meccanica dei Solidi/Statica, dalle lezioni del prof. P. Podio-Guidugli, a.a. 2007/8 -
8 Sistemi piani di forze e coppie
53
paralleli, sicchè il loro punto di intersezione è un punto improprio; dunque,
Figura 2.33.
l’asse centrale non è a rigore determinabile. Con un opportuno passaggio al
limite, si può tuttavia dar senso alla nozione di asse centrale anche in questo
caso e, più in generale, nel caso di ogni sistema piano di forze applicate alle
loro rette d’azione per il quale la poligonale delle forze sia chiusa (r = 0) e il
poligono funicolare abbia primo e ultimo lato paralleli.
Consideriamo, per semplicità, solo due forze f e g parallele e opposte per
−−⇀
verso (Fig. 2.34). Se g tende a −f , l’inclinazione del raggio proiettante P P2
Figura 2.34.
−−
⇀
rispetto al raggio P O diminuisce e il punto di intersezione K si allontana verso
sinistra, tendendo al punto improprio del primo lato del poligono funicolare;
nel contempo, il risultante r tende al vettore nullo, mentre il primo e l’ultimo
lato del poligono funicolare tendono a divenire paralleli. Facendo variare il
polo P , la direzione del primo lato del poligono funicolare cambia come si
vuole; quindi, il procedimento di limite descritto produce un arbitrario punto
della retta impropria del piano del disegno. Si può allora pensare che l’asse
centrale coincida con la retta impropria, cui sia applicato un risultante di
intensità nulla.
z
Bo
a Bo
zz
zz
a Bo
a
z
za B
za B
oz
oz
z
z
Bo
a
a Bo
z
z
- Appunti di Meccanica dei Solidi/Statica, dalle lezioni del prof. P. Podio-Guidugli, a.a. 2007/8 -
54
2 Sistemi di Forze e Coppie
Consideriamo adesso di nuovo la coppia di forze rappresentata in Fig. 2.34.
Se facciamo diminuire la distanza tra le rette d’azione r ed s, la poligonale
delle forze non varia; diminuisce, invece, la distanza tra il primo e l’ultimo
lato del poligono funicolare; al limite, per r = s, tali lati coincidono e il
poligono funicolare si chiude. Da questo esempio si può trarre una conclusione
generale: ogni sistema di forze applicate alla propria retta d’azione che abbia
risultante e momento risultante nulli ha anche poligonale delle forze e poligono
funicolare entrambi chiusi. Di questa proprietà ci si può avvalere per risolvere
graficamente vari problemi di ricerca delle reazioni.
Esercizi
8.4. Con riferimento alla figura, si cerchino le reazioni vincolari in A e in B,
tanto analiticamente che graficamente
Figura 2.35.
Soluzione. Per via analitica: si decomponga il sistema di forze {(Q1 , f1 ), (Q2 , f2 )}
nel sistema {(A, reA1 ), (A, reA2 ), (B, rB )}, con reA1 = rA1 e1 , reA2 = rA2 e2 ,
rB = rB e1 ; si cambi il verso a tutti i vettori trovati: rA1 = −e
rA1 , ecc.
Per via grafica: si costruisca la porzione P1 P2 P3 della poligonale delle forze,
proseguendo con un segmento verticale (come la reazione in B), del quale per
il momento è ignota la lunghezza; si scelga un polo P di proiezione; si disegni
il secondo lato del poligono funicolare associato – facendolo passare per A,
l’unico punto della retta d’azione della reazione che sia noto a priori – poi gli
altri lati, fino a determinare il punto K; si unisca A con K e si consideri il
segmento ottenuto come primo e ultimo lato del poligono funicolare (cui viene
perciò imposto di essere chiuso); da P , si guidi il raggio proiettante parallelo
ad AK, determinando il vertice P4 = O di una poligonale delle forze chiusa;
−−⇀
−−⇀
allora, P3 A è la reazione in B, P4 A quella in A.