COME REALIZZARE UN
BRACCIO ROBOTICO
PROGETTAZIONE E REALIZZAZIONE MECCANICA
Dott. Tirelli Paolo – Prof. N. Alberto Borghese
OBIETTIVO:
Realizzare un braccio robotico che potesse competere
all’interno della competizione internazionale robocup@home:
Come realizzare un braccio robotico
Progettazione e Realizzazione Meccanica
Prof. N. Alberto Borghese – Dott. Paolo Tirelli
18/05/2009
The RoboCup@Home league aims to develop service and
assistive robot technology with high relevance for future
personal domestic applications. [http://www.ai.rug.nl/robocupathome/]
2
LE PROVE RICHIESTE DALLA
ROBOCUP@HOME
Alcune delle prove richieste:
Frigorifero:
Aprire lo sportello
Estrarre una lattina di soda
Chiudere lo sportello
Giornale:
Raggiungere il giornale posto nella stanza accanto
Raccogliere il giornale
Portare il giornale nella stanza di partenza
Porta:
Aprire la porta con maniglia
Entrare nella stanza accanto
Richiudere la porta alla proprie spalle
?
Come realizzare un braccio robotico
Progettazione e Realizzazione Meccanica
Prof. N. Alberto Borghese – Dott. Paolo Tirelli
18/05/2009
3
LA PROGETTAZIONE
Prof. N. Alberto Borghese – Dott. Paolo Tirelli
Primo passo per la realizzazione di un braccio robotico
(come di qualsiasi altra cosa) è l’ideazione dello stesso.
Si tratta di fare delle ipotesi su quale potrebbe essere la
struttura in base ai task richiesti.
Per fare questo si può utilizzare un qualsiasi software di
progettazione 3D, o mettere tutto nero su bianco attraverso
alcuni schizzi.
Come realizzare un braccio robotico
Progettazione e Realizzazione Meccanica
18/05/2009
4
TENTATIVI PROGETTUALI
L’EVOLUZIONE DELLA SPECIE (1/3)
Prof. N. Alberto Borghese – Dott. Paolo Tirelli
3
2
Come realizzare un braccio robotico
Progettazione e Realizzazione Meccanica
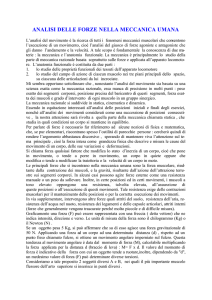
Prima ipotesi (3 gradi di libertà):
1: base rotante
2: spalla con ruota dentata (tipo vite senza fine,
rotazione verticale)
3: gomito con ruota dentata (tipo vite senza fine,
rotazione verticale della pinza)
note: link abbastanza lunghi e non estendibili
18/05/2009
Link
1
5
TENTATIVI PROGETTUALI
L’EVOLUZIONE DELLA SPECIE (2/3)
Prof. N. Alberto Borghese – Dott. Paolo Tirelli
3
Come realizzare un braccio robotico
Progettazione e Realizzazione Meccanica
Seconda ipotesi (3 gradi di libertà):
1: base rotante
2: link0 (base-spalla) di tipo prismatico (o similprismatico)
3: spalla con ruota dentata (tipo vite senza fine,
rotazione verticale)
note: link0 estendibile e link1 abbastanza lungo
18/05/2009
2
Link
1
6
TENTATIVI PROGETTUALI
L’EVOLUZIONE DELLA SPECIE (3/3)
Prof. N. Alberto Borghese – Dott. Paolo Tirelli
4
3
Come realizzare un braccio robotico
Progettazione e Realizzazione Meccanica
Terza ipotesi (4 gradi di libertà):
1: base rotante
2: link0 (base-spalla) di tipo prismatico (o similprismatico)
3: spalla con ruota dentata (tipo vite senza fine,
rotazione verticale)
4: link1 (spalla-polso) di tipo prismatico (o similprismatico)
note: link0 e link1 estendibili
18/05/2009
2
Link
1
7
TENTATIVI PROGETTUALI
LA STRUTTURA DEL BRACCIO (1/2)
18/05/2009
Tipo gru
Base rotante
Link verticale lungo
Prof. N. Alberto Borghese – Dott. Paolo Tirelli
Come realizzare un braccio robotico
Progettazione e Realizzazione Meccanica
Link orizzontale
telescopico
Spalla rotatoria
8
TENTATIVI PROGETTUALI
LA STRUTTURA DEL BRACCIO (2/2)
Come realizzare un braccio robotico
Progettazione e Realizzazione Meccanica
Prof. N. Alberto Borghese – Dott. Paolo Tirelli
18/05/2009
Segmento telescopico
Pinza bi-funzionale
9
TENTATIVI PROGETTUALI
LA STRUTTURA DELLA PINZA (1/2)
Prof. N. Alberto Borghese – Dott. Paolo Tirelli
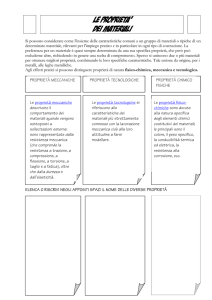
Ciascun dito può essere costituito da più
segmenti collegati da carrucole. Le dita più
lunghe possono essere costituite da 3 segmenti,
quelle più corte da 2 segmenti.
Una bozza di una mano a
quattro
dita,
con
carrucole, tiranti e molle.
Come realizzare un braccio robotico
Progettazione e Realizzazione Meccanica
Prima proposta: Come mano umanoide. Un insieme di tre
(o quattro) dita coordinate: due per la presa ed una (due)
per la chiusura attorno all’oggetto.
18/05/2009
10
TENTATIVI PROGETTUALI
LA STRUTTURA DELLA PINZA (2/2)
La prima pinza composta da elementi paralleli che scorrono su
di una vite (destrorsa + sinistrorsa).
La seconda pinza composta da un elemento parallelo a gancio
(fisso) ed un elemento, collegato ad una vite, che scorre fino a
chiudersi al contatto con l’estremità del gancio, in modo da
chiudere l’anello.
Prof. N. Alberto Borghese – Dott. Paolo Tirelli
Come realizzare un braccio robotico
Progettazione e Realizzazione Meccanica
Seconda proposta: Su di una base installare due pinze in
grado di soddisfare la totalità dei task. Si realizza così una
pinza bi-funzionale:
18/05/2009
11
PROPOSTE REALIZZATIVE
Prof. N. Alberto Borghese – Dott. Paolo Tirelli
Come realizzare un braccio robotico
Progettazione e Realizzazione Meccanica
La prima proposta della struttura braccio + pinza
prevedeva un totale di 4 gradi di libertà, così distribuiti:
Base del braccio rotante.
Traslazione verticale del link orizzontale del braccio su
quello verticale.
Rotazione verticale del link orizzontale del braccio.
Chiusa del dito ad uncino.
18/05/2009
12
PROPOSTE REALIZZATIVE
LA BASE DEL BRACCIO
Come realizzare un braccio robotico
Progettazione e Realizzazione Meccanica
Prof. N. Alberto Borghese – Dott. Paolo Tirelli
Rotante
Configurazioni:
[-180°, +180°] di rotazione ingombro di cavi, PC, …
360° di rotazione cavi, PC, … installati sulla base
stessa.
18/05/2009
13
PROPOSTE REALIZZATIVE
LINK VERTICALE
Struttura a due componenti paralleli che montano due binari su
cui far scorrere il sistema di traslazione verticale del braccio.
Link verticale
Link verticale
Come realizzare un braccio robotico
Progettazione e Realizzazione Meccanica
Prof. N. Alberto Borghese – Dott. Paolo Tirelli
Di lunghezza prefissata.
18/05/2009
14
PROPOSTE REALIZZATIVE
SISTEMA DI TRASLAZIONE VERTICALE
Prof. N. Alberto Borghese – Dott. Paolo Tirelli
Scatola che scorre lungo i binari e su cui è installato il link
orizzontale
Sistema di carrucole per sollevare o lasciar scendere la scatola.
Il link orizzontale viene portato verso l’alto da cavi tirati da un
motore posto alla base del braccio. Per abbassarlo è sufficiente
rilasciare, in maniera controllata, i cavi, sfruttando la forza di
gravità.
Come realizzare un braccio robotico
Progettazione e Realizzazione Meccanica
Due binari applicati sulla struttura verticale, l’uno di fronte
all’altro (nella realizzazione finale questi sono integrati all’interno
dei link verticali).
18/05/2009
15
PROPOSTE REALIZZATIVE
LINK ORIZZONTALE
Prof. N. Alberto Borghese – Dott. Paolo Tirelli
Il link sarà montato sulla scatola che scorre lungo i link
verticali (come descritto in precedenza).
In senso opposto al link orizzontale, sarà montato un
contrappeso.
Come realizzare un braccio robotico
Progettazione e Realizzazione Meccanica
Costituito da un unico componente di lunghezza prefissata,
alla cui estremità è collegata la pinza.
18/05/2009
16
PROPOSTE REALIZZATIVE
SISTEMA DI ROTAZIONE VERTICALE
Prof. N. Alberto Borghese – Dott. Paolo Tirelli
A motore spento, l’attrito tra la vite senza fine e la ruota dentata è
tale da realizzare il bloccaggio della rotazione mantenendo il
braccio fermo all’ultima posizione raggiunta.
L’intera struttura di rotazione trasla quando il link orizzontale
scorre sul link verticale.
Differenti possibilità in cui posizionare il motore:
All’interno del contrappeso del link orizzontale (riduzione peso
complessivo).
Lateralmente alla scatola (perpendicolare al link orizzontale).
Come realizzare un braccio robotico
Progettazione e Realizzazione Meccanica
La rotazione avviene grazie ad un motore che, tramite una vite
senza fine, trasmette il movimento ad una ruota dentata a cui il
link orizzontale è vincolato.
18/05/2009
17
PROPOSTE REALIZZATIVE
SISTEMA DI COMPENSAZIONE DEL MOVIMENTO: PANTOGRAFO
Prof. N. Alberto Borghese – Dott. Paolo Tirelli
Come realizzare un braccio robotico
Progettazione e Realizzazione Meccanica
Consente alla pinza di restare parallela al suolo durante la
rotazione verticale del link orizzontale.
Realizzato in modo tale che, durante la rotazione verticale,
il polso ruoti, anch’esso verticalmente, di un angolo pari,
ma opposto, a quello disegnato dalla rotazione del link
orizzontale rispetto alla base del braccio.
18/05/2009
18
PROPOSTE REALIZZATIVE
LA PINZA (1/2)
Prof. N. Alberto Borghese – Dott. Paolo Tirelli
Come realizzare un braccio robotico
Progettazione e Realizzazione Meccanica
Collegata al link orizzontale mediante una cerniera che le
permette di ruotare secondo il sistema di compensazione
del movimento.
Costituita da due dita, un dito dritto ed uno ad uncino.
Il dito dritto è vincolato ad un binario, che gli consente di
chiudersi sul dito ad uncino.
18/05/2009
19
PROPOSTE REALIZZATIVE
LA PINZA (2/2)
Prof. N. Alberto Borghese – Dott. Paolo Tirelli
Come realizzare un braccio robotico
Progettazione e Realizzazione Meccanica
Alternativa 1: collegare direttamente all’asse di rotazione
del motore il dito ad uncino (meno affidabile e robusta).
Alternativa 2: può essere aggiunto un ulteriore grado di
liberta, la rotazione assiale (dividendo la pinza in due
parti).
18/05/2009
20
18/05/2009
Come realizzare un braccio robotico
Progettazione e Realizzazione Meccanica
21
Prof. N. Alberto Borghese – Dott. Paolo Tirelli
PROPOSTE REALIZZATIVE
IL BRACCIO ROBOTICO
DIMENSIONAMENTO
ATTORI IN GIOCO
Prof. N. Alberto Borghese – Dott. Paolo Tirelli
La coppia (o momento torcente)
Parallelo all’asse di rotazione
Momento flettente
Perpendicolare all’asse di rotazione
L’inerzia
La potenza
Il rapporto di trasmissione
L’attrito (radente)
Oltre la massa, la forza, le velocità (angolare, tangenziale) e le
accelerazioni (angolare e tangenziale)
Come realizzare un braccio robotico
Progettazione e Realizzazione Meccanica
Passiamo ora a definire quali saranno le grandezze fisiche
da considerare all’atto del dimensionamento del braccio
robotico. Ovvero quali sono le grandezze fisiche che
maggiormente influenzano la stabilità, il controllo e la
scelta dei componenti del braccio robotico.
Individuiamo (e di seguito andremo a descrivere):
18/05/2009
22
DIMENSIONAMENTO
ATTORI IN GIOCO – LA COPPIA
Prof. N. Alberto Borghese – Dott. Paolo Tirelli
ΣFi = 0
È anche detto coppia (di forze), in quanto può
essere rappresentato in modo equivalente come la
conseguenza dell'applicazione di due forze distinte
uguali e contrarie, ciascuna con modulo pari alla
metà di quello del momento torcente e agenti su
due punti della leva esattamente opposti rispetto
al fulcro P.
Data una leva, si definisce il momento di una forza, T, come il
prodotto vettoriale tra la forza, F, applicata in un punto e la
distanza, r, tra quel punto e il fulcro della leva. Il vettore
"momento torcente" è disposto lungo la direzione dell'asse di
rotazione (regola della mano destra).
[N*m]
Come realizzare un braccio robotico
Progettazione e Realizzazione Meccanica
Coppia, T (o momento torcente)
La forza è applicata perpendicolarmente all'asse di
rotazione ma non lo interseca, come per esempio
nel caso dell'azione esercitata da un autista sul
volante dell'automobile quando sterza.
18/05/2009
23
DIMENSIONAMENTO
ATTORI IN GIOCO – IL MOMENTO FLETTENTE (1/2)
Prof. N. Alberto Borghese – Dott. Paolo Tirelli
M: è il momento flettente (N mm)
F: è la forza
d: è il braccio, ovvero la distanza minima fra i due vettori
Tale azione M è detta flettente poiché in grado di imprimere una
curvatura locale, nel suo punto di applicazione.
Es.: Possiamo meglio comprendere il concetto prendendo un ramo
d' albero o semplicemente un bastone di legno. Impugnando il
bastone alle sue estremità con le mani imprimiamo una flessione
in modo che il bastone assuma una forma a U, con le fibre
superiori compresse e le fibre inferiori tese. La sollecitazione
impressa dalle nostre braccia al bastone è il momento flettente; la
deformazione subita dal bastone, la forma ad U è detta curvatura.
Come realizzare un braccio robotico
Progettazione e Realizzazione Meccanica
Il momento flettente è una coppia di due vettori forza, paralleli ed
aventi verso opposto, aventi punti di applicazione a una distanza
non nulla.
18/05/2009
24
DIMENSIONAMENTO
ATTORI IN GIOCO – IL MOMENTO FLETTENTE (1/2)
Prof. N. Alberto Borghese – Dott. Paolo Tirelli
Se la sollecitazione cresce ed oltrepassa un valore critico, avviene
la rottura di alcune fibre, e si perde la possibilità di reversibilità:
il bastone conserva una deformazione impressa, mantenendo una
piccola curvatura permanente, anche se la sollecitazione viene
azzerata.
Se la sollecitazione cresce ed oltrepassa un secondo valore critico,
detto punto di rottura, avviene la rottura locale del bastone
Una trave prima e dopo
l'applicazione di una forza
Come realizzare un braccio robotico
Progettazione e Realizzazione Meccanica
Se la sollecitazione è lieve, il fenomeno è facilmente reversibile,
perché smettendo di compiere lo sforzo con le braccia il bastone
ritorna alla situazione iniziale, detta configurazione indeformata.
18/05/2009
25
DIMENSIONAMENTO
ATTORI IN GIOCO – L’INERZIA (1/2)
Prof. N. Alberto Borghese – Dott. Paolo Tirelli
Tuffatori che minimizzano il loro momento
d'inerzia per aumentare la loro velocità di
rotazione.
Come realizzare un braccio robotico
Progettazione e Realizzazione Meccanica
Inerzia (o momento di inerzia)
Il momento d'inerzia di un corpo, rispetto a un asse dato,
descrive quanto è difficile cambiare il suo moto angolare
attorno al proprio asse. Tale grandezza tiene conto di come è
distribuita la massa del corpo attorno all'asse di rotazione.
Es. Si considerino due dischi (A e B) della stessa massa. Il
disco A ha un raggio più grande del disco B. Assumendo che
abbiano spessore e massa distribuita uniformemente, è più
difficile accelerare il disco A (cambiare la sua velocità
angolare) poiché la sua massa è distribuita in maniera più
distante del suo asse di rotazione. In questo caso il disco A ha
un momento d'inerzia maggiore del disco B.
18/05/2009
26
DIMENSIONAMENTO
ATTORI IN GIOCO – L’INERZIA (2/2)
Prof. N. Alberto Borghese – Dott. Paolo Tirelli
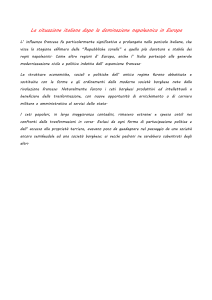
Alcuni esempi di momento di inerzia nel caso di corpo rigido
(oggetto materiale le cui parti sono soggette al vincolo di rigidità):
u.m.:[kg*m²]
Come realizzare un braccio robotico
Progettazione e Realizzazione Meccanica
Il momento di inerzia di un corpo è funzione della sua geometria,
in particolare di come è distribuita la massa al suo interno. Il
momento d'inerzia ha due forme, scalare I, in seguito J, (usata
quando è noto l'asse di rotazione) e una più generale tensoriale
che non richiede la conoscenza dell'asse di rotazione.
18/05/2009
27
DIMENSIONAMENTO
ATTORI IN GIOCO – INGRANAGGI
Prof. N. Alberto Borghese – Dott. Paolo Tirelli
Ingranaggi di diversa dimensione sono spesso usati in coppia per
aumentare il momento torcente riducendo nel contempo la velocità
angolare, o viceversa aumentare la velocità diminuendo il momento. È
il principio alla base del cambio di velocità delle automobili.
forze in
gioco in un
ingranaggio
Serie di ruote
dentate in una
macchina
agricola
Come realizzare un braccio robotico
Progettazione e Realizzazione Meccanica
Una ruota dentata studiata per trasmettere momento torcente ad
un'altra ruota o elemento dentato forma con quest'ultima un
ingranaggio. La ruota più piccola è comunemente chiamata pignone,
mentre la grande è chiamata corona.
18/05/2009
28
DIMENSIONAMENTO
ATTORI IN GIOCO – IL RAPPORTO DI TRASMISSIONE
Prof. N. Alberto Borghese – Dott. Paolo Tirelli
Perché le ruote possano correttamente ingranare tra
loro, è necessario che il passo o il modulo, ovvero la
distanza tra le creste, sia uguale per entrambe.
La legge di conservazione dell'energia impone che la
potenza in uscita dal sistema sia uguale a quella
entrante, meno le perdite per attrito. Il rapporto tra
le coppie, Ti, è dato direttamente dal rapporto tra i
denti, ni, (non tenendo conto delle perdite, il segno
meno esprime il trasmettersi di una coppia di verso
opposto).
Come realizzare un braccio robotico
Progettazione e Realizzazione Meccanica
Data una coppia di ingranaggi, il
rapporto di trasmissione (o conversione, o
riduzione) della velocità è inversamente
proporzionale al rapporto tra il numero
dei rispettivi denti (Il segno negativo
indica l'inverso senso di rotazione di due
ruote dentate che ingranano):
18/05/2009
29
DIMENSIONAMENTO
ATTORI IN GIOCO – COPPIA VITE SENZA FINE-CORONA DENTATA (1/2)
Prof. N. Alberto Borghese – Dott. Paolo Tirelli
"Corona Dentata“ è l’ingranaggio i cui denti
hanno inclinazione, profilo e dati costruttivi
compatibili con quelli della vite alla quale si
accoppia.
La trasmissione del movimento è di
norma dato dalla vite (definita
"conduttrice“).
Generalmente
utilizzato
per
garantirsi la non reversibilità del
moto (la vite induce la rotazione della
corona ma, a causa dei forti attriti, il
viceversa non è possibile).
Come realizzare un braccio robotico
Progettazione e Realizzazione Meccanica
"Vite senza fine" così definita perché la sua
rotazione ha il solo scopo di trasmettere il
movimento. Il passo della vite può essere a uno o
più principi (o avvii).
18/05/2009
30
DIMENSIONAMENTO
Prof. N. Alberto Borghese – Dott. Paolo Tirelli
Uno svantaggio di questo meccanismo è che ha rendimento < 0,5 .
Z2
R=
Z1
z1 := numero di avvii della vite senza fine
z2 := numero di denti della ruota dentata
LEONARDO DA VINCI
Vite senza fine concava
Il disegno illustra una prima idea di
ingranaggio globoidale:
"E perche questa tal vite ha sempre quattro
denti della rota che ella move [mediante una
manovella che volta un rocchetto] in varie
distanze dal suo centro, essa adopera con
continua egualita di forza".
Come realizzare un braccio robotico
Progettazione e Realizzazione Meccanica
18/05/2009
ATTORI IN GIOCO – COPPIA VITE SENZA FINE-CORONA DENTATA (2/2)
L'accoppiamento ha lo scopo di trasferire moto e momento torcente
con elevato rapporto di trasmissione R, tra due assi perpendicolari
non intersecanti. Influiscono sul rapporto l'inclinazione del filetto
della vite e il numero dei denti della corona.
31
DIMENSIONAMENTO
ATTORI IN GIOCO – VINCOLI DI ACCOPPIAMENTO
Prof. N. Alberto Borghese – Dott. Paolo Tirelli
Denti troppi piccoli, così come un filetto troppo sottile, soggetti a
potenze troppo elevate provocano lo slittamento di questi con la
rispettiva corona, fino alla rottura degli stessi.
Come realizzare un braccio robotico
Progettazione e Realizzazione Meccanica
Esiste un vincolo di dimensione cui sono soggetti i denti degli
ingranaggi, così come il filetto della vite senza fine, e che si
ripercuote sulla potenza che questi sono in grado di sopportare.
18/05/2009
32
DIMENSIONAMENTO
ATTORI IN GIOCO – ULTIMI CENNI (1/3)
Potenza:
Prof. N. Alberto Borghese – Dott. Paolo Tirelli
Attrito radente:
L'attrito è una forza dissipativa [N*m] che si esercita tra due
superfici a contatto tra loro e si oppone al loro moto relativo.
Se si manifesta tra superfici in quiete tra loro è detta di attrito
statico, mentre tra superfici in moto relativo si parla di attrito
dinamico.
L’attrito radente è dovuto allo strisciamento.
è la componente perpendicolare al piano di appoggio della
risultante delle forze agenti sul corpo.
µr è il coefficiente di attrito radente (grandezza
adimensionale e dipende dai materiali delle due superfici a
contatto).
Come realizzare un braccio robotico
Progettazione e Realizzazione Meccanica
P: è la potenza del motore espressa in W (watt)
M: è la coppia generata espressa in Nm (newton × metri)
ω: è la velocità angolare espressa in radianti al secondo a cui si
riferisce la potenza P ( ω = 2·̟·f dove f= n° giri/60 )
18/05/2009
33
DIMENSIONAMENTO
ATTORI IN GIOCO – ULTIMI CENNI (2/3)
Prof. N. Alberto Borghese – Dott. Paolo Tirelli
Come realizzare un braccio robotico
Progettazione e Realizzazione Meccanica
Il moto circolare:
Consiste nel moto di un punto materiale lungo una
circonferenza.
La velocità e l'accelerazione variano in funzione del
cambiamento di direzione del moto.
Tale cambiamento si può misurare comodamente usando le
misure angolari per cui le equazioni del moto, introdotte con il
moto rettilineo, vanno riviste e rielaborate con misure
angolari.
Caso 2D:
18/05/2009
Spostamento (2D)
34
DIMENSIONAMENTO
ATTORI IN GIOCO – ULTIMI CENNI (3/3)
18/05/2009
Caso 3D:
Prof. N. Alberto Borghese – Dott. Paolo Tirelli
Velocità tangenziale [m/s]
Accelerazione angolare
[m/s2]
Accelerazione tangenziale
[m/s2]
Come realizzare un braccio robotico
Progettazione e Realizzazione Meccanica
Velocità angolare [rad/s]
35
DIMENSIONAMENTO
COSA OCCORRE FARE
Prof. N. Alberto Borghese – Dott. Paolo Tirelli
Come realizzare un braccio robotico
Progettazione e Realizzazione Meccanica
Dopo aver introdotto le grandezze fisiche di interesse alla
trattazione del braccio robotico, vediamo come queste
vengono adoperate per il dimensionamento.
Di seguito saranno trattate le forze in gioco e come da
queste dipende la scelta dei materiali, le caratteristiche dei
motori e le specifiche di costruzione del braccio robotico.
18/05/2009
36
DIMENSIONAMENTO
SISTEMA DI ROTAZIONE VERTICALE
Prof. N. Alberto Borghese – Dott. Paolo Tirelli
Si tratta di arrivare a calcolare la coppia necessaria a far ruotare
il braccio, ovvero la coppia che il motore dovrà generare affinché il
link orizzontale sia in grado di ruotare alla velocità desiderata.
Per fare questo sarà necessario tener conto delle forze che
agiscono sul sistema (derivanti dalle masse in esame del link
orizzontale, della pinza ad asso attaccata e del contrappeso) degli
attriti in gioco, dell’inerzia del sistema, del bilanciamento
ottenuto mediante il contrappeso .
Si vuole arrivare ad ottenere il valore della coppia totale
necessaria a generare la rotazione del braccio robotico …
CTotale _ rot = Cµ _ rot + Cinerzia _ rot + Ccompensazione _ rot + Cequilibrio _ rot
Come realizzare un braccio robotico
Progettazione e Realizzazione Meccanica
Vediamo come dimensionare il sistema di rotazione verticale.
18/05/2009
Coppia dovuta alle forze di attrito
Coppia dovuta all’inerzia del sistema
37
Coppia dovuta alla compensazione delle forze cui è
soggetto il sistema
Coppia dovuta alla compensazione ad opera del contrappeso
DIMENSIONAMENTO
COPPIA E POTENZA DI ROTAZIONE VERTICALE
… e la potenza che il motore deve fornire.
Inerzia del sistema
Paccelerazione _ rot
Prof. N. Alberto Borghese – Dott. Paolo Tirelli
J sist _ rot ⋅ ω 2 ω : velocità angolare
=
t : tempo di rotazione
t
Una volta raggiunta la velocità desiderata, la potenza richiesta al
motore è solo quella necessaria per vincere la coppia frenante
(potenza a regime) e vale:
Pcoppia _ frenante _ rot = ω ⋅ ( Cµ _ rot + Ccompesazione _ rot + Cequilibrio _ rot )
Come realizzare un braccio robotico
Progettazione e Realizzazione Meccanica
La potenza che il motore deve fornire per accelerare una massa a
coppia costante è:
18/05/2009
38
DIMENSIONAMENTO
SISTEMA DI ROTAZIONE VERTICALE (1/6)
Per cominciare calcoliamo la coppia necessaria a mantenere il
sistema in equilibrio. la struttura utilizza un contrappeso per
compensare il peso dello lo sbraccio, quindi:
Prof. N. Alberto Borghese – Dott. Paolo Tirelli
Supponendo che la pinza abbia afferrato un oggetto, andiamo a
calcolare quale è la coppia necessaria a vincere la resistenza alla
rotazione generata dal peso dell’oggetto afferrato (coppia
necessaria all’equilibrio e non alla rotazione):
Ccompensazione _ rot
f
(
=
oggetto
⋅ boggetto )
( R ⋅η )
m
(
=
oggetto
⋅ g ⋅ boggetto )
( R ⋅η )
Dove R rappresenta il rapporto di riduzione realizzato dalla
coppia “vite senza fine-ruota dentata” e η il suo rendimento.
In fase di dimensionamento è stata considerata l’ipotesi di peggior
rendimento, ovvero:
η = 0.54
Metà rendimento teorico massimo.
Come realizzare un braccio robotico
Progettazione e Realizzazione Meccanica
Cequilibrio _ rot = 0
18/05/2009
39
DIMENSIONAMENTO
SISTEMA DI ROTAZIONE VERTICALE (2/6)
Prof. N. Alberto Borghese – Dott. Paolo Tirelli
1
=
R
2
1
1
2
2
2
2
2
2
⋅ ⋅ mlink ⋅ l link
+ m pinza ⋅ rpinza
+ moggetto
⋅ roggetto
+ mcontr . ⋅ rcontr
+
⋅
m
⋅
l
.
base base + J motore _ rot
3
12
dove:
Come realizzare un braccio robotico
Progettazione e Realizzazione Meccanica
J sist _ rot
Andiamo a calcolare l’inerzia del sistema, ovvero la tendenza della
materia, nel caso specifico ed in prima approssimazione un corpo
rigido, a conservare il proprio stato di moto o di quiete e ad
opporre resistenza alle forze che tendono a modificare tale stato.
18/05/2009
mi := rappresenta la massa del componente, supposta
uniformemente distribuita
li := rappresenta la lunghezza del componente
ri := rappresenta la distanza del componente dall’asse di
rotazione
R := rappresenta il rapporto di riduzione che realizza la
coppia “vite senza fine-ruota dentata”
Jmotore_rot := inerzia del motore che genera la rotazione
40
DIMENSIONAMENTO
SISTEMA DI ROTAZIONE VERTICALE (3/6)
Per i calcoli sono state considerate le seguenti configurazioni:
Prof. N. Alberto Borghese – Dott. Paolo Tirelli
L’oggetto da sollevare, il polso ed il contrappeso
sono supposti punti materiali, in cui è
concentrata tutta la loro massa, e posti a
distanza r dall’asse di rotazione.
Il link orizzontale è supposto essere una
sbarra mono-dimensionale di lunghezza l
ruotante rispetto ad un asse passante per un
suo estremo.
La base su cui sono montati i componenti del
sistema di rotazione, e facente parte essa
stessa del sistema, è supposta essere una
sbarra di lunghezza l ruotante rispetto ad un
asse passante per il suo baricentro.
Come realizzare un braccio robotico
Progettazione e Realizzazione Meccanica
18/05/2009
41
DIMENSIONAMENTO
SISTEMA DI ROTAZIONE VERTICALE (4/6)
ω=
Prof. N. Alberto Borghese – Dott. Paolo Tirelli
t
La quale determina una accelerazione angolare, in rad/sec2, pari a:
α=
θ
ω
t
Ora per ottenere la velocità del braccio in giri al minuto:
ω
vrotazione =
⋅ 60
2π
Ricordando che il sistema di rotazione utilizza una coppia “vite
senza fine-ruota dentata”, la velocità a cui deve girare il motore:
vmotore _ rot = vrotazione ⋅ R
La coppia necessaria a vincere l’inerzia che si oppone alla rotazione :
Cinerzia _ rot = J sist _ rot ⋅ α
Come realizzare un braccio robotico
Progettazione e Realizzazione Meccanica
Analiziamo la velocità col la quale far ruotare il braccio.
Fissato l’angolo da percorrere (θ) e il tempo necessario a
percorrerlo (t) calcolare la velocità angolare , in rad/sec,
necessaria a mettere il braccio in rotazione.
18/05/2009
42
DIMENSIONAMENTO
SISTEMA DI ROTAZIONE VERTICALE (5/6)
Ftm1 =
Forza normale al dente:
Prof. N. Alberto Borghese – Dott. Paolo Tirelli
Fn =
2M T 2
( d m1 ⋅η ⋅ R )
Ftm1
( cos α n ⋅ ( sin γ m + µ ⋅ cos γ m ) )
Forza radiale al dente:
Frm = Fn ⋅ sin α n
La coppia dovuta alle forze di attrito risulta:
Cµ _ rot = − Fn ⋅ cos α n ⋅ µ ⋅ bvite
Come realizzare un braccio robotico
Progettazione e Realizzazione Meccanica
Nel caso di vite conduttrice (ovvero che induce il movimento) della
rotazione, il calcolo delle forze di attrito si sviluppa come segue.
Forza tangenziale/assiale:
18/05/2009
43
DIMENSIONAMENTO
SISTEMA DI ROTAZIONE VERTICALE (6/6)
d m1 := diametro passo della vite senza fine
α 0 = 20°
Coefficiente di attrito acciaio-bronzo, secchi, al primo distacco
µ = 0.25
( dm1 + dm2 )
Interasse nominale
ai =
Modulo
m=
Lunghezza consigliata della vite
Lunghezza consigliata del dente della ruota dentata
Momento torcente agente sulla ruota dentata
Angolo di pressione al contatto
Angolo di pressione normale al dente
d a1 := diametro complessivo della vite senza fine
z1 := numero di avvii della vite senza fine
z2 := numero di denti della ruota dentata
2
( d m1 − da1 )
q=
2
dm1
m
b1 ≅ 2.5 m ⋅ z2 + 1
b2 ≅ 2m ⋅ (0.5 + q + 1)
M T 2 = foggetto ⋅ boggetto
z1
q
Z2
R=
Z1
γ m = arctan
ϕ := 2 ÷ 3
Angolo di attrito (a seconda della più o meno accurata lavorazione)
Rendimento della coppia “vite senza fine-ruota dentata”
d m 2 := diametro passo della ruota dentata
Come realizzare un braccio robotico
Progettazione e Realizzazione Meccanica
Angolo di pressione primitivo “vite senza fine-ruota dentata”
Coefficiente di forma
Prof. N. Alberto Borghese – Dott. Paolo Tirelli
Z2
Z1
18/05/2009
R=
Rapporto di trasmissione
η=
tan γ m
tan (γ m + ϕ )
α n = arctan ( tan α 0 ⋅ cos γ m )
44
DIMENSIONAMENTO
SISTEMA DI TRASLAZIONE (1/5)
Prof. N. Alberto Borghese – Dott. Paolo Tirelli
Il sistema di traslazione deve essere in grado di sollevare l’intero
sistema di rotazione considerando il caso in cui sia stato afferrato
un oggetto. Ovvero, suddividendo le parti in esame, le masse da
considerare, le relative forze peso, saranno, nell’ordine elencato di
seguito, quelle del contrappeso, della scatola del sistema di
rotazione verticale, del link orizzontale, del polso e pinza
(considerati in questo caso un tutt’uno) e dell’oggetto da sollevare.
La forza peso generata è data dalla formula:
Fsist .rot . = Fcontrappeso + Fscatola + Flink _ orizz . + Fpolso _ pinza + Foggetto
Come realizzare un braccio robotico
Progettazione e Realizzazione Meccanica
Passiamo ora ad analizzare la coppia necessaria affinché il braccio
sia in grado di traslare lungo i link verticali.
18/05/2009
Bisogna inoltre tenere conto delle forze di attrito presenti tra le
ruote della scatola ed i binari in cui queste scorrono:
Fattrito
45
DIMENSIONAMENTO
SISTEMA DI TRASLAZIONE (2/5)
La coppia generata dalle forze di attrito volvente è:
'
: Forza peso generata dalle masse da sollevare
R ⋅η
: Raggio della ruota del sistema di traslazione
Per quanto riguarda il calcolo della coppia generata dall’attrito tra la
vite senza fine e la ruota dentata rifarsi alle slide precedenti:
Cµ _ ele
Prof. N. Alberto Borghese – Dott. Paolo Tirelli
Abbiamo ora tutti i dati necessari a calcolare la coppia totale che
il motore del sistema di traslazione deve generare:
CTotale _ ele = Cµ _ ele + Cinerzia _ ele + Ccompensazione _ ele + Cµ' _ ele
Il calcolo delle potenze in gioco avviene come visto in precedenza.
Come realizzare un braccio robotico
Progettazione e Realizzazione Meccanica
Cµ _ ele =
Fv _ ele ⋅ bruota
18/05/2009
46
DIMENSIONAMENTO
SISTEMA DI TRASLAZIONE (3/5)
Prof. N. Alberto Borghese – Dott. Paolo Tirelli
Secondo questa configurazione la forza peso del
sistema di rotazione, di cui risente il sistema di
traslazione, è dimezzata.
Come realizzare un braccio robotico
Progettazione e Realizzazione Meccanica
Il sistema di traslazione è realizzato mediante l’uso di tre
carrucole che consentono al filo di scorrere.
18/05/2009
47
DIMENSIONAMENTO
SISTEMA DI TRASLAZIONE (4/5)
La prima cosa da calcolare è dunque la coppia di compensazione
del sistema di traslazione:
Prof. N. Alberto Borghese – Dott. Paolo Tirelli
Fp / 2 =
Fsist _ rot
2
Ccompensazione _ ele =
Fp / 2 ⋅ bruota
R ⋅η
L’inerzia del sistema di traslazione è data da:
2
J sist _ ele
1
= ⋅ ( J albero _1 + J ingranaggio + J ruota ) + J albero _ 2 + J vite + J motore _ ele
R
A questo punto, come visto in precedenza, è possibile, scelta la
velocità a cui si desidera compiere la traslazione, calcolare la coppia
necessaria a vincere l’inerzia del sistema:
Cinerzia _ ele
Come realizzare un braccio robotico
Progettazione e Realizzazione Meccanica
Questa particolare configurazione ha il vantaggio di dimezzare la
forza peso, ma, a parità di tempo, lo spazio percorso dalla
traslazione è anch’esso dimezzato.
18/05/2009
48
DIMENSIONAMENTO
SISTEMA DI TRASLAZIONE (5/5)
Prof. N. Alberto Borghese – Dott. Paolo Tirelli
L’attrito si sviluppa lungo i link verticali, dato dal rotolamento
delle ruote lungo i binari (attrito volvente) e tra la vite senza fine
e la ruota dentata.
L’attrito volvente si presenta quando un corpo cilindrico o una
ruota, rotola senza strisciare su di una determinata superficie.
Le forze che generano attrito volvente sono dirette
perpendicolarmente ai due link verticali e sono generate dalla
pressione delle ruote sui binari.
Le forze di attrito volvente sono dunque date dalla formula:
Fv _ ele = µv ⋅ F⊥
F⊥:= rappresenta la forza perpendicolare al piano di appoggio
µv := rappresenta il coefficiente di attrito viscoso
La coppia generata dalle forze di attrito volvente è:
Cµ' _ ele =
Fv _ ele ⋅ bruota
R ⋅η
Come realizzare un braccio robotico
Progettazione e Realizzazione Meccanica
Rimangono da calcolare le coppie derivanti dalle forze di attrito.
18/05/2009
49
DIMENSIONAMENTO
SISTEMA POLSO (1/3)
Iniziamo definendo la coppia di compensazione pari a 0, in quanto
la pinza, che stringe l’oggetto, è fissata al polso per mezzo di un
asse di rotazione ed è quindi vincolata sia nel momento in cui è
stato afferrato un oggetto sia in caso contrario.
Prof. N. Alberto Borghese – Dott. Paolo Tirelli
Ccompensazione _ p = 0
Le sole coppie che restano da calcolare sono dunque la coppia
necessaria a vincere l’inerzia della pinza (maggiorata dalla
presenza di un oggetto tra le dita) e la coppia necessaria a vincere
l’attrito tra la vite e la ruota dentata.
Come realizzare un braccio robotico
Progettazione e Realizzazione Meccanica
Doppiamo calcolare la coppia risultante che il motore deve
vincere.
18/05/2009
50
DIMENSIONAMENTO
SISTEMA POLSO (2/3)
L’inerzia del sistema è pari a:
2
Prof. N. Alberto Borghese – Dott. Paolo Tirelli
Rappresentando la struttura della pinza come un parallelepipedo,
l’inerzia risultante è data dalla formula:
J inerzia _ pinza
1
= ⋅ m pinza ⋅ ( b 2 + c 2 )
12
Rappresentando l’oggetto stretto dalla pinza come una sfera
piena, la sua inerzia risulta:
: massa sfera
2
2
J oggetto = ⋅ moggetto ⋅ roggetto
5
: raggio sfera
Come realizzare un braccio robotico
Progettazione e Realizzazione Meccanica
J inerzia _ p
1
= ⋅ ( J inerzia _ pinza + J oggetto + J ingranaggio ) + J motore + J vite
R
18/05/2009
51
DIMENSIONAMENTO
SISTEMA POLSO (3/3)
Prof. N. Alberto Borghese – Dott. Paolo Tirelli
Cinerzia _ p = J inerzia _ p ⋅ α p
Il calcolo delle potenze in gioco avviene come visto in precedenza.
Come realizzare un braccio robotico
Progettazione e Realizzazione Meccanica
Per quanto riguarda l’inerzia della ruota dentata, è sufficiente
rifarsi al caso già considerato in precedenza.
Una volta stabilita la velocità desiderata, e la conseguente
accelerazione necessaria (p), per ottenere la coppia necessaria a
ruotare il polso è sufficiente applicare la formula:
18/05/2009
52
DIMENSIONAMENTO
SISTEMA PINZA
Prof. N. Alberto Borghese – Dott. Paolo Tirelli
La scelta è stata un compromesso tra la velocità di chiusura e la
forza della presa.
Sono quindi possibili diverse soluzioni, tutte plausibili, a seconda
del tipo di utilizzo che si intende fare del braccio robotico.
Come realizzare un braccio robotico
Progettazione e Realizzazione Meccanica
Per il dimensionamento del motore della pinza si è preferito non
eseguire alcun tipo di calcolo specifico.
18/05/2009
53
DIMENSIONAMENTO
IL CONTRAPPESO (1/4)
Prof. N. Alberto Borghese – Dott. Paolo Tirelli
uur ur r
M = F ∧r
Come realizzare un braccio robotico
Progettazione e Realizzazione Meccanica
Il braccio robotico si basa sulla struttura delle più comuni
gru che trovano applicazione nell’edilizia.
Compito del contrappeso è compensare il momento
generato dallo sbraccio, affinché il sistema non sollecitato
permanga in uno stato di equilibrio (equilibrio stabile).
Si definisce momento di una forza, rispetto ad un punto di
riferimento O, il prodotto vettoriale del vettore forza per il
vettore posizione.
18/05/2009
54
DIMENSIONAMENTO
IL CONTRAPPESO (2/4)
Prof. N. Alberto Borghese – Dott. Paolo Tirelli
Applichiamo due forze f1 ed f2, di uguale intensità, alle due
estremità opposte dell’asta, rispettivamente nell’angolo in basso a
sinistra ed in quello in basso a destra (a).
A questo punto, se al sistema non viene applicata alcuna ulteriore
sollecitazione, questo si stabilizzerà alla situazione di equilibrio.
Come realizzare un braccio robotico
Progettazione e Realizzazione Meccanica
Supponiamo di avere una asta di lunghezza e spessore noti e il cui
peso sia uniformemente distribuito lungo tutto il corpo. Foriamo
l’asta nel centro, e fissiamola ad un perno in modo che sia libera
di ruotare su esso come se fosse l’elica di un aeroplano.
18/05/2009
55
DIMENSIONAMENTO
IL CONTRAPPESO (3/4)
Questa operazione determina una differenza tra i valori dei due
momenti in gioco e, di conseguenza, pone il sistema in uno stato di
non equilibrio.
Come realizzare un braccio robotico
Progettazione e Realizzazione Meccanica
Prof. N. Alberto Borghese – Dott. Paolo Tirelli
Adesso supponiamo di perturbare il sistema, sollevando l’asta (b).
18/05/2009
56
DIMENSIONAMENTO
Applicando la teoria al braccio robotico:
Da cui:
∑ m ⋅b = b ⋅∑ m
i
i
i
g
i
i
f c ⋅ bc = f l ⋅ bl + f p ⋅ b p
ll
lp
fl ⋅ + f p ⋅ ll +
2
2
mc ⋅ g =
lc
2
Che tipo di struttura si desidera realizzare? La scelta è tra un
contrappeso più vicino al punto di rotazione del braccio ma di peso
superiore ad un contrappeso posto più lontano dal punto di
rotazione del braccio ma di peso inferiore.
Rimane da decidere dove localizzare il contrappeso.
Come realizzare un braccio robotico
Progettazione e Realizzazione Meccanica
18/05/2009
Prof. N. Alberto Borghese – Dott. Paolo Tirelli
IL CONTRAPPESO (4/4)
57
REALIZZAZIONE MECCANICA
PROFILATI DI ALLUMINIO (1/3)
Profilati verticali:
Flessione
Produttore
1300 mm
400 mm
200 mm
Alluminio (Al), anodizzato
0,91 Kg/m
0,60 mm applicando una forza di 50.0 N
(Fig. 22,c)
ITEM
Momento Flettente
Come realizzare un braccio robotico
Progettazione e Realizzazione Meccanica
Lunghezza
Larghezza
Spessore
Materiale
Peso specifico/lunghezza
Prof. N. Alberto Borghese – Dott. Paolo Tirelli
18/05/2009
58
REALIZZAZIONE MECCANICA
PROFILATI DI ALLUMINIO (2/3)
Profilato orizzontale:
Flessione
Prof. N. Alberto Borghese – Dott. Paolo Tirelli
Produttore
900 mm
200 mm
200 mm
Alluminio (Al), anodizzato
0,51 Kg/m
21,17 mm applicando una forza di 50.0 N
(Fig. 22,a)
ITEM
Come realizzare un braccio robotico
Progettazione e Realizzazione Meccanica
Lunghezza
Larghezza
Spessore
Materiale
Peso specifico/lunghezza
18/05/2009
59
18/05/2009
Profilati alla base:
Come realizzare un braccio robotico
Progettazione e Realizzazione Meccanica
60
Prof. N. Alberto Borghese – Dott. Paolo Tirelli
REALIZZAZIONE MECCANICA
PROFILATI DI ALLUMINIO (3/3)
REALIZZAZIONE MECCANICA
RUOTA DENTATA E VITE SENZA FINE (1/2)
Consente un elevato rapporto di riduzione.
Non reversibilità del moto
Modulo e numero di avvii devono coincidere.
Prof. N. Alberto Borghese – Dott. Paolo Tirelli
Ruota dentata
Diametro complessivo
Diametro passo
Diametro punzone
Lunghezza totale
Modulo
Numero di avvii
Numero di denti
43 mm
40.09 mm
26 mm
20 mm
1.0
1
40
Vite senza fine
Diametro complessivo
Diametro passo
Lunghezza totale
Modulo
Numero di avvii
Tipo e dimensione della filettatura
18 mm
16 mm
32 mm
1.0
1
M4
Come realizzare un braccio robotico
Progettazione e Realizzazione Meccanica
Realizza la trasmissione del moto tra due assi perpendicolari.
18/05/2009
61
18/05/2009
Come realizzare un braccio robotico
Progettazione e Realizzazione Meccanica
62
Prof. N. Alberto Borghese – Dott. Paolo Tirelli
REALIZZAZIONE MECCANICA
RUOTA DENTATA E VITE SENZA FINE (2/2)
REALIZZAZIONE MECCANICA
BASE DI COMPENSATO
Prof. N. Alberto Borghese – Dott. Paolo Tirelli
400 mm
400 mm
10 mm
Legno compensato
Come realizzare un braccio robotico
Progettazione e Realizzazione Meccanica
Lunghezza
Larghezza
Spessore
Materiale
18/05/2009
Base di compensato
63
REALIZZAZIONE MECCANICA
SISTEMA DI TRASLAZIONE (1/3)
Prof. N. Alberto Borghese – Dott. Paolo Tirelli
La ruota è stata poi inserita all’interno di una gabbia metallica a
ricreare la struttura di una carrucola da fissare alla base del
braccio.
Il moto alla ruota è indotto tramite l’accoppiamento “vite senza
fine-ruota dentata”.
Attorno alla ruota è stato avvolto un filo Spectra® fiber di sezione
inferiore al millimetro in grado di sopportare un peso di circa 30
Kg.
Come realizzare un braccio robotico
Progettazione e Realizzazione Meccanica
Realizzato con una ruota da tapparella.
18/05/2009
64
REALIZZAZIONE MECCANICA
SISTEMA DI TRASLAZIONE (2/3)
La scatola, unico componente direttamente collegato al sistema di
traslazione, si presenta con una struttura a tre lati:
Sul lato superiore è montata la carrucola.
Sui due lati paralleli ai link verticali sono presenti otto ruote,
quattro per lato, le quali scorrono sui i binari presenti lungo i
link verticali stessi.
Alla struttura è consentito solo di salire e scendere.
Come realizzare un braccio robotico
Progettazione e Realizzazione Meccanica
Prof. N. Alberto Borghese – Dott. Paolo Tirelli
18/05/2009
65
REALIZZAZIONE MECCANICA
SISTEMA DI TRASLAZIONE (3/3)
Prof. N. Alberto Borghese – Dott. Paolo Tirelli
P = ω ⋅C
Cmotore ⋅ vmotore = Cruota ⋅ vruota
Cruota = Cmotore ⋅ R
vruota
v
= motore
R
P := potenza
ω := velocità angolare
C := coppia motore
Cmotore := coppia motore
vmotore := velocità motore
Cruota := coppia ruota
vruota := velocità ruota
R := rapporto di riduzione
Come realizzare un braccio robotico
Progettazione e Realizzazione Meccanica
Le dimensioni della ruota influenzano la scelta del motore.
La dipendenza della coppia motore dal braccio della ruota è già
stata formulata.
La relazione tra coppia e velocità è:
18/05/2009
66
REALIZZAZIONE MECCANICA
SISTEMA DI ROTAZIONE VERTICALE (1/2)
Prof. N. Alberto Borghese – Dott. Paolo Tirelli
Come realizzare un braccio robotico
Progettazione e Realizzazione Meccanica
Basato sull’accoppiamento “vite senza fine-ruota dentata” e sul
concetto di equilibro stabile.
Un punto x0 si dice punto di equilibrio stabile se il sistema ritorna
allo stato di equilibrio dopo una piccola perturbazione.
La struttura è composta da un link orizzontale che termina nel
polso, a sua volta collegato alla pinza.
Il tutto è bilanciato da un contrappeso.
In condizioni di equilibrio stabile il baricentro è situato tra i due
link verticali, in corrispondenza della scatola.
18/05/2009
67
REALIZZAZIONE MECCANICA
SISTEMA DI ROTAZIONE VERTICALE (2/2)
Consente, per un ampio arco di circonferenza, di mantenere il
polso e la pinza paralleli al suolo.
Come realizzare un braccio robotico
Progettazione e Realizzazione Meccanica
Prof. N. Alberto Borghese – Dott. Paolo Tirelli
Caratteristica del sistema di rotazione è la struttura a pantografo.
18/05/2009
68
REALIZZAZIONE MECCANICA
SISTEMA POLSO
Prof. N. Alberto Borghese – Dott. Paolo Tirelli
Collegato direttamente alla struttura a pantografo.
Mantiene la propria posizione parallela al suolo
Come realizzare un braccio robotico
Progettazione e Realizzazione Meccanica
La struttura è realizzata mediante barrette di metallo poste a
formare una gabbia, all’interno della quale è situata una coppia
“vite senza fine-ruota dentata”.
18/05/2009
69
REALIZZAZIONE MECCANICA
SISTEMA PINZA
Prof. N. Alberto Borghese – Dott. Paolo Tirelli
Come realizzare un braccio robotico
Progettazione e Realizzazione Meccanica
Struttura costituita da una basetta di alluminio, rinforzata con
barrette metalliche.
Le dita della pinza sono realizzate con parti dei binari di un
normale cassetto, alle cui estremità è fissato un uncino.
Un dito della pinza è fissato alla basetta, mentre l’altro, mobile, si
presenta con la base collegata ad un binario, mentre al centro è
perpendicolarmente attraversato da una vite su cui scorre.
La rotazione è indotta da una coppia di ingranaggi posti a
collegamento tra la vite ed il motore
18/05/2009
70
REALIZZAZIONE MECCANICA
IL CONTRAPPESO
Prof. N. Alberto Borghese – Dott. Paolo Tirelli
Come realizzare un braccio robotico
Progettazione e Realizzazione Meccanica
Posto lungo il medesimo asse su cui è situato il link orizzontale e
quindi la pinza, ma all’estremità opposta rispetto al baricentro del
sistema di rotazione.
Consiste in una gabbia metallica al cui interno prende posto la
batteria.
A seconda del peso della pinza e delle batterie può essere
necessario compensare il contrappeso con dei dischi di ghisa in
modo tale da mantenere l’equilibrio stabile.
18/05/2009
71
18/05/2009
Come realizzare un braccio robotico
Progettazione e Realizzazione Meccanica
72
Prof. N. Alberto Borghese – Dott. Paolo Tirelli
IL BRACCIO NEL SUO COMPLESSO
DIMENSIONI
18/05/2009
Come realizzare un braccio robotico
Progettazione e Realizzazione Meccanica
73
Prof. N. Alberto Borghese – Dott. Paolo Tirelli
IL BRACCIO NEL SUO COMPLESSO
Progettazione e realizzazione di un braccio robotico, Tirelli Paolo
http://www.wikipedia.org/
18/05/2009
Come realizzare un braccio robotico
Progettazione e Realizzazione Meccanica
Prof. N. Alberto Borghese – Dott. Paolo Tirelli
RIFERIMENTI
74