ESERCITAZIONE 1 FONTI ENERGETICHE RINNOVABILI (FER, FES):
Si generano spontaneamente, generano sostanzialmente emissioni nulle, tutte hanno origine dal
sole; sono: eolica,solare, geotermica, moto ondoso, maremotrice, idraulica, biomasse, gas di
discarica. Le discontinuità delle FER sono legate alla discontinuità di forniture all’utente e dal
rischio di instabilità della rete ecco perché alla penetrazione delle FER è legato il concetto di
accumulo come intermediario nel collegamento con la rete. Analizziamo l’energia elettrica da fonte
eolica: nel mondo raggiunge i 197 GW mentre quella italiana è 5,8GW. Qui si trasforma l’energia
del
vento
in energia
meccanica della turbina, a
meno di perdite nella turbina
eolica.
Di
solito
il
generatore viaggia a velocità
superiori rispetto a quelle
della turbina eolica, ecco
perché si mette un riduttore
o un amplificatore delle
velocità il riduttore in
quanto organo meccanico,
ha dei rendimenti che
lasciano delle perdite, mi
piacerebbe eliminarlo. I
controlli si effettuano sulle turbine eoliche tramite dispositivi meccanici, mentre sul generatore
elettrico tramite convertitori elettronici di potenza. Il parametro più rilevante è la velocità del vento
che è funzione sia della quota sia del periodo dell’anno. Le
rilevazioni le faccio con anemometri. Il profilo della
velocità come ci ricorda la fluidodinamica è quello in figura
per cui il miglio comportamento per le pale, lo si ottiene
con un regime di velocità alto. Inoltre bisogna considerare
che le pale iniziano a muoversi quando il vento raggiunge
la velocità minima di avvio (cut-in wind speed). Le soglie
di cut-in sono variabili in funzione della taglia del
generatore: di solito per l'avvio di aerogeneratori di
piccolissima taglia sono sufficienti velocità del vento molto
basse, anche soltanto di 2-3 metri al
secondo. Tuttavia non è sbagliato pensare
ad impianti non così piccoli per cui le pale
sotto ai 3 m/s non si muovono lasciando
l’impianto spento. E’ da segnalare la
potenza nominale che si raggiunge con la
velocità di circa 13-14 m/s che segna
anche il
massimo
comportamento
ottenibile
dal
generatore.
Infatti
all'aumentare della velocità del vento
corrisponde un progressivo aumento della
potenza istantanea erogata dalla macchina,
fino al raggiungimento della velocità nominale (rated wind speed), cioè della velocità del vento
nella quale il generatore raggiunge la potenza di targa. Il picco di potenza erogata rimane costante
fino alla soglia massima (cut-out wind speed) di velocità del vento tollerata dalla macchina. Oltre
questa soglia, il generatore smette di produrre energia e si mette in sicurezza, ricorrendo a sistemi
attivi o passivi di protezione, al fine di evitare danni alle componenti meccaniche. Calcolo
dell’energia prodotta in un anno:
P(vi) = potenza (kW) erogata dal generatore eolico in corrispondenza della velocità del vento v i;
8760 = numero di ore in un anno;
PRINCIPI FISICI:
W = ½ ρτν2 [J] esprime l’energia cinetica di un volume elementare in moto, con ρ = densità di
massa. La distribuzione di velocità di
un
moto
laminare,
fluido
incomprimibile e con interazione nulla
col fluido confinante si rappresenta
come in figura. L’energia estratta sarà
la differenza tra i quadrati delle
velocità con τ = Ar*ν*Δt; invece la
potenza sarà P = ΔW / Δt ricavandola
dalla formula di prima. Per quanto
riguarda le condizioni di massima
potenza estraibile, questa (grazie al
teorema di Betz) risulta essere pari a
Infatti
Questa equazioni rappresenta la partenza del bilancio energetico. Si può notare come esprima la
variazione di energia cinetica tra ingresso ed uscita nell’unità di tempo. Infatti la relazione sarebbe
P = (½ mv2)/t con m/t = portata massica che si può esprimere con la relazione ρ*A*v con ρ =
densità di massa che in questo caso specifico risulta costante per ipotesi di esperimento in quanto
abbiamo un tubo infinito che riesce a contenere tutto la massa di vento senza perdite, A = scelgo la
sezione con le pale per risulta essere l’unica comoda poiché almeno in parte nota, v = la velocità
determinata dalla sezione scelta e quindi v 1.
Per quanto riguarda il secondo bilancio la quantità di moto bisogna considerare la quantità entrante
e quella uscente (come al solito) determinando il valore di T opportunamente definito come
variazione della quantità di moto. A questo punto bisogna moltiplicare tale vettore per la velocità v1
poiché stiamo considerando di posizionarci nella sezione della pala eolica come in precedenza. Ora
con una semplice operazione di sostituzione si ottiene il valore di v1 che risulta essere la media tra v
e v2 e per cui dovendo fare il massimo, si deve procedere con l’utilizzo della derivata della potenza
rispetto a v2 ottengo v2 = v/3; v1 = 2v/3 e la Pmax indicata.
Per quanto riguarda il coefficiente di Potenza (Prestazione) si ha l’equazione valida :
cp = potenza estratta / potenza disponibile = che come valore massimo assume 16/27
Tipi di pale:
ad asse orizzontale: cioè con pala singola, doppia o tripla queste hanno differenze x le
velocità ottimali che si riduce più aumenta il numero di pale, ma cresce la complessità dei
collegamenti e delle sollecitazioni all’albero, inoltre attenzione al cambio di direzione del
vento poiché bisogna regolare l’asse di rotazione in base ai suoi spostamenti;
ad asse verticale: non hanno problematiche legate alla direzione del vento.
Esiste la velocità di cut-in perché c’è bisogno di una certa portanza, invece la cut-out rappresenta la
velocità che rappresenta un limite meccanico oltre il quale tale pala si romperebbe. So che la
relazione tra potenza e velocità è una relazione cubica, per cui aumentando la velocità , mi aumenta
molto la potenza; potenza che però risulta legata anche alla corrente che , a parità di potenziale , di
fronte ad un aumento cubico della potenza, si trova a dover aumentare molto andando ad inficiare
sulla sicurezza dei fili con l’effetto joule. Bisognerà fare attenzione al controllo:
Come elementi delle pale eoliche si hanno il rotore, generatore, il moltiplicatore di giri, alberi veloci
e lenti, e tutti i dispositivi per i sistemi di controllo.
I sistemi di regolazione e controllo
Tutti i generatori eolici possiedono sistemi più o meno sofisticati di regolazione e controllo, in
grado di adeguare istantaneamente le condizioni di lavoro della macchina al variare della velocità e
della direzione dei venti. I generatori eolici inoltre sono dotati di sistemi frenanti e di altri
meccanismi che proteggono il buon funzionamento e l'integrità della turbina in caso di vento
eccessivo.
La regolazione di imbardata
L'imbardata è la rotazione della turbina intorno al proprio asse verticale, indispensabile per
posizionare il rotore secondo la direzione del vento, assolutamente da evitare il disallineamento. Il
controllo dell'imbardata contribuisce anche a regolare la potenza prodotta.
I due principali sistemi di controllo e regolazione dell'imbardata sono:
• Regolazione attiva dell'imbardata: le turbine di media e grande taglia sono dotate di un
sofisticato servomeccanismo, regolato da un anemometro, che garantisce l'allineamento ottimale tra
l'asse del rotore e la direzione del vento.
• Regolazione passiva dell'imbardata: per orientare la navicella in base alla direzione del vento, le
turbine di piccola taglia sono dotate di un semplice timone (o banderuola) direzionale
Il controllo della potenza (Blade Pitch Control)
• Passivo: definito α angolo di attacco, se questo risulta grande si ha la rotazione delle pale, ed
essendo un controllo passivo, non ha un attuatore per cui per aumentare l’angolo deve aumentare la
velocità del vento;
• Attivo : qui c’è la possibilità di orientare le pale per modificare il profilo del vento creato. Quando
si crea il vuoto detto stallo allora inizia a ruotare ma sarà il dispositivo da me controllato a gestire
l’orientamento delle pale. Con lo stallo si crea la turbolenza necessaria alla rotazione. Si capisce
anche la relazione inversa tra α e β infatti α è l’angolo tra la risultante e la l’asse delle pale
mentre β è l’angolo tra l’orizzontale del vento e l’asse delle pale.
Per avere uno studio più preciso devo introdurre anche
questo parametro a dimensionale che a parità di v, mi
cresce insieme ad ω che rappresenta la velocità di rotazione
della pala; risulta evidente dunque che se aumenta il
numero di pale, diminuisce molto λ. Si possono ottenere
due grafici come quelli sotto in cui si nota che il monopala
avrà bisogno di grandi velocità e grandi λ per poter avere il
massimo del cp. Dato che col tri pala si ottiene un cp = 0,45
con la necessità di λ = 5-6, noto che col multi pala ottengo
lo stesso cp con λ = 1-2. Bisogna fare un focus con 3
grafici che aumentano sempre la loro specificità.
Il primo rappresenta
alcune
differenti
tipologie di pale che
variano il cp al variare
di λ. Già da questo
grafico si intuisce la
bontà dei tripala che
presentano un buon
compromesso tra cp e λ.
In questo grafico si
evidenzia l’andamento
dei valori assunti da cp
ottimo (limite di Betz) e
il valore dei differenti cp
in funzione sia della
tipologia di tecnologia
utilizzata ma anche dei
valori di λ. Si va ad
evidenziare il valore di
λopt che rappresenta
proprio il valore in
corrispondenza del cp max
della tecnologia.
Nel terzo grafico si
evidenzia l’andamento
dei valori assunti da cp ,
ma sempre all’interno
della tecnologia del
tripala. Si può leggere in
tutte le direzioni
(partendo da β per
trovare λ o viceversa).
Se partissimo da un λ
fissato, troverei una
specifica campana di
comportamento
tracciando un verticale. Ecco che si trovano a parità di λ dei cp crescenti al diminuire di β (che sono
gli angoli segnati sul grafico)
CONVERSIONE IN FORMA ELETTRICA DELL’ENERGIA MECCANICA:
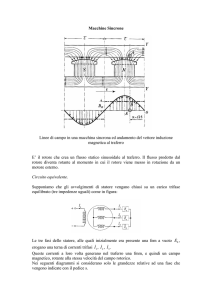
1. GENERATORI SINCRONI
composto da 3 elementi statore (resta fermo); rotore (si muove); traferro (spazio tra statore e
rotore, spesso è dell’aria). Si hanno alcune tipologie di macchine sincrone che sono:
con 1 coppia di poli:
i due verdi sono avvolgimenti
induttori,
mentre gli
altri
rappresentano
quelli
dell’indotto per cui si rispetta
l’ipotesi iniziale di parità delle
coppie polari tra rotore e statore.
Il rotore lavora in CC, mentre lo
statore in CA. Il campo induttore
ruota con velocità angolare ω del
rotore pari alla ωm detta anche
velocità di sincronismo. Quelle
indicano
le
fasi
degli
avvolgimenti e basta derivarli
rispetto alla velocità angolari per ottenere le tensioni indotte sugli stessi.
Con 2 coppie di poli:
si hanno due tipologie di macchine come a poli lisci, o a poli salienti. Nella prima l’avvolgimento di
campo è disposto nelle cave sul rotore; nella seconda invece bisogna segnalare la presenza di assi
polari (con traferro minimo) ed interpolari (con traferro massimo); questa proprietà risulta
importante in quanto si riesce di conseguenza ad incanalare il flusso che è naturalmente portato ad
attraversare la regione che presenti meno traferro. In generale per le macchine si può definire la
frequenza della tensione indotta f = p * n/60 e ricavando n = numero di giri, si nota come con 3
coppie di poli, una frequenza di 50 Hz si ottengono 1000 giri/min.
A qualsiasi tipo di macchina, ci attacco un carico per cedergli energia e farlo funzionare. Questi
carichi possono essere monofase o trifase con diversi collegamenti come vediamo di seguito.
Carico AC monofase:
si parte dal sistema per trovare v(t), quella è l’equazione con i termini riferiti alla resistenza,
all’induttanza, e al condensatore. Ora posso considerare
l’insieme delle resistenze che si incontrano sul circuito
nel circuito equivalente con un‘impedenza Z al posto
delle resistenze. Questo significa mettere la I efficace al
posto della corrente normale e stesso discorso per il
potenziale. Bisogna sostituire alla i(t) la parte reale,
mentre per il resto ω = di/dt per cui Z = R per le resistenze, = jωL per le induttanze , = - j/ωC per
il condensatore; per cui come equazione finale si ottiene V = Z*I. Quindi la potenza assorbita da un
carico AC monofase si ottiene così : basta relazionare tramite l’arctg la parte immaginaria e la parte
reale dell’impedenza. Questo concorre alla formazione della potenza complessa NN = VI = P+jQ
, con P potenza attiva = VI * cos(φ), e Q potenza reattiva= VI sen(φ) che ne rappresentano le
componenti.
CARICO TRIFASE:
Ipotizziamo il caso con generatori di tensione E1,2,3 uguali, ma sfasati di 1/3 di periodo, si possono
utilizzare 2 tipologie di collegamenti:
1. Connessione a stella degli avvolgimenti:
Si ottengono le tensioni concatenate, ma non si hanno disponibili le tensioni di fase
La prima rappresenta la relazione standard tra tensioni concatenate e tensioni di fase. Inoltre si
potrebbe calcolare la potenza attiva intendendola come la somma di cavi monofase con ritorno al
neutro per cui basta sommare le 3 potenze e si ottiene P = 3 E I cos (φ) = √3 V I cos (φ) [discorso
analogo per la potenza reattiva, solo col seno al posto del coseno]. La seconda equazione invece, è
ottenuta con la formula di Eulero secondo la quale V = raggio del segmento (in questo caso è √3E)
moltiplicato l’esponenziale del complesso per l’argomento (in questo caso j*π/6).
2. Connessione a triangolo degli avvolgimenti:
Da notare il collegamento testacoda tipico del triangolo e la
coincidenza
tra
tensioni
concatenate e quelle di fase.
In questa altra rappresentazione si mostra il circuito equivalente con al posto
di R, C, L delle impedenze Z generiche. Come nel caso del collegamento a
stella, la potenza totale è la somma dei tre collegamenti che si possono
intendere come singoli cavi monofase. Per cui risulta N = V12 * I1f + V23 *
I2f + V31 * I3f = 3VIfcos φ + 3VIfsen φ. Ovviamente il primo termine è
relativo alla potenza attiva P e il secondo è relativo alla potenza reattiva.
Inoltre si può ricordare la relazione secondo la quale I = √3 I f
3. Connessione a stella degli avvolgimenti con sistema trifase a 4 fili:
qui si hanno le tensioni concatenate diverse da quella di fase che coincidono
con le tensioni concatenate col neutro ( V1n= E1)
FUNZIONAMENTO
Il rotore della macchina è un elettromagnete che produce un'induzione B , che per la legge di BiotSavart risulta essere pari: Br = μ0 *i / 2πr, con andamento sinusoidale lungo la circonferenza che
racchiude completamente il rotore ( circonferenza di traferro). Ponendolo in rotazione con un
motore primo (es: turbina a vapore o idraulica), ottengo una velocità di rotazione ω m = velocità
rotazione delle pale (ovviamente a meno di riduttori), gli avvolgimenti situati nelle cave della
periferia interna di statore, sono sede, per la legge di Faraday-Lenz, di una fem indotta sinusoidale
dovute alle variazione di flusso. Infatti i 2 campi sono concatenati e quindi si attraversano. La sua
frequenza è proporzionale alla velocità di rotazione ed al numero di poli del campo induttore . la
fem sarà variante e trifase. La relazione generica è ω = p*ωm dove ωm è inteso come pulsazione di
chi induce; ma avendo p = costante allora le due velocità di rotazione di rotore e statore sono uguali
definizione di macchina sincrona. Se lo statore alimentasse un carico, allora lo stesso carico
avrebbe una corrente trifase con pulsazione ω. Quindi ottengo un campo risultante di modulo
costante, ma sinusoidale, che garantisce l’effetto rotativo.
Il problema che si deve dunque risolvere nel funzionamento a carico della macchina sincrona è
quello di mantenere costante la tensione sul carico. Ciò si può ottenere intervenendo sulla corrente
di eccitazione, aumentandola adeguatamente in caso di carichi ohmico-induttivi e diminuendola in
caso di carichi ohmico-capacitivi. Quando è presente nel carico la componente resistiva, la
macchina deve erogare potenza attiva. Il campo magnetico di reazione in tal caso ritarda e produce
una coppia frenante sul rotore. Il motore primo deve allora equilibrare questa coppia resistente
producendo una coppia motrice. Ciò avviene mediante trasformazione dell'energia primaria che
alimenta il motore primo. La corrente di ogni fase genera un campo magnetico pulsante avente
distribuzione spaziale sinusoidale nell’ambito di una coppia di poli. Questa è la definizione di
campo magnetico rotante (di Galileo Ferraris del 1885).
Tenendo attaccata la turbina si ottiene una coppia motrice di origine meccanica, il che garantirebbe
la velocità di rotazione costante.
Pmac = C * ωm cioè la potenza elettrica generata se avessi una macchina ideale per rispondere
alla potenza elettrica richiesta dal carico;
ω = 2π / T n = # di giri al minuto = f * 60 / p . Considerando che l’obiettivo ragionevole
potrebbe essere con n compreso tra 500 e 750 giri al minuto, si otterrebbe un numero di
coppie polari compreso tra 4 e 6 (come ordine di grandezza).
AVVIAMENTO PER LE SINCRONE:
Significa imprimere la coppia tale per cui partendo da 0, si arriva alla potenza / velocità nominale.
Dato che il rotore per la tensione alternata non parte, si attacca una macchina asincrona per partire e
poi la si stacca collegando la tensione di alimentazione e inserito il carico meccanico utilizzatore. Si
usa per campi con rotazione precisa e stabile perché cresce la complessità, o come ad esempio, per
azionare carichi a velocità variabili, però alimentati da un convertitore statico.
1. Brushes: metto le spazzole, ma si usurano; se non mettessi nulla, il risultato sarebbe che
gli avvolgimenti del rotore si sarebbero avvolti sullo statore provocandone l’arresto;
2. Elettrotecnico: attacco al rotore in CC un altro rotore in CA trifase, in maniera coassiale.
Si ha una batteria attaccata allo statore che presenta un campo fermo. Il secondo rotore
viene messo in moto dal rotore primo, e induce un altro campo allo statore. Cosi si
inducono campi sinusoidali. Il motore per partire ha bisogno di due elementi : coppia
conferita dal vento; corrente continua garantita dalla presenza della batteria sul
circuito eccitatore. Si attacca un trifase coassiale al rotore di modo che iniziata la sua
rotazione, induca una corrente sul trifase, che se lo chiudo, genera corrente nell’
avvolgimento. Con questo sistema evito i contatti striscianti per me sono usura e
necessità di manutenzione. Inoltre si mette anche un regolatore di tensione tale da
modificare la forma dello statore. Il raddrizzatore può cambiare CC in AC e viceversa.
3.
È analogo al precedente, ora non c’è una batteria ma un circuito eccitatore pilota, e si hanno
3 elementi coassiali al rotore primo. C’è un magnete che induce un campo sullo statore che è
attaccato allo statore dell’eccitatrice si ottiene il circolo di prima.
Avendo l’obbligo della ωm costante in
quanto macchina sincrona, non si ottiene la
coppia massima per massimizzare la
potenza. Posso attaccare un convertitore
statico per lavorare con delle velocità di
rotazione non costanti e sfruttarle per la
potenza. Ecco perché spesso le sincrone
sono stand alone , oppure mediate da un
convertitore se collegate alla rete. La
macchina sincrona è adatta per grosse
dimensioni perché sono complesse e
necessitano di alte efficienze.
2) GENERATORI ASINCRONI:
avvolgimento induttore statorico che è in CA;
Statore : anche qui è bene definire il numero di giri n = f * 60/p, i suoi avvolgimenti sono
messi nelle cave che non devono portare a contatto gli avvolgimenti statorici con quelli
rotorici;
avvolgimento indutto rotorico che è in CA;
a gabbia : per ogni canale del rotore, si utilizzano barre di rame
(o di alluminio pressofuse) le cui testate sono chiuse ad anello;
a rotore avvolto : dato che nel primo modello sono necessarie alte resistenze all’avviamento,
ma basse resistenza a regime e che quindi generavano problematiche di bassi rendimenti a
regime, si utilizza questo schema, in modo più approfondito si affronterà con l’avviamento.
Questo tipo di motore è costituito
da un pacco di corone circolari di
lamiere magnetiche scanalato
come lo statore. L'avvolgimento
viene costruito in maniera identica
a quello di statore e i suoi
terminali fanno capo a tre anelli
coassiali con il rotore, sui quali
strisciano delle spazzole fisse
collegate ai morsetti rotorici. I
morsetti rotorici sono collegati ad
un reostato. Questo tipo di rotore
viene utilizzato per il motore
asincrono per poter regolare la
resistenza dei circuiti rotorici tramite la variazione dei reostati che venivano collegati in
serie agli avvolgimenti rotorici, aumentando la resistenza si migliora la coppia ai bassi
regimi. Variando la resistenza elettrica del reostato, infatti, si poteva aumentare la resistenza
dei circuiti rotorici spostando la coppia massima verso lo scorrimento unitario (s = 1 ⇒
rotore fermo), in modo da disporre in fase di avvio del motore della coppia di spunto
massima disponibile. Questo metodo serve ad avviare motori di medie dimensioni (10 -300
kW). Dopo la partenza del motore le resistenze reostatiche vanno staccate dopo aver
opportunamente cortocircuitato i circuiti rotorici. Attualmente i motori asincroni a rotore
avvolto sono applicati convenientemente, insieme ad inverter, in unità motrici o generatrici a
velocità variabile in cui l'intervallo di variazione della velocità è piccolo;il caso più tipico e
diffuso è quello dei generatori eolici.
FUNZIONAMENTO:
Ipotizzando di mettersi nel caso semplice di una spira e del campo magnetico per capire poi in
generale il funzionamento delle macchine: per la legge di Lenz una variazione di flusso induce 1
f.e.m. nella spira chiusa con circolazione di corrente (anche questa con andamento sinusoidale e
pulsazione ωo) con verso opposto alla sua causa originante, che in questo caso è il moto relativo e
rotatorio tra campo magnetico e spira. Per cui la spira è indotta dalla f.e.m. a girare nel verso del
campo rotante cioè con effetto motore; banalmente se girasse in modo sincrono (ovvero con le
velocità angolari coincidenti) allora si genererebbe una f.e.m. nulla, cosi come per la corrente
indotta, nulla anch’essa per la mancanza del moto relativo. E’ motore asincrono (detto anche motore
indotto) perché nel campo rotante c’è corrente indotta che può essere diversa da 0 solo perché le
due velocità sono diverse. Per cui definendo con ω la velocità angolare della generica spira, si
possono tre differenti comportamenti delle macchine che sono:
1. 0< ω < ωm , o σ<0 funzionamento da motore perché avrebbe coppia concorde col verso
del campo. In questo caso la macchina erogherebbe potenza meccanica assorbendo potenza
elettrica attiva con la rete;
2. ω > ωm , σ > 0 funzionamento da generatore perché avrebbe coppia opposta al verso del
campo. In questo caso la macchina erogherebbe potenza elettrica attiva verso la rete
assorbendo potenza meccanica;
3. ω < 0 , σ = 0 funzionamento da freno e si assiste alla dissipazione sia della potenza
meccanica che di quella elettrica. Inoltre si potrebbe scambiare solo potenza elettrica
reattiva con la rete.
COPPIA ELETTROMAGNETICA:
Potenza elettrica assorbita dal rotore che viene dissipata per effetto joule
Ce = -3 p/ ω *( V*E0/ Xs)*sen (σ) con σ = sfasamento tensione a vuoto E 0 rispetto la tensione V,
detto anche ANGOLO DI CARICO. Da qui si capisce perché c’è la relazione con i funzionamenti.
Per esempio nella macchina a poli lisci della macchina SINCRONA la coppia può essere negativa
(generatore) o positiva (motore). Per creare una variazione del flusso si potrebbe fermare uno a
scelta tra indotto e induttore, nella realtà si preferisce fissare l’induttore poiché questo viene
collegato alla rete , il che risparmierebbe una notevole complessità.
FUNZIONAMENTO INTUITIVO :
Si ha un campo rotante statorico che , agendo da induttore, serve a generare delle correnti indotte
nel rotore inizialmente a riposo di modo da far nascere una coppia motrice sul rotore stesso (campo
rotante rotatorio).
GRANDEZZE:
oltre al già noto numero di giri al minuto, è utile definire anche lo scorrimento s;
da cui si ottiene
da cui si ricava che nel caso di s = 0 si è in presenza di sincronismo , e nel caso di s = 1 si è in
presenza di spunto, ovvero con ω m = 0.
COPPIA IN FUNZIONE DELLO SCORRIMENTO:
s<0: qui ha funzione di generatore
0<s<1 : qui si ha funzione di motore
s>1 : qui si ha funzione di freno
COPPIA IN FUNZIONE DEI NUMERI DI GIRI :
Per i funzionamenti valgono i casi precedenti
con le analogie, in più da notare come con s=1
cioè lo spunto, la coppia massima è molto
maggiore per cui a volte è difficoltoso
l’avviamento.
Inseguimento della potenza massima:
Qui si può apprezzare come la
velocità per le macchine sincrone resti
costante per cui con velocità del vento
maggiori il suo potenziale non riesca a
crescere come dovrebbe; invece per
quanto riguarda le macchine asincrone
il profilo della velocità non resti
costante, ma cambia riuscendo quindi
a sfruttare meglio le eventuali
crescenti velocità del vento tramite
l’uso degli aerogeneratori. Tuttavia
l’oscillazione non è tanta, per cui c’è
poco margine su cui poter lavorare.
AVVIAMENTO:
Solitamente c’è un reostato che è costituito da rotore avvolto, spazzole, resistenze variabili. Avere
alte resistenze consente un aumento dell’ impedenza e 1 calo della corrente assorbita dal motore all’
avviamento, ma anche una riduzione dello sfasamento delle correnti rotoriche e quindi un aumento
della coppia di avviamento e le sue velocità. Il secondo grafico spiega il funzionamento del rotore
avvolto con l’azionamento iniziale dello statore che porta ad una variazione della coppia, poi c’è
oscillazione dovuta al progressivo stacco del stesso tramite opportune modalità che sono primo
tratto reostato inserito, secondo e terzo tratto reostato parzialmente inserito, quarto tratto reostato in
cortocircuito.
Detta in parole povere :
Funzionamento: SINCRONO: eccitatrice che dà corrente all’avvolgimento del rotore. Il numero
delle coppie dei poli deve essere uguale tra statore e rotore. Questa corrente genera un campo
magnetico che inizia a girare x il rotore messo in moto dalla turbina eolica. Il campo magnetico del
rotore è rotante e sinusoidale (con definite quindi le fasi e le tensioni) e induce una fem ai capi
degli avvolgimenti di statore con velocità angolare uguale ma quindi sullo statore abbiamo la
rete collegata anche in modo diretto, e che avrà dei vincoli di velocità perché bisogna avere le
velocità uguali ω = ωm / p ( numero di poli). Ma probabilmente nella realtà potrò non avere
bisogno di velocità costanti, ma avrò bisogno di frequenze e velocità diverse perché magari soffia
molto vento. Il campo di statore visto dal rotore avranno stessa ω in quanto sincrono l’eccitatrice
induce un campo che sveglia il rotore, che induce un campo che sveglia lo statore che a sua volta
induce un campo che viene visto dal rotore e questo può essere concorde o discorde (per noi sempre
concorde) con quello del rotore . Ma il rotore x Lorenzt è portato ad accelerare perché concordi,
quindi uso l’aerogeneratore che avrà funzione frenante; la potenza meccanica fornita dalla pale è la
coppia meccanica per ωm ; mi ritrovo nel caso delle velocità del vento che non posso sfruttare se
non con un convertitore;
ASINCRONO: ora l’eccitatore è lo statore , e ho , come prima , la rete che dà ω uguali allo statore.
Ora viene indotta una fem sul rotore col trifase è in CA mentre prima era in CC. Ancora una volta
c’è l’azione della forza di Lorentz è sempre concorde , e la velocità di rotore è uguale a quello dello
statore. Rotore va ωm , e il campo va con ωc s = ωc – ωm / ωc .
s=1 spunto cioè partenza; s=0 cioè sincronismo ke elimina fem; 0<s<1 motore; o s<0 cioè m>c
generatore; s>1 funziona da freno.
Connessione alla rete:
Si utilizzano generatori sincroni (con funzione di generazione primaria) e generatori asincroni (con
funzione di supporto)
Per la regolazione del sistema si può fare riferimento alla caratteristica elettromagnetica dei
generatori a regime dal momento che le variazioni del vento avvengono in tempi molto lunghi
rispetto alle costanti di tempo caratteristiche dei generatori.
Variazione delle condizioni del vento a parità di profilo aerodinamico: la potenza meccanica
disponibile sull’asse del generatore è funzione della velocità del vento, ma anche della ω si
esprime tramite la relazione P = C*ω. Questo significa che sarà fissa (o variabile entro certi
intervalli) con accoppiamento diretto, libera con accoppiamento mediante convertitore di frequenza.
Conseguenza di ciò è la determinazione della velocità di cut-in del vento (3,6 m/s per le ASG; 3,8
per le SG) prima della quale le macchine fungono da motori e assorbono energia dalla rete. Nel caso
di accoppiamenti diretti le velocità di rotazione sono imposte dalla frequenza di rete e dalle
caratteristiche costruttive dei generatori, quindi non è possibile uno sfruttamento ottimale delle
“prestazioni” del vento.
Le macchine asincrone possono avere collegamento diretto, diretto rigido (poco in uso), con
convertitori. Per le macchine asincrone è utile ricordare l’influenza dello scorrimento nominale che
rappresentala rigidezza della caratteristica meccanica della macchina ed è influenzata da alcuni
fattori come la resistenza rotorica, l’induttanza rotorica, profilo delle barre o il numero di poli. Lo
scorrimento nominale può essere determinante nell’influenzare la risposta della macchina. Se
collegassimo l’ASG alla rete tramite convertitore, sarebbe possibile trovare la configurazione tale
per cui si riuscirebbe a sfruttare tutta la potenzialità del vento, variando anche la frequenza in modo
da ottenere una riduzione della potenza estratta nel range n>n n. Possono utilizzarsi anche
configurazioni con doppio convertitore i quali saranno caratterizzati da:
La potenza che attraversa il convertitore sul rotore è minore di quella che attraversa il
convertitore sullo statore;
Le perdite e il costo del convertitore sul rotore sono minori;
La capacità di regolazione della velocità è minore nel caso del doppio convertitore ( 30%
della velocità di sincronismo).
Passiamo dunque all’analisi dei convertitori elettronici di potenza e di quelli a commutazione.
CONVERTITORI ELETTRONICI DI POTENZA:
a sx: conversione con in convertitori;
a dx: invert o convertitore a commutazione;
I segnali che arrivano dall’esterno spesso sono armonici, e lo spettro di un segnale armonico
percepito dalla macchina è quello in figura sotto poiché c’è l’intervento dei filtri diodi e tiristori.
Come si può notare dallo
schema del filtro, in arrivo c’è
un segnale sinusoidale che
viene lavorato dal filtro per
poi uscire sottoforma di
segnale più regolare e meno
oscillante.
Questo nello specifico è
un diodo poiché ha 4
interruttori.
Convertitori statici:
circuiti comprendenti dispositivi semiconduttori che permettono un controllo sulle grandezze di out
rispetto a quelle di in. Ci sono 4 classi di convertitori:
CA – CC raddrizzatori ;
CC – CC inverter ;
CC – CC ;
CA – CA .
I componenti di potenza sono tre e sono diodo (conduzione ed interdizione sono controllate dal
circuito di potenza), tiristori (accesi con segnali di controllo ma spenti dal circuito di potenza),
componenti controllati sempre tramite circuiti di controllo. Materiale usato per i convertitori statici
è il silicio (4° gruppo, solido , tetravalente), che può essere drogato per raggiungere determinate
caratteristiche con elementi del 3° o del 5° gruppo. Infatti con la giunzione “p-n” si può creare
corrente con il passaggio degli e - e delle lacune da una parte all’altra.
Andiamo quindi prima ad analizzare i componenti che stanno all’interno dei convertitori, poi i
convertitori stessi.
DIODO:
Dispositivo a due terminali , anodo e catodo, costituito da un monocristallo di materiale
semiconduttore con 2 zone differenti per il drogaggio. Conduce corrente elettrica in un unico sen
so, con questa determinata caratteristica statica che la lega alla tensione applica che lo attraversa. In
questa abbiamo 2 zone: interdizione quando la tensione applicata è inversa (negativa), il diodo
non permette passaggio di corrente, solo una piccola corrente di perdita passa, ma è trascurabile;
conduzione con tensione applicata diretta (positiva), qui il diodo permette passaggio di corrente
dall’anodo al catodo. Da notare come la caduta del diodo è dell’ordine dei volt, mentre la tensione
di break down può arrivare a migliaia di volt, ecco perché si può approssimare. Quando si applica al
diodo una tensione inversa superiore a quella di break down il circuito esplode, e le prestazioni del
diodo sono la potenza massima che può essere dissipata in condizioni di sicurezza e la massima
tensione di break down.
TIRISTORE:
Il tiristore a due terminali o diodo
PNPN è un dispositivo a quattro strati di
semiconduttore di differente tipo; il
catodo è connesso alla regione p mentre
l’anodo a quella n. anche qui ci sono
diverse regioni: di interdizione inversa
analogo al diodo e non fa passare
corrente con tensione applicata inversa;
di indizione diretta con il diodo
polarizzato direttamente con una
tensione inferiore alla tensioni di
innesco Vt, permette il passaggio ci una
debole corrente di perdita diretta; di
conduzione –Z quando la tensione
supera quella di innesco, il tiristore si attiva e consente il passaggio di corrente con bassa cadute di
tensione. Una volta attivato il tiristore, resta tale fino a quando la corrente che lo attraversa resta
superiore alla corrente di mantenimento I m, dopo torna in stato interdetto e si riattiverà solo quando
la tensione torna ad essere superiore a Vt . Il tiristore a terminali o SCR ha sempre 4 strati
semiconduttori con drogaggio differente. Sono presenti 3 elettrodi anodo e catodo, ed il gate
connesso alla zona p intermedia. Il suo funzionamento è analogo al precedente, sempre con 3 zone:
1. Interdizione inversa;
2. Interdizione diretta ora il valore di soglia è variabile e dipende dalla corrente che entra
nel gate. La tensione di innesco Vt cala all’aumentare della corrente del gate I g, rendendo
possibile un migliore controllo;
3. Conduzione:si disattiva solo con corrente sotto alla soglia I m .
Il TRIAC consente il passaggio di corrente da entrambi versi, si comporta come due SCR collegati
in verso opposto, ma con il gate in comune;
Il GTO SCG consente un controllo più agevole della transizione dello stato di conduzione allo stato
interdetto; infatti può essere interdetto anche quando la corrente è maggiore di I m tramite un
impulso negativo di corrente al gate. Quello in figura, rappresenta il circuito di protezione del GTO
(a) con lo spegnimento dello stesso (b). Non sopportando elevate dv/dt, richiede un circuito R – C
di spegnimento (snubber) .
Esiste anche la configurazione del tiristore controllati a metallo – ossido – semiconduttore MCT
Il transistore bipolare (BJT):
Quasi saturazione
attiva
saturazione
Il primo è il simbolo, il secondo rappresenta la caratteristica i – v; il terzo è la caratteristica ideale.
Tale transistore consente un agevole controllo della corrente di collettore I c tramite la base Ib ed
hanno una tensione di break down inverso Vbi bassa. Normalmente il collettore è accoppiato in serie
con un diodo. Come si evince dalla figura b, questo tiristore è controllabile sia in accensione che in
spegnimento con l’applicazione di una corrente alla base, e spesso lavorano in zona di saturazione o
di quasi saturazione, mai in attiva. Ok per alte frequenze, per basse potenze sono migliori i GTO
perché più controllabili.
Il transistore MOSFET:
attiva
interdizione
ohmica
Sono componenti controllati sia in accensione che in spegnimento con un segnale di tensione
applicato al gate , che è separato dal resto del materiale semiconduttore da uno strato isolante, ma
che è vicino ai terminali source e drain, e la corrente in
queste fasi è sempre bassa in modo da facilitare le
operazioni. Applicando tensione positiva al gate, si
crea un campo elettrico che attrae gli e - del p creando 1
canale che permette la conduzione tra drain e source;
portando a 0 la tensione tra source e gate si spegne il
MOSFET. Sono dispositivi intrinsecamente veloci.
Nella regione ohmica id è circa proporzionale a Vds,
nell’attiva id è circa indipendente da Vds,
nell’interdizione con Vgs è inferiore al valore di soglia.
Sono usati come interruttori nell’attiva.
Il transistore IGBT:
Sono l’unione di BJT e MOSFET tenendo le basse perdite per conduzione ma lasciando i lunghi
tempi di commutazione dei primi, e unendoci la velocità dei secondi. La struttura è analoga ai
MOSFET, con l’aggiunta di un p al posto del drain, ma si comporta come l’BJT. Ora però il
parametro di controllo è la tensione, e non più la corrente del gate.
Torniamo a parlare dei MCT:
Sono analoghi ai GTO, ma sono pilotati in tensione e quindi il circuito di pilotaggio risulta più
semplice, ha tempi di commutazioni più brevi; hanno cadute di tensione inferiori agli IGBT.
Convertitori CA – CC :
Una misura di questi convertitori è dato dal fattore di ondulazione r (ripple), definito come il
rapporto tra valore efficace della componente alternata e la componente continua presenti nelle
tensione di uscita:
r = Vca,eff / Vcc =
–
Raddrizzatore monofase a semionda:
Utilizzando la seconda relazione viene che r = 121% e cioè che questo dispositivo trasforma il
segnale in ingresso sinusoidale in uno continuo in modo abbastanza scadente.
Raddrizzatore monofase ad onda intera:
Durante la semionda positiva i diodi D1 e D3 (verdi)
sono in conduzione, mentre D2 e D4 (rossi) sono
interdetti; solitamente r = 48% e cioè l’output ha
pulsazione doppia rispetto quella in ingresso.
Raddrizzatore trifase a semionda:
Ovviamente si considera sempre la maggiore delle tre tensioni al diodo come quella in conduzione,
gli altri sono interdetti; così in output c’è sempre la maggiore delle tre tensioni con r = 18,3%.
Raddrizzatore trifase ad onda intera:
I tre diodi verdi si comportano come un raddrizzatore trifase a semionda, quindi la tensione Ud1 in
output è la maggiore delle tre in ingresso; i tre diodi rossi consentono di avere la Ud2 minore della
tensione di alimentazione così si ottiene Udi = Ud1 – Ud2 .
Raddrizzatore trifase controllato:
ha accensione ritardata
spegnimento naturale; α
l’angolo di disturbo.
e
è
Convertitori CC – CC :
Detto anche chopper, serve a variare la tensione continua fornita in ingresso, variando la frazione di
tempo in cui il carico è connesso all’alimentazione.
Convertitori CC – CA :
Sono tipicamente gli inverter
come questo con Q che sono dei
SCR con parallelo un diodo che
permette il passaggio della
corrente in ritardo nel caso di
carico ohmico – induttivo, e
generalmente si azionano a
coppie incrociate (1 e 4 , 2 e 3) e
sempre contemporaneamente
sono interdetti. Si mostra inoltre
la tensione in uscita laddove le
due coppie vengano attivate in
un periodo T0 con on – off
alternato ed esclusivo. Nella
seconda immagine invece si
mostra come (considerando un
caso con un valore della
tensione doppio in quando
l’ampiezza
massima
di
oscillazione è doppia) , l’input
dei SCR sia sfasato sempre con
logica alternata , esclusiva e
sinusoidale. Lo sfasamento lo
si nota nel periodo in cui il segnale di uscita è nullo.
converter ad impulsi:
Convertitori CA – CA :
Questo dispositivo è costituito da un raddrizzatore controllato o non, posto in serie con un inverter.
variare l’ampiezza del segnale in uscita, agendo sui tempi d’innesco dei tiristori nel circuito
raddrizzatore o sulla sequenza d’innesco dell’inverter;
variare la frequenza del segnale in uscita, agendo sul periodo di accensione e spegnimento
dei tiristori presenti nell’inverter;
C.A.
C.A.
filtro
C.C.
C.A.
ESERCITAZIONE 2 EOLICO SU TERRAFERMA E OFF-SHORE:
la crescita della domanda di energia è dovuta sia alla crescita delle condizioni di benessere della
popolazione sia per un aumento demografico; questa combinazione di fattori ha portato le persone
fino ai 6 miliardi. Nel mondo la maggior produttrice è la Germania, seguita da Spagna e Stati Uniti,
con l’Italia 7°, nonostante anche nel nostro paese il trend abbia sottolineato una buona crescita
arrivando fino ai 2123 MW quando l’Europa intera ne produce 48545 MW. Come prevedibile nel
nostro paese la maggior parte degli impianti si hanno tra sud e isole (ben 87%) perché sono le aree
che meglio si prestano a rispondere alle condizioni di funzionamento imposte dalle tecnologie per
dare vantaggio economico energetico. Per quanto riguarda la terraferma in Italia la suddivisione dei
costi è tipicamente : il costo unitario totale con macchine a meno di 1 MW è tra 900 e 1000 €, con
macchine a più di 1 MW è tra 1100 e 1300 €, in entrambi i casi dati al 70% dal costo delle turbine e
dall’11 % dal costo di installazioni elettriche ed allacciamenti alla rete. Per farli andare, gli impianti
necessitano, come già detto, di condizioni di funzionamento che sono il vento e la producibilità
questo rende solo la Puglia e la Sardegna le 2 regioni. Inoltre non si può considerare tutta l’area
potenziale come sfruttabile poiché spesso si presentano problemi legati ad incompatibilità tra
impianti e pendenza delle aree o la loro fitta forestazione, senza considerare la necessità di stare
lontani dai centri abitati (sono brutti da vedere e molto rumorosi); per cui l’effettiva utilizzazione
delle aree residue richiede il confronto con problematiche tecniche, distanza dalla rete, idoneità
della rete stradale, destinazione d’uso del territorio, accettazioni amministrative e prospettive di
remunerazione. Il potenziale sfruttabile considerando siti e condizioni politico – economiche simili
alle attuali è inferiore ai 6000 MW, se invece ci fosse un cambio di strategia muovendosi più in
direzione dell’utilizzo di siti più pregiati (aumenterebbero i costi esterni), il potenziale crescerebbe
fino ai 12000MW. Ovviamente i costi sono andati calando nel corso del tempo. Alcuni vantaggi
dell’offshore: venti più intensi per cui maggiore producibilità e si passerebbe ai 3/4000 MWh/ MW;
minore turbolenza e variazione dei venti con l’altezza e quindi torri più basse e con vita più lunga;
possibilità di installare aerogeneratori più grandi ; riduzione dell’impatto visivo piantando
l’impianto almeno a 5 km dalla costa; si hanno più costi di investimento e manutenzione che
allineano i costi al kWh degli impianti di terra e offshore. Inoltre non disturberebbero con il rumore
(per cui potrebbero esserci macchine più grandi e performanti che tanto non disturbano ) e ci
sarebbe una maggiore area disponibile. In Europa chi ne ha di più è la Danimarca. Problemi :
aerogeneratori sono basate sul fondo marino tipicamente a 10-25 m per cui le coste dovranno avere
le giuste condizioni di vento, fondali bassi, avere sufficiente distanza e non avere vincoli ambientali
(paesaggio, riserve...); problemi di trasporto sia per montare che per mantenere; il collegamento con
la rete deve essere sottomarino; bisogna fare tutte le valutazioni del caso per l’impatto
sull’ecosistema autoctono; ma a fronte di tutto ciò, esiste una turbina abbastanza grande da
compensare tutte queste problematiche?
Il supporto per una profondità inferiore ai 30 m ha tre modelli: monopiede piantato, per gravità, a
tre-piedi. Invece per acque più profonde si posso avere le configurazioni in profondità con dei fili
stabilizzanti, a media profondità con fili più rigidi, galleggiante sulla superficie con una maglia di
fili come la prima ovvero a media rigidità. I costi sono proporzionali alla profondità cui è legata
anche la scelta del modello di impianto che si utilizzerà (sulle basse profondità si possono usare i
monopiedi che hanno anche dei costi minori rispetto agli impianti adatti per le grandi profondità).
Come differenza tra on e off, c’è sicuramente la ripartizione dei costi: on = 70% turbina, poi a
calare costi per le fondamenta, per l’ingegnerizzazione … ; off = 50% turbina e 25 % tra
collegamenti e fondamenta, poi a calare tutto il resto.
Posso pensare di utilizzare i superconduttori anche per l’eolico perché: li uso anziché usare il rame,
in CC hanno resistenza nulla e quindi si elimina l’effetto joule, tanto più è la taglia di potenza
(quindi la potenza dissipata) quanto più grande sarà la sezione dell’impianto ma con il
superconduttore posso ridurre la sezione di 1000 volte rispetto al materiale normale, quindi potrei
aumentare la taglia senza dover aumentare la sezione riducendo così il prezzo e la struttura della
pala in generale. I cavi a terra sono sempre stati per la CA : vengono riuniti i 4 cavi e collegati al
sistema senza intermediari; ora si possono usare i cavi in CC per le grandi distanze (specialmente se
sottomarine) e potenze che però vede l’introduzione di due converter, un generatore e un
trasformatore per ricollegarsi al sistema. È migliore la CC alle grandi distanze perché bisogna
ridurre gli effetti capacitivi del trifase che avendo in parallelo le tre configurazioni della fase
singola, si trovano ad avere elevati effetti capacitivi. Questi si possono risolvere con l’introduzione
dei cavi CC in quanto poiché volendo annullare la corrente passante per i capacitori ho che i =
C*dV /dt , e l’unico modo appunto è annullare la variazione di tensione che si fa con l’introduzione
del sistema continuo che perde l’andamento sinusoidale. In CC il capacitore si sostituisce con un
circuito aperto. Inoltre con l’introduzione del CC si ottengono vantaggi anche a livello induttivo in
quanto è nota la relazione che vede V = L * d i/d t = 0 e questo rappresenta un corto circuito e
quindi annulla le resistenze, però bisogna cambiare l’allacciamento dal momento che la rete è in
CA.
ESERCITAZIONE 4 ENERGIA FOTOVOLTAICA :
Energia dal sole 16000000 °C, emissione pressoché costante di radiazioni elettromagnetiche la
cui potenza è 400000 miliardi di miliardi di kW e dispone di riserve di idrogeno molto grandi; ma
ciò che arriva effettivamente sulla Terra si aggira circa come ordine di grandezza sui 1000 kW/m2
con cielo sereno e circa 100-150 con cielo coperto (ovviamente sono valori medi che cambiano a
seconda della zona, della stagione e dell’ora della rilevazione). L’energia utile deriva
dall’irraggiamento che si può facilmente catturare con le tecnologie le cui prestazioni sappiamo
dipendere dalla latitudine (+ o – vicino all’equatore) e dalle condizioni climatiche locali.
L’irraggiamento è infatti la quantità di energia solare incidente su una superficie unitaria in un
determinato intervallo di tempo, tipicamente il giorno kW/m2 gg. Il valore istantaneo della
radiazione solare incidente sull’unità di superficie è detto radianza [kW/m 2]. Anche in Italia , come
nel resto dell’Europa, si ha molta differenza tra i valori dell’irraggiamento e della radianza; infatti si
passa dai 3,3 kW/m2 della pianura padana ai 4,7 kW/m2 della Sicilia. Nella produzione fotovoltaica
nel mondo i leader sono i giapponesi e poi gli americani.
Come materiale per le celle si usa tendenzialmente silicio opportunamente trattato. Il problema dei
pannelli è che hanno rendimenti molto bassi (18-20%) e ci deve essere convenienza dal ciclo di vita
energetico delle celle fv; in 20 anni si riesce a riprodurre il costo energetico del pannello per 5 o 6
volte al massimo lasciando il payback oltre il 4° anno. Struttura cristallina: il silicio ha la struttura
cristallina del diamante 1° tipo) ho monocristallo con atomi disposti con periodicità
tridimensionale. Il Si appartiene al 4° gruppo della tabella periodica degli elementi per cui ha 4
elettroni nell’orbita esterna, che tramite la condivisione di 4 atomi adiacenti fa il legame covalente.
Ha bassa conducibilità, ma basta togliergli un elettrone di valenza e fare il salto quantico lasciando
una “lacuna” che verrà colmata da un altro elettrone sprigionando energia elettrica. Il drogaggio dei
semiconduttori: si possono usare due elementi della tabella come il fosforo (quinto gruppo terza
livello) o come il boro (terzo gruppo secondo livello).
Drogaggio di tipo “n”: l’atomo di fosforo ha 5 e - esterni di cui 4 si legano al silicio adiacenti
lasciandone uno libero quindi diventando un portatore di carica negativa e cercando la disponibilità
di altri atomi a fare legami covalenti. Questi atomi di fosforo si chiamano DONATORI, e dopo il
legame questa tipologia di semiconduttori sono neutri;
Drogaggio di tipo “p”: l’atomo di boro ha 3 e- esterni che si legano al silicio lasciando però un suo
e- libero, quindi creando una “LACUNA” (che rappresenteremo con “h”) che deve essere riempita e
sono dei portatori di carica positivi. Questi atomi di boro si chiamano accettori e si vanno a legare
con un altro atomi che ha disponibilità di un e-. Anche loro nel complesso sono dei semiconduttori
neutri.
Giunzione di tipo “p-n”: le due strutture vengono poste a
contatto. Avremo la parte P con eccesso di lacune per cui un
ambiente che attira e- e la parte N con eccesso di e - che è alla
ricerca di zone opposte x cederglieli. Ciò coincide anche con la
generazione del campo elettrico E.
L’effetto fotovoltaico: illuminando la giunzione, si generano delle coppie e - h nelle zone N e P con
il campo E che separa e - dagli h in eccesso spingendoli in direzione opposte (alterazioni di
equilibrio ). Tramite il collegamento esterno, si genera il flusso ordinato di cariche ( corrente
elettrica ) che ristabilisce l’equilibrio. Non tutta la radiazione luminosa che colpisce la cella fv
riesce a generare la coppia e-h. I fotoni incidenti devono avere una certa energia in più dell’energia
soglia detta energia di banda “Ε” = h*ν/ λ (equazione di Planck) che diventa “Ε” = 1,23/λ eV; per il
silicio è 1,1 eV (cioè solo i fotoni provenienti dal sole con uno spettro della luce maggiore di 1,1 eV
vengono sfruttati e cioè con λ < 1,1 ƞm ) , ma che in generale dipende dal tipo di materiale, e
laddove si indica con h = costante di Planck; ν = frequenza luce incidente; λ = lunghezza d’onda.
Per cui si avrà che l’energia in eccesso rispetto “Ε” viene usata per eccitare gli e- andando a creare i
portatori + ovviamente la creazione di calore , mentre l’energia se restasse inferiore al valore di “Ε”,
verrebbe buttata nello scambio termico sottoforma di calore. Quindi definito che non tutti gli
elettroni che colpiscono il pannello, riescono a generare energia, bisogna aggiungere che non tutta
questa parte si riesce a convertire in energia elettrica ecco che dal Sole partono 100MW ma dal
pannello si estrae energia solo da circa 23 milliwatt. Bisogna andare a migliorare l’efficienza che
qui si traduce in un utilizzo di una più ampia porzione dello spettro di radiazione solare, ma questo
non è altro che un trade-off ( perché so che P = V*I ) tra banda Εgrande e Εpiccola: con la grande che dà
un campo e una d.d.p. maggiore, mentre quella piccola dà più portatori e quindi correnti più elevate.
Fabbricazione delle barre di silicio: estrazione, riduzione, purificazione e cristallizzazione;
Fabbricazione della cella fv cristallina: squadratura ( che tramite il taglio con lama diamantata
genera la barra di silicio), taglio (si tagliano andando a generare dei “wafers”), drogaggio.
TIPOLOGIE E RENDIMENTI DELLE CELLE :
Nel processo produttivo il silicio poli viene versato
in blocchi che hanno una forma quadra. I blocchi
raffreddati vengono tagliati in lingotti e quindi
sezionati in Wafer da 200 / 250. .Il silicio poli
cristallino ha una grana più grossa del silicio mono
con rendimenti tra il 12 e il 14 %. Sono più facili da
riutilizzare.
Con un processo produttivo più complesso, dal
silicio fuso, vengono ottenuti dei lingotti cilindrici
di silicio mono cristallino. Al cilindro viene data
una forma esagonale e quindi sezionato in wafer
sottili. Questo ha rendimenti tra il 13 e il 17 %.
Sono più performanti ma anche più costosi in
termini di costi sia energetici che monetari.
Il silicio amorfo è caratterizzato dal modo
disordinato in cui gli atomi o le molecole sono
legati tra di loro. Utilizzando il Silicio Amorfo
non si può parlare di celle, in quanto si tratta di
strati sottili di silicio amorfo applicati su superfici
più grandi delle normali celle e ovviamente
presentano anche rendimenti più bassi che stanno
6-10%.
Moduli fotovoltaici
caratteristiche: generalmente sono connessioni in serie o in parallelo di celle fotovoltaiche, e se
uniti danno un pannello che a sua volta se unito con più pannelli, genera una stringa che a sua volta
se unita con più stringhe, genera una campo fotovoltaico; sono sandwitch costituiti da vetro
temperato e un foglio di plastica; hanno
uno spessore di circa 2 o 3 cm ed un peso
che può variare dai 6 ai 21 kg.
caratteristica I-V:
Voc = tensione a vuoto, cioè quando il
sistema mette corrente infinita;
Icc = Isc ;
questi 2 parametri sono funzione del
materiale e con silicio sono bassi; noto dal
grafico che con R che tende a 0 e con R che
tende ad infinito lavoro sempre senza
potenza per cui deve esistere 1 valore del
carico che dia un valore massimo del
rendimento. Tale valore del rendimento è
espresso dalla formula di FF.
PRIMO CASO:
dal primo grafico noto come
se aumento l’irraggiamento
si abbia 1 notevole aumento
di Isc in quanto questa
risulta essere direttamente
proporzionale all’ irraggia ,
che genera 1 aumento della
Pm; dal secondo grafico
noto come aumenti sì la Pm,
ma a fronte di 1 aumento
minimo di Voc poiché
questa risulta essere già
elevata
a
piccoli
irraggiamenti per cui l’incremento sicuramente incide molto meno;
SECONDO CASO:
dal primo grafico noto che
mentre Isc resta quasi
invariata al variare della
temperatura, Voc ha una
relazione lineare. Quindi
Voc cala sensibilmente con
il calo in parallelo della
temperatura dai 70° C ai
10°C.
Conoscendo
la
formula con cui trovo il
valore massimo FF, vedo
che è meglio avere un Pm
più basso, in quanto quello
mi rappresenta il picco.
Devo sempre ricordare che l’obiettivo è quello di massimizzare la potenza e lo posso fare con la
massimizzazione del prodotto tra i due valori di I e V.
TIPOLOGIE E INSTALLAZIONE DEI SISTEMI FOTOVOLTAICI.
C’è molta instabilità nello sfruttamento degli impianti dati dalla incertezza delle forniture tipiche
delle fonti rinnovabili. Si hanno 2 configurazioni che esprimono tale problematica:
1. stand alone:
Gli impianti autonomi vengono utilizzati
prevalentemente nelle zone isolate, nelle
quali non è possibile allacciarsi alla rete
elettrica. Con questi tipi di impianti
l'immagazzinamento dell'energia viene
garantito da batterie, con la possibilità di
avere corrente in tensione continua di 12,
24, 48 V e, grazie agli inverter, in
corrente alternata a 110, 220, 400 V. In
questi sistemi l’idea è produrre in AC e
usare direttamente tale prodotto; ciò che
avanza si accumula in batterie x le
esigenze notturne o nei momenti di
condizioni ambientali sfavorevoli.
2. installazioni connesse alla rete:
Gli impianti grid connected (Fig. 2)
sono allacciati alla rete elettrica e
funzionano come produttori e/o
utilizzatori di energia elettrica:
quando l'impianto domestico (o
industriale) è in sovrapproduzione
di energia (cioè quando riesce a
coprire il suo fabbisogno) l'eccesso
viene ceduto alla società elettrica,
per cui viene immesso in rete e
conteggiato con un contatore "a
dare" da parte della società elettrica;
nel caso in cui l'impianto non riesca
a coprire il fabbisogno di energia elettrica, come ad esempio nelle ore notturne, l'energia per
gli utilizzatori viene prelevata dalla rete elettrica con contatore "ad avere". Ecco perché si
chiamano anche “smart grid” in quanto necessitano di avere un allacciamento intelligente
che consente il flusso biunivoco dell’energia.
Il Decreto Legge del 28 luglio 2005 (criteri per l'incentivazione della produzione di energia
elettrica mediante "convenzione fotovoltaica") stabilisce che per piccoli impianti di potenza
inferiore a 20 kWpicco l'energia elettrica che viene inviata in rete è pagata per 20 anni a 0.445
Euro/kWh (mentre quella prelevata dalla rete è pagata circa 0.15 Euro/kWh).
CCS:
Tre fasi importanti:
1. cattura : durante la produzione della CO2 , ma non si potrà catturare tutto ciò che si produce
e la si può effettuare
a. prima = tramite gassificazione del carbone o la liquefazione,; presenta molti costi ,
ma permette l’utilizzo delle tecnologie del petrolio e del metano che essendo più
avanzate , consentono una migliore efficienza;
b. durante = non uso solo aria come comburente, ma utilizzo l’ossigeno in modo da
avere una separazione più facile della CO 2 proveniente dai fumi;
c. dopo = si usano membrane per trattenere i fumi.
Bisogna utilizzare tutti i metodi insieme nonostante abbassino i rendimenti ed innalzino i
costi. Il confronto va fatto con il costo per l’acquisto dei diversi certificati per l’immissione
in atmosfera della CO2
2. trasporto : tramite pipeline o via mare questo si potrebbe realizzare mantenendo i costi
molto bassi , ma prima bisogna trattare le CO 2 con liquefazione;
3. confinamento : molti metodi ma solo i primi 2 sono i più rilevanti:
a. geologico = nelle cave o nei bacini acquiferi salini profondi, ma bisogna prestare
attenzione all’impermeabilità della roccia , alla profondità, e alla tenuta che deve
essere garantita oltre ai 1000 anni;
b. produttivi = nei pozzi di petrolio, dove si incrementa la disponibilità dei giacimenti
poiché ne alza il livello;
c. profondità oceanica;
d. mineralizzazione;
e. biofissazione.
Tutto questo processo presenta alcune problematiche come la non conoscenza né delle dimensioni
delle cave (tra l’altro le stesse che dovrebbero venire usate per stoccare altre risorse come idrogeno
o aria compressa), né il comportamento della CO 2 stoccata, senza considerare le problematiche
normative e dell’accettazione sociale.
SUPERCONDUTTORI :
Materiali con R = 0 solo se che ha temperatura, densità, campo magnetico sotto una certa soglia.
Sfrutta temperature criogeniche dell’ordine di grandezza tra 7 – 70 K. Questi materiali hanno 4
caratteristiche fondamentali :
R = 0 in CC si ha un’efficienza elevata per il bassissimo effetto joule, per la levitazione
magnetica, e per l’accumulo magnetico;
alta densità di corrente a parità di sezione si ha più potenza;
diamagnetismo;
nel caso si superino i valori di soglia i superconduttori si comportano come dei conduttori
normali;
Per limitare le perdite, si utilizza del rame come rivestimento sul filo sottile. Infatti il rame si
raffredda molto velocemente il calore disperso. Per la refrigerazione si possono utilizzare 2
modalità che sono : bagno (con elio o azoto), contatto fisico (si mette del rame con il crycooler che
però necessita di grande potenza).
7 APPLICAZIONI:
A. SMES : per l’accumulo energetico. Si usano per esempio sul motore con il kers, ma c’è bisogno
che la corrente non vari nel tempo. Immagazzina energia elettrica e restituisce sempre energia
elettrica senza bisogno di trasformazioni che ne diminuirebbero l’efficienza. Lavorano per meno
di 10 secondi, ma sono estremamente rapidi nelle risposte; possono usarsi anche come ibridi con
funzionamento a motore a combustione a regime, mentre in accelerazione o in frenata si utilizza
l’elettrico poco futuro perché non si possono impiantare crycooler sui veicoli;
B. Levitazione magnetica : la rotaia è di superconduttori, mentre il treno è magnetico;
C. Magneti permanenti superconduttivi : applicazione tipica nella rete eccitatrice delle sincrone;
D. Volano : si utilizzano i superconduttori per ridurre l’attrito per ridurre l’auto–scarica ;
E. Motori / generatori superconduttori : aumenterebbero i rendimenti fino al 98%, la potenza , la
coppia a parità del numero di giri;
F. Cavi superconduttori : trasporto per ridurre le perdite e l’ingombro;
G. Limitatori superconduttivi della corrente di guasto : sezionando la rete con questi componenti
con un’efficienza migliore, ogni volta si oltrepassa il valore di soglia della corrente, anziché
portarsi al black-out, il superconduttore si comporta come un circuito aperto.