")
Esperienza massa–molla
M. Fanti
Dipartimento di Fisica, Università di Milano
M.Fanti (Physics Dep., UniMi)
1 / 21
Il sistema massa–molla
Il sistema è costituito da una molla appesa ad un vincolo, cui è agganciata
una massa m.
La molla ha la proprietà di esercitare una forza di richiamo elastica, cioè
opposta al verso dell’allungamento ∆` della molla
di intensità proporzionale all’allungamento ∆`
Fel = −k · ∆`
(legge di Hooke)
Le altre forze in gioco sono:
la forza di gravità: Fg = mg (con g = 9.806 m · s−2)
la forza di attrito: questa entra in gioco solo quando il sistema è in moto,
e si oppone al moto stesso
Il sistema è dotato di un disco che crea un attrito viscoso con l’aria circostante; assumendo che questa sia la principale componente di attrito avremo
Fattr = −C · v , essendo v la velocità del moto.
M.Fanti (Physics Dep., UniMi)
2 / 21
La forza elastica e il moto armonico
Soffermiamoci sulla forza elastica: Fel = −k · ∆x, dove ∆x = x − x0 è uno spostamento da un punto di equilibrio x0
e k è una costante tipica del sistema.
2
La forza elastica dà luogo ad un moto oscillatorio armonico. Infatti, applicando F = ma = m ddt 2x troviamo:
d 2x
k
(x − x0)
=
−
dt 2
m
che ha per soluzione:
r
x(t) = x0 + A · cos(ω0t + φ)
ω0 =
k
m
!
dove ω0 dipende dalle caratteristiche del sistema (k e m) e A, φ dalle condizioni iniziali: x(t = 0) = A cos(φ) e
v (t = 0) = −ω0A sin(φ)
Il moto è dunque periodico, con periodo T , cioè per qualunque istante t x(t) = x(t ± T ) = x(t ± nT ), con n intero.
Il periodo è calcolabile come:
T =
2π
ω0
e la frequenza è:
ν0 =
M.Fanti (Physics Dep., UniMi)
1
ω0
=
T
2π
3 / 21
Importanza della forza elastica
La forza elastica è associata ad una energia potenziale U(x) = k2 (x − x0)2, con x0 punto di equilibrio del sistema.
Ogni moto di un sistema intorno al suo punto di equilibrio, per piccoli spostamenti può essere approssimato dalla forza
elastica.
Esempio: oscillazione di atomi all’interno di una molecola, o di un cristallo.
Un esempio più complesso: le onde sonore. Qui le molecole di un mezzo vibrano intorno alla loro posizione di
equilibrio, ed inoltre “trasmettono” il loro stato di vibrazione alle molecole vicine. L’argomento verrà trattato in
seguito, ma qui ricordiamo che si tratta sempre di fenomeni legati alla forza elastica.
Un ulteriore esempio: le onde elettromagnetiche. Qui non si tratta più di un fenomeno meccanico: le quantità ch
oscillano sono il campo elettrico e il campo magnetico. Non sono oscillazioni nello spazio, ma sono sempre regolate da
equazioni formalmente analoghe.
M.Fanti (Physics Dep., UniMi)
4 / 21
Dinamica del sistema massa–molla
Chiamiamo `0 la lunghezza della molla a riposo (cioè non sottoposta ad alcuna forza esterna), ` la sua lunghezza
attuale, cosicché ∆` = ` − `0.
Scegliamo un asse x orientato verso il basso, cosicché magiori allungamenti ∆` corrispondono a maggiori valori di x.
La forza totale agente sulla massa m appesa è:
F = Fel + Fg + Fattr = −k(` − `0) + mg − Cv
Punto di equilibrio
Il punto di equilibrio è quello in cui il sistema fermo non subisce forze. Questa condizione, imponendo F = 0 con
v = 0, corrisponde ad una lunghezza `eq tale che:
k(`eq − `0) = mg
def
Pertanto, d’ora in poi esprimiamo lo stato del sistema con lo spostamento dal suo punto di equilibrio: x = ` − `eq
Dinamica
def
Ovviamente la velocità è v =
d`
dt
=
dx
dt .
L’equazione del moto diventa dunque:
d 2x
dx
m 2 = F = −kx − C
dt
dt
(ogni effetto gravitazionale è riassorbito nella definizione del punto di equilibrio)
M.Fanti (Physics Dep., UniMi)
5 / 21
Il modello del sistema massa–molla
L’equazione
d 2x
dx
m 2 = F = −kx − C
dt
dt
costituisce la nostra formulazione del modello del sistema, ovvero uno strumento matematico che collega quantità
osservabili (in questo caso la posizione x(t)) a grandezze intrinseche del sistema stesso (in questo caso la massa m, la
costante elastica k, la costante di attrito C ).
Il modello consente di:
conoscere le grandezze intrinseche del sistema partendo da una o più misure degli osservabili;
effettuare predizioni sugli osservabili, una volta che le grandezze intrinseche del sistema siao note con sufficiente
precisione
Inoltre: diverse misure indipendenti (anche effettuat in condizioni dinamiche diverse) degli osservabili possono essere
utili a validare il modello, oppure a rivelarne i limiti. In quest’ultimo caso, il modello stesso potrebbe venire
riformulato, aggiungendo dettagli primatrascurati, alla luce delle conclusioni tratte.
M.Fanti (Physics Dep., UniMi)
6 / 21
Misure statiche
M.Fanti (Physics Dep., UniMi)
7 / 21
Misure degli allungamenti
L’equazione k(`eq − `0) = mg , valida in condizioni statiche, può essere usata
per misurare la costante elastica k.
Il set-up dell’esperimento prevede un sonar collegato ad un computer, che
misura la distanza Y del disco del sistema massa–molla, ad intervalli di tempo
regolari (a) .
In condizioni statiche ci si aspetta che Y (t) sia costante.
In pratica, la sensibilità dello strumento è tale da consentire di osservare piccole oscillazioni
residue. . . Ovviamente la misura andrà “ripulita” da tali oscillazioni.
La strumentazione non consente una misura diretta di `eq e `0. Però
Y + `eq = costante. Con due masse note m(1), m(2), i punti di equilibrio
(1) (2)
`eq , `eq devono soddisfare:
h
i
h
i
h
i
(2)
(1)
(2)
(1)
(1)
(2)
g m −m
= k `eq − `eq = k Y − Y
⇒ si può estrarre k:
m(2) − m(1)
k = g (1)
Y − Y (2)
a
Il numero di misure al secondo è impostabile: si suggerisce di non eccedere 50 misure/secondo
M.Fanti (Physics Dep., UniMi)
8 / 21
Verifica della linearità
Quanto detto finora non basta: vogliamo verificare che il modello ipotizzato sia valido, ovvero che descriva
correttamente le osservazioni.
Il valore di k è indipendente dalla scelta delle masse m(1), m(2)?
Un possibile approccio: provare tante masse m(0), . . . , m(n) e misurare i corrispondenti Y (0), . . . , Y (n), quindi calcolare il k fra due masse vicine:
k
(i)
m(i) − m(i−1)
= −g (i)
Y − Y (i−1)
( i = 1, . . . , n )
e verificare la compatibilità fra i k (1), . . . , k (n) ottenuti (attenzione alla
propagazione degli errori!)
Un altro approccio: prendere la massa più piccola m(0) come “zero”; se la
legge è veramente lineare allora ci aspettiamo che:
h
i gh
i
(0)
(i)
(i)
(0)
Y −Y
=
m −m
k
⇒ raccogliere n coppie m(i) − m(0) ; Y (0) − Y (i) , e verificare se sono
compatibili con una retta passante per l’origine
i
0
1
2
..
.
n−1
n
m(i)
··· ± ...
··· ± ...
··· ± ...
..
.
··· ± ...
··· ± ...
Y (i)
··· ± ...
··· ± ...
··· ± ...
..
.
··· ± ...
··· ± ...
k (i)
—
··· ± ...
··· ± ...
..
.
··· ± ...
··· ± ...
i
m(i) − m(0) Y (0) − Y (i)
1
··· ± ...
··· ± ...
2
··· ± ...
··· ± ...
..
..
..
.
.
.
n − 1 ··· ± ...
··· ± ...
n
··· ± ...
··· ± ...
Quante masse? Il più possibile, compatibilmente con il tempo a disposizione, e le caratteristiche della molla
M.Fanti (Physics Dep., UniMi)
9 / 21
Conclusioni
Mediante una serie di misure statiche di allungamenti, ottenuti appendendo alla molla masse note, è possibile
verificare se sussiste la legge lineare di Hooke Fel = −k∆`
In caso affermativo, si estrae la costante elastica k
Questo è lo scopo della prima parte dell’esperienza
M.Fanti (Physics Dep., UniMi)
10 / 21
Misure dinamiche
M.Fanti (Physics Dep., UniMi)
11 / 21
Interludio: l’esponenziale complesso eiφ
Definizione
eiφ
def
=
cos(φ) + i sin(φ)
Proprietà
Conserva tutte le proprietà dell’esponenziale reale; in particolare
(1)
eiφ1+iφ2 = eiφ1 + eiφ2
def
Si può estendere all’esponente complesso: se z = x + iy allora ez = ex eiy = ex [cos(y ) + i sin(y )]
Per z1, z2 complessi, ez1+z2 = ez1 ez2
In particolare, per |dz| → 0, edz = edx [cos(dy ) + i sin(dy )] ' (1 + dx)(1 + idy ) ' 1 + dx + idy ' 1 + dz, cosicché
ez+dz = ez edz ' ez (1 + dz), quindi:
d z
e = ez
dz
L’esponenziale complesso è lo strumento base per risolvere le equazioni differenziali lineari
usare le regole di somma delle funzioni trigonometriche cos(φ1 + φ2 ) = cos φ1 cos φ2 − sin φ1 sin φ2 e
sin(φ1 + φ2 ) = sin φ1 cos φ2 + sin φ1 cos φ2
1
M.Fanti (Physics Dep., UniMi)
12 / 21
Legge oraria del sistema massa–molla (1)
Partiamo dall’equazione del moto:
d 2x
dx
m 2 = F = −kx − C
dt
dt
def
def
Definiamo per comodità 2γ = C /m e ω02 = k/m, quindi:
d 2x
dx
+
2γ
+ ω02x = 0
2
dt
dt
È un’equazione differenziale lineare di secondo ordine a coefficienti costanti.
La teoria delle equazioni differenziali ci dice che esistono due soluzioni linearmente indipendenti e che la soluzione
generale è una combinazione lineare di queste.
Per trovare le due soluzioni, pensiamo ad x come una variabile complessa, x(t) → z(t). Poiché i coefficienti sono
2
2
reali, se z(t) è soluzione di ddt 2z + 2γ dz
dt + ω0 z = 0, allora x(t) = R[z(t)] è soluzione dell’equazione in x.
Dalla teoria, la forma della soluzione è z(t) = Aest , dove s si può determinare per sostituzione, osservando che
d st
st
dz e = s · e :
q
2
2
s + 2γs + ω0 = 0
⇒
s± = −γ ± γ 2 − ω02
quindi
s+ t
z(t) = A+e
M.Fanti (Physics Dep., UniMi)
s− t
+ A−e
−γt
=e
h
i
√
√
+ γ 2 −ω02 t
− γ 2 −ω02 t
A+e
+ A−e
13 / 21
Legge oraria del sistema massa–molla (2)
p
ω02 − γ 2. In tal caso il moto è descritto dalla legge
q
def
ω00 = ω02 − γ 2
x(t) = Ae−γt cos(ω00 t + φ)
Il caso che ci interessa è γ < ω0, cosicché s± = −γ ± i
È un moto oscillatorio smorzato, A, φ dipendono
iniziali, ω00 dalle caratteristiche del sistema.
q dalle condizioni
C 2
k
0
0
Notare che ω0 è influenzato dall’attrito: ω0 = m − 2m
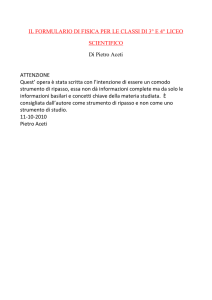
exp(-[0]*x)*(cos([1]*x)+[0]/[1]*sin([1]*x))
moti oscillatori smorzati:
— ω0 = 1 , γ = 0.01
— ω0 = 1 , γ = 0.1
1
0.5
moto smorzato:
— ω0 = 1 , γ = 10
moto critico:
— ω0 = 1 , γ = 1
0
-0.5
-1
0
5
10
15
20
25
30
35
40
45
50
Il caso γ > ω0 corrisponde ad un moto smorzato; il caso-limite γ = ω0 dà il moto critico
M.Fanti (Physics Dep., UniMi)
14 / 21
Verifica della legge oraria
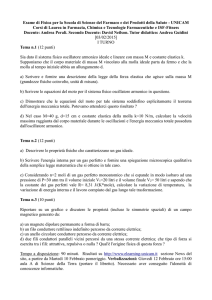
Y(t) [mm]
Il sonar collegato al computer consente di misurare la distanza Y (t) in
una sequenza di istanti t equidistanziati di ∆t (a) . Ricordando che
x(t) + Y (t) = costante, possiamo visualizzare la legge oraria del moto:
190
180
(t0;A0)
(t1;A1)
170
(t2;A2)
160
(t3;A3)
(t4;A4)
(t5;A5)
150
(t6;A6)
140
130
120
0
1
2
3
4
5
6
t [s]
misurando la distanza fra n creste si ottiene il periodo: T = (tn − t0)/n
misurando le altezze delle creste A0, A1, . . . , An , . . . si misura lo
smorzamento: ci si aspetta infatti che An = A0e−γtn
l’intervallo ∆t è impostabile attraverso la frequenza di campionamento νsampling = 1/∆t: non eccedere
νsampling = 50 Hz, corruspondente a ∆t = 0.02 s, altrimenti il sonar non funziona correttamente.
a
M.Fanti (Physics Dep., UniMi)
15 / 21
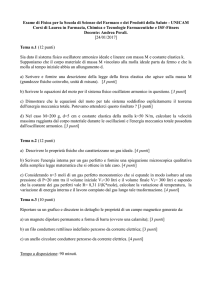
Effetti del campionamento
Y(t) [mm]
Poiché l’acquisizione dati non è continua, ma avviene ogni ∆t, la posizione delle creste non è perfettamente accurata:
190
180
(t0;A0)
(t1;A1)
170
(t2;A2)
160
(t3;A3)
(t4;A4)
(t5;A5)
150
(t6;A6)
140
130
120
0
1
2
3
4
5
6
t [s]
individuato l’istante ti in cui rileviamo un massimo locale, il massimo “vero” sarà localizzato a ti ± ∆t
il valore dello spostamento massimo Ai è sempre sottostimato.
M.Fanti (Physics Dep., UniMi)
16 / 21
Misura dinamica della costante elastica k
Da quanto visto (e assumendo ω0 γ — da verificare successivamente!) ci aspettiamo
r
4π 2
k
0
2
ω0 ' ω0 =
⇒
T =
·m
m
k
Questa legge deve valere pe qualunque valore della massa appesa.
Primo approccio: per ogni massa m(i) misuriamo il periodo T (i) e calcoliamo
k
(i)
m(i)
= 4π
[T (i)]2
2
I valori ottenuti di k (i) sono fra loro compatibili?
Si osserva un andamento dei k (i) in funzione delle masse m(i) ?
i
m(i)
1 ··· ± ...
2 ··· ± ...
..
..
.
.
n ··· ± ...
T (i)
··· ± ...
··· ± ...
..
.
··· ± ...
[T (i) ]2
··· ± ...
··· ± ...
..
.
··· ± ...
k (i)
··· ± ...
··· ± ...
··· ± ...
Confrontate con la misura statica di k fatta in precedenza:
per quali masse le misure dinamiche di k (i) si avvicinano di
più a quella statica?
Come possiamo spiegare l’effetto? La massa della molla può giocare un ruolo?
[suggerimento: anche la molla “scarica” può oscillare sotto il suo stesso peso. . . ]
Secondo approccio: verifichiamo se i punti (m; T 2) prelevati rispettano una legge lineare: facciamo un fit lineare e
guardiamo il χ2.
Se la legge lineare è soddisfatta, T 2 = a · m + b e possiamo estrarre k = 4π 2/a. Qual è il significato di b?
M.Fanti (Physics Dep., UniMi)
17 / 21
Y(t) [mm]
Misura dello smorzamento
190
180
(t0;A0)
(t1;A1)
170
(t2;A2)
160
(t3;A3)
(t4;A4)
(t5;A5)
150
(t6;A6)
140
130
120
0
1
2
3
4
5
6
t [s]
Misurare le ampiezze massime Ai raggiunte dalle creste, e i tempi ti a cui avvengono.
Poiché ai massimi cos(ω0t + φ) = 1, la legge oraria ci dà Ai = A0e−γ(ti −t0)
(i)
(0)
(0)
(i)
Provare a mettere i punti t − t ; ln[A /A ]
un grafico: stanno su una retta?
Inoltre, provare a calcolare
(0) A
1
γ (i) = (i)
ln
t − t (0)
A(i)
(i)
su
I γ ottenuti sono compatibili, o mostrano un andamento in funzione del tempo trascorso?
Che cosa ne deduciamo?
M.Fanti (Physics Dep., UniMi)
i
0
1
2
..
.
n−1
n
t (i)
··· ± ...
··· ± ...
··· ± ...
..
.
··· ± ...
··· ± ...
A(i)
··· ± ...
··· ± ...
··· ± ...
..
.
··· ± ...
··· ± ...
t (i) − t (0) ln[A(0) /A(i) ]
—
—
··· ± ...
··· ± ...
··· ± ...
··· ± ...
..
.
··· ± ...
··· ± ...
··· ± ...
··· ± ...
γ (i)
—
··· ± ...
··· ± ...
··· ± ...
··· ± ...
18 / 21
Conclusioni
Appendendo alla molla diverse masse note, e misurando lo spostamento (oscillazione) della molla al passare del tempo,
è possibile verificare la legge oraria del moto
x(t) = Ae−γt cos(ω00 t + φ)
dove le quantità γ e ω00 sono legate a granzezze intrinseche del sistema:
s
C
C
k
γ=
;
ω00 =
−
2m
m
2m
Cambiando la massa appesa, si osserva che il valore calcolato k = (2π/T )2 · m cambia con m ed è incompatibile con
la misura statica di k. La causa di ciò è che nel modello abbiamo omesso l’inerzia della molla. Il modello va dunque
migliorato, considerando una massa efficace del sistema meff = m + δm, tale che k = (2π/T )2 · (m + δm).
δm si può dedurre da un fit lineare. È legato alla massa della molla, ma numericamente diverso da essa, poiché la
molla non si muove come un corpo rigido.
Trascurare δm nella prima formulazione del modello dava luogo a misure sbagliate di k: questo è un esempio di errore
sistematico, dovuto in questo caso ad una formulazione imprecisa del modello che dovrebbe descrivere il sistema in
esame. Una presa dati accurata e ridondante permette di identificare l’inaccuratezza della formulazione e di
correggerla.
M.Fanti (Physics Dep., UniMi)
19 / 21
Percorso dell’esperimento
a
(1 parte)
M.Fanti (Physics Dep., UniMi)
20 / 21
Traccia
Ci sono a disposizione diverse molle, con caratteristiche meccaniche diverse. Per ciascuna di queste si svolgono le
seguenti misure
Misure statiche
Misure degli allungamenti, con diverse masse appese.
Verifica della legge di Hooke e determinazione della costante elastica k
Misure dinamiche
Misura del periodo di oscillazione T e della costante di smorzamento γ per diverse masse appese.
Verifica della relazione lineare fra m e T 2, estrazione della costante elastica k e dell’effetto inerziale della molla δm.
Controllo della compatibilità con il valore di k ottenuto dalle misure statiche.
Andamento di γ in funzione di m: è come atteso?
Provare a cambiare il disco frenante: come varia γ rispetto alla superficie del disco?
Alcuni accorgimenti pratici. . .
L’esperimento probabilmente si svolgerà in due giornate. Pertanto, attenti a non confondere le molle con quelle deglialtri gruppi,
altrimenti confonderete anche i k e i δm.
I pesetti da applicare alla molla “sembrano” tutti uguali, ma non lo sono. Quando li pesate sulla bilancia, non confondete la
sequenza con cui li caricate sul porta-pesi.
Portatevi sempre a casa i dati prelevati: a casa potrete fare con comodo l’analisi (calcoli, fit lineari, etc), ma se perdete i dati dovrete
riprenderli in lab. Non fidatevi a lasciarli sul PC del lab . . . si potrebbe rompere!
Per le misure dinamiche, T e γ si possono estrarre dalla stessa serie temporale, per velocizzare il tutto.
M.Fanti (Physics Dep., UniMi)
21 / 21
")