LL. MM. in Informatica e Fisica
A.A. 2015-2016
Diagnostica per immagini
8 – Trattamento delle immagini mediche
Sistema per imaging medico
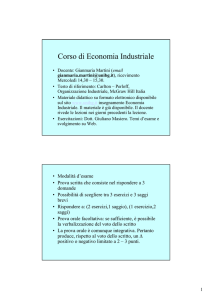
Un generico sistema per immagini computerizzate può
essere rappresentato dal seguente schema:
Diagramma a blocchi dei componenti di base di un tipico sistema per l’elaborazione computerizzata delle immagini
Operazioni
Le operazioni svolte da un sistema di questo
tipo possono essere divise in quattro
categorie principali:
• Acquisizione
• Digitalizzazione
• Elaborazione (Processing)
• Visualizzazione (Display)
• Analisi
Qualità delle immagini biomediche (1)
• La qualità di un'immagine medica dipende dal
grado di chiarezza con cui una specifica
informazione viene percepita dal medico
• È necessario definire criteri oggettivi in grado di
quantificare il concetto di qualità di una immagine
• A tale scopo si introducono tre parametri:
- nitidezza (sharpness)
- contrasto (contrast)
- rumore (noise)
Qualità delle immagini biomediche (2)
Un parametro generale di qualità di una immagine si
può approssimativamente valutare con l'equazione:
S2 . C2
Q=
NPS
Q
S
C
NPS
: Qualità dell’immagine
: nitidezza (Sharpness)
: Contrasto (contrast)
: Spettro di Potenza del rumore (Noise)
La formula precedente può essere usata nella valutazione delle immagini mediche.
Nitidezza
• Consiste nella capacità di un sistema di permettere
di distinguere i dettagli più fini di un immagine.
• Il deterioramento dei dettagli è principalmente
dovuto alla risposta impulsiva dell'intero sistema di
immagini
• La nitidezza è valutata dalla risoluzione spaziale
dell'immagine (potere risolutivo)
– definita come la capacità di un sistema per immagini di distinguere
due piccoli punti ad alto contrasto vicini tra loro
Rumore (Noise
(Noise))
• Il rumore è di natura statistica e dipendente dal
segnale ma, senza una grossa perdita di
accuratezza, può essere considerato additivo e
bianco.
Rumore (Noise)
Information obtained in the image (measurement) that does
not contribute in its usefulness and interpretation
Contrasto
• È la possibilità di distinguere dettagli dell'immagine
a bassa differenza di luminosità rispetto al campo di
fondo (background).
• Si tratta della capacità di un sistema per immagini di
essere sensibile a piccole variazioni dell'intensità di
radiazione incidente sugli elementi sensori e di
visualizzare tali variazioni.
• Una causa della degradazione del contrasto è la
presenza di rumore.
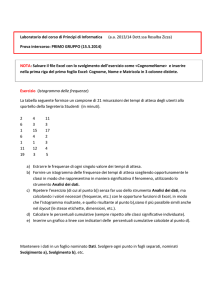
Piani anatomici
Sono 3. Ognuno di essi divide il corpo umano in due
metà
Piano sagittale:
divide le metà destra e
sinistra
Piano frontale o coronale:
divide le metà anteriore e
posteriore
Piano trasversale:
divide le metà superiore ed
inferiore
Piani anatomici
trasversale
sagittale
coronale
Discretizzazione dell’immagine digitale
DISCRETIZZAZIONE = QUANTIZZAZIONE
• SPAZIALE
•INTENSITÁ
Discretizzazione spaziale
• In una immagine digitale, l’immagine dell’oggetto che all’occhio
appare continua, viene campionata (discretizzata) in un numero
finito
di elementi (pixels) sulla griglia dell’immagine stessa.
• A ogni pixel viene assegnata una intensità pari alla media di tutti
valori di intensità dell’immagine originale nell’area dello stesso
pixel.
Caratteristiche dell’immagine
M pixels
Campo di vista
FOV=X*Y cm2
I
Y (cm)
N pixels
Area dell’immagine
A = M*N pixel
Risoluzione
(mm)
x = X / M
y = Y / N
Intensità del pixel
I = I (x, y, p )
p dipende dalla
metodica
X (cm)
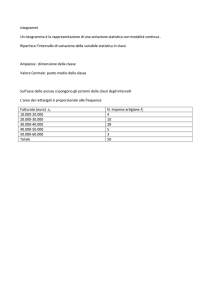
Risoluzione dell’immagine
512x512
256x256
128x128
64x64
La tomografia: pixels e voxels
E’ l’immagine bidimensionale di
una fetta di spessore z.
Spessore della
fetta
Pixel
Voxel
z
Quantizzazione di un segnale
• quantizzazione uniforme
• a ogni intervallo di valori
viene assegnato il valore
medio
• si commette un errore di
quantizzazione
segnale in ingresso
uscita discretizzata inversamente proporzionale
al numero di valori in uscita
errore di
quantizzazione
• esistono altre relazioni di
quantizzazione
(es.: logaritmica)
Livelli di grigio
Quantizzazione: conversione da valori di luminosità analogici (continui) a
discreti
• n livelli di grigio, corrispondenti a
Imax
In
n1
intensità fisiche I1, I2, . . . , In
(I1 = intensità minima, In = massima)
• range dinamico = In / I1
• L'occhio umano non distingue
intensità adiacenti Ij e Ij+1 se la
differenza è minore dell'1%: Ij+1 ≤
1.01 Ij . Allora
In ≤ 1.01n I1 n ≥ log1.01 (In / I0)
Imin
I1
0
• Per una luminosità continua:
r.d. = 100 n = 463
r.d. = 1000 n = 694
• Molti sistemi usano n = 4096.
Livelli di grigio
Pochi valori di grigio rendono più evidenti i
contorni
3413 livelli
256 livelli
16 livelli
Livelli di grigio
Piccole differenze in luminosità non sono percepite sullo
schermo
28 = 256 livelli
25 = 32 livelli
24 = 16 livelli
Un numero di valori di grigio più alto di quelli percepibili è
necessario:
• per operazioni di filtraggio
Elaborazione delle immagini
• L'obiettivo che le tecniche di elaborazione si
propongono è quello di manipolare
appropriatamente la matrice rappresentativa
dell'immagine in modo che l'immagine ottenuta sia
di qualità superiore, potendo cosi fornire ulteriori
informazioni al medico.
• Ci sono diverse tecniche di elaborazione
dell'immagine il cui impiego dipende dallo specifico
problema applicativo e dall'osservatore stesso.
Tecniche di miglioramento
Ci sono tre principali categorie di tecniche per il miglioramento
della qualità dell’immagine:
• Manipolazione della scala dei grigi (per aumentare il
contrasto)
• Image Smoothing (per diminuire il rumore)
• Image Sharpening (per diminuire lo sfocamento
dell’immagine)
L'elaborazione di immagini si può effettuare nel dominio
spaziale o nel dominio delle frequenze, poiché si possono
effettuare le operazioni di convoluzione indifferentemente in
entrambi i domini.
Trasformazione della scala dei grigi
Una trasformazione della scala dei grigi è una funzione
I’ (x, y, p ) = g [ I (x, y, p )]
• Agisce sui livelli di grigio indipendentemente dalla posizione.
• Conserva la relazione di intensità tra i livelli: se il pixel (x1,y1) è più
chiaro del pixel (x2, y2) nella immagine originale, lo sarà anche in
quella trasformata.
• Aumenta il contrasto in alcune regioni di intensità, al prezzo di
diminuirlo in altre.
• Nelle regioni dell’immagine dove vi sono pixels con valori di grigio
per cui la pendenza di g è maggiore di 1, il contrasto aumenta.
• Nelle regioni dell’immagine con valori di grigio per cui la pendenza
di g è minore di 1, il contrasto diminuisce.
• In queste ultime regioni può anche accadere che valori diversi non
si distinguano più.
Trasformazione della scala dei grigi
I’ (x, y, p ) = g [ I (x, y, p )] =
M
I (x, y, p )
M
M è il massimo livello di I
(a) Funzione g(I ) = 1 I ( = 1): lascia l’intensità invariata
(b) Funzione g(I ) > 1
( > 1): aumenta l’intensità media
dell’immagine;
il contrasto aumenta nelle zone scure e diminuisce in quelle chiare
(c) Funzione g(I ) < 1
( > 1): diminuisce l’intensità media
dell’immagine;
Trasformazione della scala dei grigi
(a) Trasformazione dei livelli di grigio che aumenta il contrasto nelle
zone scure e lo diminuisce in quelle più luminose. Può essere
utilizzata quando l’informazione clinicamente rilevante è
localizzata nelle zone ipointense, come i polmoni
(b) L’immagine originale
(c) L’immagine trasformata
Finestramento (window
window//level
level))
In molte immagini mediche il numero di
valori della scala dei grigi utili dal punto di
vista diagnostico è sensibilmente minore
di tutti quelli disponibili; usando sul
monitor tutto il range possibile si
diminuisce il contrasto visibile nella zona
di interesse.
Finestramento (window
window//level
level))
Nel range dinamico
compaiono con alta
frequenza livelli di grigio
corrispondenti a zone poco
o nulla significative
Escludere tali zone
dall’analisi cambia
significativamente
l’istogramma dei livelli
Si ha quindi una
espansione del range
“utile” su un intervallo più
ampio.
Finestramento (window
window//level
level))
• L’intervallo (finestra) viene definito da:
l centro dell’intervallo
w larghezza
• Chiamato M il massimo livello di
grigio disponibile, la funzione è
definita:
• Il contrasto fuori dalla finestra è
completamente perso.
M
l
• La parte del range compresa nella
finestra è espansa su tutto l’intervallo
di grigi disponibile.
w
M
Finestramento (window
window//level
level))
(a)
(b)
• Finestramento con l = 169 e w = 97
• Numero di livelli di grigio: 238 (a) e 97 (b)
• Non viene aggiunta informazione, si aumenta solo il contrasto
visibile
• E’ necessario partire con un numero di livelli molto alto
Sogliatura (treshholding
treshholding))
Tutti i livelli sino al valore di soglia sono
posti uguali a zero, tutti quelli sopra la
soglia uguali al massimo
Operazioni multimmagine
Somma o
immagini:
differenza
pixel
a
pixel
di
due
I+ (x, y, p ) = I1 (x, y, p ) + I2 (x, y,
p)
I (x, y, p ) = I1 (x, y, p ) I2 (x, y,
p)
Operazioni multimmagine
Se il risultato esce dal range dei valori di grigio disponibili, l’immagine
risultante si può riportare nel range con operazioni lineari. Es.: la media di
n immagini:
1
Im (x, y, p ) =n [ I1 (x, y, p ) + … + In (x, y, p
)]
La media può essere utilizzata per aumentare il rapporto S/N in immagini
statiche: l’immagine si somma, mentre il rumore, essendo casuale, si
cancella. Il rapporto S/N cresce proporzionalmente a n
a) Immagine EPI pesata in T1 (per
sua natura molto rumorosa)
b) Media di n = 16 immagini come in
(a)
Trasformazioni geometriche
• Agiscono sulle coordinate dei pixel
• Sono cambiamenti
deformazioni
di
scala
(zoom),
traslazioni,
rotazioni
e
• Una trasformazione spaziale o geometrica assegna ogni punto (x, y) a
un altro pixel di coordinate (x’, y’)
• Le trasformazioni bidimensionali (2D) più comuni si possono scrivere
usando coordinate omogenee:
x' s x
cambiament y ' 0
o di scala
1 0
0
sy
0
0 x
0 y
1 1
x ' 1 0 t x x
traslazione y ' 0 1 t y y
1 0 0 1 1
x' 1
deformazione y ' u y
1 0
ux
x ' cos
rotazione y ' sin
1 0
1
0
0 x
0 y
1 1
sin
cos
0
0 x
0 y
1 1
• La composizione di due trasformazioni corrisponde a moltiplicare le
corrispondenti matrici.
Trasformazioni geometriche
• Una generica trasformazione affine 2D
x' a11
y ' a21
1 0
a12
a22
0
t x x
t y y
1 1
dipende da sei parametri e include trasformazioni di scala, traslazioni,
deformazioni e rotazioni come casi speciali.
• Le trasformazioni affini preservano il parallelismo delle linee ma in
generale non le lunghezze e gli angoli.
• Angoli e lunghezze sono conservati da trasformazioni ortogonali (ad
es. rotazioni e traslazioni): x'
r
r
t
x
11
y ' r21
1 0
12
r22
0
t y y
1 1
x
r11 r12
R
con la condizione che la matrice
r
r
21 22
soddisfi RT R =1
Trasformazioni geometriche
• Attualmente la maggior parte delle immagini mediche sono
tridimensionali (3D). Le matrici scritte sopra possono essere
facilmente estese al caso 3D. Una generica trasformazione affine 3D
è:
x' a11
y ' a21
z' a
31
1 0
a12
a13
a22
a32
a23
a33
0
0
t x x
t y y
t y z
1 1
Istogramma di una immagine
• Le n intensità di grigio [0(n1)] si ritrovano con frequenza H(I)
• L’area dell’immagine si può allora esprimere come
n 1
A H I M N pixel
x 0
• L’istogramma dell’immagine è la rappresentazione in grafico di
H(I)
H(I)
I
Istogramma di una immagine
• La probabilità di trovare ciascun livello di grigio è
p x I
H I
n 1
H I
x 0
n 1
con, evidentemente,
p I 1
I
x 0
• Si definisce funzione di probabilità cumulata la funzione
I
F I pI d
0
Modificazione dell'Istogramma (Histogram
(Histogram
Modification)) - Espansione del contrasto
Modification
• Le tecniche di modificazione dell'istogramma cercano
di aumentare il contrasto dell'immagine alterandone
l'istogramma.
• Il nuovo istogramma risultante da tale processo può
essere:
• un istogramma che copra tutta la gamma dei livelli
di grigio disponibile;
• un istogramma con un ugual numero di pixel per
livello di grigio;
• quello di un immagine nota.
Normalizzazione (Stretching)
• Può accadere che l’istogramma di una immagine non copra
l’intera dinamica disponibile, facendo quindi perdere la
percezione del contrasto.
• Per utilizzare l’intera scala di grigi disponibile si effettua una
“Normalizzazione” (Stretching)
• L’operazione è:
I’MAX I’min
I’ (x, y, p ) = { [ I (x, y, p )] Imin }
+
IMAX Imin
I’
min
dove IMAX e Imin sono i valori massimo e minimo della vecchia
immagine e I’MAX e I’min i corrispondenti valori della nuova.
Normalizzazione (Stretching)
Equalizzazione dell‘istogramma
• La procedura di equalizzazione dell’istogramma è una
soluzione molto diffusa in sistemi per le immagini mediche.
• Consiste nell’operare una trasformazione che distribuisca
uniformemente i livelli di grigio
• Questo aumenta il contrasto “appiattendo” l'istogramma di
partenza e aumentando il range dinamico
Equalizzazione dell'Istogramma
• Sia g(I) una trasformazione applicata ai livelli di grigio
dell'immagine originale, monotona crescente in [0 ÷ n 1], ed
I’ è la variabile casuale dei livelli di grigio dell'immagine
elaborata:
I’ = g(I ). A I’ è associata la funzione densità di probabilità
pI’(I’).
• Se pI(I ) e g(I) sono note, e g(I) è continua e differenziabile,
tutti i punti di [I, I + dI] sono trasformati in punti di [I’, I’ + dI’].
dI
Le aree di probabilità pI(I)dI e pI’(I)dI’ sono uguali:
p I I dI p I ' I ' dI ' p I ' I ' pI I
dI '
Equalizzazione dell'Istogramma
• Si consideri ora la seguente funzione di trasformazione:
I
I ' g I n 1 p I d
0
I’ è monotona crescente. Per valutare pI’(I’) si può usare la
Regola di Leibniz: la derivata di un integrale definito rispetto al
suo estremo superiore è l'integrando valutato nel suddetto
estremo:
dI ' dg ( I )
n 1 pI I
dI
dI
• Si ottiene quindi la densita di probabilità pI’(I’)
1
dI
1
1
p I ' I ' pI I
pI I
pI I
dI '
dI ' dI
n 1 p I I n 1
Equalizzazione dell'Istogramma
Operatori puntuali e locali
Image Smoothing
• L' Image Smoothing tenta di ottenere una soppressione del
rumore, che per varie ragioni risiede nelle immagini
– errori introdotti dai sensori, trasmissione, natura statistica delle radiazioni,
campionamento,quantizzazione, ecc.
• Normalmente, il rumore riscontrabile nelle immagini mediche
è di carattere statistico ed occupa principalmente la banda di
alta frequenza delle immagini.
• Le tecniche di image smoothing sono in effetti tecniche di
soppressione delle alte frequenze o meglio di filtraggio
passa-basso.
– la soppressione di informazioni utili dell'immagine ad alta frequenza
• Il risultato è uno smussamento (sfocamento) dei contorni ed
una degradazione del dettaglio dell'immagine. Bisogna
dunque essere cauti nel grado di smoothing da usare.
Smoothing spaziale
• Riduce gli effetti di variazioni ad alta frequenza
“blurring sharp edges”
Smoothing spaziale
Smoothing spaziale
Perché farlo?
• Accresce il rapporto segnale/rumore
• Permette di mediare su diversi soggetti
• Permette di usare la teoria di campo Gaussiana
Smoothing spaziale
Perché farlo?
• Aumenta il rapporto segnale/rumore
– Dipende dalla dimensione relativa del kernel di
smoothing e dagli effetti da rilevare
– Il kernel di smoothing dà la dimensione del
segnale atteso
– Praticamente: FWHM ≥ 3 x dimensione del
voxel
– Si può pensare di variare la dimensione del
kernel in differenti regioni cerebrali, e.g.
ippocampus vs. corteccia parietale
Smoothing spaziale
Perché farlo?
• Permette di mediare tra diversi soggetti
– Riduce l’influenza di differenze funzionali e/o anatomiche
intersoggetto
– Anche dopo riallineamento e normalizzazione, può
persistere una variabilità residuale intersoggetto
– L’ “ammorbidimento” dei dati aumenta la probabilità di
identificare caratteristiche comuni nelle attivazioni cerebrali
tra diversi soggetti, ma fa perdere specificità anatomiche
(“trade-off”)
Smoothing spaziale
Perché farlo?
• Permette l’uso di un modello Gaussiano
– Assume termini di errore in forma sostanzialmente
Gaussiana
– Richiede che la FWHM sia sostanzialmente maggiore della
dimensione del voxel
– Permette il test di ipotesi e dioperare con problemi di
comparazioni multiple nell’imaging funzionale…
Smoothing spaziale
Come si fa?
• Tipicamente, nell’ imaging
functional, si usa un kernel di
smoothing Gaussian
– La forma è simile alla curva di
distribuzione normale a campana
– La larghezza viene usualmente
descritta usando la FWHM.
– e.g., kernel con FWHM di 10mm :
-5
0
5
Smoothing spaziale
Come si fa?
• Un kernel Gaussian definisce una formafunzionale
che si usa successivamente per calcolare la media
pesata di ciascun punto relativamente ai suoi vicini
Raw data
x
Gaussian function
function
=
Smoothed data
Spatial Smoothing
Come si fa?
• Un kernel Gaussiano definisce una forma funzionale
che si usa successivamente per calcolare la media
pesata di ciascun punto relativamente ai suoi vicini
Raw data
x
Gaussian function
function
=
Smoothed data
Immagine esempio
Image sharpening
• Tecniche impiegate per ridurre lo sfuocamento (blurring) di una
immagine.
• Lo sfocamento dell'immagine (image blurring) consiste in perdita
di dettaglio dell'immagine e della chiarezza dei contorni, dunque
in una soppressione delle frequenze medio alte dell'immagine.
• Tecniche di image sharpening (o deblurring) compiono
l'operazione di esaltare le alte frequenze (filtro passa-alto).
• Si deve esercitare cautela nello scegliere l'intensità di filtraggio
passa-alto da applicare, poiché l’operazione fa aumentare il
rumore dell'immagine (che risiede particolarmente, nelle alte
frequenze dello spettro dell'immagine;
– in questa zona l'ampiezza dello spettro di potenza del rumore può essere comparabile (se non
superiore) a quello del segnale, dunque, un filtraggio passa-alto può avere l'effetto negativo di
incrementare notevolmente il rumore
• Tecniche impiegate per ridurre lo sfuocamento (blurring) di una
immagine.
• Lo sfocamento dell'immagine (image blurring) consiste in perdita
di dettaglio dell'immagine e della chiarezza dei contorni, dunque
in una soppressione delle frequenze medio alte dell'immagine.
• Tecniche di image sharpening (o deblurring) compiono
l'operazione di esaltare le alte frequenze (filtro passa-alto).
• Si deve esercitare cautela nello scegliere l'intensità di filtraggio
passa-alto da applicare, poiché l’operazione fa aumentare il
rumore dell'immagine (che risiede particolarmente, nelle alte
frequenze dello spettro dell'immagine;
– in questa zona l'ampiezza dello spettro di potenza del rumore può essere comparabile (se non
superiore) a quello del segnale, dunque, un filtraggio passa-alto può avere l'effetto negativo di
incrementare notevolmente il rumore