")
Lezione 8: Sistemi ad un grado di libertà:
l’oscillatore elementare (8)
Federico Cluni
31 marzo 2015
1
Fattore di amplificazione in termini di velocità e accelerazione
Nel caso l’oscillatore elementare sia soggetto ad una forzante sinusoidale:
F (t) = F0 sin ωt
(1)
la sua risposta è data da:
F0
fD sin (ωt − ψ)
k
(2)
F0
F0 ω
fD ω cos (ωt − ψ) = √
fD sin (ωt − ψ)
k
k m ω1
(3)
F0
F0 ω 2
fD ω 2 sin (ωt − ψ) = −
fD sin (ωt − ψ)
k
m ω12
(4)
x(t) =
quindi la sua velocità è:
ẋ(t) =
e la sua accelerazione da:
ẍ(t) = −
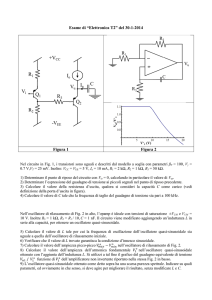
A partire dalle precedenti, si possono definire, oltre al fattore di amplificazione in termini di
spostamento, fD , il fattore di amplificazione in termini di velocità, fV :
fV = α · fD
(5)
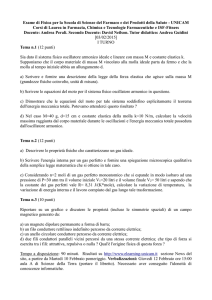
e il fattore di amplificazione in termini di accelerazione:
fA = α2 · fD
1
(6)
ν
ν
ν
ν
ν
ν
ν
5.00
fV = α · fD
4.00
3.00
= 0.00
= 0.10
= 0.15
= 0.30
= 0.50
= 0.80
= 0.99
2.00
1.00
0.000
0.00
0.50
1.00
1.50
α
2.00
2.50
3.00
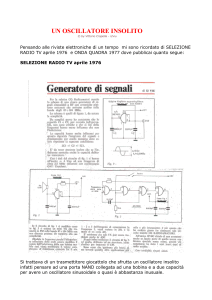
Figura 1: Andamento di fV .
ν
ν
ν
ν
ν
ν
ν
5.00
fA = α 2 · fD
4.00
3.00
= 0.00
= 0.10
= 0.15
= 0.30
= 0.50
= 0.80
= 0.99
2.00
1.00
0.000
0.00
0.50
1.00
1.50
α
2.00
2.50
Figura 2: Andamento di fA .
In particolare fA rappresenta il rapporto (a meno del segno) fra l’accelerazione massima
2
3.00
subita dall’oscillatore e quella cui sarebbe sottoposto se la massa fosse isolata (ovvero senza le
forze di richiamo elastico e viscosa).
Si noti come il massimo di fV sia sempre raggiunto per α = 1, mentre il massimo per fA si
1
ha per α = √
.
1 − 2 ν2
2
Strumenti di misura per le vibrazioni
In molti aspetti dell’ingegneria è importante poter misurare le vibrazioni di un corpo, si pensi ad
esempio alle strutture sottoposte all’azione sismica. Nella sua forma più semplice, gli strumenti
utilizzati sono trasduttori costituiti da un oscillatore elementare posto all’interno di un elemento
reso solidale al corpo di cui si vogliono misurare le vibrazioni. Si presentano nel seguito le
principale applicazioni.
Accelerometri
Si consideri che il moto del terreno sia rappresentato da:
ü(t) = üg sin ω t
(7)
In tal caso la risposta dell’oscillatore, è data da:
−m üg
1
ψ
x(t) =
fD sin (ωt − ψ) = − 2 fD üg sin ω t −
k
ω
ω1
(8)
Quindi lo spostamento subito dall’oscillatore (e registrato dallo strumento) è l’accelerazione
ψ
imposta alla base, con uno sfasamento temporale di , divisa per ω12 fD . In generale quindi,
ω
sia lo sfasamento che l’ampiezza dipendono dalla pulsazione dello spostamento impresso, perciò lo spostamento non sarà una rappresentazione fedele dell’accelerazione imposta. Tuttavia,
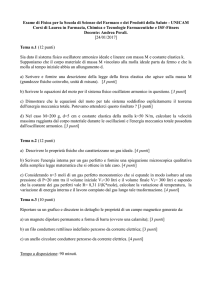
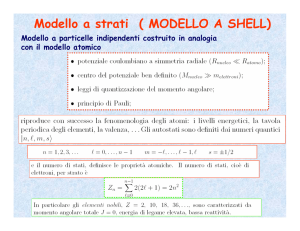
adottando smorzamenti elevati, ad esempio ν = 0.65 ÷ 0.75, si ha che per pulsazioni tali che
0 ≤ ω/ω1 ≤ 0.50 il valore di fD è pressoché costante (variazioni inferiori del 2.5 %), mentre il
valore di ψ è pressoché lineare in ω/ω1 , ovvero ψ/ω è indipendente da ω e quindi lo sfasamento
temporale è costante. Per cui tutte le componenti armoniche sono scalate della stessa quantità
e sfasate dello steso tempo, per cui lo spostamento è una rappresentazione scalata (secondo il
fattore ω12 ) e sfasata delle accelerazioni imposte.
π/2
ν = 0.65
ν = 0.70
ν = 0.75
1.000
ψ
fD
1.025
π/4
ν = 0.65
ν = 0.70
ν = 0.75
0.975
0.950
0.00
0.25
0.50
α
0.75
0
0.00
1.00
(a) Fattore di amplificazione
0.25
0.50
α
0.75
1.00
(b) Sfasamento
Figura 3: Fattore di amplificazione e sfasamento.
Ovviamente, lo smorzamento elevato riduce anche il transitorio iniziale, per cui si può
considerare come tutta la risposta sia in condizioni di regime.
3
Sismografi
Si consideri che il moto del terreno sia rappresentato da:
u(t) = ug sin ω t
(9)
ü(t) = −ug ω 2 sin ω t
(10)
si ha quindi:
In tal caso la risposta dell’oscillatore è data da:
x(t) =
m ug ω 2
ω2
fD A sin (ωt − ψ) = 2 fD ug sin (ωt − ψ) = fA ug sin (ωt − ψ)
k
ω1
(11)
dove si è usato il fattore di amplificazione fA introdotto in precedenza. Nel caso in cui ω1
sia molto basso allora la funzione tende ad 1 per qualsiasi valore di ν, mentre ψ tende a π. Si
ha perciò:
x(t) = −ug sin ωt
(12)
Lo spostamento dell’oscillatore è allora pari allo spostamento imposto al piede cambiato di
segno (il che è inessenziale). Si noti come in questo caso non ha importanza lo smorzamento.
Si noti che:
y(t) = x(t) + u(t) = 0
(13)
ovvero la massa tende a rimanere ferma nel sistema di riferimento inerziale.
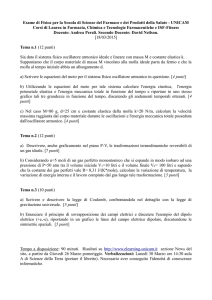
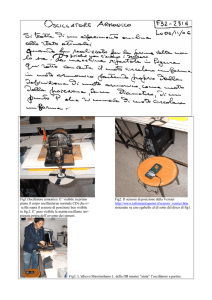
Questo è il principio di funzionamento dei sismografi, che consistono essenzialmente in una
massa elevata collegata ad un supporto solidale al terreno da un elemento di bassa rigidezza: le
registrazioni dello spostamento della massa forniscono la storia di spostamenti imposti alla base.
Figura 4: Sismografo.
4
Si noti come nessuna ipotesi è stata introdotta finora sullo smorzamento, in quanto l’andaω2
mento di 2 fD per α 1 è indipendente da ν. Tuttavia, al fine di smorzare rapidamente le
ω1
oscillazioni libere, è comunque opportuno che lo smorzamento sia elevato: ad esempio si può
immergere la massa in un fluido molto viscoso, o collegarla direttamente ad un dispositivo con
elevato ν.
3
Oscillatori non lineari
L’equazione del moto dell’oscillatore elementare trattata finora:
m ẍ + cẋ + k x = F (t)
(14)
è un’equazione differenziale lineare a coefficienti costanti.
Tuttavia in alcuni casi il modello lineare può rappresentare in maniera limitata il fenomeno
fisico, ad esempio solo per piccoli spostamenti e deformazioni. In tali casi bisogna tener conto
della non linearità del sistema, che può interessare tutti e tre i termini a primo membro: la forza
inerziale (m ẍ nel caso lineare), lo smorzamento( c ẋ nel caso lineare), e la forza di reazione (k x
nel caso lineare).
Tuttavia nel prosieguo non si terrà conto della non linearità del termine inerziale.
3.1
Non linearità dello smorzamento
Si ha smorzamento non lineare quando le forze di smorzamento non sono direttamente proporzionali alla velocità.
Una semplificazione si può avere quando tali forze hanno comunque incidenza modesta rispetto alle altre forze in gioco. In tal caso si può introdurre uno smorzatore lineare equivalente,
nel senso che è in grado di dissipare in un ciclo la stessa energia.
L’energia dissipata in un ciclo da un oscillatore con smorzamento lineare, dalla (36) della
Lezione 4, è la seguente:
ν F02
i
h
W =
(15)
2
m ω1 α1 − α + 4 ν 2
che, tenendo conto che lo spostamento massimo a regime xmax vale:
xmax =
F0
1
q
k
(1 − α2 )2 + 4 ν 2 α2
(16)
diviene:
ν k 2 x2max
1
= c ω 2 x2max
1
2
m ω1 2
α
In un ciclo l’energia dissipata è quindi:
W =
WT =W
2π
= π c ω x2max
ω
(17)
(18)
Nel caso che la forza smorzante sia non lineare l’energia dissipata in un ciclo si indica con Ed .
Tale energia consente di determinare il valore dello smorzamento equivalente ceq (ovvero quello di
un dispositivo viscoso lineare che in un ciclo dissipa la stessa quantità di energia) uguagliandola
alla (18):
Ed
W T = Ed ⇒ ceq =
(19)
π ω x2max
5
3.1.1
Smorzamento per attrito
Si ipotizzi ora che sull’oscillatore elementare agisca una forza di tipo attritivo (come se la massa
invece che scorrere su dei rulli fosse appoggiata a terra).
Si assume che l’attrito agente durante il moto sia del tipo alla Coulomb, ovvero la forza di
attrito è indipendente dalla velocità con valore assoluto pari ad una frazione della forza ortogonale
alla superficie di contatto (coefficiente di attrito), supposta costante, e direzione opposta al moto.
Indicando con Fa il valore assoluto della forza di attrito la forza agente sull’oscillatore è pari
a:
ẋ
R=−
Fa = cost
(20)
|ẋ|
L’energia dissipata in un ciclo di ampiezza xmax è ovviamente:
Ed = 4 Fa xmax
(21)
4 Fa
π ω xmax
(22)
2 Fa
π k α xmax
(23)
e quindi:
ceq =
Di conseguenza,
νeq =
Introducendo tale valore nell’espressione del fattore di amplificazione si ha:
xmax =
F0
1
s
k
2
2
(1 − α ) +
4 Fa
π k xmax
2
(24)
Risolvendo per xmax si ottiene:
s
xmax
1−
F0
=
k
4 Fa
π F0
2
|1 − α2 |
(25)
e da questa:
νeq
1 − α2 2 Fa
1
s
=
π F0
α
4 Fa 2
1−
π F0
(26)
Si fanno le seguenti posizioni:
4 Fa
π F0
β
1 1
= − α p
2 α
1 − β2
β=
νeq
(27)
(28)
La (28) richiede che β < 1, ovvero:
F0 >
4
Fa
π
(29)
In caso contrario la forzante esterna, sinusoidale di ampiezza F0 , F0 sin ω t, è troppo piccola
rispetto all’attrito e l’oscillatore rimane fermo.
6
")