Elementi di modellistica
di Sistemi Dinamici
A. Pironti
Dipartimento di Informatica e Sistemistica
Università degli Studi di Napoli Federico II
Elementi di Modellistica dei Sistemi Dinamici
Elementi di Modellistica dei Sistemi Dinamici
1. Sistemi Meccanici
Un sistema meccanico consiste di un insieme di componenti elementari tra
loro variamente interconnessi. I componenti meccanici elementari sono di tre
tipi:
elementi di inerzia
elementi elastici
elementi di attrito.
Pagina 1 di 81
Elementi di Modellistica dei Sistemi Dinamici
1.1.
Elementi di inerzia
Gli elementi di inerzia sono di due tipi: masse e momenti
s(t)
T(t)
F(t)
m
F (t ) ms(t )
(t)
Ja
a
T (t ) J a(t )
Pagina 2 di 81
Elementi di Modellistica dei Sistemi Dinamici
1.2.
Elementi elastici
s1 (t)
s2 (t)
F(t)
Molla Traslatoria
F(t)
k
F (t ) k s2 (t ) s1 (t )
1(t)
T(t)
k
T(t)
2(t)
Molla torsionale
T (t ) k 1 (t ) 2 (t )
Pagina 3 di 81
Elementi di Modellistica dei Sistemi Dinamici
Gli elementi elastici sono assunti essere privi di massa;
La costante k che compare nel legame tra forza (o coppia) ed
accelerazione (o accelerazione angolare) prende il nome di costante di
rigidezza;
L’inverso della costante di rigidezza c=1/k prende il nome di cedevolezza;
Pagina 4 di 81
Elementi di Modellistica dei Sistemi Dinamici
1.3.
Elementi di attrito viscoso
s1(t)
s2(t)
F(t)
F(t)
F (t ) bs2 (t ) s1 (t )
1 (t)
T(t)
T(t)
T (t ) b 1 (t ) 2 (t )
2 (t)
Pagina 5 di 81
Elementi di Modellistica dei Sistemi Dinamici
Gli elementi di attrito viscoso (detti anche smorzatori) sono assunti essere
privi di massa ed elasticità;
La costante b è detta coefficiente di attrito viscoso (coefficiente di attrito
viscoso torsionale per uno smorzatore torsionale)
Pagina 6 di 81
Elementi di Modellistica dei Sistemi Dinamici
1.4. Equazioni del moto di un sistema di corpi rigidi:
Approccio di Newton
Le equazioni del moto di un corpo rigido si possono scrivere applicando la seconda legge
di Newton. Questa può essere formulata come segue.
Seconda legge di Newton per moti traslatori. Consideriamo un corpo rigido di
massa m. Comunque scelta una direzione d, se F è la somma delle componenti, lungo
la direzione data, di tutte le forze agenti sul corpo, si ha:
ΣF ma
dove a è la componente dell'accelerazione nella direzione scelta.
Seconda legge di Newton per moti rotatori. Consideriamo un corpo rigido libero di
ruotare intorno ad un asse a, e sia Ja il momento di inerzia del corpo intorno a
quell'asse. Detta T la somma di tutte le coppie agenti intorno all'asse t si ha:
ΣT J t
dove è l'accelerazione angolare del corpo intorno all'asse a.
Pagina 7 di 81
Elementi di Modellistica dei Sistemi Dinamici
Momento d'inerzia. Consideriamo un corpo rigido C libero di ruotare intorno ad un
asse a, e sia dm un elemento di massa a distanza r dall'asse a. Il momento di inerzia
del corpo intorno all'asse a è definito come:
J a r 2 dm
C
a
r
dm
C
Pagina 8 di 81
Elementi di Modellistica dei Sistemi Dinamici
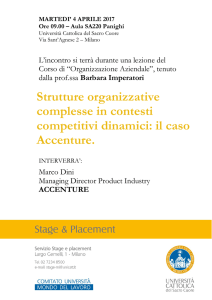
Disco sottile (s<<R)
y
M = massa totale
s R
R2
Jx Jy M
4
2
R
Jz M
2
z
R
x
Corona circolare sottile (s<<R)
y
M = massa totale
R2 r2
Jx Jy M
4
R2 r2
Jz M
2
s R
r
z
R
x
Cilindro
z
M = massa totale
R
L
y
x
Jx Jy M
3R 2 L2
12
R2
Jz M
2
Pagina 9 di 81
Elementi di Modellistica dei Sistemi Dinamici
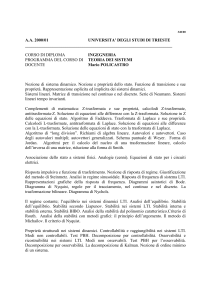
Cilindro cavo
z
M = massa totale
R
r
L
y
x
3( R 2 r 2 ) L2
Jx Jy M
12
R2 r2
Jz M
2
Sfera
R
x
M = massa totale
x
= densità
M
4 3
R
3
J xx M
z
x
z
x
L
2 2
R
5
Barretta
M = massa totale
L2
J xx M
12
( L sen ) 2
J zz M
12
Pagina 10 di 81
Elementi di Modellistica dei Sistemi Dinamici
Il calcolo del momento di inerzia di un corpo rigido può essere fatto con
l’ausilio della tabella precedente, e del seguente teorema:
Momento d'inerzia rispetto ad un asse parallelo ad uno passante per il
baricentro. Sia Jr0 il momento d'inerzia di un corpo di massa m rispetto ad
una retta r0 baricentrale (cioè passante per il baricentro) e sia r una retta
parallela a r0 e a distanza da essa. Utilizzando la definizione di momento
d'inerzia si dimostra che:
J r J r0 m 2
Pagina 11 di 81
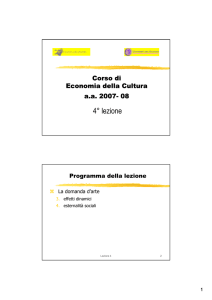
Elementi di Modellistica dei Sistemi Dinamici
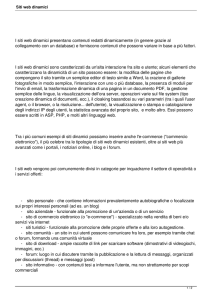
Esempio. Si consideri il sistema in Figura, in un cilindro omogeneo di massa m e raggio
R rotola su una superficie piana. Si vuole calcolare il momento di inerzia Jr del cilindro
rispetto alla linea di contatto con la superficie.
Si ha:
J r J r0 mR 2
Poiché
R2
J r0 m
2
r0
r
risulta
Jr
3
mR 2
2
Pagina 12 di 81
Elementi di Modellistica dei Sistemi Dinamici
1.5.
Esempi di modelli di sistemi meccanici semplici
La scrittura del modello di un sistema meccanico richiede normalmente i
seguenti passi:
Individuazione del numero di gradi di libertà del sistema. Questo è
definito come il minimo numero di coordinate posizionali necessarie per
individuare, in un generico istante t, la posizione completa del sistema
meccanico (inteso come insieme di tutti i componenti elementari).
Scelta delle coordinate posizionali da utilizzare per la scrittura delle leggi
del moto (leggi di Newton).
Scrittura delle equazioni del moto.
Scelta delle variabili di stato e manipolazione delle relazioni costitutive
così da pervenire ad una rappresentazione i-s-u.
Pagina 13 di 81
Elementi di Modellistica dei Sistemi Dinamici
Individuazione del numero di gradi di libertà
L'individuazione del numero di gradi di libertà di un sistema meccanico non è
sempre un'operazione semplice, e questo principalmente per la presenza di
vincoli che limitano i movimenti degli elementi di massa del sistema.
Per sistemi costituiti da punti materiali interconnessi, si ha:
3 l
dove l è il numero di equazioni di vincolo imposte dagli elementi di
interconnessione tra i punti materiali.
Se il sistema meccanico è vincolato ad un moto planare si ha invece
2 l
Nel caso di sistemi composti da corpi rigidi, bisogna invece tenere conto che
ciascun corpo rigido è dotato di 6 gradi di libertà (3 nel caso di moto planare),
ad esempio questi possono essere le coordinate del centro di massa, e tre
angoli che definiscono la posizione relativa del corpo rispetto al centro di
massa.
Pagina 14 di 81
Elementi di Modellistica dei Sistemi Dinamici
Scelta delle coordinate posizionali
Come si vedrà attraverso una serie di esempi, non sempre è conveniente
scegliere le coordinate posizionali rispetto ad un sistema di riferimento
cartesiano. Ad esempio nel caso di moti rotatori è quasi sempre conveniente
utilizzare sistemi di coordinate polari.
Scrittura delle equazioni del moto
Le equazioni del moto si ottengono generalmente scrivendo le equazioni di
Newton per ciascun elemento di massa e per ciascuna delle sue coordinate
posizionali scelte. Laddove le coordinate posizionali necessarie per la scrittura
delle leggi di Newton siano in numero maggiore dei gradi di libertà, bisogna
portare in conto altrettante equazioni di vincolo. L'insieme di tutte le equazioni
ottenute vengono chiamate "relazioni costitutive" del sistema.
Pagina 15 di 81
Elementi di Modellistica dei Sistemi Dinamici
Scelta delle variabili di stato e manipolazione delle
costitutive così da pervenire ad una rappresentazione i-s-u
relazioni
Definizione di Sistema. Dato un sottoinsieme T di R, un insieme URr
detto insieme dei valori di ingresso, un insieme U di funzioni u(.) definite in
T e a valori in U, detto insieme delle funzioni di ingresso, un insieme YRm
di valori di y(t), detto insieme dei valori di uscita, un insieme XRn di valori
di x(t), detto insieme dei valori di stato, è detto sistema la coppia di
equazioni:
x (t ) f ( x(t ), u (t ), t ) ,
x(t0 ) x0
y (t ) ( x(t ), u (t ), t )
Le equazioni viste sopra prendono il nome di modello implicito ingressostato-uscita di un sistema a tempo continuo. La prima equazione è detta
equazione di stato, e la funzione f è detta funzione generatrice; la seconda
equazione è detta equazione d'uscita, e la funzione è detta trasformazione
d'uscita. Un modello implicito i-s-u viene anche sinteticamente indicato con
la tripla (X, f, ).
Pagina 16 di 81
Elementi di Modellistica dei Sistemi Dinamici
Per quanto riguarda la scelta delle variabili di stato, queste, nella quasi
totalità dei casi, possono essere assunte coincidenti con coordinate
posizionali (coordinate generalizzate) e con le loro derivate temporali (velocità
generalizzate).
In alcuni casi, tuttavia, tale scelta non porta ad un modello i-s-u nella forma
standard. In tal caso bisogna ricorrere a tecniche "ad hoc" la cui descrizione
esula dagli scopi di questo corso.
Pagina 17 di 81
Elementi di Modellistica dei Sistemi Dinamici
Esempio 1.
Equazioni
x 1 (t ) x 2 (t )
k
b
1
x1 (t ) x 2 (t ) u (t )
m
m
m
y ( t ) x1 ( t )
x 2 (t )
dove
x1 (t ) s(t ), x2 (t ) s(t ), u(t ) F (t ), y(t ) s(t )
Pagina 18 di 81
Elementi di Modellistica dei Sistemi Dinamici
Esempio 2.
Equazioni:
F(t)
s(t)
m
y 0
b
k1
0
x k1 k 2
m
k2
1 0
b x 1 u
m m
1x (0)u
dove:
mg
, x2 (t ) s(t ),
k1 k 2
u (t ) F (t ), y (t ) s(t )
x1 (t ) s (t )
Pagina 19 di 81
Elementi di Modellistica dei Sistemi Dinamici
Esempio 3.
Equazioni:
O
x1 (t ) x 2 (t )
g
sen x1 (t )
L
y (t ) x1 (t )
x 2 (t )
L
m
dove
mg
u (t ) 0;
y(t ) (t );
x1 (t ) (t ); x2 (t ) (t )
Pagina 20 di 81
Elementi di Modellistica dei Sistemi Dinamici
Esempio 4.
Equazioni:
x1 (t ) x 2 (t )
L
dove
F
mg
2
3gb 2
x 2 (t )
x (t )
2 1
La
y (t ) x1 (t )
mg
2
u (t ) 0;
y(t ) (t );
x1 (t ) (t ); x2 (t ) (t )
m
2b
2a
Pagina 21 di 81
Elementi di Modellistica dei Sistemi Dinamici
Esempio 5.
Equazioni:
a
x1 (t ) x 2 (t )
ka 2
b
x 2 (t ) 2 x1 (t ) x 2 (t )
m
mL
y (t ) x1 (t )
k
m
dove
u (t ) 0;
b
y(t ) (t );
x1 (t ) (t ); x2 (t ) (t )
L
Pagina 22 di 81
Elementi di Modellistica dei Sistemi Dinamici
Esempio 6.
s(t)
m
Equazioni:
ms k ( s z ) b( s z )
forma i-u
b
k/2
my by ky bu ku
k/2
z(t)
Pagina 23 di 81
Elementi di Modellistica dei Sistemi Dinamici
Esempio 7.
s2(t)
s1(t)
k1
F1 (t)
F2(t)
k2
k3
m2
m1
b1
0
k1 k 2
m
1
x
0
k2
m2
b3
b2
1
0
b b2
1
m1
k
2
m1
0
0
b2
m2
k 2 k3
m2
0
b2 1
m1 m1
x
0
1
b2 b3
0
m2
0
0
0
u
0
1
m2
u1 (t ) F1 (t ); u 2 (t ) F2 (t );
y1 (t ) s1 (t );
x1 (t ) s1 (t );
y 2 (t ) s 2 (t );
x2 (t ) s1 (t );
x3 (t ) s 2 (t );
x4 (t ) s2 (t )
1 0 0 0 0 0
x
u
y
0
0
1
0
0
0
Pagina 24 di 81
Elementi di Modellistica dei Sistemi Dinamici
1.6.
Equazioni della meccanica nella IIa forma
Se la massa o il momento di inerzia di un sistema meccanico risulta essere
dipendente dal tempo allora bisogna modificare leggermente le equazioni
dell’approccio di Newton, ottenendo
d (mv)
F
dt
(legge di conservazione della quantità di moto)
d ( J t )
T
dt
(legge di conservazione del momento della quantità di moto)
Pagina 25 di 81
Elementi di Modellistica dei Sistemi Dinamici
1.7.
Ruote dentate
Gli accoppiamenti a ruote dentate, o riduttori, sono dei dispositivi
meccanici che consentono di trasmettere il moto e la potenza meccanica
tra due alberi in rotazione variandone le caratteristiche di coppia e
velocità angolare.
Per questo motivo essi sono anche detti trasformatori meccanici. Essi
sono utilizzati per amplificare coppie, ridurre velocità, o comunque per
realizzare il migliore accoppiamento meccanico tra sorgente di potenza e
carico meccanico.
L’albero su cui agisce la coppia esterna che imprime il moto al sistema è
detto albero motore, mentre l’altro è detto albero mosso o utilizzatore.
Pagina 26 di 81
Elementi di Modellistica dei Sistemi Dinamici
La schematizzazione di un accoppiamento a ruote dentate ideale è mostrata in
Figura.
albero
motore
T1
1
r1
r2
albero
mosso
2
T2
Nella schematizzazione ideale si assume che sia le ruote che gli alberi siano
privi di massa, elasticità e attrito.
Pagina 27 di 81
Elementi di Modellistica dei Sistemi Dinamici
Le relazioni che legano le grandezze meccaniche relative all’albero motore e
all’albero mosso sono:
Uguaglianza tra le velocità tangenziali delle ruote:
1r1 2 r2
e quindi:
2 r1
n
1 r2
dove n è detto rapporto di riduzione.
Uguaglianza tra le potenze disponibili sui due alberi
T11 T22
e quindi:
T2 1 r2 1
T1 2 r1 n
Pagina 28 di 81
Elementi di Modellistica dei Sistemi Dinamici
Esempio 10.
b1
Tm
J1
1
r1
b2
2
Jc
r2
J2
b
b1 12
1
n
x
x
u
J
J
n J 2 J c 21
J 2 J c 21
n
n
yx
y (t ) 2 (t );
u (t ) Tm (t );
x(t ) 2 (t )
Pagina 29 di 81
Elementi di Modellistica dei Sistemi Dinamici
2. Sistemi Elettromeccanici
Un sistema elettromeccanico è un sistema in grado di trasformare potenza
elettrica in potenza meccanica (motore) o viceversa (generatore).
Tra i vari sistemi elettromeccanici, quelli probabilmente più utilizzati in pratica
sono i motori elettrici che convertono energia elettrica in energia meccanica di
rotazione, e che pertanto vengono utilizzati per la movimentazione di carichi
meccanici.
Vi sono diversi tipi di motori elettrici basati su diversi principi di
funzionamento e dotati di caratteristiche diverse in termini di massima
velocità di rotazione, massima coppia, e così via. Noi vedremo le
caratteristiche del motore a corrente continua:
Pagina 30 di 81
Elementi di Modellistica dei Sistemi Dinamici
2.1.
Motore elettrico in corrente continua
Il principio di funzionamento di un motore elettrico in corrente continua è
basato su due leggi fisiche. La prima, diretta conseguenza della legge di
Lorentz, dice che su un conduttore rettilineo di lunghezza percorso da una
corrente i e immerso in un campo di induzione magnetica B agisce una forza
meccanica F data da:
F i B
dove è il vettore avente modulo , direzione e verso della corrente. Tale
forza, pertanto, ha direzione ortogonale al piano formato da e B , verso
ricavato con la regola del cavatappi, e modulo pari a:
F i B sin
dove è l’angolo tra il conduttore e il campo magnetico.
Pagina 31 di 81
Elementi di Modellistica dei Sistemi Dinamici
In Figura è riportata la forza agente nel caso particolare in cui il conduttore è
ortogonale al campo.
B
i
F
La seconda, diretta conseguenza della legge di Lenz, dice che allorché un
v
conduttore rettilineo di lunghezza
si muove con velocità
in un campo
magnetico di induzione B , ai suoi capi si manifesta una forza elettromotrice
indotta e il cui valore è dato da:
e (v B )
dove il verso di è quello assunto come positivo per la determinazione della
f.e.m. e.
Pagina 32 di 81
Elementi di Modellistica dei Sistemi Dinamici
L’effetto di tale forza elettromotrice è tale che
se il conduttore fosse chiuso su un circuito, essa farebbe circolare una
corrente che, a sua volta svilupperebbe una forza meccanica che si
opporrebbe al moto del conduttore.
In maniera duale, se il moto del conduttore fosse dovuto ad una corrente
in esso circolante, la forza elettromotrice indotta si opporrebbe a quella
che genera la corrente.
Per tale motivo la f.e.m. e dovuta alla legge di Lenz è detta forza
controelettromotrice (f.c.e.m.). In Figura è riportato il caso in cui la
velocità, il campo e il conduttore sono tra loro ortogonali e costituiscono
una terna levogira.
B
M
v
N
Pagina 33 di 81
Elementi di Modellistica dei Sistemi Dinamici
In tal caso si ha:
e VNM vB
Come si può notare, essendo tale f.e.m. positiva tra N e M, chiudendo il
conduttore su un circuito esterno farebbe circolare una corrente nel verso che
va da M a N; la forza prodotta da tale corrente avrebbe verso opposto a v.
Pagina 34 di 81
Elementi di Modellistica dei Sistemi Dinamici
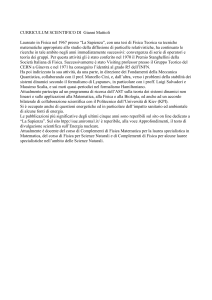
Sulla base di tali leggi, supponiamo di disporre, nello spazio compreso tra i
poli di un magnete permanente, una spira rettangolare libera di ruotare
intorno al proprio asse come mostrato in Figura.
N
S
contatti striscianti
Pagina 35 di 81
Elementi di Modellistica dei Sistemi Dinamici
Connettendo gli estremi di tale spira ad un dispositivo di commutazione
collegato ad un circuito esterno in cui viene fatta circolare corrente, si ha che
la spira tenderà a ruotare fino a disporre il suo piano perpendicolarmente al
campo magnetico (vedi Figura 4.4) e con corrente circolante in maniera tale
che le forze agenti sui due lati lunghi della spira siano orientate verso
l’esterno della spira (posizione di equilibrio stabile).
N
S
Pagina 36 di 81
Elementi di Modellistica dei Sistemi Dinamici
Se, raggiunta tale configurazione, il commutatore inverte la corrente nella
spira, le forze cambiano verso e la spira, superato per inerzia il punto morto
in cui le forze sono uguali ed opposte, continuerà a ruotare.
In un generico istante t la coppia motrice che fa ruotare la spira è
proporzionale, istante per istante, alla corrente che circola e varia al variare
della posizione angolare della spira (vedi Figura).
N
S
Allo stesso modo la f.c.e.m. che si manifesta ai capi della spira varia al variare
della velocità di rotazione della spira stessa.
Pagina 37 di 81
Elementi di Modellistica dei Sistemi Dinamici
Per eliminare gli inconvenienti derivanti dalla variazione di coppia e quindi di
velocità angolare, si ricorre ad un sistema costituito da un unico avvolgimento
formante più spire angolarmente distribuite intorno ad un cilindretto, così da
avere una situazione del tipo mostrata in Figura.
N
S
Inoltre in un motore reale saranno presenti anche più scarpe polari, ed il
campo magnetico sarà generato non da un magnete permanente ma da un
ulteriore avvolgimento (detto di eccitazione).
Pagina 38 di 81
Elementi di Modellistica dei Sistemi Dinamici
Per tale sistema si ha:
Cm k c i
e k v
dove:
Cm = coppia motrice agente sul cilindretto
kc, kv = costanti di proporzionalità
i = correnti nelle spire
e = forza controelettromotrice
= velocità angolare del cilindretto
Pagina 39 di 81
Elementi di Modellistica dei Sistemi Dinamici
In tale sistema il magnete permanente (o l’avvolgimento di eccitazione) e il
supporto esterno a cui il magnete è fissato prendono il nome di statore o
equipaggio fisso;
il tamburo (cilindretto) centrale e le spire su di esso avvolte prendono il nome
di rotore o equipaggio mobile. A tale rotore è collegato un alberino che ruota
con esso e che è detto albero motore.
I contatti striscianti si chiamano spazzole.
Il circuito elettrico costituito dalle spire, dai contatti striscianti e dai conduttori
di collegamento esterni è detto circuito di armatura.
Pagina 40 di 81
Elementi di Modellistica dei Sistemi Dinamici
Nel funzionamento usuale il motore in corrente continua è comandato da un
generatore di tensione che alimenta il circuito d’armatura: variando la
tensione di comando viene fatta variare la velocità di rotazione.
Le equazioni di funzionamento del motore sono costituite da un’equazione di
equilibrio elettrico e una di equilibrio meccanico.
Nell’equazione di equilibrio elettrico bisogna portare in conto la resistenza e
l’induttanza di armatura;
nell’equazione di equilibrio meccanico bisogna portare in conto l’inerzia e il
coefficiente di attrito dell’equipaggio mobile (rotore + albero motore +
supporti esterni) del motore, oltre alle caratteristiche del carico meccanico.
Questo, nel seguito, è schematizzato semplicemente come una coppia
resistente, ma, in generale, potrebbe comprendere anche un momento di
inerzia e una coppia di attrito viscoso.
Pagina 41 di 81
Elementi di Modellistica dei Sistemi Dinamici
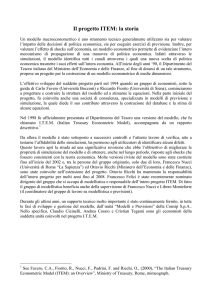
La schematizzazione grafica di un motore elettrico in c.c. è mostrata in Figura.
ia(t)
Ra
La
Jm. Bm
e(t)
va(t)
Cr
Fig. 4.7
In essa:
Ra = resistenza d’armatura
e = forza controelettromotrice
La = induttanza d’armatura
Jm , Bm = momento d’inerzia e coefficiente
d’attrito del motore
va = tensione d’armatura
ia = corrente d’armatura
= velocità angolare dell’albero motore
Cr = coppia resistente del carico
Pagina 42 di 81
Elementi di Modellistica dei Sistemi Dinamici
Si ha allora:
dia
va Ra ia La
e
dt
d
Cm J m
Bm C r
dt
da cui:
dia
va Ra ia La
k v
dt
d
k c ia J m
Bm C r
dt
Pagina 43 di 81
Elementi di Modellistica dei Sistemi Dinamici
Per ottenere una rappresentazione i-s-u, supponendo di essere interessati allo
studio della velocità angolare, basta porre:
u1 v a
u2 Cr
x1 ia
x2
y
ottenendo:
u1 Ra x1 La x1 k v x2
k c x1 J m x 2 Bm x2 u 2
Pagina 44 di 81
Elementi di Modellistica dei Sistemi Dinamici
da cui:
x1
Ra
kv
1
x1
x2 u1
La
La
La
kc
Bm
1
x 2
x1
x2
u2
Jm
Jm
Jm
y x2
In forma matriciale:
Ra
La
x
kc
J
m
1
x La
0
y 0 1 x 0 0u
kv
La
Bm
Jm
0
u
1
J m
Pagina 45 di 81
Elementi di Modellistica dei Sistemi Dinamici
3. Sistemi idraulici
I fluidi sono particolari stati della materia caratterizzati dal fatto di non avere
resistenza a sollecitazioni di taglio. Essi si possono presentare in due forme:
liquido e gassoso.
Di conseguenza i sistemi a fluido si distinguono in sistemi idraulici e sistemi
pneumatici.
I sistemi idraulici e pneumatici sono di notevole interesse nei sistemi di
controllo, sia perché, in taluni casi, rappresentano proprio l’impianto da
controllare. Ad esempio
controllo di livello di serbatoi collegati mediante tubazioni
controllo della portata di un liquido idraulico attraverso un orifizio
controllo della portata in un gasdotto
Pagina 46 di 81
Elementi di Modellistica dei Sistemi Dinamici
Sia, più frequentemente, perché sono utilizzati come organi di attuazione. Ad
esempio
valvole di controllo
servosistemi idraulici o pneumatici
motori idraulici
O come organi di regolazione (regolatori standard di tipo idraulico o
pneumatico).
Pagina 47 di 81
Elementi di Modellistica dei Sistemi Dinamici
Unità di misura utilizzate nel Sistema Internazionale
Usata per i liquidi
Sistema
Internazionale
(SI)
Portata
volumetrica
m3/s
Portata di massa
kg/s
Pressione
2
N/m = Pa
(Pascal)
Altre unità di
misura
Usata per i
gas
1kgf/cm2= atm
(atmosfera)
10N/cm2=105Pa
Pagina 48 di 81
Elementi di Modellistica dei Sistemi Dinamici
3.1.
Concetti elementari di fluidodinamica
Proprietà caratteristiche dei fluidi
Coefficiente di compressibilità. E' definito come l'opposto della variazione
relativa di volume che subisce un volumetto di fluido in conseguenza di una
variazione unitaria di pressione. Con riferimento ad un volume V di fluido, tale
parametro, generalmente indicato con , è dato pertanto da:
V V
p
Il coefficiente di compressibilità di un fluido è sempre positivo.
Nel caso di liquidi il suo valore è molto piccolo e, inoltre, esibisce piccole
variazioni con la temperatura.
Ad esempio, per l'acqua a 0°C, vale 4.62E-5 atm-1, mentre a 60°C vale 3.95E5 atm-1. Nel caso di gas il suo valore dipende fortemente dalla temperatura.
Pagina 49 di 81
Elementi di Modellistica dei Sistemi Dinamici
Coefficiente di dilatazione termica. E' definito come la variazione relativa
di volume che subisce un volumetto di fluido in conseguenza di una variazione
unitaria di temperatura esterna.
Esso, generalmente indicato con , è dato pertanto da:
V V
T
Tale grandezza, nel caso dell'acqua a 0°C, vale 5.32E-5(°C)-1.
Nel caso di gas il valore di tale coefficiente dipende fortemente dalla
pressione.
Pagina 50 di 81
Elementi di Modellistica dei Sistemi Dinamici
Viscosità. Per definire la viscosità di un fluido facciamo riferimento ad un
liquido che avanza, a bassa velocità, in un canale a pelo libero e avente
un'altezza molto minore della larghezza.
A differenza di quanto avviene nei solidi, il moto di un liquido avviene per
scorrimento di strati uno sull'altro: lo strato di liquido a contatto con il fondo è
fermo, mentre gli strati superiori hanno una velocità sempre maggiore via via
che ci si sposta dal fondo verso il pelo libero.
Nello scorrere l'uno sull'altro, gli strati liquidi meno veloci della corrente
oppongono, per attrito, una resistenza al trascinamento sugli strati più veloci
che scorrono su di essi. Per i fluidi Newtoniani si ha
dv(h)
Fa (h0 ) S
dh
h h0
dove v(h) indica la velocità del fluido alla quota h dal fondo. I fluidi che
ubbidiscono a questa legge sono detti fluidi Newtoniani.
L'esperienza mostra che la viscosità di un fluido diminuisce sensibilmente al
crescere della temperatura, mentre aumenta al crescere della pressione.
Pagina 51 di 81
Elementi di Modellistica dei Sistemi Dinamici
Calore specifico. E' definito come la quantità di calore che bisogna fornire ad
un volumetto di fluido di massa unitaria per incrementare di una unità la sua
temperatura. Nel caso dell'acqua a 15°C, esso è, per definizione di caloria,
pari a 1(cal/g°C). Nel caso di gas dipende dal tipo di trasformazione ipotizzata
(a volume costante, a pressione costante, etc).
Conducibilità termica. E' definito come il flusso di calore o potenza termica
(quantità di calore nell'unità di tempo) che si trasmette per conduzione
attraverso uno strato di fluido di sezione unitaria e spessore unitario in
presenza di un gradiente unitario di temperatura.
Nel caso del ghiaccio vale 4E-3 (cal/s cm °C). L'acqua a 25°C è un po' meno
conduttrice.
Fluido ideale. Per definizione, un fluido è detto ideale se è incompressibile e
privo di viscosità.
Pagina 52 di 81
Elementi di Modellistica dei Sistemi Dinamici
Principali leggi per lo studio del moto di un fluido
La descrizione del moto di un fluido può essere effettuata in due modi:
approccio Lagrangiano, consistente nel determinare il moto dei vari
volumetti di fluido come se fossero dei punti materiali, soggetti sia a forze
esterne (es. forza peso) sia a forze interne di pressione dovute al contatto
con gli altri volumetti di fluido, e determinandone traiettoria e legge oraria
con le equazioni della dinamica;
approcio Euleriano, consistente nel determinare, in ogni punto P dello
spazio occupato dal fluido in movimento, e in ogni istante t le grandezze
caratteristiche del fluido, ossia la pressione p(P,t), la densità di massa
(P,t), e il vettore velocità v(P,t). L’insieme dei valori assunti, in un
istante t, dalla pressione, densità e velocità del fluido nei vari punti
prendono i nomi di campo di pressione, campo di densità e campo di
velocità del fluido all’istante t.
Pagina 53 di 81
Elementi di Modellistica dei Sistemi Dinamici
Con riferimento ad un fluido in regime stazionario, si definisce linea di flusso
una linea che, in ogni suo punto, ha per tangente il vettore velocità del fluido.
Poiché in un fluido in regime stazionario il campo di velocità è costante, le
linee di flusso non cambiano al variare del tempo; ciascuna di essa individua
la traiettoria seguita da un generico volumetto di fluido passante per uno dei
punti della linea di flusso.
E’ ovvio che, in regime stazionario, per un punto passa una e una sola linea di
flusso. Pertanto le linee di flusso non si intersecano.
Se consideriamo una curva chiusa C nel fluido, la totalità delle linee di flusso
passanti per i suoi punti formano una specie di tubo detto tubo di flusso.
Pagina 54 di 81
Elementi di Modellistica dei Sistemi Dinamici
C
Le principali leggi per lo studio del moto di un fluido sono:
i)
l’equazione di continuità (o legge di conservazione della massa);
ii)
l’equazione di Bernoulli.
Pagina 55 di 81
Elementi di Modellistica dei Sistemi Dinamici
Equazione di continuità.
2, p2, v2
1, p1, v1
P2
S2
P1
S1
Con riferimento al tubo di flusso in figura si ha:
q m1 q m 2
e quindi:
1S1v1 2 S2v2
Pagina 56 di 81
Elementi di Modellistica dei Sistemi Dinamici
Per i fluidi incompressibili inoltre la densità si può ritenere costante nelle varie
sezioni, per cui si può scrivere come:
S1v1 S 2 v2
qV 1 qV 2
dove qV 1 , qV 2 sono le portate volumetriche in ingresso e uscita.
Pagina 57 di 81
Elementi di Modellistica dei Sistemi Dinamici
Legge di Bernoulli. Consideriamo un volumetto dV di un fluido omogeneo,
ideale (incompressibile e privo di viscosità), in regime stazionario, in
movimento lungo una linea di flusso. In un generico istante t la sua energia è
somma di tre termini:
1
2
energia cinetica = 2 dV v ,
energia potenziale gravitazionale = dV g z ,
energia di pressione p dV (su un volumetto elementare agisce una forza di
pressione data da pdV ).
Il teorema di Bernoulli stabilisce che, in un qualsiasi punto lungo la linea di
flusso l’energia totale del volumetto di fluido è costante, ossia, facendo
riferimento ad un volumetto dV unitario:
1 2
v g z p cost
2
Tale equazione è detta equazione di Bernoulli.
Pagina 58 di 81
Elementi di Modellistica dei Sistemi Dinamici
Il teorema di Bernoulli si può scrivere anche nella seguente forma:
p
v2
z
cost
g 2g
I tre termini di tale somma sono suscettibili della seguente interpretazione:
il termine z rappresenta la quota a cui si trova il volumetto di fluido, ed è
detto altezza geometrica;
p
il termine g è detto altezza piezometrica;
v2
il termine 2 g rappresenta l’altezza a cui giungerebbe un grave lanciato verso
l’alto con velocità v, ed è detto altezza di arresto.
La somma delle tre altezze è detta altezza totale o carico effettivo. Il teorema
di Bernoulli, pertanto, stabilisce che: “lungo una linea di flusso di un fluido
ideale (incompressibile e privo di viscosità) in regime stazionario, la somma
dell’altezza geometrica, di quella piezometrica e di quella di arresto è
costante”.
Pagina 59 di 81
Elementi di Modellistica dei Sistemi Dinamici
Applicazioni del teorema di Bernoulli
Cominciamo con l’osservare che poichè il teorema di Bernoulli si riferisce ad
un fluido ideale, esso è applicabile prevalentemente ai liquidi a bassa
viscosità.
Variazione di pressione in una strozzatura. Consideriamo una condotta
orizzontale contenente una strozzatura (vedi Figura 5.3) e in cui fluisce un
liquido perfetto con portata qV . Si vuole determinare il salto di pressione nella
strozzatura.
S1
v1 , p1
S2
v2 , p2
Pagina 60 di 81
Elementi di Modellistica dei Sistemi Dinamici
Per il teorema di Bernoulli e tenendo conto dell’equazione di continuità risulta:
p1
2
v1 p2
2
2
v2
2
p1
qv
2
2 S1
2
p2
qv
2
2 S22
da cui:
p1 p 2
Nel caso in cui
1
2 S 2 2
1 2
2 qV
S1
S 2 S1 , risulta:
p1 p2
2S 2
q
2 V
2
Pertanto il salto di pressione dipende dal quadrato della portata volumetrica.
Pagina 61 di 81
Elementi di Modellistica dei Sistemi Dinamici
E’ importante notare che, a valle della strozzatura, se la sezione della
condotta ritorna al valore che aveva a monte della strozzatura, anche la
pressione ritorna allo stesso valore. Ciò è in accordo col fatto che, non
essendovi perdite di energia, allorchè a valle della strozzatura la velocità del
fluido, e quindi l’energia cinetica, torna al valore che aveva a monte, anche
l’energia di pressione torna allo stesso valore. Ciò, ovviamente, non è più vero
nel caso di fluidi reali nei quali vi sono perdite per attrito interno dovuto alla
viscosità.
Portata attraverso un orifizio posto sul fondo di un serbatoio
(teorema di Torricelli). Consideriamo un serbatoio sul cui fondo è presente
un orifizio di sezione S, e in cui è presente un liquido ideale (vedi Figura 5.4).
Detta h l’altezza del liquido nel serbatoio in un certo istante t, si vuole
determinare la portata qV del liquido attraverso l’orifizio.
Pagina 62 di 81
Elementi di Modellistica dei Sistemi Dinamici
p0
h
p0 , v
Supponendo trascurabile la velocità di spostamento del liquido sul pelo libero,
per il teorema di Bernoulli risulta:
p0 gh p0
2
v2
2
v 2 gh
qV S 2 g
h
Pertanto la portata attraverso l’orifizio dipende dalla radice quadrata
dell’altezza del liquido nel serbatoio. Essa non dipende né da né da p0.
Pagina 63 di 81
Elementi di Modellistica dei Sistemi Dinamici
Pressione in un fluido in quiete: legge di Stevino. Consideriamo un fluido
ideale in condizioni di quiete, come ad esempio un liquido in un serbatoio. Il
teorema di Bernoulli si scrive:
g z p cost
Se pertanto consideriamo un recipiente contenente un fluido ideale in
condizioni di riposo, detta p 0 la pressione atmosferica in superficie e p z la
pressione ad una generica quota -z, risulta:
p0 g z p z
p z p0 g z
L’ultima equazione è nota come “legge di Stevino”. Da un punto di vista
interpretativo, è interessante notare che il termine di pressione gz
rappresenta il peso di una colonna di fluido di altezza z e superficie unitaria.
E’ importante osservare che, essendo il fluido in quiete, l’ipotesi di
incompressibilità e di assenza di viscosità non gioca alcun ruolo, per cui la
(5.8) può ritenersi valida anche per fluidi (sia liquidi che gassosi) reali.
Pagina 64 di 81
Elementi di Modellistica dei Sistemi Dinamici
Osservazione. Per le considerazioni che faremo in seguito nello studio dei
sistemi idraulici è importante osservare che la portata attraverso un orifizio
sul fondo di un serbatoio può anche essere ottenuta utilizzando la legge di
Stevino mediante il seguente ragionamento.
Nell’ipotesi che la sezione dell’orifizio sia piccola, si può assumere che la
perturbazione allo stato di quiete del liquido nel serbatoio dovuta alla portata
attraverso l’orifizio sia trascurabile.
Pertanto la pressione sul fondo, e quidi immediatamente a monte dell’orifizio,
la si può ottenere dalla legge di Stevino
p1 p0 g h .
Utilizzando poi la relazione tra portata e differenza di pressione in un orifizio,
e tenendo presente che la pressione all’uscita dell’orifizio è p 0 , si ottiene:
qV S
2 p1 p 0
S
2 gh
S 2g
h
Questo modo di procedere lo adotteremo nella scrittura del modello dei
sistemi di serbatoi.
Pagina 65 di 81
Elementi di Modellistica dei Sistemi Dinamici
3.2.
Sistemi liquido-livello con liquido ideale
I sistemi liquido-livello sono sistemi costituiti da serbatoi collegati attraverso
tratti di condotte; in tali tratti di collegamento possono anche essere presenti
delle strozzature o delle valvole.
In questo paragrafo prenderemo in considerazione sistemi liquido-livello nei
quali circola liquido ideale, ossia incompressibile e privo di viscosità.
Mentre la prima ipotesi è verificata con buona approssimazione nel caso di
liquidi, la seconda, invece, non è quasi mai verificata.
Tuttavia lo studio di tali sistemi ha interesse per prendere confidenza con il
problema di scrittura del modello, facendo riferimento alle leggi fisiche per
essi discusse nel paragrafo precedente.
A tal proposito precisiamo che, nei sistemi che prenderemo in considerazione,
assumeremo che le masse di fluido che si muovono nei tratti di condotta siano
trascurabili rispetto a quelle presenti nei serbatoi, e le loro velocità, anche se
variabili, si mantengano comunque basse.
Pagina 66 di 81
Elementi di Modellistica dei Sistemi Dinamici
Questo ci consente di assumere che il fluido nei serbatoi sia praticamente in
quiete, mentre, ovviamente, nei tratti di condotta il regime di moto non è
stazionario, bensì le masse di fluido sono soggette ad accelerazioni.
Per lo studio dei sistemi liquido-livello ci si può avvalere di alcune analogie
con i sistemi elettrici. In tali analogie si fa corrispondere la portata
volumetrica alla corrente, e la pressione al potenziale elettrico; di
conseguenza la differenza di pressione tra due sezioni di un sistema idraulico
corrisponde alla tensione tra due punti di un sistema elettrico.
Per quanto detto, i componenti elementari da prendere in considerazione in
tale studio sono di tre tipi:
tratto di condotta
strozzatura (o valvola)
serbatoio
Pagina 67 di 81
Elementi di Modellistica dei Sistemi Dinamici
Per quanto riguarda le alimentazioni esterne, queste sono in genere di due
tipi:
alimentatori ideali di pressione, in grado di imporre il valore di pressione
in una sezione del sistema;
alimentatori ideale di portata, in grado di imporre la portata in un tratto di
condotta.
Pagina 68 di 81
Elementi di Modellistica dei Sistemi Dinamici
Componenti elementari di sistemi idraulici con liquido ideale
Serbatoio. Consideriamo un serbatoio del tipo mostrato in Figura
qi
p0
h
pu
Pagina 69 di 81
Elementi di Modellistica dei Sistemi Dinamici
Detti:
V il volume di liquido in esso contenuto,
S la sezione trasversale del serbatoio,
h l’altezza del liquido,
qi la portata entrante,
p0 la pressione atmosferica in superficie,
pu la pressione sul fondo
le leggi fisiche che ne descrivono il comportamento sono:
Legge di conservazione della massa:
dV
qi
dt
dh
S
qi
dt
Legge di Stevino:
pu p0 gh
Pagina 70 di 81
Elementi di Modellistica dei Sistemi Dinamici
Analogo elettrico del serbatoio. Indicando con pu 0 la differenza di pressione tra
fondo e pelo libero, si ottiene:
S dpu 0
qi
g dt
Confrontando questa con la relazione costitutiva di un condensatore, si
conclude che un serbatoio può essere visto come un condensatore idraulico di
capacità:
S
C
g
pu
qi
pu0
In Figura è schematizzata tale analogia elettrica.
C
p0
Pagina 71 di 81
Elementi di Modellistica dei Sistemi Dinamici
Si consideri ora il caso in cui è presente anche un orifizio di uscita, come
mostrato in Figura
p0
h
qi
qu
pu
La legge di conservazione della massa si scrive:
dV
qi qu
dt
S
dh
qi qu
dt
per cui, con operazioni analoghe alle precedenti si ha:
S dpu 0
qi qu
g dt
Pagina 72 di 81
Elementi di Modellistica dei Sistemi Dinamici
In questo caso il circuito elettrico analogo è mostrato in Figura
pu
qu
qi-qu
qi
C
pu0
p0
Per ottenere una rappresentazione i-s-u di un serbatoio, pertanto, conviene
assumere come variabile di stato la differenza di pressione tra fondo e pelo
libero del serbatoio. Tale variabile è legata all’altezza h del liquido nel
serbatoio (solitamente usata come variabile di stato) dalla legge di Stevino.
Pagina 73 di 81
Elementi di Modellistica dei Sistemi Dinamici
Tratto di condotta. Come detto nella parte introduttiva del paragrafo, qui
assumiamo che nei tratti di condotta il regime di moto non è stazionario,
bensì le masse di fluido sono soggette ad accelerazioni. Di conseguenza, nel
caso di liquido ideale (assenza di attrito interno), l’unica legge necessaria per
descrivere il comportamento pressione-portata in un tratto di condotta è la
legge di Newton che fornisce il legame tra la forza derivante dalla differenza di
pressione agli estremi e l’accelerazione della massa di fluido nella condotta.
Consideriamo il tratto di condotta mostrato in Figura.
qV
qV
S
p1
p2
La massa di fluido da accelerare è S , mentre la forza agente su essa vale
S p1 p2 . Detta v la velocità del fluido, la legge di Newton si scrive:
S
dv
S p1 p2
dt
Pagina 74 di 81
Elementi di Modellistica dei Sistemi Dinamici
Poiché qv Sv , indicando con p12 p1 p2 , si ha:
dqV
p12
S dt
Confrontando questa con la relazione costitutiva di un induttore elettrico, si
conclude che un tratto di condotta in cui scorre un liquido ideale può essere
visto come un induttore idraulico di induttanza:
L
S
In Figura è schematizzata tale analogia elettrica.
p1
qV
L
p12
p2
Pagina 75 di 81
Elementi di Modellistica dei Sistemi Dinamici
Per ottenere una rappresentazione i-s-u di un tratto di condotta, pertanto,
conviene assumere come variabile di stato la portata volumetrica di liquido
che fluisce in essa.
Consideriamo ora il caso in cui il tratto di condotta non è in posizione
orizzontale.
z2
p2
z1
p1
qV
Pagina 76 di 81
Elementi di Modellistica dei Sistemi Dinamici
Mediante una diretta estensione del teorema di Bernoulli, ai termini di
pressione piezometrica p1 e p 2 vanno aggiunti i termini di pressione
geometrica, per cui la relazione costitutiva completa diventa:
p1 p2 dqV
S dt
g z 2 z1
In questo caso il circuito elettrico analogo è mostrato in Figura.
p1
gz2 z1
+
_
p 12
qV
L
p2
Pagina 77 di 81
Elementi di Modellistica dei Sistemi Dinamici
Modelli i-s-u di sistemi liquido-livello con liquido ideale
Per la scrittura di un modello i-s-u di un sistema liquido-livello si procede in
maniera del tutto analoga a quella seguita per i sistemi elettrici.
La prima operazione consiste, come al solito, nella scelta delle variabili di
stato. Queste, sulla base di quanto precedentemente detto, nella quasi totalità
dei casi possono essere assunte coincidenti con le differenze di pressione tra
fondo e pelo libero dei serbatoi, e con le portate nei tratti di condotta, fatta
eccezione per quei componenti (serbatoi o condotte) in cui tali grandezze
siano imposte da qualche generatore di pressione o di portata. A differenza di
quanto visto nel caso elettrico, tuttavia, per i sistemi in considerazione non è
infrequente il caso in cui l’induttanza idraulica di un tratto di condotta è
trascurabile, e questo o perchè la condotta è di piccola lunghezza oppure di
grossa sezione. Sia n il numero di tali variabili di stato.
Successivamente si passa alla scrittura delle relazioni fisiche tra tali
grandezze. Queste sono fornite da leggi analoghe ai principi di Kirchhoff per i
sistemi elettrici. Per la scrittura di tali leggi, spesso è necessario introdurre,
oltre alle variabili di stato, altre variabili di comodo, come ad esempio
differenze di pressioni ai capi di tratti di condotte. Poiché ogni aggiunta di una
variabile implica la scrittura di un’equazione in più, conviene cercare di ridurre
Pagina 78 di 81
Elementi di Modellistica dei Sistemi Dinamici
il numero di tali variabili aggiuntive cercando di esprimerle direttamente in
termini delle variabili di stato sfruttando sia le relazioni costitutive relative ai
vari componenti sia le ben note proprietà relative ai collegamenti di serbatoi e
tratti di condotte, come ad esempio “la portata in uscita di un serbatoio è
uguale a quella che circola nell’unica condotta di uscita”, oppure “la differenza
tra le pressione agli estremi di un tratto di condotta che collega due serbatoi è
ricavabile dalle differenze di pressione associate ai serbatoi”. Se indichiamo
con z il numero di variabili aggiuntive, dovremo scrivere n+z equazioni
indipendenti.
Spesso, per semplificare la scrittura del modello, conviene ricavare il circuito
elettrico analogo del sistema liquido-livello in studio, e successivamente
applicare a tale analogo elettrico i principi di Kirchhoff.
L’esempio che segue è utile per chiarire i concetti suesposti.
Pagina 79 di 81
Elementi di Modellistica dei Sistemi Dinamici
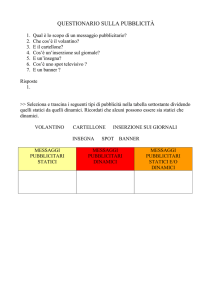
Esempio 5.1 Nell’ipotesi di liquido ideale, scrivere un modello i-s-u del
sistema liquido-livello mostrato in Figura 5.12a che consenta di studiare
l’andamento dell’altezza di liquido nel serbatoio 2.
p0
S1
S2
h1
p1
p0
h2
qV
qV
p2
S
p0
p1
C1
x3
x1
L
C2
x2
p2
Pagina 80 di 81