Introduzione alla teoria degli spazi di Hilbert
per il Corso di Metodi Matematici per
l’Ingegneria
Marco Bramanti
Politecnico di Milano
4 maggio 2012
Indice
1 Cenni su operatori e funzionali lineari continui
1.1 Operatori lineari continui . . . . . . . . . . . . . . . . . . . . . .
1.2 Funzionali lineari continui . . . . . . . . . . . . . . . . . . . . . .
1
1
4
2 Geometria negli spazi di Hilbert
2.1 Spazi vettoriali con prodotto interno . . . . . . . . . . . . . . . .
2.2 Spazi di Hilbert . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6
7
13
3 Funzionali lineari continui su uno spazio di Hilbert
17
4 Analisi di Fourier in spazi di Hilbert
22
5 Applicazioni all’analisi armonica
29
5.1 Il sistema trigonometrico. Serie di Fourier in una o due variabili
29
5.2 Base di Haar e wavelets . . . . . . . . . . . . . . . . . . . . . . . 34
1
Cenni su operatori e funzionali lineari continui
Prima di introdurre l’argomento degli spazi di Hilbert, dobbiamo rapidamente
introdurre alcuni concetti riguardanti le funzioni lineari de…nite su spazi vettoriali normati qualsiasi.
1.1
Operatori lineari continui
De…nizione 1.1 Siano X; Y due spazi vettoriali normati sul campo K (= R o C).
Una funzione T : X ! Y si dice operatore lineare se
T ( x + y) = T (x) + T (y) 8x; y 2 X; 8 ;
1
2 K.
Solitamente quando un operatore è lineare si omette la parentesi nell’argomento, e si scrive T x invece che T (x) (ma naturalmente bisogna comunque
scrivere T (x + y) se l’argomento è una somma!).
Teorema 1.2 Siano X; Y due spazi vettoriali normati e T : X ! Y un operatore lineare. Sono equivalenti le seguenti tre condizioni:
(a) T (vista come funzione tra due spazi metrici) è continua in 0.
(b) T è continua in ogni punto.
(c) vale la seguente condizione di limitatezza:
kT xkY
< 1:
x2X;x6=0 kxkX
sup
Dimostrazione. Proviamo che (a)=)(b). Questo è vero per linearità. Proviamo che T è continua in x sapendo che è continua in 0: Occorre mostrare
che
xn ! x =) T xn ! T x:
Ma per linearità:
T xn
T x = T (xn
x) ! 0 perché (xn
x) ! 0 e T è continua in 0.
Proviamo che (b)=)(c). Per assurdo, sia
kT xkY
= +1;
x2X;x6=0 kxkX
sup
1
allora esiste una successione fxn gn=1
X tale che
kT xn kY
kxn kX
Poniamo yn =
si ha
xn
nkxn kX .
Allora kyn kX =
n:
1
n
(1.1)
! 0 perciò essendo T continua in 0
T yn ! 0. Ma:
T yn =
kT xn kY
T xn
perciò kT yn kY =
n kxn kX
n kxn kX
1 per (1.1),
assurdo.
Proviamo che (c)=)(a). Per ipotesi esiste K > 0 tale che
kT xkY
< K per ogni x 2 X; x 6= 0:
kxkX
Allora se xn ! 0;
kT xn kY < K kxn kX ! 0
perciò T xn ! 0; e T è continua in 0. L’equivalenza delle tre condizioni è quindi
provata.
2
De…nizione 1.3 Un operatore lineare T : X ! Y tra due spazi vettoriali normati X; Y si dice continuo se vale una delle tre condizioni equivalenti espresse
dal teorema precedente. In tal caso si de…nisce norma dell’operatore il numero
kT k =
kT xkY
.
x2X;x6=0 kxkX
sup
Risulta, per de…nizione
kT xkY
kT k kxkX
8x 2 X:
Esempio 1.4 1. Sia k 2 L1 (Rn ). Allora
T : Lp (Rn ) ! Lp (Rn )
T f = kf
è lineare continuo su Lp (Rn ) ; per ogni p 2 [1; 1] ; con kT k = kkkL1 (Rn ) . T si
dice (ovviamente) operatore di moltiplicazione.
2. Sia k 2 L1 (Rn ) : Allora
T : Lp (Rn ) ! Lp (Rn )
Tf = k f
è lineare continuo su Lp (Rn ) ; per ogni p 2 [1; 1] ; con kT k = kkkL1 (Rn ) , in base
alla disuguaglianza di Young. T si dice (ovviamente) operatore di convoluzione.
2. Sia
T : C 0 [0; 1] ! C 0 [0; 1]
Z x
T f (x) =
f (t) dt:
0
L’operatore integrale T è lineare continuo,
Z x
Z
jT f (x)j
jf (t)j dt kf k1
0
kT f k1
0
x
dt = x kf k1
kf k1 :
3. Sia
T : C 2 [a; b] ! C 0 [a; b]
T f (x) = (x) f 00 (x) + (x) f 0 (x) + (x) f (x)
con
; ;
2 C 0 [a; b] : L’operatore di¤ erenziale T è lineare e continuo perché
kT f kC 2 [a;b]
c kf kC 0 [a;b]
con c dipendente da k kC 0 [a;b] ; k kC 0 [a;b] ; k kC 0 [a;b] :
3
Si veri…ca facilmente che ogni combinazione lineare di operatori lineari continui tra X e Y è a sua volta un operatore lineare continuo. Si può considerare
quindi lo spazio L (X; Y ) di tutti gli operatori lineari continui tra gli spazi
vettoriali normati X e Y , che risulta uno spazio vettoriale. Anzi, la norma
operatoriale
kT xkY
kT k = sup
x2X;x6=0 kxkX
risulta e¤ettivamente una norma in questo spazio, quindi: L (X; Y ) è uno spazio
vettoriale normato. Si può dimostrare che, inoltre, se Y è di Banach anche
L (X; Y ) è di Banach.
1.2
Funzionali lineari continui
Un caso particolare di operatore lineare si ha quando Y coincide con il campo
degli scalari. Un operatore lineare continuo T : X ! R (dove X è uno spazio
vettoriale normato reale) si dice funzionale lineare continuo su X. Lo spazio
L (X; R) si dice spazio duale di X e si indica con X o X 0 : E’ sempre uno
spazio di Banach (perché il secondo spazio, Y = R, lo è). Quindi il duale di
uno spazio vettoriale normato X è lo spazio (vettoriale normato) dei funzionali
lineari continui su X. La norma di un funzionale lineare continuo è de…nita da
kT k =
sup
x2X;x6=0
jT xj
.
kxkX
Esempio 1.5 1. Sia X = C 0 [a; b]. Fissato un punto x0 2 [a; b], il funzionale
T f = f (x0 )
è ovviamente lineare, ed è continuo perché
jT f j = jf (x0 )j
kT k
kf kC 0 [a;b] , da cui
1:
T si dice funzionale di valutazione (valuta le funzioni nel punto x0 ).
2. Sia X = C 0 [a; b]. L’integrale de…nito è un funzionale lineare continuo:
Z b
Tf =
f (t) dt
a
jT f j
kT k
Z
a
(b
b
jf (t)j dt
kf kC 0 [a;b] (b
a)
a) :
Confrontando gli esempi 1 e 2 vediamo che esistono funzionali lineari continui di tipo molto diverso, sullo spazio C 0 [a; b] :
3. Sia X = Lp ( ), e …ssiamo una funzione g 2 Lq ( ) con q esponente
coniugato a p. Allora:
Z
Tf =
f (x) g (x) dx
4
è un funzionale lineare continuo su Lp ( ) ; per la disuguaglianza di Hölder:
Z
jT f j
jf (x) g (x)j dx kf kLp ( ) kgkLq ( ) ; perciò
kT k
kgkLq (
)
.
Mostriamo che è, più precisamente, kT k = kgkLq ( ) . E’ su¢ ciente per questo
trovare una speci…ca f per cui risulti
Si ha f 2 Lp perché
p
(q 1)p
jT f j
kf kp
q 1
= kgkq : Poniamo: f = jgj
q
q=p
jf j = jgj
= jgj ; quindi kf kp = kgkq
Z b
Z b
q
q
Tf =
f (t) g (t) dt =
jgj dt = kgkq
a
sgn(g) :
e
a
q
kgkq
Tf
q
=
= kgkq
q=p
kf kp
kgkq
q=p
= kgkq ;
quindi kT k = kgkLq ( ) .
L’ultimo esempio si può rileggere così: ogni funzione g 2 Lq ( ) induce
in modo naturale un funzionale lineare continuo su Lp ( ) per p; q coniugati.
Potremmo indicare questo funzionale con
Tg : Lp ( ) ! R
Z b
Tg : f 7 !
f g:
a
Chiediamoci ora: esistono funzionali lineari continui su Lp ( ) di tipo diverso
da questo, cioè che non si rappresentino come integrali contro una funzione Lq ?
La risposta è negativa, e questo signi…ca che conosciamo una caratterizzazione
completa dei funzionali lineari continui su Lp ( ):
Teorema 1.6 (di rappresentazione di Riesz) Sia 1
p < 1. Per ogni
funzionale lineare continuo T su Lp ( ) esiste una funzione g 2 Lq ( ) (con q
esponente coniugato di p) tale che
T :f 7 !
Z
b
f g:
a
Inoltre kT k = kgkq .
Possiamo anche leggere questo teorema dicendo: lo spazio duale di Lp ( )
si può identi…care con Lq ( ) ; per 1 p < 1. Invece, il duale di L1 ( ) non
è L1 ( ).
Si osservi che, in particolare, il duale di L2 ( ) è L2 ( ) stesso (essendo
l’esponente 2 il coniugato di se stesso). Questo fatto è un caso particolare di un
5
teorema molto più generale, di rappresentazione dei funzionali lineari continui
su uno spazio di Hilbert, di cui parleremo fra non molto.
Si osservi anche che tutto ciò che abbiamo detto vale per gli spazi Lp su
qualsiasi spazio di misura astratto ( ; M; ). Se in particolare consideriamo lo
spazio (N; P (N) ; m) dove m è la misura del conteggio, otteniamo gli spazi Lp
di successioni, indicati col simbolo `p :
8
9
!1=p
1
<
=
X
1
p
`p = x = fxn gn=1 R : kxk`p =
jxn j
< 1 ; per 1 p < 1;
:
;
n=1
`1 =
1
x = fxn gn=1
R : kxk`1 = sup jxn j < 1 :
n
In particolare i funzionali lineari continui su `p sono tutti e soli quelli del tipo:
1
Ty : fxn gn=1 7!
1
X
n=1
1
xn yn con fyn gn=1 2 `q …ssato,
e si ha:
1
X
n=1
xn yn
1
X
n=1
p
jxn j
!1=p
1
X
n=1
q
jyn j
!1=q
(disuguaglianza di Holder in spazi `p ). E’ interessante, in particolare, il caso
p = q = 2, per cui la disuguaglianza precedente risulta una generalizzazione
in…nito dimensionale della disuguaglianza (di Cauchy-Schwarz) elementare che
vale per il prodotto scalare in Rn :
!1=2 1
!1=2
1
1
X
X
X
2
2
xn yn
jxn j
jyn j
:
n=1
n=1
n=1
Questa relazione tra spazi in…nito dimensionali, prodotto scalare e funzionali
lineari continui avrà la sua piena chiari…cazione e il suo sviluppo naturale nella
teoria degli spazi di Hilbert, di cui ora ci occupiamo.
2
Geometria negli spazi di Hilbert
Gli spazi vettoriali dotati di un prodotto scalare sono ambienti astratti in cui si
può de…nire un concetto di ortogonalità analogo a quello euclideo in Rn . Questo
mette a disposizione un sistema di riferimento privilegiato in cui i calcoli sono
particolarmente comodi e semplici, un concetto di proiezione ortogonale che
diventa strumento per approssimare un elemento generico di uno spazio vettoriale (che nelle applicazioni all’analisi è una funzione) mediante elementi di
un particolare sottospazio (che nelle applicazioni sono funzioni di qualche tipo
particolarmente semplice). In dimensione in…nita, come abitualmente si è in
analisi, l’ortogonalità da sola non basterebbe però a garantire il “buon funzionamento” di questo tipo di teoria: la validità della proprietà di completezza (nel
6
senso degli spazi di Banach) è essenziale a¢ nché si possano dimostrare teoremi signi…cativamente simili a quelli che valgono in Rn . Da questa sintesi di
idee nasce il concetto di spazio di Hilbert, uno spazio di Banach in cui c’è un
prodotto scalare e quindi un concetto di ortogonalità. L’esempio più naturale
di spazio di Hilbert utile in analisi, in un certo senso prototipo di tutti gli altri,
è lo spazio L2 ( ) delle funzioni a quadrato sommabile in qualche dominio
di Rn . Perciò la teoria degli spazi di Hilbert, pur essendo di per sé una teoria
astratta che utilizza solo i concetti propri degli spazi vettoriali normati, nelle sue
applicazioni interessanti ha bisogno della teoria della misura e dell’integrazione
di Lebesgue. E’ una teoria che nasce quindi dall’incontro tra gli sviluppi dell’analisi funzionale astratta con la teoria della misura moderna. A sua volta,
l’applicazione della teoria astratta degli spazi di Hilbert al contesto concreto
dello spazio L2 ( ) richiede, come vedremo, la conoscenza di particolari “sistemi ortonormali completi”di funzioni. Il sistema trigonometrico fsin nx; cos nxg
comunemente usato nell’analisi di Fourier è il primo fondamentale esempio di
sistemi di questo tipo. A seconda del problema in esame (problemi di approssimazione di funzioni in analisi armonica, problemi ai limiti per equazioni differenziali ordinarie o alle derivate parziali), occorre a volte cercare altri tipi di
sistemi ortonormali completi di funzioni speciali, adattati in qualche senso al
problema in esame.
2.1
Spazi vettoriali con prodotto interno
De…nizione 2.1 Sia V uno spazio vettoriale sul campo K (= R o C). Si. dice
che V è uno spazio vettoriale dotato di prodotto interno, o di prodotto scalare, o
anche che V è uno spazio pre-Hilbertiano, se (oltre alle due operazioni proprie
dello spazio vettoriale, cioè la somma di vettori e il prodotto tra un vettore e
uno scalare) è de…nita una (terza) operazione, che chiamiamo prodotto scalare
o prodotto interno,
(; ):V V !K
con le seguenti proprietà:
1. lineare sulla prima componente:
( x + y; z) =
(x; z) + (y; z)
8x; y; z 2 V; ;
2 K;
2.a. se K = R (caso che maggiormente considereremo in seguito): commutativo
(x; y) = (y; x) 8x; y 2 V ;
2.b. se K = C:
(x; y) = (y; x)
8x; y 2 V
dove indica il coniugato nel campo complesso. Si noti che se K = R dalla
commutatività segue anche la linearità sulla seconda componente, per cui in tal
caso diciamo semplicemente che il prodotto scalare è bilineare; se invece K = C
da 1 e 2.b segue
(z; x + y) =
(z; x) + (z; y)
7
8x; y; z 2 V; ;
2C
e si dice che il prodotto scalare complesso è sesquilineare. Notiamo anche che
nel caso complesso essendo (x; x) = (x; x), risulta (x; x) reale per ogni x 2 V ,
il che dà senso alla prossima richiesta.
3. Positività:
(x; x)
0 8x 2 V e (x; x) = 0 () x = 0:
Esempio 2.2 1. Lo spazio Rn col prodotto scalare
n
X
(x; y) =
xj yj :
j=1
2. Lo spazio Cn (su C) col prodotto scalare
(x; y) =
n
X
xj yj :
j=1
3. Lo spazio Rn col prodotto scalare
n
X
(x; y) =
aij xj yj
i;j=1
n
dove A = (aij )i;j=1 è una qualsiasi matrice simmetrica e de…nita positiva.
4. Lo spazio C [a; b] (funzioni a valori reali) con
Z b
(f; g) =
f (t) g (t) dt:
a
5. Lo spazio C [a; b] (funzioni a valori complessi) con
Z b
(f; g) =
f (t) g (t)dt:
a
2
6. Lo spazio L ( ) (funzioni a valori reali o complessi),
misurabile di Rn con
Z
(f; g) =
f (x) g (x)dx:
sottoinsieme
Questo sarà l’esempio più importante nel seguito. Se le funzioni hanno valori
reali ovviamente non c’è bisogno di mettere il coniugato sopra g.
1
7. Lo spazio `2 delle successioni x = fxn gn=1 a valori reali o complessi per
le quali si abbia
1
X
2
jxj j < 1;
j=1
col prodotto scalare
(x; y) =
1
X
xj y j .
j=1
Questo è in un certo senso l’analogo discreto dell’esempio precedente. Si noti
l’analogia con il prodotto scalare usuale di Rn .
8
In tutto il seguito, per sempli…care le notazioni e le dimostrazioni, tratteremo
sempre spazi vettoriali su R. Quello che diremo vale comunque anche per spazi
complessi, con qualche modi…ca di notazione o nelle dimostrazioni.
Teorema 2.3 Sia V uno spazio pre-Hilbertiano. Allora:
1. Vale la disuguaglianza di Cauchy-Schwarz:
p
p
j(x; y)j
(x; x)
(y; y) 8x; y 2 V:
2. Ponendo
kxk =
p
(x; x)
si ottiene che k k è una norma, che si dice “norma del prodotto interno”. Si
noti che la disuguaglianza di Cauchy-Schwarz si riscrive quindi
j(x; y)j
kxk kyk 8x; y 2 V:
(2.1)
3. La norma del prodotto interno soddisfa l’uguaglianza del parallelogramma:
2
2
2
2
kx + yk + kx yk = 2 kxk + kyk
8x; y 2 V:
Dimostrazione. Dimostriamo il teorema lavorando per semplicità con uno
spazio pre-Hilbertiano reale. La dimostrazione di tutti i punti si basa sulle
proprietà assiomatiche del prodotto interno.
1. Per ogni 2 R possiamo scrivere: per la positività del prodotto scalare:
0
( x + y; x + y) =
per la bilinearità del prodotto scalare
2
=
(x; x) + 2 (x; y) + (y; y) =
per de…nizione di norma del prodotto scalare
=
2
2
2
kxk + 2 (x; y) + kyk :
Dunque abbiamo
2
2
kxk + 2 (x; y) + kyk
2
0 8 2 R,
il che implica che il discriminante del trinomio di secondo grado in
ossia
2
2
2
(x; y)
kxk kyk
0
sia
0,
da cui (2.1).
p
2. Ponendo kxk = (x; x) si ha, per la positività del prodotto scalare, la
proprietà di positività della norma. Vale l’omogeneità perché
p
p
p
2 (x; x) = j j
k xk = ( x; x) =
(x; x) = j j kxk :
9
Vale la disuguaglianza triangolare perché per de…nizione di norma e bilinearità
del prodotto scalare
2
2
2
kx + yk = (x + y; x + y) = (x; x) + 2 (x; y) + (y; y) = kxk + 2 (x; y) + kyk
per la (2.1)
2
2
2
kxk + 2 kxk kyk + kyk = (kxk + kyk)
da cui kx + yk kxk + kyk.
3. Per de…nizione di norma e bilinearità del prodotto scalare si ha:
2
kx + yk + kx
2
yk = (x + y; x + y) + (x y; x y)
= (x; x) + 2 (x; y) + (y; y) + (x; x)
2
2 (x; y) + 2 (y; y)
2
= 2 [(x; x) + (y; y)] = 2 kxk + kyk
:
Ogni spazio pre-Hilbertiano è dunque uno spazio vettoriale normato, la cui
norma “proviene da un prodotto scalare” e soddisfa l’uguaglianza del parallelogramma.
Viceversa, potremmo avere uno spazio vettoriale normato (qualsiasi) e chiederci se esista un prodotto scalare che induca quella norma. Da questo punto di
vista, il fatto che valga l’uguaglianza del parallelogramma risulta una condizione
necessaria, come mostra il prossimo
Esempio 2.4 Dimostriamo che la norma di L1 [a; b] non proviene da un prodotto scalare. Si faccia attenzione: è chiaro che il prodotto scalare
Z b
(f; g) =
f (t) g (t) dt
a
1
non induce la norma L (perché induce la norma L2 ); noi stiamo a¤ ermando
però che non esiste alcun prodotto scalare (f; g) per cui si abbia
!2
Z
b
(f; f ) =
a
jf (t)j dt
:
Se un tale prodotto scalare esistesse, la norma L1 dovrebbe soddisfare l’uguaglianza del parallelogramma, cosa che non accade, come ora mostriamo. Consideriamo, in L1 [0; 2]:
f (t) = [0;1] (t) ; g (t) = [1;2] (t) :
Poiché j(f
g) (t)j = 1 in [0; 2], si ha:
kf +
2
gkL1
+ kf
2
2
gkL1
2
=
Z
2
2
dt
+
0
Z
2
2
dt
= 4 + 4 = 8;
0
2 kf kL1 + kgkL1 = 2 (1 + 1) = 4
e l’uguaglianza non vale. Pertanto L1 non è uno spazio pre-Hilbertiano.
10
Si può dimostrare (non lo facciamo) che se V è uno spazio vettoriale normato
la cui norma soddisfa l’uguaglianza del parallelogramma, allora il prodotto
i
1h
2
2
2
kx + yk
kxk
kyk
(x; y) =
2
è e¤ettivamente un prodotto scalare, che induce la norma k k. Di conseguenza
l’uguaglianza del parallelogramma caratterizza le norme degli spazi pre-hilbertiani.
Questo fa capire che tutta la geometria dell’ortogonalità è scritta, implicitamente, nella semplice uguaglianza del parallelogramma. Difatti, come vedremo presto, quest’uguaglianza giocherà un ruolo centrale nella dimostrazione
di teoremi importanti.
Il prodotto scalare soddisfa una proprietà di continuità rispetto alla norma
che esso stesso induce:
Teorema 2.5 Sia V uno spazio vettoriale pre-hilbertiano. Per un x 2 H
…ssato, si consideri il funzionale:
T :H!R
T : y 7! (x; y) :
Allora T è un funzionale lineare continuo su X (rispetto alla norma indotta dal
prodotto scalare). Inoltre la norma di T come funzionale è uguale alla norma
dell’elemento x.
Dimostrazione. La linearità di T segue dalla bilinearità del prodotto scalare;
la continuità di T segue dalla disuguaglianza di Cauchy-Schwarz:
jT yj = j(x; y)j
kxk kyk
da cui T è continuo con
kT kV 0
kxk .
Di più, risulta kT kV 0 = kxk perché
jT xj = j(x; x)j = kxk
2
da cui jT xj = kxk = kxk e kT kV 0 kxk.
La continuità del prodotto scalare rispetto alla norma signi…ca in particolare
che
yn ! y =) (x; yn ) ! (x; y) .
Si può dimostrare anche:
xn ! x; yn ! y =) (xn ; yn ) ! (x; y) ,
relazione che ci sarà utile in seguito.
In uno spazio vettoriale con prodotto interno si può de…nire in maniera
naturale un concetto di ortogonalità:
11
De…nizione 2.6 Si dice che x; y 2 V sono ortogonali tra loro, e si scrive x ? y,
se (x; y) = 0:
Vale allora il seguente
Teorema 2.7 (di Pitagora) Siano x1 ; x2 ; :::; xn 2 V elementi a due a due
ortogonali. Allora
n
X
2
xj
j=1
=
n
X
j=1
2
kxj k :
Dimostrazione. Si ha, per de…nizione di norma e bilinearità del prodotto
scalare:
0
1
2
n
n
n
n
X
X
X
X
xj = @
xj ;
xi A =
(xi ; xj )
j=1
j=1
i;j=1
i=1
poiché i vettori sono a due a due ortogonali (xi ; xj ) = 0 per i 6= j, perciò
=
n
X
(xj ; xj ) =
j=1
n
X
j=1
2
kxj k :
De…nizione 2.8 Sia S
V un insieme qualsiasi di vettori. Si dice complemento ortogonale di S, e si indica con S ? , l’insieme
S ? = fx 2 V : (x; s) = 0 8s 2 Sg :
Teorema 2.9 L’insieme S ? è un sottospazio vettoriale chiuso di V (anche se
S non è un sottospazio).
Dimostrazione. Che sia un sottospazio segue dalla bilinearità del prodotto
scalare: se x; y 2 S ? e ; 2 R si ha, per ogni s 2 S;
( x + y; s) =
(x; s) + (y; s) =
0+
0 = 0:
1
Che sia chiuso segue dalla continuità del prodotto scalare. Infatti sia fxn gn=1
S ? tale che xn ! x 2 V; e proviamo che x 2 S ? . Infatti per ogni s 2 S si ha
(x; s) = lim (xn ; s) = lim 0 = 0;
n!1
n!1
quindi x 2 S ? e S ? è chiuso.
12
2.2
Spazi di Hilbert
De…nizione 2.10 Si dice spazio di Hilbert uno spazio pre-Hilbertiano completo.
Quindi uno spazio di Hilbert è uno spazio di Banach la cui norma proviene
da un prodotto interno.
Esempio 2.11 Passiamo in rassegna agli Esempi 2.2 di spazi vettoriali con
prodotto interno e vediamo quali di essi sono spazi di Hilbert.
Gli esempi 1, 2, 3, 4 sono …nito dimensionali. Questi sono tutti spazi di
Hilbert, per la completezza di Rn .
Gli esempi 4-5 (funzioni continue, prodotto scalare integrale) danno spazi
non completi (sappiamo già che le norme integrali non rendono completo uno
spazio di funzioni continue), quindi non di Hilbert.
L’esempio 6 è L2 ( ), con il prodotto scalare integrale. Questo è di Hilbert
(completezza degli spazi Lp ), ed è l’esempio più importante per il seguito del
discorso. Si noti che stiamo parlando di L2 su un qualsiasi spazio di misura
astratto ( ; M; ), non solo un dominio di Rn con la misura di Lebesgue.
L’esempio 7 è un caso particolare del precedente quando la misura è quella
del conteggio su N. Si ottiene lo spazio `2 di successioni, col prodotto scalare
che generalizza quello usuale di Rn al caso in…nito dimensionale. In un certo
senso lo spazio `2 si può pensare come una sorta di “spazio R1 ”, dove però la
successione
delle coordinate è soggetta a un vincolo preciso, la convergenza della
P
2
serie
jxn j .
Nota storica. La teoria astratta degli spazi di Hilbert fu formulata da von
Neumann alla …ne degli anni 1920, come strumentazione matematica per la meccanica quantistica. In questa sua applicazione, è la teoria degli spazi di Hilbert
complessi quella che serve; questo è il motivo per cui abbiamo dato almeno le
de…nizioni iniziali nel caso complesso. Nel seguito del discorso, per semplicità,
considereremo quasi sempre spazi reali, soprattutto nelle dimostrazioni. Hilbert
fu il primo a introdurre lo spazio `2 , nei primi anni del 1900, e a gettare le basi
per l’interesse per questi tipi di spazi vettoriali in…nito dimensionali. Ricordiamo
che la teoria degli spazi di Banach (di cui quelli di Hilbert sono un caso particolare) ebbe il suo importante avvio con il lavoro di Banach del 1932 “Teoria degli
operatori lineari”, quindi fu successiva alla teoria degli spazi di Hilbert. Segnaliamo anche che, mentre nella nostra trattazione introduttiva ci occuperemo
principalmente della geometria degli spazi di Hilbert e di alcune proprietà dei
funzionali lineari continui su spazi di Hilbert, gli sviluppi più signi…cativi della
teoria degli spazi di Hilbert (così come quella degli spazi di Banach, che non
trattiamo) riguardano la teoria degli operatori lineari de…niti su questi spazi.
Negli spazi di Hilbert il teorema di Pitagora dimostrato in precedenza si
estende a somme in…nite, al modo seguente:
13
1
Teorema 2.12 (di Pitagora, 2a versione) Se fxj gj=1 è una successione di
elementi di
spazio di Hilbert H a due a due
Puno
P1ortogonali e tali che la serie
1
2
numerica j=1 kxj k converge, allora la serie j=1 xj converge in H e vale la
1
X
2
=
xj
1
X
j=1
j=1
2
kxj k :
Dimostrazione. Possiamo anzitutto applicare il teorema di Pitagora in versione …nita ad ogni somma parziale della serie, e scrivere
m
X
2
xj
=
j=n
m
X
j=n
2
kxj k :
(2.2)
P1
2
Poiché la serie numerica j=1 kxj k converge, le sue somme parziali sono una
Pm
2
successione di Cauchy, quindi j=n kxj k ! 0 per n; m ! 1: Per l’uguaglianza
Pm
(2.2) le somme parziali di j=n xj sono allora una successione di Cauchy in H,
ed essendo lo spazio completo la serie converge. Dunque esiste x 2 H tale che
n
X
j=1
n
X
xj ! x; perciò
2
2
xj
! kxk :
j=1
D’altro canto
Pn
j=1
2
xj
=
Pn
2
j=1
n
X
j=1
(2.3)
kxj k ; perciò
2
2
kxj k ! kxk .
(2.4)
Da (2.3) e (2.4) segue
1
X
j=1
2
kxj k =
1
X
2
xj
:
j=1
Il risultato fondamentale sulla geometria degli spazi di Hilbert è il seguente:
Teorema 2.13 (Distanza da un sottospazio chiuso, o Teorema della
proiezione). Sia H uno spazio di Hilbert e V un suo sottospazio vettoriale
chiuso. Allora per ogni x 2 H esiste un unico v 2 V di minima distanza da x,
ossia tale che
kx vk = inf kx vk :
v2V
Inoltre x
v è ortogonale a V . L’elemento v si dice proiezione di x su V .
14
Dimostrazione. Proviamo l’esistenza. Se x 2 V basta porre v = x, perciò
supponiamo x 2
= V . Sia d = inf v2V kx vk. (Questo inf esiste perché V non
1
è vuoto e kx vk 0). Sia fxn gn=1 V una successione minimizzante, ossia
tale che
kx xn k ! d:
(Tale successione esiste per de…nizione di estremo inferiore). Proviamo che
questa successione è di Cauchy. Si utilizza a questo scopo l’uguaglianza del
parallelogramma:
kxn
2
xm k = k(xn
x) + (x
=
x)
k(xn
2
xm )k
(x
2
2
xm )k + 2 kxn
2
xk + kx
xm k
:
Ora, per n; m ! 1 si ha:
2
xk ! d2 ;
kxn
k(xn
x)
(x
2
xm k ! d2 ;
kx
2
2
xm )k = kxn + xm
2xk = 4
2
xn + xm
2
perché, essendo V un sottospazio vettoriale, xn ; xm 2 V =)
segue che
2
lim kxn xm k
4d2 + 2 d2 + d2 = 0;
4d2
x
xn +xm
2
2 V: Ne
n;m!1
1
cioè kxn xm k ! 0, ossia fxn gn=1 è di Cauchy. Poiché H è completo, esiste
allora v 2 H tale che xn ! v; inoltre, poiché V è un sottospazio chiuso di H,
v 2 V . In…ne, poiché
kxn
kxn
xk ! kv
xk ! d;
xk e
si ha kv xk = d. Questo completa la dimostrazione dell’esistenza dell’elemento
di V di minima distanza da x.
Proviamo ora l’unicità. Siano dunque v1 ; v2 due elementi di V tali che
kvi
xk = d per i = 1; 2
e proviamo che allora v1 = v2 . Si usa ancora l’uguaglianza del parallelogramma,
in modo simile a quello già visto:
kv1
2
2
v2 k = k(v1
x) + (x
v2 )k
=
k(v1
x)
(x
=
4
v1 + v2
2
x
2
v2 )k + 2 kv1
2
+ 2 d2 + d2
4d2 + 4d2 = 0
15
2
xk + kx
v2 k
2
2
2
in quanto v1 ; v2 2 V ) v1 +v
2 V ) v1 +v
x
d: Dunque kv1 v2 k = 0,
2
2
ossia v1 = v2 :
Prima di dimostrare l’ultimo punto del teorema (ortogonalità di x v a V )
ragioniamo sul signi…cato geometrico di questa proprietà, lasciandoci guidare
dall’analogia con il caso …nito dimensionale. Se V è un sottospazio (chiuso) di
H e x è un elemento di H che non appartiene a V , dal punto di vista geometrico
chi sarà l’elemento v 2 V di minima distanza da x? Sarà la proiezione ortogonale
di x su V . Questo signi…ca appunto che x v è ortogonale a tutti gli elementi
di V .
Dimostriamolo. Sia w = x v, v 2 V qualsiasi, e proviamo che (w; v) = 0.
Per ogni 2 R, scriviamo (essendo v + v 2 V e kwk = d)
2
kwk
2
kx
(v + v)k = k(x
= (w
v; w
2
= kwk
v) = (w; w)
2
2 (v; w) +
kvk
da cui
2 (v; w)
Ponendo
v)
2
kvk
2
2
vk = kw
2 (v; w) +
2
vk
2
(v; v)
2
8 2 R:
= tsgn(v; w) con t > 0 la precedente si riscrive così
2t j(v; w)j
t2 kvk
2
8t > 0;
da cui dividendo per t e facendo tendere t a zero si ottiene (v; w) = 0, che è la
tesi.
Corollario 2.14 (Decomposizione ortogonale di H rispetto a un suo
sottospazio chiuso). Se H è uno spazio di Hilbert e V un suo sottospazio
chiuso si ha:
H = V V ?;
16
dove si legge somma diretta e signi…ca quanto segue:
ogni elemento x 2 H si può scrivere come somma di un elemento v 2 V e
un elemento v 0 2 V ? , inoltre V \ V ? = f0g. Le due cose insieme implicano che
la scrittura x = v + v 0 con v 2 V e v 0 2 V ? è unica.
Dimostrazione. Sia V un sottospazio chiuso di H. Se V = H allora V ? = f0g
e la tesi è ovvia. Altrimenti, preso un x 2 H, per il Teorema della proiezione
possiamo scrivere x = v + (x v) con v 2 V e (x v) 2 V ? . E’ poi ovvio
che V \ V ? = f0g in quanto se x 2 V \ V ? si ha (x; x) = 0 e quindi x = 0.
Mostriamo anche che la scrittura di un elemento x 2 H nella forma x = v + v 0
con v 2 V e v 0 2 V ? è unica. Supponiamo che esistano due scritture:
x = v1 + v10 = v2 + v20
con v1 ; v2 2 V e v10 ; v20 2 V ? . Allora si ha:
v1
v2 = v20
v10 :
Il primo membro è un elemento di V , il secondo membro un elemento di V ? ,
allora poiché V \ V ? = f0g si ha v1 v2 = 0 = v20 v10 ; da cui v1 = v2 ; v20 = v10
ossia la scrittura è unica.
3
Funzionali lineari continui su uno spazio di
Hilbert
Abbiamo visto in precedenza (v. Teorema 2.5) che ogni elemento x di uno spazio
di Hilbert permette di de…nire un funzionale lineare continuo su H mediante
prodotto scalare con x stesso. In altre parole,
ad ogni x 2 H è associato un Tx 2 H 0 tale che
Tx : H ! R
Tx : y 7! (y; x) ;
e risulta kTx kH 0 = kxkH :
Un risultato fondamentale sugli spazi di Hilbert a¤erma che vale anche il
viceversa: ogni funzionale lineare continuo è necessariamente del tipo appena
descritto.
Teorema 3.1 (di rappresentazione di Riesz) Sia H uno spazio di Hilbert
e T un funzionale lineare continuo su H (ossia T 2 H 0 ). Allora esiste un unico
x 2 H che rappresenta T , nel senso che
T y = (y; x) per ogni y 2 H:
Inoltre kT kH 0 = kxkH : Si dice perciò che il duale H 0 di uno spazio di Hilbert
H si può identi…care con H stesso.
17
Dimostrazione. Proviamo prima l’esistenza di x. Se T è il funzionale identicamente nullo basta porre x = 0, quindi supponiamo che T non sia identicamente
nullo. Per provare l’esistenza di x, proviamo prima a “indovinare” chi può essere. Se esiste x tale che T y = (y; x), T y si annullerà per tutti gli y ortogonali
a x; dunque x è un opportuno elemento ortogonale all’insieme degli y su cui si
annulla T . Guidati da quest’idea, consideriamo il nucleo di T , ossia l’insieme:
KerT = fy 2 H : T y = 0g :
Si dimostra facilmente che KerT è un sottospazio vettoriale di H (per linearità di T ) ed è chiuso (per continuità di T ). Allora per il Corollario 2.14
possiamo scrivere
H = KerT KerT ? .
Sia z 2 KerT ? con kzk = 1 (poiché stiamo supponendo T non identicamente
nullo, KerT non esaurisce H, perciò KerT ? ha elementi non nulli e quindi,
essendo uno spazio vettoriale, ha elementi non nulli di norma unitaria). In base
al ragionamento iniziale, l’elemento x che cerchiamo dovrebbe essere del tipo
x = z per qualche 2 R. Il prossimo argomento determinerà in modo che
x = z soddis… e¤ettivamente la proprietà richiesta.
Per ogni y 2 H; l’elemento
Ty
z
y
Tz
appartiene a KerT; in quanto
T
Ty
z
Tz
y
Ty
T z = 0:
Tz
= Ty
(Si noti che ha senso dividere per T z in quanto z è un elemento non nullo di
KerT ? , quindi T z 6= 0): Allora y TT yz z è ortogonale a z, quindi,
0=
z; y
Ty
z
Tz
Ty
(z; z) = (z; y)
Tz
= (z; y)
Ty
;
Tz
da cui
T y = T z (z; y) = (x; y) ;
avendo posto
x = (T z) z:
Questo prova l’esistenza. Il fatto che risulti kT kH 0 = kxkH è già stato provato
nel Teorema 2.5 (ora che sappiamo che T = Tx ).
Proviamo l’unicità. Se esistono due elementi x1 ; x2 2 H tali che
T y = (y; x1 ) = (y; x2 ) per ogni y 2 H
ne segue
(y; x2
e scegliendo y = x2
x1 ) = 0 per ogni y 2 H;
x1 si ottiene x2
x1 = 0; da cui l’unicità.
18
Osservazione 3.2 (Duale di L2 ( )) Osserviamo che nel caso particolare H =
L2 ( ) ; il teorema precedente garantisce che ogni funzionale lineare continuo su
L2 si rappresenti nella forma
Z
Tf =
fg
0
per qualche g 2 L2 ( ). Ritroviamo quindi il risultato di dualità L2 ( ) =
L2 ( ) ; che è un caso particolare del teorema (che abbiamo enunciato ma non
dimostrato) secondo cui il duale di Lp ( ) è Lq ( ) con p; q esponenti coniugati,
se 1 p < 1.
Il teorema precedente è un risultato fondamentale. Vediamo subito una delle
sue conseguenze importanti: il teorema di Lax-Milgram, che gioca un ruolo
fondamentale nella formulazione debole dei problemi ai limiti per equazioni a
derivate parziali, di cui ci occuperemo nell’ultima parte del corso. Premettiamo
qualche de…nizione.
De…nizione 3.3 Sia H uno spazio di Hilbert. Si dice forma bilineare su H una
funzione
a( ; ) : H H ! R
che è lineare in ognuno dei due argomenti, quando l’altro è …ssato. Esplicitamente, signi…ca che, per ogni u; v; w 2 H e ; 2 R è
a ( u + v; w) = a (u; w) + a (v; w)
a (w; u + v) = a (w; u) + a (w; v) :
Una forma bilineare su H si dice:
continua se esiste una costante c > 0 tale che
ja (u; v)j
c kuk kvk per ogni u; v 2 H;
coerciva se esiste una costante c0 > 0 tale che
a (u; u)
2
c0 kuk per ogni u 2 H;
simmetrica se
a (u; v) = a (v; u) per ogni u; v 2 H:
Esempio 3.4 1. In qualunque spazio di Hilbert, il prodotto scalare è una forma
bilineare simmetrica, continua (con c = 1, per la disuguaglianza di CauchySchwarz) e coerciva (con c = 1, per de…nizione di norma del prodotto scalare).
2. In Rn una forma bilineare ha sempre la forma:
a (u; v) =
n
X
i;j=1
19
aij ui vj
n
per un’opportuna matrice A = (aij )i;j=1 . La forma bilineare è simmetrica se la
matrice A è simmetrica; è sempre continua; è coerciva se la matrice è de…nita
positiva, con c =minimo autovalore di A.
3. In L2 ( ) si consideri
Z
a (u; v) =
(x) u (x) v (x) dx;
con funzione L1 ( ) assegnata. Questa è una forma bilineare simmetrica e
continua, qualunque sia 2 L1 ( ). E’ coerciva solo se (x) c0 > 0 quasi
ovunque in .
Veniamo al risultato annunciato:
Teorema 3.5 (di Lax-Milgram) Sia H uno spazio di Hilbert e a (u; v) una
forma bilineare continua e coerciva su H. Si consideri il seguente problema:
(P). Assegnato T 2 H 0 (cioè T funzionale lineare continuo su H), determinare u 2 H tale che
a (u; v) = T v per ogni v 2 H:
Sotto le ipotesi precedenti, per ogni T 2 H 0 esiste uno e un solo u 2 H
soluzione del problema (P). Inoltre vale la seguente stima di stabilità:
kukH
1
kT kH 0
c0
dove c0 è la costante che compare nell’ipotesi di coercività.
Questo teorema servirà per provare un risultato di esistenza, unicità e dipendenza continua dai dati, per certi problemi ai limiti per equazioni a derivate
parziali, dopo che questi avranno avuto un’opportuna “formulazione debole”.
Tutto ciò sarà spiegato in dettaglio nell’ultima parte del corso. Per il momento vediamo questo teorema come un risultato astratto di esistenza, unicità e
dipendenza continua dal termine noto T , per la soluzione del problema astratto (P). “Dipendenza continua” signi…ca quanto segue. Il problema è lineare,
nel senso che se u1 ; u2 sono soluzioni del problema (P) con assegnati T1 ; T2
rispettivamente, allora u1 + u2 sarà soluzione del problema (P) con assegnato
T1 + T2 . In particolare allora la stima di stabilità implica che, con le notazioni
precedenti,
1
ku1 u2 kH
kT1 T2 kH 0 ,
c0
stima che si può interpretare al modo seguente: se il dato T1 è vicino al dato
T2 ; anche la soluzione corrispondente a T1 è vicina alla soluzione corrispondente
a T2 . In questo senso la soluzione è stabile rispetto a una perturbazione del
termine noto, o anche “dipende con continuità dal termine noto”.
Dimostrazione. Per semplicità dimostriamo il teorema sotto un’ipotesi aggiuntiva: che la forma bilineare sia anche simmetrica. (La dimostrazione in
20
assenza di quest’ipotesi è sensibilmente più elaborata, e quest’ipotesi risulterà
veri…cata in diverse applicazioni signi…cative che faremo di questo teorema).
Notiamo che una forma bilineare simmetrica e coerciva su H soddisfa gli
assiomi di prodotto scalare. In altre parole, se poniamo
(u; v) = a (u; v)
(l’asterisco ricorda che questo non è il prodotto scalare originale in H; ma uno
diverso), si ha che:
(u; v) è bilineare perché la forma è bilineare;
(u; v) è commutativo perché la forma è simmetrica;
vale la proprietà di positività perché la forma è coerciva:
(u; u) = a (u; u) c0 kuk 0; quindi (u; u) = 0 =) kuk = 0 e u = 0.
Consideriamo ora la norma indotta da questo nuovo prodotto scalare:
q
kuk = (u; u) :
Per la continuità e coercività, risulta:
kuk =
kuk =
ossia
p
q
p
2
c kuk = c kuk
q
p
2
c0 kuk = c0 kuk
p
a (u; u)
p
a (u; u)
c0 kuk
kuk
p
c kuk per ogni u 2 H:
Le due norme sono dunque equivalenti ; in particolare questo signi…ca che se T
è un funzionale lineare su H continuo rispetto alla norma originaria, kuk, lo è
anche rispetto alla norma kuk : Infatti, per ogni v 2 H si ha
r
p
p
c
kT kH 0 kvk :
kT vk
c kT vk
c kT kH 0 kvk
c0
Possiamo allora applicare il teorema di rappresentazione di Riesz allo spazio di
Hilbert H dotato del prodotto scalare (u; v) ed a¤ermare che esiste uno e un
solo elemento u 2 H tale che
(u; v) = T v per ogni v 2 H; cioè
a (u; v) = T v per ogni v 2 H;
che è quanto volevamo provare. Quanto alla norma di u, si ha:
c0 kuk
2
a (u; u) = T u
da cui
kuk
kT kH 0 kuk ;
1
kT kH 0
c0
che è la stima di stabilità.
21
4
Analisi di Fourier in spazi di Hilbert
Andremo ora più a fondo del concetto di ortogonalità, vedendo come opportuni
sistemi di vettori ortogonali possano costituire, in uno spazio di Hilbert astratto
così come avveniva in Rn , un buon “sistema di riferimento”.
1
n
De…nizione 4.1 Un insieme …nito fej gj=1 o numerabile fej gj=1 di elementi
di H si dice sistema ortonormale se
0 se i 6= j
1 se i = j:
(ei ; ej ) =
In altre parole, i vettori sono a due a due ortogonali, e ciascuno ha norma
unitaria.
Notazione. In questo paragrafo considereremo spesso combinazioni lineari
di vettori, ed è importante distinguere a colpo d’occhio i vettori dalle costanti
che li moltiplicano. Cambiando leggermente notazioni quindi, scriveremo ad
n
esempio ej j=1 per indicare i vettori e
n
X
cj ej
j=1
per indicare una loro combinazione lineare, dove le cj sono costanti.
Cominciamo con l’illustrare alcuni procedimenti e idee che riguardano i
sottospazi di dimensione …nita di uno spazio di Hilbert.
Ricordiamo anzitutto che in base al teorema di Pitagora in spazi di Hilbert
si può scrivere:
n
X
j=1
2
cj ej
=
n
X
cj ej
2
j=1
=
n
X
j=1
2
jcj j :
(4.1)
Quest’uguaglianza in particolare implica che vettori che costituiscono un
sistema ortonormale …nito sono sempre linearmente indipendenti. Infatti se
n
X
cj ej = 0
j=1
per certe costanti c1 ; c2 ; :::; cn , in base a (4.1) si ha
n
X
j=1
2
jcj j = 0
e quindi cj = 0 per j = 1; 2; :::; n; perciò i vettori sono indipendenti.
22
Un sistema ortonormale …nito costituisce quindi una base dello spazio vettoriale da essi generato. Viceversa, se V0 è un sottospazio …nito dimensionale di
n
H, data una qualsiasi base uj j=1 di V0 è sempre possibile a partire da questa
generarne un’altra che sia costituita da vettori ortonormali. E’su¢ ciente adoperare il procedimento di ortonormalizzazione di Gram-Schmidt, che illustriamo
iterativamente così:
e1 = vers (u1 )
(dove, qui e nel seguito, indichiamo vers (u) =
e2 = vers (u2
u
kuk );
(u2 ; e1 ) e1 )
(spiegazione: dopo aver normalizzato il primo vettore, consideriamo il secondo e
gli sottraiamo la sua componente nella direzione del primo; così u2 (u2 ; e1 ) e1
risulta ortogonale a e1 ; ora lo normalizziamo e abbiamo e2 );
e3 = vers (u3
(u3 ; e1 ) e1
(u3 ; e2 ) e2 )
e così via …no a ottenere una base ortonormale ej
n
j=1
di V0 .
Supponiamo ora che V0 , sottospazio …nito dimensionale di H, sia dotato
n
di una base ortonormale ej j=1 (cosa che, come appena visto, si può sempre
supporre). Dato un elemento x2 H; il suo elemento di minima distanza da V0
(che sappiamo già esistere in base al teorema delle proiezioni) non è altro che:
PV0 x =
n
X
x; ej ej :
j=1
Infatti PV0 x 2 V0 e si veri…ca facilmente che x PV0 x 2 V0? . E’ su¢ ciente
calcolare per k = 1; 2; :::; n il prodotto scalare
(x
PV0 x; ek ) = (x; ek )
n
X
x; ej
ej ; ek = (x; ek )
(x; ek ) = 0:
j=1
Quindi la scrittura
x = PV0 x + (x
PV0 x)
mostra, in base al teorema delle proiezioni, che l’elemento di minima distanza di
x da V0 è proprio PV0 x: Ecco quindi che la conoscenza di una base ortonormale
in V0 dà un algoritmo semplice ed esplicito per calcolare l’elemento di minima
distanza di un vettore qualunque da V0 ; mediante la sua proiezione ortogonale.
Prima di proseguire sarà utile illustrare queste idee con un esempio concreto:
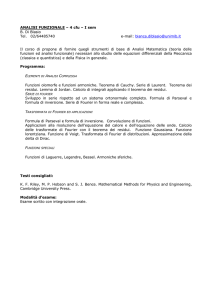
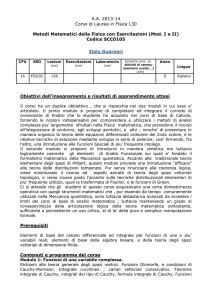
Esempio 4.2 Determinare il polinomio di grado 2 che approssima meglio la
funzione f (x) = sin ( x) in L2 (0; 1) :
Ragioniamo così: sia V0 lo spazio vettoriale dei polinomi di grado
2 su
[0; 1]. E’ uno spazio vettoriale di dimensione …nita (3), quindi chiuso; è un
23
sottospazio di L2 (0; 1) : Il polinomio di grado
2 che approssima meglio la
funzione f in L2 (0; 1) è la proiezione di f su V0 . Per calcolarla, dobbiamo prima costruire una base ortonormale in V0 . Per farlo, partiamo da una base
qualunque di V0 , sceglieremo quella più semplice, costituita da 1; x; x2 , e la
ortonormalizziamo in L2 (0; 1) mediante il procedimento di Gram-Schmidt:
1
e1 = vers (1) =
R1
0
Z
1
x
0
e2 = vers (x (x; e1 ) e1 ) ;
Z 1
1
(x; 1) =
xdx = ;
2
0
!1=2 r
2
1
1
1
dx
=
= p ;
2
12
2 3
p
1
;
e2 = 2 3 x
2
e3 = vers x2
x2 ; 1 =
Z
x2 ; e1 e1
1
x2 dx =
0
2
x ; e2 =
Z
1
2
1
;
3
x 2 3 x
x2 ; e1 e1
x2 ; e2 e2
L2
0
=@
=
Z
1
1
3
x2
0
Z
1
1
x+
6
2
x
0
p
e3 = 6 5 x2
x+
x2 ; e2 e2 ;
p
1
3
dx =
;
2
6
p
3 p
2 3 x
6
p
0
x2
= 1:
1=2
12 dx
1
6
2
!1=2
dx
=p
:
Ricapitoliamo: una base ortonormale di V0 è costituita dai 3 vettori:
e1 = 1;
p
e2 = 2 3 x
p
e3 = 6 5 x2
1
2
;
x+
1
6
:
Ora bisogna calcolare la proiezione di f su V0 ; cioè:
PV0 f = (f; e1 ) e1 + (f; e2 ) e2 + (f; e3 ) e3 :
24
1
2
!2
11=2
dxA
1
1
= p ;
180
6 5
Calcoliamo dunque:
Z 1
2
(f; e1 ) =
sin ( x) dx = ;
0
(f; e2 ) =
Z
1
p
sin ( x) 2 3 x
1
2
0
(f; e3 ) =
Z
1
p
sin ( x) 6 5 x2
dx = 0;
1
x+
6
0
dx =
p
2 5
2
3
12
:
Perciò
PV0 f =
=
2
+
60
p
2 5
2
12
3
2
12
3
x2
p
6 5 x2
x +
12
x+
2
1
6
120
3
:
Rappresentiamo la funzione f insieme alla sua approssimante:
Supponiamo ora di avere a disposizione (e vedremo in seguito che sarà pro1
prio così in molti esempi interessanti) una successione ej j=1 di vettori che
costituiscono un sistema ortonormale. I procedimenti illustrati precedentemente
si possono applicare iterativamente ai primi n vettori di questa successione, per
n crescente. Si ottiene allora il seguente importante risultato:
1
Teorema 4.3 (Disuguaglianza di Bessel) Se ej j=1 è un sistema ortonormale in uno spazio di Hilbert H; per ogni x2 H vale la disuguaglianza (di
Bessel):
1
X
2
2
x; ej
kxk :
j=1
25
In particolare, la serie a primo membro converge. Inoltre:
2
n
X
x
x; ej ej
= kxk
j=1
n
X
2
x; ej
2
:
(4.2)
j=1
Dimostrazione. Applichiamo il teorema delle proiezioni e quanto sopra ossern
vato al sottospazio V0 generato dai primi n vettori ej j=1 . Si ha:
n
X
x; ej
2
j=1
= kPV0 xk
2
2
kxk
per n = 1; 2; 3; ::: Passando al limite per n ! 1 si ha la tesi (ricordiamo che
una serie numerica a termini positivi con somme parziali superiormente limitate
è convergente).
D’altro canto la scomposizione
x = PV0 x + (x
PV0 x)
dà, per l’ortogonalità,
2
2
kxk = kPV0 xk + kx
PV0 xk
2
e quindi
x
n
X
j=1
2
x; ej ej
= kx
2
PV0 xk = kxk
2
2
kPV0 xk = kxk
2
n
X
x; ej
2
:
j=1
L’idea dell’analisi di Fourier in spazi di Hilbert è approssimare un elemento
x di H mediante la sua proiezione su opportuni sottospazi …nito dimensionali.
Pn
2
Poiché al crescere di n la somma j=1 x; ej
aumenta, dalla (4.2) del teore2
ma precedente leggiamo che la distanza kx PV0 xk diminuisce. Ci piacerebbe
poter a¤ermare che questa distanza non solo diminuisce ma tende a zero. Signi…cherebbe che abbiamo un metodo per approssimare bene quanto vogliamo
un generico elemento di uno spazio di Hilbert, mediante combinazioni lineari di
elementi del sistema ortonormale …ssato. D’altro canto a¢ nché questo accada è
1
necessario che il sistema ortonormale ej j=1 sia su¢ cientemente ricco da “catturare tutte le direzioni di H”: se ad esempio in R3 considerassimo un sistema
ortonormale costituito da soli due vettori, certamente non potremmo approssimare bene quanto vogliamo un generico elemento di R3 con combinazioni lineari
di questi due vettori. Questo porta alla seguente
De…nizione 4.4 Sia H uno spazio di Hilbert. Un sistema ortonormale ej
in H si dice completo se per ogni x2 H,
x; ej = 0
8j
26
=) x = 0:
1
j=1
Si può dimostrare che:
Teorema 4.5 In ogni spazio di Hilbert separabile esiste un sistema ortonormale
completo, nel senso della precedente de…nizione1 .
Ricordiamo che “separabile” signi…ca: che contiene un sottoinsieme denso
numerabile. Ad esempio, se
è un sottoinsieme misurabile di Rn lo spazio
2
L ( ) è separabile. Questo è l’esempio fondamentale che ci interesserà nel seguito. Dal punto di vista pratico il teorema precedente non è così importante
nel senso che quando si applica la teoria di solito si conosce esplicitamente un
sistema ortonormale completo, dunque non c’è bisogno di appellarsi a un risultato astratto per garantirne l’esistenza. Ad esempio, come vedremo, in L2 [a; b]
il classico sistema trigonometrico è l’esempio più noto di sistema ortonormale
completo.
Il prossimo teorema condensa i risultati fondamentali di analisi di Fourier in
spazi di Hilbert:
Teorema 4.6 (Serie e trasformata di Fourier in spazi di Hilbert) Sia H
1
uno spazio di Hilbert e ej j=1 un sistema ortonormale completo. Per ogni
x2 H; poniamo
x
bj = x; ej per j = 1; 2; 3; :::
Allora
1. La serie di Fourier di x converge in H ad x, cioè:
x=
1
X
j=1
2. L’operatore
x
bj ej
1
F : x 7! fb
xj gj=1
detto trasformata di Fourier su H, è lineare e continuo a valori nello spazio di
successioni `2 ; più precisamente, F è una isometria tra spazi di Hilbert, cioè è
biunivoca e conserva il prodotto scalare e la norma, ossia:
x; y =
1
X
j=1
x
bj ybj 8x; y 2 H (uguaglianza di Plancherel)
(il coniugato ybj è necessario se H è uno spazio di Hilbert complesso);
2
kxk =
1
X
j=1
2
jb
xj j
8x; y 2 H (uguaglianza di Perceval).
1 Si può dare una de…nizione di sistema ortonormale, e quindi di sistema ortonormale completo, non solo …nito o numerabile, ma di cardinalità qualsiasi. Il teorema allora andrebbe
riformulato dicendo “In ogni spazio di Hilbert separabile esiste un sistema ortonormale completo numerabile ”. Non entriamo in questi dettagli perché non ci interesseranno mai spazi di
Hilbert non separabili.
27
Dimostrazione.
L’operatore F è evidentemente lineare; per la disuguaglianza
P1
2
2
1
di Bessel, j=1 jb
xj j
kxk ; in particolare fb
xj gj=1 2 `2 .
1
Mostriamo che F è suriettiva. Data una successione fcj gj=1 2 `2 ; cioè tale
P1
P1
2
che j=1 jcj j < 1; per il Teorema di Pitagora 2.12 la serie j=1 cj ej converge
in H ad un certo elemento x; calcoliamo ora:
!
1
X
ck ek ; ej =
x
bj = x; ej =
k=1
per linearità e continuità del prodotto scalare
=
1
X
ck ek ; ej
k=1
per l’ortonormalità del sistema
= cj .
1
1
Dunque abbiamo costruito un elemento x2 H tale che fb
xj gj=1 = fcj gj=1 ;
perciò F è suriettiva.
1
L’iniettività di F segue dalla completezza del sistema ej j=1 : se x
bj = 0
8j ossia x; ej = 0 8j; allora x= 0; per de…nizione di sistema ortonormale
completo. Dunque F è lineare e biunivoca tra H e `2 . Mostriamo ora che la
serie di Fourier di x converge proprio a x. Segue ancora dalla completezza del
sistema, infatti:
!
1
X
x
(x; ek ) ek ; ej =
(4.3)
k=1
per la linearità e la continuità del prodotto scalare
= x; ej
1
X
k=1
(x; ek ) ek ; ej = x
bj
per l’ortonormalità del sistema
=x
bj
x
bj = 0:
1
X
k=1
x
bk ek ; ej
Dunque essendo il prodotto scalare (4.3) nullo per ogni j, per la completezza
del sistema segue che
1
X
(x; ek ) ek = 0; ossia
x
k=1
x=
1
X
k=1
x
bk ek ,
che è la convergenza della serie di Fourier.
28
Sapendo questo, l’uguaglianza di Plancherel segue dalla bilinearità e continuità del prodotto scalare:
0
1
1 X
1
1
1
X
X
X
x; y = @
x
bk ek ;
ybj ej A =
x
bk ybj ek ; ej =
k=1
j=1
e per l’ortonormalità
=
k=1 j=1
1
X
j=1
x
bk ybj :
In…ne, l’uguaglianza di Perceval segue dall’uguaglianza di Plancherel per y= x:
Come si vede, gli spazi di Hilbert dotati di un sistema ortonormale completo
numerabile (cioè, per il Teorema 4.5, gli spazi di Hilbert separabili ) sono un
ambiente estremamente naturale per l’analisi di Fourier: i risultati del teorema
precedente sono infatti esaurienti e “puliti”: la serie di Fourier di qualsiasi
elemento x converge ad x, e la trasformata di Fourier è un’isometria tra spazi
di Hilbert, il che signi…ca che tutta l’informazione che identi…ca l’elemento x è
1
codi…cata nella successione numerica fb
xj gj=1 . Naturalmente per applicare la
teoria ad uno spazio di funzioni concreto occorre conoscerne esplicitamente un
sistema ortonormale completo. Nel seguito incontreremo alcuni esempi espliciti
di sistemi ortonormali completi in vari spazi di Hilbert di tipo L2 ( ).
Si ri‡etta anche sul fatto che qualsiasi spazio di Hilbert separabile risulta
identi…cato, tramite la trasformata di Fourier, con lo spazio `2 ; dal punto di
vista della struttura astratta esiste quindi un solo spazio di Hilbert separabile!
5
5.1
Applicazioni all’analisi armonica
Il sistema trigonometrico. Serie di Fourier in una o
due variabili
Teorema 5.1 Nello spazio L2 [
; ], il sistema trigonometrico
1 cos nx sin nx
p ; p ; p
per n = 1; 2; 3; :::
2
(5.1)
è ortonormale completo.
Dimostrazione. L’ortonormalità si veri…ca elementarmente calcolando opportuni integrali (questo è stato fatto in Analisi 2). Proviamo la completezza. Si
tratta di dimostrare che se f 2 L2 [ ; ] è ortogonale a tutti gli elementi del
sistema trigonometrico (5.1) (il che è come dire: se f ha i coe¢ cienti di Fourier
tutti nulli) allora f è uguale a zero quasi ovunque in [ ; ] (cioè è l’elemento
nullo di L2 [ ; ]). La dimostrazione procede in due passi.
1. Prima si prova la tesi supponendo che f sia anche continua. Notiamo
anzitutto che se f è ortogonale a tutti gli elementi del sistema trigonometrico,
29
per linearità è ortogonale a tutte le combinazioni lineari …nite di questi elementi,
ossia: per ogni polinomio trigonometrico p (x) si ha:
Z
f (x) p (x) dx = 0:
(5.2)
Mostriamo che sotto quest’ipotesi f è identicamente nulla. Per assurdo, non lo
sia, e sia ad esempio f (x0 ) > 0 (se è < 0 il ragionamento è analogo). Per il
teorema di permanenza del segno esiste un > 0 tale che
f (x) >
f (x0 )
8x 2 (x0
2
; x0 + ) :
Consideriamo ora il polinomio trigonometrico
t (x) = 1 + cos (x
x0 )
cos :
Si veri…ca che
t (x) > 1 per jx
jt (x)j 1 per jx
x0 j <
x0 j
:
n
Inoltre se t (x) è un polinomio trigonometrico, anche t (x) lo è, per n =
1; 2; 3; :::. Perciò si ha:
Z
n
0=
f (x) t (x) dx
Z
Z
n
n
=
f (x) t (x) dx +
f (x) t (x) dx;
[
ossia
Z
[
; ]\jx x0 j<
[
n
f (x) t (x) dx =
; ]\jx x0 j
Z
[
; ]\jx x0 j
n
f (x) t (x) dx:
; ]\jx x0 j<
Ora, il primo membro dell’uguaglianza rimane limitato al crescere di n, perché:
Z
Z
n
n
f (x) t (x) dx
jf (x)j jt (x)j dx
[
; ]\jx x0 j
[
; ]\jx x0 j
[
; ]\jx x0 j
Z
jf (x)j dx;
Mostriamo invece che il secondo membro tende a 1 per n ! 1 (da cui l’assurdo). Scegliamo un intervallo [a; b] contenuto nell’insieme [ ; ] \ jx x0 j < ;
su [a; b] la funzione t (x) avrà minimo m > 1, perciò
Z
Z
f (x0 )
n
n
f (x) t (x) dx
t (x) dx
2
[
; ]\jx x0 j<
[
; ]\jx x0 j<
Z b
Z b
f (x0 )
f (x0 )
f (x0 )
n
t (x) dx
mn dx =
(b a) mn ! 1 per n ! 1:
2
2
2
a
a
30
Questo dimostra il teorema nel caso f continua.
2. Sia ora f 2 L2 [ ; ] tale che per ogni polinomio trigonometrico p (x)
vale (5.2). De…niamo
Z
x
f (t) dt:
F (x) =
La funzione F risulta assolutamente continua ed esiste F 0 (x) = f (x) quasi
ovunque (per il Teorema fondamentale del calcolo integrale per l’integrale di
Lebesgue). Calcoliamo i coe¢ cienti di Fourier di F .
Z
Z
sin (nx)
sin (nx)
F (x) cos (nx) dx =
F (x)
f (x) dx = 0
n
n
perché il primo addendo è nullo in quanto sin ( n ) = 0; il secondo è nullo
perché f ha coe¢ cienti di Fourier nulli.
Z
Z
cos (nx)
cos (nx)
F (x)
+
f (x) dx =
F (x) sin (nx) dx =
n
n
poiché f ha coe¢ cienti di Fourier nulli
=
perché: F (
cos (n )
cos (n )
F ( )+
F(
n
n
)=0
) = 0 per de…nizione di F come funzione integrale, e
Z
F( )=
f (t) dt = 0
perché f ha anche il coe¢ ciente a0 = 0. In de…nitiva, la funzione F ha nulli i
coe¢ cienti di Fourier Ak e RBk per k
1, mentre non è necessariamente vero
che sia A0 = 0; cioè che sia
F (t) dt = 0. Consideriamo però la funzione
F (x)
A0
= F (x)
2
1
2
Z
F (t) dt:
Questa funzione per de…nizione ha integrale nullo su [ ; ], e d’altro canto
continua ad avere gli altri coe¢ cienti di Fourier nulli. Ne segue che F (x) A20
ha tutti i coe¢ cienti di Fourier nulli, ed è una funzione continua; per la prima
parte della dimostrazione, allora, F (x) A20 è identicamente nulla. Ne segue
che
0
A0
f (x) = F (x)
= 0 quasi ovunque,
2
che è la tesi.
In base al teorema precedente e al Teorema 4.6, possiamo concludere il
risultato di convergenza in L2 [ ; ] delle serie di Fourier:
31
Teorema 5.2 Sia f 2 L2 [
Z
1
ak =
2
Z
1
bk =
2
; ] ; de…niamo
f (x) cos nxdx per n = 0; 1; 2; 3:::
f (x) sin nxdx per n = 1; 2; 3; ::
Allora la serie di Fourier di f
1
a0 X
+
(an cos nx + bn sin nx)
2
n=1
converge ad f in L2 [ ; ] : Esplicitamente, questo signi…ca che:
"
#2
Z
n
a0 X
f (x)
+
(ak cos kx + bk sin kx)
dx ! 0 per n ! 1:
2
k=1
Naturalmente serie e coe¢ cienti di Fourier si possono adattare ad un intervallo [a; b] qualsiasi (v. [1, Cap. 7, §3.4]).
La teoria degli spazi di Hilbert fornisce un risultato semplice e generale sulla convergenza delle serie di Fourier in L2 . Naturalmente è anche interessante
sapere se la serie di Fourier converge puntualmente (cosa che non segue dalla
convergenza in L2 ). In realtà, il problema della convergenza puntuale è il primo
che si è posto, storicamente, col sorgere stesso della teoria delle serie di Fourier
(1822, Fourier, trattato “Teoria analitica del calore”). Il primo studio rigoroso
sulla convergenza puntuale delle serie di Fourier è dovuto a Dirichlet nel 1829.
Si tratta di un problema fondamentale per l’analisi armonica, di cui però non
diremo nulla, in quanto ci interessa qui solo illustrare alcune applicazioni della
teoria degli spazi di Hilbert, che fu creata circa 100 anni dopo le serie di Fourier, come già accennato. Per qualche dettaglio sullo studio della convergenza
puntuale delle serie di Fourier si rimanda a [1, Cap. 7, §3.6] o a [2, Chap.8,
§8.5].
n
Si possono anche de…nire le serie di Fourier in n variabili, sull’insieme [ ; ]
(e quindi, riscalando il sistema trigonometrico, su qualunque “n-parallelepipedo”).
2
Ad esempio, in due variabili si può sviluppare una funzione f (x; y) 2 L2 [ ; ]
in serie di Fourier doppia. Vediamo prima il seguente risultato astratto:
1
Teorema 5.3 Sia fen (x)gn=1 un sistema ortonormale completo in L2 [
Allora
1
fen (x) em (y)gn;n=1
2
è un sistema ortonormale completo in L
[
; ]:
2
; ]
.
Dimostrazione. L’ortonormalità si veri…ca facilmente: per (n; m) 6= (n1 ; m1 )
risulta
Z Z
(en (x) em (y) en1 (x) em1 (y)) dxdy
Z
Z
=
en (x) en1 (x) dx
em (y) em1 (y) dy = 0
32
perché almeno uno dei due integrali è zero, essendo n 6= m o n1 6= m1 ; mentre
Z Z
Z
Z
2
2
jen (x) em (y)j dxdy =
jen (x)j dx
jem (y)j dy = 1 1 = 1:
Quanto alla completezza, sia f 2 L2 [
Z
Z
2
; ]
e supponiamo che sia
f (x; y) en (x) em (y) dxdy = 0 per ogni n; m:
Fissiamo m e consideriamo la funzione
Z
gm (x) =
f (x; y) em (y) dy:
Questa funzione sta in L2 [
Z
2
; ] ; perché
jgm (x)j dx =
Z
Z
2
f (x; y) em (y) dy dx
applicando nell’integrale interno la disuguaglianza di Cauchy-Schwarz
Z
Z
Z
2
2
jf (x; y)j dy
jem (y)j dy dx
Z Z
2
2
=
jf (x; y)j dydx = kf kL2 ([ ; ]2 ) < 1:
Inoltre gm ha tutti i coe¢ cienti di Fourier nulli rispetto al sistema fen (x)g,
dunque gm (x) = 0 quasi ovunque. Questo, per de…nizione di gm ; signi…ca che
per quasi ogni x …ssato la funzione y 7! f (x; y) ha tutti i coe¢ cienti di Fourier
nulli rispetto al sistema fem (y)g ; dunque per q.o. x e per q.o. y è f (x; y) = 0.
Questo prova la completezza del sistema.
La scrittura esplicita del sistema trigonometrico in due variabili è resa complicata dal fatto che occorre moltiplicare ognuna delle tre funzioni
1 cos nx sin nx
p ; p ; p
2
per ognuna delle tre funzioni
1 cos my sin my
p ; p ; p ;
2
mentre viene molto più semplice usando la scrittura complessa
einx
p
2
33
n2Z
e quindi, in due variabili,
ei(nx+my)
2
2
In questo caso si pone, per f 2 L2 [
fbn;m =
1
2
(2 )
Z
Z
:
n;m2Z
; ]
f (x; y) e
i(nx+my)
dxdy per n; m 2 Z
e si ha quindi
f (x; y) =
+1
X
n;m= 1
fbn;m ei(nx+my)
2
con convergenza della serie in L2 [ ; ] . Più esplicitamente, una nozione
di convergenza di una serie de…nita da due indici interi relativi richiede una
de…nizione precisa di somma parziale. Tale de…nizione non è univoca; ad esempio è corretto a¤ermare che, se de…niamo
X
sN (x; y) =
fbn;m ei(nx+my) per N = 0; 1; 2; :::
jnj+jmj N
allora risulta
kf
sN kL2 ([
; ]2 )
! 0 per N ! +1:
Una delle possibili applicazioni delle serie di Fourier in due variabili è alla
compressione delle immagini. Un’immagine in scala di grigi si può vedere come
una funzione f (x; y) de…nita in un rettangolo a valori in [0; 1], dove il valore
f (x; y) rappresenta l’intensità di grigio nel punto (pixel) (x; y), quindi f = 0
vuol dire punto bianco e f = 1 punto nero. Una somma di Fourier parziale
di f immagazzina (in modo approssimato) l’informazione dell’immagine in un
numero limitato di coe¢ cienti di Fourier.
5.2
Base di Haar e wavelets
Nell’utilizzo dell’analisi di Fourier per approssimare un segnale periodico, il
sistema trigonometrico ha, insieme a tanti pregi, un paio di difetti.
1. I polinomi trigonometrici sono funzioni continue e regolari, perciò una
serie di Fourier approssima male una funzione discontinua. L’approssimazione in
L2 rimane, ma non possiamo certamente aspettarci una buona approssimazione
puntuale vicino a un punto di discontinuità.
2. L’approssimazione con polinomi trigonometrici ha una natura globale:
supponiamo di voler approssimare una funzione f 2 L2 [ ; ] che ha un gra…co
“semplice e liscio”in [ ; 0] e piuttosto frastagliato in [0; ]. A¢ nché la somma
parziale di Fourier segua bene il gra…co di f in [0; ] noi dovremo aumentare il
numero di termini, i cui coe¢ cienti sono stati calcolati in base al comportamento
34
di f su tutto [ ; ]; questo signi…ca che l’unico modo di migliorare i dettagli
dell’approssimazione in [0; ] è quello di aumentare i dettagli in tutto [ ; ];
non possiamo ra¢ nare l’approssimazione su una sola parte dell’intervallo.
Per ovviare a questi due difetti, e in particolare al secondo, si possono utilizzare altri tipi di sistemi ortonormali completi di L2 [ ; ], che hanno la
proprietà di permettere un’analisi su scale diverse in parti diverse dell’intervallo, o come si dice, fare una “analisi multirisoluzione”. Sistemi di questo tipo
sono le wavelets. Ce ne sono di molti tipi, presentiamo qui il più semplice.
Ci mettiamo ora nell’intervallo [0; 1]. De…niamo la “funzione madre”
8
per 0 x < 12
< 1
1 per 12 x < 1
(x) =
:
0
altrimenti
e la seguente famiglia di funzioni ottenute traslando e riscalando la funzione
madre:
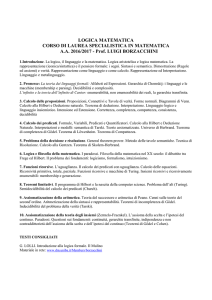
n;k
(x) = 2n=2 (2n x
k) per k = 0; 1; 2; :::; 2n
1; n = 0; 1; 2; 3; :::
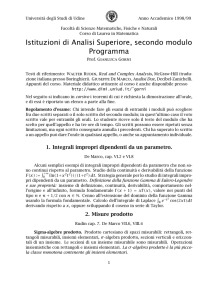
Visualizziamo i gra…ci di alcune di queste funzioni.
Ad esempio per n = 2 e quindi k = 0; 1; 2; 3 si ha:
Confrontiamo invece tra loro funzioni
35
n;k
per diversi valori di n. I gra…ci
di
n;1
per i valori n = 1; 2; 3; 4 sono:
Notiamo che per tutte le funzioni
Z
n;k
1
n;k
(x) dx = 0 e
0
Z
si ha
1
2
n;k
(x) dx = 1:
0
E’ facile rendersi conto che il prodotto tra due funzioni diverse tra le n;k o
è identicamente nullo oppure è una delle due moltiplicata per una costante;
perciò queste funzioni sono anche a due a due ortogonali. Poiché tutte queste
funzioni hanno media nulla, se vogliamo sperare di avere un sistema ortonormale
completo è necessario aggiungere almeno una funzione che non abbia media
nulla: la costante 1 va bene. Vale il seguente
Teorema 5.4 Il sistema di funzioni
f1;
n;k gk=0;1;2;:::;2n 1; n=0;1;2;3;:::
è ortonormale completo in L2 [0; 1] :
Dimostrazione. L’ortonormalità è stata sostanzialmente dimostrata. Per la
completezza, ci limitiamo a segnalare che si può dimostrare che questo sistema
di funzioni è denso nell’insieme delle funzioni semplici (cioè misurabili e che
assumono un numero …nito di valori), che a sua volta è denso in L2 [0; 1].
Dalla completezza del sistema precedente segue:
36
Teorema 5.5 Per f 2 L2 [0; 1] de…niamo:
fb0 =
fbn;k =
Z
1
f (x) dx
0
Z
1
f (x)
n;k
(x) dx per n = 0; 1; 2; 3; :::e k = 0; 1; 2; :::; 2n
1;
0
allora la serie
n
converge a f in L2 [0; 1].
fb0 +
1 2X1
X
n=0 k=0
fbn;k
n;k
(x)
Poiché le n;k ; e quindi ogni loro somma parziale, è una funzione discontinua, ci aspettiamo che questo tipo di serie possa approssimare bene anche
funzioni con discontinuità; l’altra faccia della medaglia è che la somma parziale
sarà sempre discontinua, anche quando la funzione da approssimare è continua.
Soprattutto, però, il pregio di questa approssimazione è la sua localizzabilità:
ogni n;k è diversa da zero solo in un intervallino, perciò scegliendo opportunamente i termini n;k possiamo aumentare il dettaglio dell’approssimazione di f
in un tratto speci…co dell’intervallo [0; 1].
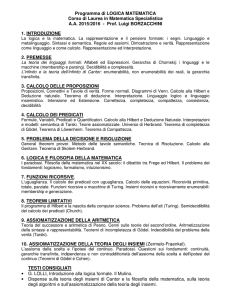
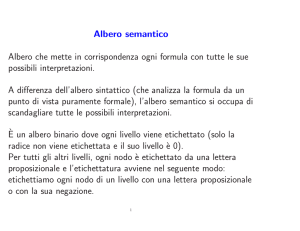
Esempio 5.6 Sia
f (x) =
1 x2 per x 2 [0; 14 ]
log x per x 2 ( 14 ; 1]
Allora il gra…co di f insieme a quello della sua somma parziale
n
fb0 +
3 2X1
X
n=0 k=0
fbn;k
37
n;k
(x)
(che ha in tutto 16 termini) è il seguente:
Si osserva che nel “gradino” di f l’approssimante segue il salto senza problemi;
d’altro canto, l’approssimante è “a gradini” anche nei tratti continui di f .
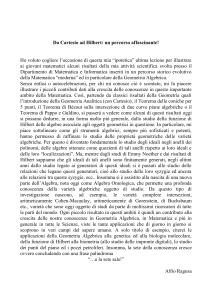
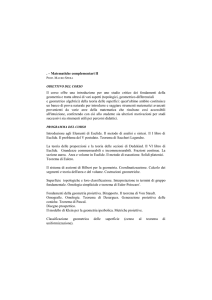
A titolo di confronto il gra…co di f insieme alla sua somma parziale di
Fourier
8
a0 X
+
(ak cos (2 nx) + bk sin (2 nx))
2
n=0
(che ha in tutto 17 termini) è il seguente:
38
Un interessante esempio di problema di compressione delle immagini in cui si
è rivelato utile l’uso di wavelets in due variabili è la digitalizzazione dell’archivio
di impronte digitali compiuto dall’FBI negli anni 1990. Una lettura interessante
in tal senso è il saggio [3].
Riferimenti bibliogra…ci
[1] M. Bramanti, C. D. Pagani, S. Salsa: Analisi Matematica 2. Zanichelli, 2009.
[2] G. Folland: Real Analysis. Modern applications and techniques. Wiley, 1984.
[3] R. Onyshczak, A.Youssef: Fingerprint Image Compression and the Wavelet
Scalar Quantization Speci…cation, Chap. 19 in N. Ratha, R. Bolle, Editors:
Automatic Fingerprint Recognition Systems, Springer 2004.
39