Atti del V Congresso “Metrologia
MMSC10 & Qualità” (Marzo 2007)
MMSC10
Sviluppo e qualificazione di un sistema di
trasmissione dati per misure estensimetriche
E. AGHITO (1), R. CARPINACCI (1), S. MANZONI (2),F. MARTINI (3), R. SALA (2),
M. TAUSEL(3), A. VIGNATI (3), E. ZAPPA (2)
(1)
GRUPPO S.P.A. –VIA G. DI VITTORIO 21, 20090 CALEPPIO DI SETTALA (MI) (ITALY)
SEZIONE DI MISURE E TECNCHE SPERIMENTALI, DIPARTIMENTO DI MECCANICA,
POLITECNICO DI MILANO – E-MAIL: [email protected]
(3)
MICROSYSTEM S.R.L. – VIA E. OLDOFREDI 41, 20124 MILANO (ITALY)
(2)
Introduzione
Al fine di raggiungere e garantire elevati standard produttivi è spesso necessario
completare il processo progettuale svolgendo approfondite campagne di misura, non
soltanto in laboratorio, ma anche nelle condizioni di reale utilizzo in modo da testare il
prodotto in maniera completa. Nelle situazioni in cui le misurazioni debbano essere
svolte su organi rotanti, o comunque su soggetti in movimento, queste prove possono
presentare una realizzazione piuttosto complicata a causa di difficoltà di tipo logistico.
L’aspetto più critico è costituito dal trasferimento dei dati rilevati in corrispondenza
dell’organo in movimento. Lo scopo del presente lavoro è quello di descrivere un nuovo
sistema di acquisizione via radio, capace di garantire un’elevata frequenza di campionamento, per la misura di forze e di mostrare i risultati dei test svolti.
Descrizione del sistema
Il sistema di misura in questione, sviluppato nell’ambito di una collaborazione tra
Microsystem e Politecnico di Milano, è basato su moduli di acquisizione a basso rumore
elettrico per segnali analogici alimentati tramite batterie. Tali moduli vengono posizionati direttamente sull’oggetto da misurare e sono collegati a ponti estensimetrici. In particolare ogni modulo viene interfacciato a quattro mezzi ponti di Wheatstone [1, 2] opportunamente posizionati per la misura (la scelta della configurazione a mezzo ponte
dipende dal fatto che costituisce il più semplice schema di collegamento con compensazione termica). A grandi linee è possibile affermare che ogni modulo, dopo aver acquisito i segnali provenienti dai mezzi ponti estensimetrici, esegue una serie di elaborazioni
sugli stessi e, successivamente, invia i dati ad un’unità centrale di raccolta sfruttando il
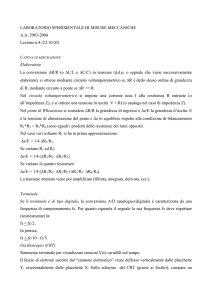
protocollo di comunicazione radio denominato BlueTooth (Figura 1). La citata unita
centrale è composta da una scheda di comunicazione multiseriale RS232 inserita in un
PC dotato del software di acquisizione, più altrettanti convertitori radio. Una volta che i
dati sono stati ricevuti dal PC centrale, questo stesso provvede a sincronizzare i segnali
giunti dai diversi moduli di acquisizione.
I moduli di acquisizione sono i componenti base del sistema dato che rappresentano
il collegamento tra i mezzi ponti di Wheatstone e l’unità centrale garantendo, inoltre, la
Sviluppo e qualificazione di un sistema di trasmissione dati per misure
estensimetriche
digitalizzazione dei segnali. I segnali provenienti dai mezzi ponti estensimetrici passano
prima attraverso un filtro anti-aliasing ed uno stadio di amplificazione e, successivamente, giungono al convertitore A/D. La scelta di questo ultimo componente è stata uno
dei punti chiave dell’intera progettazione: non è stato possibile utilizzare i convertitori
Sigma-Delta a causa del valore della frequenza di campionamento richiesta (6 kHz) unito al numero di ricampionamenti necessari alla pulitura del segnale. Si è dovuto, quindi,
ricorrere a convertitori SAR, normalmente caratterizzati da media velocità (qualche centinaio di kS/s) e da una media risoluzione (fino a 12 bit). In particolare il convertitore
SAR scelto è un multicanale (multiplexato) ad alta velocità (fino a 100 kS/s). Dato che
il fondo scala è di 2.43 V allora la risoluzione in tensione del convertitore a 12 bit risulta
essere pari a 0.59 mV. Gli ultimi componenti da citare sono i pre-amplificatori ed i filtri
anti-aliasing; i primi sono posizionati dopo i mezzi ponti estensimetrici, necessari poiché, come ben noto, i segnali provenienti direttamente dai mezzi ponti sono caratterizzati da un segnale in tensione di ampiezza modesta. Il filtro anti-aliasing di ciascun canale
è costituito da due filtri analogici del primo ordine di tipo RC [3]: uno a monte ed uno a
valle dell’amplificatore. Dato che tali filtri sono del primo ordine risultano poco severi
in termini di attenuazione del segnale oltre la frequenza di taglio e, quindi, la frequenza
di campionamento deve essere decisamente maggiore di tale frequenza di taglio dei filtri
al fine di evitare fenomeni di aliasing. Dopo il convertitore A/D, sono presenti quattro
filtri digitali (uno per ogni canale) la cui funzione è quella di ripulire il segnale dal rumore presente nelle bande di frequenza diverse da quella di interesse. Ognuno di tali
filtri è un filtro IIR [4] Butterworth passa basso con frequenza di taglio regolabile
dall’utente (tale frequenza di taglio deve, comunque, soddisfare il vincolo di essere un
sottomultiplo della frequenza di campionamento).
Una volta che i segnali sono
stati oggetto di questa fase di
filtraggio digitale, essi vengono poi indirizzati ad un
secondo campionatore che
provvede a trasmettere una
certa quantità di dati
all’unità centrale attraverso
un canale radio BlueTooth.
La quantità di campioni
Figura 1: Schema a blocchi dell’intero sistema
inviati ogni secondo dipende
dalla banda passante massima del canale e dall’overhead dato dal protocollo. Ad oggi ogni modulo di acquisizione è in grado di inviare 300 campioni al secondo per ogni canale (1200 S/s considerando tutti i canali) ma si potrebbe migliorare tale prestazione ottimizzando il protocollo
o la funzione di compressione.. L’unità centrale è composta da una scheda multiseriale PCI e da cinque convertitori RS232-Blue Tooth. Sebbene l’unità sia in grado di comunicare con i moduli di acquisizione anche a distanze superiori a 100 m, è opportuno
che tale distanza venga limitata il più possibile. La ragione di ciò sta nel fatto che in
ambienti sfavorevoli la massima distanza a cui la comunicazione può efficacemente avvenire decresce. Un esempio di tali ambienti può essere quello industriale e quello delle
misure sui veicoli: l’ambiente ferromagnetico in cui il sistema dovrebbe lavorare consiglia, in questi casi, di ridurre la distanza tra moduli di acquisizione ed unità centrale.
MMSC10
La soluzione attualmente implementata, che prevede la gestione di un elevato numero di canali estensimetrici per mezzo di più moduli di acquisizione indipendenti ma controllati da un unico software sull’unità centrale, potrebbe eventualmente essere sostituita
da un’unità globale che meglio li integri; in tal modo però l’espandibilità del sistema
verrebbe pesantemente limitata. L’unità centrale è dotata di due caratteristiche cruciali
per il funzionamento dell’intero sistema. La prima è la possibilità di cambiare la frequenza di comunicazione (frequency hopping) tra i suoi convertitori ed i moduli di acquisizione (normalmente 2.4 GHz) nel caso di presenza di fonti di disturbo e/o di altre
sorgenti radio posizionate sulla stessa frequenza. La seconda caratteristica è, invece, la
possibilità di guidare la fase di stand-by dei moduli di acquisizione in modo tale da poterli spegnere, e quindi preservare l’energia delle batterie, nei periodi in cui non debba
essere eseguita un’acquisizione dati. Va inoltre ricordato che il PC su cui è installata la
scheda di ricezione dei segnali provenienti dai vari moduli è provvisto di un software di
acquisizione, sviluppato per gestire l’intero sistema, che permette, tra le altre cose, di
salvare i dati in formato ASCII. Ciò significa che le successive elaborazioni dei segnali
possono essere facilmente affrontate con i più comuni software di calcolo numerico ed
analisi dei segnali.
Prova del sistema
Dal momento che il sistema di misura verrà utilizzato per rilevare le deformazioni di
organi meccanici sottoposti a vibrazioni o su alberi rotanti, si rende necessaria una fase
di test preliminare in laboratorio al fine di verificare la corretta funzionalità anche in tali
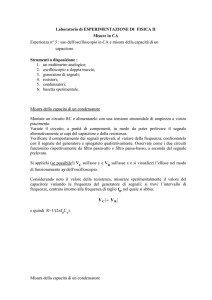
condizioni operative. Al fine di riprodurre una condizione di lavoro particolarmente
gravosa si è realizzato un sistema di prova, mostrato in Figura 2, costituito da un albero
rotante sul quale installare degli estensimetri e un modulo di acquisizione; l’albero è
messo in rotazione da un motore elettrico controllato da un inverter ed è caricato in corrispondenza dell’estremo libero per mezzo di masse.
Per poter utilizzare tali masse durante la rotazione dell’albero, cercando di minimizzare i problemi di vibrazioni dovute all’eccentricità delle masse stesse, è stata adoperata
una carrucola. In Figura 2 è anche mostrata la disposizione degli estensimetri. Poiché
l’obiettivo era quello di ricavare la forza di taglio agente sulla sezione dell’albero, gli
estensimetri sono stati organizzati in quattro mezzi ponti di Wheatstone (il che ha richiesto l’utilizzo di un solo modulo di acquisizione) in modo tale da poter ricavare, una
volta nota la distanza tra le due sezioni in cui sono stati posizionati gli estensimetri,
l’andamento del taglio su due piani tra loro ortogonali (piano 1 e piano 2 di Figura 2).
Un commento merita il fatto di avere utilizzato carichi piuttosto ridotti. Tale scelta è
stata motivata dalla volontà di provare il sistema di misura nelle condizioni più critiche
possibili, avendo cioè un rapporto segnale/rumore molto basso.
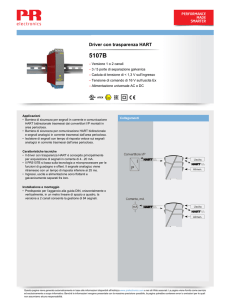
La Figure 3 mostra i segnali (ed i relativi spettri) ottenuti nel seguente modo:
segnale (piano 1) = segnale (piano 1, sezione B) – segnale (piano 1, sezione A)
segnale (piano 2) = segnale (piano 2, sezione B) – segnale (piano 2, sezione A)
Tali segnali sono legati, tramite una costante, al valore della forza di taglio.
Sviluppo e qualificazione di un sistema di trasmissione dati per misure
estensimetriche
Le prove descritte hanno quindi evidenziato il corretto funzionamento del sistema ed
il fatto che, anche in condizioni di rapporto segnale/rumore molto sfavorevoli,
l’accuratezza della misura finale risulta soddisfacente.
Figura 2: Configurazione di prova
Figura 3: Segnale del taglio (sinistra) e relativo modulo dello spettro (destra) per una prova con
carico di 0.9 kg
Bibliografia
[1] E.O. Doebelin, “Strumenti e metodi di misura”, McGraw-Hill, Milano, 2004.
[2] A. Bray, G. Barbato, R. Levi, “Theory and practice of force measurements”,
Academic Press, 1990.
[3] A. Gandelli, M. Lazzaroni, “Elementi di elettronica applicata”, Masson, Milano,
1993.
[4] S. Elliott, “Signal processing for active control”, Academic Press, 2001.