Università degli Studi di Roma “La Sapienza”
Facoltà di Ingegneria
PROGETTO DI SISTEMI
AMPLIFICATORE VALVOLARE PER BASSO
Stefano Andreozzi - Gabriele Buzzi - Paolo Di Marco
C. d. L. Ingegneria Automatica - Anno Accademico 2004/05
a Gianfranco Marziano
2
Indice
Introduzione
5
1 Preamplificatore
6
1.1 Polarizzazione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6
1.2 Stadi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6
1.3 Analisi della configurazione tensione parallelo . . . . . . . . . . . . .
7
1.4 Blocco base . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8
1.5 Amplificazione del differenziale
9
. . . . . . . . . . . . . . . . . . . . .
1.6 Amplificazione del catodo comune . . . . . . . . . . . . . . . . . . . . 10
1.7 Guadagno complessivo del blocco . . . . . . . . . . . . . . . . . . . . 12
1.8 Modello a catena aperta . . . . . . . . . . . . . . . . . . . . . . . . . 12
1.8.1
Calcolo dei poli dominanti . . . . . . . . . . . . . . . . . . . . 13
1.8.2
Modello in bassa frequenza . . . . . . . . . . . . . . . . . . . . 14
1.8.3
Modello in alta frequenza . . . . . . . . . . . . . . . . . . . . 16
1.9 Modello a catena chiusa . . . . . . . . . . . . . . . . . . . . . . . . . 19
1.10 Considerazioni e conclusioni . . . . . . . . . . . . . . . . . . . . . . . 21
2 Equalizzatore
23
2.1 Introduzione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
2.2 Bassi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
2.3 Medi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
2.4 Acuti . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
2.5 Considerazioni . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
3
3 Stadio finale
33
3.1 Introduzione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
3.2 Progetto dello stadio di potenza . . . . . . . . . . . . . . . . . . . . . 34
3.3 Trasformatore di uscita . . . . . . . . . . . . . . . . . . . . . . . . . . 36
3.3.1
Spiegazione . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
3.4 Polarizzazione . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
3.5 Analisi della configurazione tensione serie . . . . . . . . . . . . . . . . 39
3.6 Parametri della valvola d’ingresso . . . . . . . . . . . . . . . . . . . . 40
3.7 Amplificazione dello stadio d’ingresso . . . . . . . . . . . . . . . . . . 41
3.8 Parametri dello stadio differenziale . . . . . . . . . . . . . . . . . . . 41
3.9 Amplificazione del differenziale
. . . . . . . . . . . . . . . . . . . . . 42
3.10 Parametri dello stadio di potenza . . . . . . . . . . . . . . . . . . . . 43
3.11 Amplificazione dello stadio di potenza . . . . . . . . . . . . . . . . . . 43
3.12 Amplificazione totale . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
3.13 Analisi in frequenza dello stadio d’ingresso e invertitore . . . . . . . . 44
3.14 Analisi in frequenza dello stadio differenziale . . . . . . . . . . . . . . 46
3.15 Analisi in frequenza dello stadio di potenza . . . . . . . . . . . . . . . 47
3.16 Funzione di trasferimento dello stadio finale . . . . . . . . . . . . . . 47
3.16.1 Funzione di trasferimento dello stadio non controreazionato . . 47
3.16.2 Funzione di trasferimento dello stadio controreazionato . . . . 48
3.17 Stabilità . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
Conclusioni
50
Schemi
53
4
Introduzione
L’obiettivo è progettare, simulare e realizzare un amplificatore per chitarra basso
con una rete equalizzatrice a tre bande e il finale in push-pull.
Questo amplificatore è sostanzialmente indicato per l’utilizzo casalingo, data la bassa
potenza in uscita (10 WRMS ).
Il preamplificatore deve essere caratterizzato da un guadagno massimo in tensione di
20 dB. Questo è ottenuto mediante una rete che effettua una controreazione di tipo
tensione-parallelo. Questa tecnica è utilizzata nelle configurazioni degli amplificatori
operazionali ed è stata trasferita nel progetto.
Lo stesso tipo di controreazione è stato adottato anche nello stadio equalizzatore per
evitare, mediante l’utilizzo di una rete attiva, problemi di alta attenuazione (attorno
al range 10 ÷ 20 dB) che si verificano invece nelle reti passive. Inoltre questa scelta
determina anche un sensibile miglioramento del SNR e una contestuale diminuzione
della distorsione. La rete fornisce ±12 dB per ognuna delle tre bande di tono.
Lo stadio finale è realizzato mediante due pentodi 6V6 GT collegati in push-pull.
GAIN
RETE DEI TONI
altoparlante
BLOCCO BASE
BLOCCO BASE
STADIO FINALE
(PREAMPLI)
(EQUALIZZ.)
PUSH−PULL
Figura 1: Schema a blocchi del progetto.
5
TRASFORMAT.
Capitolo 1
Preamplificatore
1.1
Polarizzazione
Nella polarizzazione dello stadio preamplificatore e del successivo stadio equalizzatore è stato scelto lo stesso punto di lavoro per tutte le valvole (figura 1.1). Tale
stato di polarizzazione è tipico degli amplificatori Fender, ed è ottenuto utilizzando
una resistenza sull’anodo pari a 100kΩ e una resistenza sul catodo pari a 1, 5kΩ. In
questo modo si ottiene una corrente anodica di 1 mA, una tensione di griglia di 1,5
V, un livello di amplificazione elevato e una bassa distorsione, necessari per la realizzazione dello stadio in oggetto e del successivo, con utilizzo della controreazione
tensione-parallelo. Nelle simulazioni con LTSpice, la polarizzazione così effettuata
mostra dei buoni risultati.
1.2
Stadi
Il nocciolo del preamplificatore e dell’equalizzatore è un blocco che emula il comportamento dell’operazionale e che d’ora in poi verrà chiamato blocco base. Quest’ultimo è costituito da tre stadi: un differenziale, un catodo comune e un inseguitore
catodico. Su ogni singolo blocco è applicata la controreazione tensione-parallelo
(come in un operazionale in configurazione invertente).
6
Figura 1.1: Polarizzazione delle valvole del preamplificatore.
1.3
Analisi della configurazione tensione parallelo
Figura 1.2: Configurazione della controreazione tensione parallelo.
L’amplificazione con reazione tensione-parallelo ha come struttura tipica quella
di figura 1.2. La resistenza di reazione Rf collega ingresso e uscita di una rete amplificatrice invertente. L’inversione di fase fa sì che la reazione sia sicuramente negativa
alle medie frequenze; infatti, con segnale vs positivo, la corrente che percorre Rf è
7
tale da sottrarsi a quella erogata dalla sorgente. Quest’ultima, al fine di riportarsi
alla schematizzazione di figura 1.3, viene trasformata in sorgente reale di corrente.
Figura 1.3: Analisi reazione tensione-parallelo con sorgente reale di corrente.
1.4
Blocco base
Figura 1.4: Amplificatore di figura 1.3 ricondotto alla configurazione ideale di
controreazione tensione parallelo.
L’amplificatore di figura 1.3 può essere ricondotto alla configurazione ideale come
si vede dallo schema di figura 1.4, che tiene conto del carico costituito dal quadripolo
di reazione. Infatti, per ottenere il circuito d’ingresso del blocco base, occorre porre
v0 = 0 dell’amplificatore reazionato; si vede allora che Rf è in parallelo ad Rs . Per il
circuito d’uscita del blocco base occorre porre vi = 0; Rf diventa allora in parallelo
alla resistenza RL . Anche in questo caso, per correttezza d’analisi, si include Rs
nel blocco base, per il quale la funzione di trasferimento da considerare è ora la
8
transresistenza AR =
vo
.
ii
Il fattore di reazione è espresso invece come:
β=
if
1
=−
vo
Rf
Essendo AR negativa, a causa dell’inversione di fase, il prodotto βAR è positivo.
1.5
Amplificazione del differenziale
Figura 1.5: Coppia differenziale.
Per il calcolo dell’amplificazione in banda passante dello stadio differenziale di
figura 1.5 si adotta il modello per piccoli segnali mostrato in figura 1.6.
Figura 1.6: Modello per piccoli segnali della coppia differenziale.
Il segnale differenziale si ripartisce in egual modo su entrambe le griglie, ma con
9
segno opposto. Il catodo per il segnale è da considerarsi a massa.
Il modello per piccoli segnali, con riferimento all’uscita, è un catodo comune con la
tensione di segnale in ingresso dimezzata e cambiata di segno. L’amplificazione vale
quindi:
Adif f =
µRp
2(ra + Rp )
dove µ è il fattore d’amplificazione della valvola e ra è la resistenza anodica.
I valori sono: Rp = R3 //R8 = 75kΩ, ra ' 60kΩ, µ = 100. Si ha quindi Adif f '
27, 78, con Adif f,dB ' 28, 87dB.
1.6
Amplificazione del catodo comune
Figura 1.7: Catodo comune.
La resistenza vista in uscita dallo stadio a catodo comune (figura 1.7) è:
Rout = Rg2 + (1 + α)R14
Dove α rappresenta il rapporto della corrente che scorre attraverso la resistenza R14
e la corrente che scorre attraverso R11 .
α=
IR14
IR11
10
Facendo riferimento alla figura 1.8 si trova che la tensione Vgk dello stadio ad anodo
comune è pari a R11 · IR11 .
Figura 1.8: Schema per il calcolo della resistenza d’uscita Rout .
Il contributo di corrente IR11 su R14 è molto minore rispetto a quello offerto dal
generatore controllato gmVgk . Dato il partitore di corrente si ricava IR14 , trascurando
IR11 :
IR14 '
gmR11 ra IR11
R14 + R12 + ra
Vgk = IR11 R11
Perciò α non è altro che:
α=
gmR11 ra
µR11
=
R14 + R12 + ra
R14 + R12 + ra
L’amplificazione in banda passante è:
Ack = −
µ(R9 //Rout )
' −58
ra + R9 //Rout
Ack,dB ' 35, 27dB
Figura 1.9: Modello per piccoli segnali del catodo comune.
11
1.7
Guadagno complessivo del blocco
L’amplificazione in banda base G è data dal prodotto delle amplificazioni dei singoli
stadi costituenti il blocco:
G = Adif f Ack Aca
dove Adif f è l’amplificazione del differenziale, Ack è quella del catodo comune e Aca è
quella dell’anodo comune (inseguitore catodico). L’ultimo stadio, ad anodo comune,
ha l’amplificazione pressoché unitaria. Per questo motivo:
G = Adif f Ack = 27, 78 · (−58) ' −1611
GdB = Adif f,dB + Ack,dB = 28, 87dB + 35, 27dB ' 64dB
1.8
Modello a catena aperta
Per trattare il modello a catena aperta non si possono semplicemente staccare le
impedenze di controreazione. Esse influenzano il guadagno a catena aperta e quindi
vanno considerate, come nel circuito in figura 1.10.
Figura 1.10: Modello a catena aperta.
12
L’amplificazione corrente-tensione a catena aperta è quindi:
Aiv = G(Rs //Rf )
Questo risultato è stato ottenuto nel modo seguente:
• si ricava il circuito equivalente a catena aperta del preamplificatore;
• si applica il teorema di Norton sulla resistenza Rs e il generatore di tensione
Vs : si ha quindi un generatore di corrente equivalente pari a: Is =
• si calcola il guadagno corrente-tensione che è Aiv =
• la corrente Is è a sua volta: Is =
• in definitiva si ha: Aiv =
1.8.1
Vs
;
Rs
Vout
;
Is
Vin
;
Rs //Rf
Vout
(Rs //Rf )
Vin
R R
= G Rss+Rff .
Calcolo dei poli dominanti
Viene trattata l’amplificazione in funzione della frequenza. A tal proposito vengono individuati i poli e gli zeri della funzione di trasferimento complessiva a catena
aperta.
Il guadagno dell’amplificatore può essere espresso in funzione della frequenza complessa s nella forma:
A(s) = Aiv FL (s)FH (s)
dove FL (s) e FH (s) sono funzioni che tengono conto delle variazioni del guadagno
rispettivamente per basse frequenze e per alte frequenze. Per frequenze ω À ωL
la funzione FL (s) tende a 1. In modo analogo, per frequenze ω ¿ ωH la funzione
FH (s) tende a 1. Così, per ωL ¿ ω ¿ ωH si ha:
A(s) ' Aiv
Da ciò segue che il guadagno dell’amplificatore alle basse frequenze può essere
espresso come:
AL (s) = Aiv FL (s)
13
Il guadagno alle alte frequenze è invece:
AH (s) = Aiv FH (s)
L’analisi in frequenza si basa sulla descrizione del comportamento delle reti d’accoppiamento e dei singoli stadi. Ciascuno di essi viene sostituito da un modello
equivalente per piccoli segnali.
Il modello del triodo viene specificato attraverso un file di libreria all’interno dell’ambiente LTSpice; in particolare i parametri salienti sono specificati nel codice
seguente:
.SUBCKT NH12AX7 A G K
XV1 A G K TRIODENH
+PARAMS: LIP= 1.5 LIF= 0.000016 RAF= 0.076498 RAS= 1 CDO=-0.53056
+ RAP= 0.18 ERP= 1.5
+ MU0= 87.302 MUR=-0.013621 EMC= 0.00000111
+ GCO=-0.2 GCF= 0.00001
+ CGA=3.90E-12 CGK=2.40E-12 CAK=7.00E-13
.ENDS
Dal modello del triodo vengono estrapolati anche i valori delle capacità interne
che sono: Cga = 3, 9pF , Cgk = 2, 4pF e Cak = 0, 7pF .
1.8.2
Modello in bassa frequenza
A bassa frequenza bisogna considerare solo le capacità esterne e si vanno ad analizzare le reti fra ogni singolo stadio. Nel caso in esame sono stati calcolati tre poli:
ωL1 , ωL2 , ωL3 .
Polo ωL1
È dato dalla rete in ingresso del differenziale (figura 1.11), costituita dai componenti
C1 ed R1 :
ω L1 =
1
= 10 · 10−3 rad/s
C1 R1
14
FL1 = 1, 6mHz
Figura 1.11: Rete in ingresso del differenziale.
Polo ωL2
Figura 1.12: Rete che accoppia il differenziale al catodo comune.
È dato dalla rete situata tra l’uscita del differenziale e l’ingresso del catodo
comune (figura 1.12):
ω L2 =
ra + R3
ra · C4 (R3 + R8 ) + R3 · R8 · C4
Polo ωL3
Il calcolo di questo polo è analogo al precedente (figura 1.13), ed si basa sulla rete
formata da C6 e le impedenze ad essa connesse:
ω L3 '
1
C6 Rout
15
Dove Rout è la resistenza vista in uscita dal catodo comune (già calcolata nel paragrafo 1.6).
Figura 1.13: Equivalente del polo ωL3 .
Essendo il primo polo ωL1 e il terzo ωL3 distanti più di due ottave rispetto a ωL2 ,
secondo la tecnica del calcolo dei poli dominanti, essi vengono ignorati perché danno
luogo a quella che può definirsi una dinamica secondaria che può essere trascurata.
Tutto lo studio del comportamento alle basse frequenze è stato ricondotto quindi
all’analisi di un modello con un polo e uno zero.
In particolare, il polo della funzione FL (s) è dato da ωL2 , perciò FL (s) assume la
seguente forma:
FL (s) =
1.8.3
s
s + ω L2
Modello in alta frequenza
Nel modello in alta frequenza vengono considerati i modelli equivalenti degli stadi
componenti il blocco base. In questo modo i calcoli vengono notevolmente semplificati.
Amplificatore differenziale
L’amplificatore differenziale in figura 1.5 è pilotato in maniera single-ended. Anche
se non è ovvio, in questo caso la risposta in frequenza è identica al differenziale
pilotato simmetricamente, ed è ricavata come la risposta in frequenza di un catodo
comune.
16
Figura 1.14: Calcolo del polo ωH1 .
Dato il circuito in ingresso, il polo che si incontra (figura 1.14) è pari a:
ωH1 '
1
' 662000rad/s
0 ·A
(R15 //R16 ) · (Cga
dif f + Cgk )
0
dove Cga
= Cga (1 + Adif f ).
Figura 1.15: Calcolo del polo ωH2 .
Per il circuito in uscita l’altro polo (figura 1.15) è:
ωH2 '
(R3 //R8 ) ·
0
(Cak
+
0
Cga
1
· (1 +
1
)
Adif f
00 · (1 + A ))
+ Cga
ck
' 102000rad/s
Coppia catodo comune e anodo comune
La coppia catodo comune e anodo comune viene trattata assieme, perché l’anodo
comune può essere semplificato con una semplice rete passiva (figura 1.18).
Scrivendo l’equazione al nodo del catodo (contrassegnato col la K in figura 1.16) si
ottiene:
Vo = (gm + ygk ) · Vgk · RK
dove RK = R14 //ra = 27, 7kΩ e ygk =
1
R11
+ sCgk .
17
Figura 1.16: Circuito equivalente per il calcolo dei poli della coppia catodo comune
anodo comune.
Per il calcolo dei poli si considera il circuito di figura 1.17. Usando il teorema dell’assorbimento del generatore, si può sostituire il circuito sotto il nodo K con la sua
impedenza equivalente Zeq . Viene trascurata Cak perché è una capacità molto piccola
che non influisce sul comportamento del circuito. Quindi Zeq =
L’impedenza complessiva fra K e massa è ZB 0 =
1
ygk
Vo
ygk ·Vgk
=
(gm+ygk )·RK
.
ygk
+ Zeq .
Figura 1.17: Equivalente per il calcolo dei poli della coppia catodo comune anodo
comune.
Come mostrato in figura 1.18, questa impedenza può essere rappresentata mediante una resistenza RK in serie ad un circuito RC formato da una resistenza
(1 + gmRK )R11 ed, in parallelo, una capacità
Cgk
.
1+gmRK
Quest’ultima, essendo estre-
mamente piccola, può essere trascurata nel calcolo del modello, come la precedente
Cak .
Lo stadio anodo comune è quindi semplificabile, per il calcolo dei poli, con una semplice rete passiva connessa in uscita allo stadio a catodo comune. Ciò semplifica
18
notevolmente i calcoli. Facendo riferimento allo schema in figura 1.18, il polo in alta
frequenza è:
ωH3 =
(Cak + Cga · (1 +
1
)
Ack
1
' 3, 077 · 106 rad/s
+ Cga ) · (ra //R9 //(R11 + R14 //ra ))
Figura 1.18: Passaggio successivo nel calcolo dei poli.
Considerazioni sul modello in alta frequenza
Si può facilmente constatare che i poli ωH1 e ωH3 distano da ωH2 più di due ottave e
quindi possono essere trascurati. Il polo dominante in alta frequenza è dato proprio
da ωH2 . Perciò il modello in alta frequenza FH (s) =
1.9
1
s
ωH
2
+1
.
Modello a catena chiusa
In precedenza è stato calcolato A(s), che rappresenta l’amplificazione correntetensione del blocco base.
A(s) = Aiv ·
s
s
R15 R16
·
=G·
s
(s + ωL2 )( ωH + 1)
R15 + R16 (s + ωL )( ωHs + 1)
2
2
Come descritto nel paragrafo 1.3, la funzione di trasferimento del sistema controreazionato (figura 1.19) è:
Gi (s) =
A(s)
1 + βA(s)
19
dove β, il fattore di controreazione, vale − R115 .
Per ricavare la funzione di trasferimento dell’amplificazione in tensione basta dividere
Gi (s) per R16 .
Si ottiene un abbassamento della amplificazione in tensione, fino ad arrivare a 20
dB alle medie frequenze e, di conseguenza, un allargamento della banda passante.
Ricordando che, alle medie frequenze, |A(s)| ' |Aiv | À 1, si ottiene:
Gi =
Aiv
1
'
1 + Aiv β
β
In tensione si ottiene:
Gv =
Gi
1
R15
'
=−
R16
βR16
R16
Si è pervenuti quindi ad una espressione nella quale il guadagno dipende solo dalle
impedenze che formano la rete di controreazione R15 e R16 .
Per limitare ulteriormente la banda, che è ancora troppo larga, vengono inserite due
capacità (C10 da 200 pF in parallelo a R15 e C11 da 470 nF in serie a R16 .
00
C10 , assieme ad R15 , costituisce un filtro passa-basso con ωH
=
1
C10 R15
= 33, 3 ·
103 rad/s.
C11 , assieme ad R16 , costituisce un filtro passa-alto con ωL00 = C11 R16 = 141, 9rad/s.
La banda passante si estende dai 20 Hz fino ai 5300 Hz, soddisfacendo quanto indicato dalle specifiche (figura 1.19).
Figura 1.19: Risposta in frequenza del preamplificatore controreazionato.
20
1.10
Considerazioni e conclusioni
A
B
+
+
−
A(s)
−A(s)
−1
−
−β
β
Figura 1.20: Schemi a blocchi alternativi per il preamplificatore.
Il preamplificatore è descritto tramite lo schema a blocchi in figura 1.20A. A(s)
è la funzione di trasferimento del blocco base, calcolata nel paragrafo 1.9, mentre β
è il fattore di controreazione. È stata utilizzata però una rappresentazione alternativa a tale schema (figura 1.20B), che consente di ricondurre lo studio alla classica
controreazione negativa, escludendo il blocco -1.
Dal punto di vista della stabilità lo stadio è assimilabile ad un sistema avente la
seguente funzione di trasferimento ad anello aperto:
Fpre (s) =
As
(s + ω1 )(s + ω2 )
Tracciando il diagramma di Nyquist di tale Fpre si vede come il sistema sia sempre
stabile perché la curva non si avvolge attorno al punto -1 (criterio di Nyquist).
La proprietà di stabilità può essere altresì verificata direttamente con l’analisi dei
diagrammi di Bode ricavati in LTSpice, che è più precisa in quanto tiene conto anche
di tutte le dinamiche trascurate. Da questi diagrammi si evince che il margine di
fase effettivo è quasi 50◦ , mentre quello di guadagno è circa 17 dB.
Di seguito vengono riportati i risultati di simulazione della stabilità effettuati con
Matlab (figura 3.19) ed LTSPice (figura 1.22). Con l’aggiunta dei condensatori C11
e C10 si è limitata la banda dell’amplificatore, migliorando la stabilità del sistema.
Si è visto che nel blocco base controreazionato sia il guadagno, sia la banda passante
dipendono esclusivamente dalle resistenze che costituiscono la rete di controreazione.
Per il calcolo dell’equalizzatore, che è formato dallo stesso blocco base, ma con
21
una controreazione più complessa, basta soltanto calcolare il rapporto fra le due
impedenze, senza analizzare i vari stadi in dettaglio.
Root Locus Editor (C)
Open−Loop Bode Editor (C)
1
40
G.M.: Inf
Freq: NaN
35
Stable loop
0.8
Magnitude (dB)
30
0.6
0.4
25
20
15
10
5
0
0
90
−0.2
−0.4
0
Phase (deg)
Imag Axis
0.2
−0.6
−90
−0.8
P.M.: 90.7 deg
Freq: 8.22e+006 rad/sec
−1
−10
−180
−8
−6
−4
Real Axis
−2
0
2
6
x 10
0
10
2
10
4
10
Frequency (rad/sec)
Figura 1.21: Stabilità con Matlab.
Figura 1.22: Stabilità con LTSpice.
22
6
10
8
10
Capitolo 2
Equalizzatore
2.1
Introduzione
Figura 2.1: Rete dei toni.
Nel capitolo 1, si è analizzato il blocco base con le impedenze di controreazione.
Lo scopo del presente capitolo è di analizzare la rete di controreazione che esercita
il controllo dei toni applicata allo stesso blocco base nello stadio di equalizzazione.
Il controllo è suddiviso in toni bassi, medi e acuti (figura 2.1).
L’analisi viene effettuata indipendentemente su ogni singolo controllo, considerando
i potenziometri dei restanti due controlli a metà corsa. Sono state effettuate opportune trasformazioni topologiche da stella a triangolo al fine di ricavare le impedenze
23
equivalenti.
Il calcolo del profilo di equalizzazione per ogni intervallo di toni viene svolto considerando guadagno massimo per il range di frequenze interessate.
2.2
Bassi
Figura 2.2: Rete equivalente per i bassi.
I condensatori C2 , C3 e C4 sono considerati circuiti aperti: la rete diventa quindi
quella di figura 2.2.
Tra l’uscita e l’ingresso sono connesse due impedenze in parallelo. La prima è data
da R5 in serie a Rp2 ed R4 , la seconda, invece, da R7 in serie a Rp3 ed R6 . Queste
due impedenze possono essere trascurate, perché non hanno alcun effetto sulla controreazione.
Viene effettuata una trasformazione da stella a triangolo:
Zs1 = R1
Zs2 = R3
Zs3 =
Rp1
+ R2
C1 Rp1 s + 1
Come si può constatare dalla figura 2.3, si può trascurare Zt3 , per lo stesso criterio
per cui son state trascurate precedentemente le due impedenze in parallelo connesse
24
tra uscita e ingresso.
Zs1 Zs2 + Zs2 Zs3 + Zs1 Zs3
Zs3
Zs1 Zs2 + Zs2 Zs3 + Zs1 Zs3
Zt2 =
Zs1
C1 Rp1 s(R1 (R2 + R3 ) + R2 R3 ) + R1 (R2 + R3 + Rp1 ) + R3 (R2 + Rp1 )
Zt1 =
C1 R2 Rp1 s + R2 + Rp1
C1 Rp1 s(R1 (R2 + R3 ) + R2 R3 ) + R1 (R2 + R3 + Rp1 ) + R3 (R2 + Rp1 )
Zt2 =
R1 (C1 Rp1 s + 1)
Zt1 =
Zt3
Zs1
Zs3
uscita del
blocco base
Vin
Zt1
Zs2
Zt2
ingresso
differenziale
Figura 2.3: Ulteriore semplificazione della rete equivalente per i bassi.
Il guadagno in tensione, in funzione della frequenza, è dato semplicemente dal
rapporto delle impedenze Zt2 e Zt1 :
Avb (s) = −
C1 R2 Rp1 s + R2 + Rp1
R1 (C1 Rp1 s + 1)
Il guadagno alle basse frequenze vale quindi Gb =
R1 +Rp1
.
R1
Si è scelto Rp1 = 100kΩ
ed R1 = 18kΩ, ottenendo così un guadagno di 18 dB. Considerando che la frequenza
del polo è intorno ai 30 Hz e la frequenza di taglio dello stadio preamplificatore è
intorno ai 20 Hz, alle frequenze interessate tale guadagno si riduce realmente a 12
dB. La frequenza del polo è uguale a
1
2πC1 R1
= 35Hz (C1 = 45, 5nF ).
R3 viene scelto in modo che abbia lo stesso valore di R1 = 18kΩ.
25
Bode Diagram
25
Magnitude (dB)
20
15
10
5
Phase (deg)
0
0
−30
−60
0
10
1
10
2
10
3
10
4
10
Frequency (Hz)
Figura 2.4: Simulazione Matlab.
Figura 2.5: Simulazione LTSpice.
2.3
Medi
In questa banda di frequenze C1 viene considerato un cortocircuito, mentre C4 viene considerato un circuito aperto. In questo modo le resistenze R7 , Rp3 ed R6 si
possono trascurare (figura 2.6). La rete composta da R2 , Rp1 ed R1 va trasformata
da stella a triangolo, ottenendo due resistenze da 83kΩ.
Successivamente si deve trasformare da stella a triangolo la rete di controllo dei medi
(figura 2.7).
26
Figura 2.6: Rete equivalente per i medi.
Zs1 = R4
Zs2 =
1
C3 s
Zs3 =
Rp2
+ R5
C2 Rp2 s + 1
Zt1 =
C2 Rp2 s(C3 R4 R5 s + R4 + R5 ) + C3 R4 s(R5 + Rp2 ) + R4 + R5 + Rp2
C3 s(C2 R5 Rp2 s + R5 + Rp2 )
Zt2 =
C2 Rp2 s(C3 R4 R5 s + R4 + R5 ) + C3 R4 s(R5 + Rp2 ) + R4 + R5 + Rp2
C3 R4 s(C2 Rp2 s + 1)
Figura 2.7: Impedenze equivalenti per la rete dei medi.
Zpar1 = 83000//Zt1
Zpar2 = 83000//Zt2
Avm (s) = −
27
Zpar2
=
Zpar1
=−
C2 Rp2 s(C3 R5 s(R4 + 83k) + R4 + R5 ) + C3 s(R4 + 83k)(R5 + Rp2 ) + R4 + R5 + Rp2
C2 Rp2 s(C3 R4 s(R5 + 83k) + R4 + R5 ) + C3 R4 s(R5 + Rp2 + 83k) + R4 + R5 + Rp2
Ponendo R4 = R5 si ottiene:
Avm (s) = −
s2 + s
2C2 R4 Rp2 +C3 R42 +C3 R4 Rp2 +83kC3 R4 +83kC3 Rp2
C2 C3 R42 Rp2 +83kC2 C3 R4 Rp2
s2 + s
2C2 R4 Rp2 +C3 R42 +C3 R4 Rp2 +83kC3 R4
C2 C3 R42 Rp2 +83kC2 C3 R4 Rp2
+
+
2R4 +Rp2
C2 C3 R42 Rp2 +83kC2 C3 R4 Rp2
2R4 +Rp2
C2 C3 R42 Rp2 +83kC2 C3 R4 Rp2
La funzione di trasferimento ha la seguente struttura:
Avm (s) =
s2 + s A0Qω0 + ω02
s2 + s ωQ0 + ω02
Tale funzione ha un andamento a campana nelle frequenze interessate. A0 è il
guadagno alla frequenza di risonanza ω0 , mentre Q è il fattore di merito del filtro:
questi tre parametri vanno calcolati.
La frequenza di risonanza è:
s
2R4 + Rp2
+ 83kC2 C3 R4 Rp2
ω0 =
C2 C3 R42 Rp2
Il fattore di merito del filtro è:
Q=
C2 C3 Rp2 (R4 + 83k)ω0
2C2 Rp2 + C3 (R4 + Rp2 + 83k)
Il guadagno alla risonanza è:
A0 =
2C2 R4 Rp2 + C3 (R42 + R4 (Rp2 + 83k) + 83kRp2 )
R4 (2C2 Rp2 + C3 (R4 + Rp2 + 83k))
Per semplicità vengono fissate le resistenze con valori standard: Rp2 = 100kΩ e
R5 , R4 = 4, 7kΩ.
A questo punto i tre parametri dipendono solo dai valori di C2 e C3 ; si hanno due
gradi di libertà e si possono soddisfare soltanto due delle tre specifiche. I valori
fissati sono ω0 ' 2765rad/s (440Hz) e A0 = 12dB.
s
9, 4k + 100k
' 2765rad/s
ω0 =
C2 C3 (41, 22 · 101 2)
C2 940 · 106 + C3 9, 18219 · 109
A0 =
'4
C2 0, 940 · 109 + C3 0, 88219 · 109
Da queste espressioni si ricava:
C2 = 26, 32nF
C3 = 13, 16nF
28
Bode Diagram
25
Magnitude (dB)
20
15
10
5
0
−5
90
Phase (deg)
45
0
−45
−90
0
10
1
2
10
10
3
10
4
10
5
10
6
10
Frequency (Hz)
Figura 2.8: Simulazione Matlab.
Figura 2.9: Simulazione LTSpice.
2.4
Acuti
C1 , C2 e C3 per questo intervallo di frequenze vengono considerati come cortocircuiti
(figura 2.10); si presentano quindi tre reti a stella che vengono successivamente
trasformate in reti a triangolo.
Come mostrato in figura 2.11, si ricavano quindi due impedenze da 33, 7kΩ.
Viene trasformata in triangolo anche la terza rete a stella, per il controllo degli acuti:
Zs1 = R6
Zt1 =
Zs2 =
1
C4 s
Zs3 = R7 + Rp3
C4 R6 s(R7 + Rp3 ) + R6 + R7 + Rp3
C4 s(R7 + Rp3 )
29
Zt2 =
C4 R6 s(R7 + Rp3 ) + R6 + R7 + Rp3
C4 R6 s
Zpar1 = 33700//Zt1
Ava (s) = −
Zpar2 = 33700//Zt2
Zpar2
C4 s(R7 + 33700)(R7 + Rp3 ) + 2R7 + Rp3
=−
Zpar1
C4 R7 s(R7 + Rp3 + 33700) + 2R7 Rp3
Figura 2.10: Rete equivalente per gli acuti.
Figura 2.11: Impedenze equivalenti per gli acuti.
s+ω
.
La funzione di trasferimento è quindi − Ks+ω
1
K
rappresenta il guadagno alle alte
frequenze:
Ga =
1
(R7 + 33700)(R7 + Rp3 )
=
K
R7 (R7 + Rp3 + 33700)
30
Sono stati scelti come valori per le resistenze Rp3 = 500kΩ, che è un valore standard,
ed R7 = 3, 6kΩ. Per questo motivo G = 9, 7 ' 20dB. Tale guadagno, come per i
bassi, è stato scelto leggermente più alto perché la rete degli acuti è la più influenzata
dal carico delle altre due.
La frequenza di taglio del polo è
2R7 +Rp3
.
2πC4 (R7 +33700)(R7 +Rp3 )
Scegliendo C4 = 8nF si
ottiene una frequenza di taglio pari a 5000 Hz.
Bode Diagram
20
18
16
Magnitude (dB)
14
12
10
8
6
4
2
Phase (deg)
0
60
30
0
1
10
2
10
3
10
4
10
Frequency (Hz)
Figura 2.12: Simulazione Matlab.
Figura 2.13: Simulazione LTSpice.
31
5
10
2.5
Considerazioni
I valori dei componenti che costituiscono la rete per il controllo dei toni, ottenuti
dall’analisi, sono stati sostituiti con altri valori, ottenuti empiricamente al fine di
ottenere le curve di risposta in frequenza che meglio soddisfano le specifiche. I valori
correnti sono quindi riportati nella tabella seguente:
R1
13kΩ
Rp1
100kΩ
R2
13kΩ
Rp2
100kΩ
R3
18kΩ
Rp3
500kΩ
R4
3kΩ
C1
12nF
R5
3kΩ
C2
27, 2nF
R6
3, 6kΩ
C3
20nF
R7
3, 6kΩ
C4
8nF
32
Capitolo 3
Stadio finale
3.1
Introduzione
Il finale utilizza una controreazione di tipo tensione serie ed è costituito da uno stadio
d’ingresso a catodo comune. Ad esso è connesso un invertitore di fase concertina
splitter, seguito da un differenziale bilanciato e una coppia di pentodi finali che,
insieme al trasformatore d’uscita accoppiato all’altoparlante, costituiscono lo stadio
di potenza in push-pull.
I due pentodi sono 6V6 GT sufficienti ad ottenere una potenza di 10Wrms , mentre i
triodi sono del tipo 12AU7.
Figura 3.1: Trasformatore Hammond 1608.
33
3.2
Progetto dello stadio di potenza
Il trasformatore scelto è un Hammond Manifacturig 1608, mostrato in figura 3.1, il
quale rispetta la specifica sulla potenza d’uscita. Un parametro importante, in fase
progettuale, è l’impedenza dell’avvolgimento primario del trasformatore, che è essere
pari a 8 kΩ. Tale valore serve a trovare il punto di lavoro sulle curve dei pentodi,
tracciate mantenendo costanti la tensione di griglia 2 (Vg2 = 285V ) e la tensione di
griglia 3 (Vg3 = 0V ).
Le curve caratteristiche del pentodo (figura 3.2) sono state ricavate dal modello
LTSpice utilizzato.
Figura 3.2: Curve caratteristiche del pentodo.
Ogni valvola sente un quarto dell’impedenza totale del primario del trasformatore,
ovvero dell’impedenza che si trova tra le due placche dei pentodi (2kΩ). Si deve
tracciare una retta di carico dinamica con pendenza pari a −1/2000Ω.
Il punto di lavoro viene dapprima determinato empiricamente a partire dai parametri
consigliati nel data sheet del pentodo (Vg ' −20V , Vgk ' 285V ). Data la tensione
di alimentazione (300V) si individua sul grafico in figura la retta di carico statica che
34
passa per il punto di lavoro e per il punto di coordinate (300V, 0mA) (figura 3.3).
Tale retta ha pendenza mstat = −1/512Ω In seguito, data la pendenza della retta,
si ricava la resistenza da porre sui catodi dei due pentodi, che è pari a −1/2mstat '
260Ω.
Figura 3.3: Retta di carico statica.
Sul punto di lavoro trovato, passa anche la retta di carico dinamica determinata
dall’impedenza del primario del trasformatore: mdin = −1/2000Ω. Questa retta in
origine toccava sul grafico la curva di potenza massima erogabile dei 14W (in figura
3.3); per questo motivo si è scelto di aumentare Vg da -20V a -23V, in modo da
spostare verso il basso il punto di lavoro (figura 3.4).
Per trovare la potenza erogata, si considera la massima corrente supportata che è
115mA, come da data-sheet. Sulla retta di carico dinamica, tale valore di corrente
corrisponde al valore di tensione Vg = 100V . Il punto individuato, assieme al punto
di lavoro, costituiscono l’escursione possibile lungo la retta dinamica.
35
Figura 3.4: Retta di carico dinamica.
La potenza d’uscita del push-pull può essere calcolata applicando la formula generale:
P = Vrms · Irms
definendo: Vpl e Ipl la tensione e la corrente nel punto di lavoro; Vo e Io il valore
della tensione di placca e della corrente di placca quando viene raggiunto il punto
massimo di escursione sulla retta dinamica.
Si utilizzano le equazioni:
√
Vrms = (Vpl − Vo )/ 2 = 135, 8V
√
Irms = (Ipl − Io )/ 2 = 70, 7mA
Perciò la potenza di uscita dell’amplificatore è pari a:
P = Vrms Irms = 9, 6W
3.3
Trasformatore di uscita
Il trasformatore Hammond 1608 ha un’impedenza primaria di 8kΩ e scegliendo un
carico di 8Ω (impedenza dell’altoparlante) affinché il trasformatore possa essere si36
mulato correttamente in LTSpice, il rapporto fra le induttanze del primario e del
secondario deve essere uguale al rapporto tra le impedenze del primario e del secondario.
Scegliendo un’induttanza sul primario di 200 Henry si deve determinare il valore
dell’induttanza del secondario:
r
200
=
Lsec
r
8000
8
Si ottiene Lsec = 0, 2H.
Essendo il primario composto da due avvolgimenti, l’induttanza presente in ogni
avvolgimento è un quarto di quella totale del primario:
Lprim,1 = Lprim,2 =
3.3.1
Lprim
= 200H/4 = 50H
4
Spiegazione
Dato un trasformatore, l’induttanza del primario e del secondario L1 ed L2 sono
definite nel modo seguente:
L1 =
µN12 Aeq
leq
L2 =
µN22 Aeq
leq
dove µ è il coefficiente di permeabilità magnetica, N1 ed N2 sono il numero di spire
del primario e del secondario, Aeq è la sezione equivalente del traferro e leq la sua
lunghezza.
Il flusso magnetico si trova nel modo seguente (in base alla legge di Ohm magnetica
nel caso dei trasformatori ideali):
Φ=
N2 i2
N1 i2
=
Req
Req
dove i2 è la corrente nel trasformatore e Req è la riluttanza del traferro. Si ha:
Φ1 =
µN1 i1 A
µN12 i1 A
L1
N1 i1
=
=
i1 =
l
N1 l
N1
Req
In base a quanto ricavato si può scrivere la seguente eguaglianza, che vale anche per
il secondario:
L1
= R−1
eq
N12
Anche se viene dimezzato il numero di spire del primario, nel caso dei trasformatori
la riluttanza rimane costante; di conseguenza l’induttanza diminuisce di un quarto.
37
3.4
Polarizzazione
Nello stadio finale ogni triodo mostra una retta di carico con pendenza pari a circa
−1/44000Ω. Fra un triodo e l’altro cambia invece il punto di lavoro su tale retta.
Per quanto riguarda la valvola U1 si vuole ottenere un alto guadagno e quindi si è
cercato di spostare il punto di lavoro verso le curve più spaziate fra loro (in figura
3.5, a sinistra). Si è scelto il punto avente Vg = −2V e la corrente di placca pari a
5mA. Per raggiungere -2V sulla griglia è stata scelta una resistenza sul catodo pari
a circa 400Ω.
Figura 3.5: Curve per la polarizzazione dei triodi.
La valvola U2 ha lo stesso punto di lavoro, ma, dovendo svolgere la funzione di invertitore di fase del tipo concertina, non deve fornire amplificazione. Perciò si ha
che le resistenze sull’anodo e sul catodo sono pari a 22kΩ ciascuna.
La coppia U3 ed U4 compone uno stadio differenziale che deve avere un’ampia escursione in uscita, adatta a pilotare i pentodi. Per questo, rispetto alla situazione
precedente, si è spostato il punto di lavoro più a destra nelle curve, in modo da ave38
re ampia dinamica nell’escursione senza troppa distorsione. Questo punto di lavoro
è (Vg = −6, Ip = 3, 5mA). Quindi la resistenza sul catodo di ognuno dovrebbe essere
all’incirca di 2kΩ. Siccome i catodi delle due valvole sono connessi allo stesso nodo,
allora viene scelta un’unica resistenza grande la metà (1kΩ).
3.5
Analisi della configurazione tensione serie
Figura 3.6: Configurazione tensione serie.
Lo schema classico, costituito da due blocchi di amplificazione invertenti disposti
in cascata, è illustrato in figura 3.6. Una frazione della tensione di uscita vo , in fase
con vs , viene riportata in ingresso mediante la rete di reazione formata dal partitore
resistivo Rf , R. La tensione ai capi di R è di fatto inserita nella maglia di ingresso
dell’amplificatore in maniera tale da opporsi a vs , realizzando così una controreazione
di tensione con confronto in serie. La seconda uscita del primo blocco amplificatore,
alla quale è connessa R, deve avere, rispetto all’ingresso, l’amplificazione di tensione
inferiore ad 1, senza inversione di fase. Essa viene normalmente posta sul catodo di
un primo stadio.
L’amplificatore base, privo di reazione, può essere ottenuto come mostrato in figura
3.7. Per disegnare il circuito d’ingresso occorre porre vo = 0 nel circuito reazionato
di figura 3.6. Si vede allora che Rf si pone in parallelo ad R. Per ottenere il circuito
di uscita occorre invece aprire la maglia d’ingresso del circuito reazionato, sicché Rf
risulta in serie ad R. Si arriva così al circuito di figura 3.7, in cui l’amplificatore
base include anche la resistenza della sorgente Rs .
39
Figura 3.7: Configurazione tensione serie.
La determinazione dei parametri funzionali dell’amplificatore reazionato può quindi
essere condotta sulla base di alcune relazioni note, dopo aver ricavato quelli dell’amplificatore base Av, Ri ed Ro ed il fattore di reazione β. Dallo schema si ottiene in
particolare:
Avf =
3.6
v0
AV
=
vs
1 + βA
AV =
v0
vi
β=
vf
R
=
v0
R + Rf
Parametri della valvola d’ingresso
Sono stati ricavati graficamente, a partire dalle curve, i parametri dinamici della
valvola d’ingresso (che è la stessa del concertina):
Ã
!
∆Va
ra =
= 8kΩ
∆Ia
Vg =cost
!
∆Ia
= 2mf
gm =
∆Vg
Va =cost
Ã
!
∆Va
µ=
= 16
∆Vg
Ã
Ia =cost
Le capacità interelettrodiche (prese dal file di libreria della valvola) sono:
Cga = 1, 6pF
Cgk = 1, 8pF
40
Cak = 0, 45pF
3.7
Amplificazione dello stadio d’ingresso
Figura 3.8: Valvola d’ingresso.
Figura 3.9: Equivalente a catodo comune per l’ingresso.
Per lo stadio d’ingresso, R4 può essere trascurata in quanto ha un valore molto
piccolo (68Ω); perciò l’amplificazione Asi è quella del catodo comune (figura 3.9):
Asi = −
3.8
µR2
' −13, 5 ⇒ Asi,dB = 22, 6dB
r a + R2
Parametri dello stadio differenziale
Sono stati ricavati graficamente, a partire dalle curve, i parametri dinamici dello
stadio differenziale:
Ã
ra =
∆Va
∆Ia
!
= 8, 9kΩ
Vg =cost
41
!
∆Ia
= 1, 69mf
gm =
∆Vg
Va =cost
Ã
!
∆Va
µ=
= 15
∆Vg
Ã
Ia =cost
3.9
Amplificazione del differenziale
Figura 3.10: Coppia differenziale che pilota lo stadio di potenza.
Come scritto nei paragrafo 1.8.3 l’amplificatore differenziale (figura 3.10) può essere assimilato ad un catodo comune (figura 3.11). Tenendo presente questa semplificazione e ricordando che l’uscita viene presa in maniera bilanciata, l’amplificazione
Asd vale:
Asd =
µR12 //R14
' 12 ⇒ Asd,dB = 21, 6dB
ra + R12 //R14
Figura 3.11: Equivalente del differenziale.
42
3.10
Parametri dello stadio di potenza
Figura 3.12: Push-pull.
In questo stadio (figura 3.12) ra viene trascurata perché ha un valore elevato. È
stato calcolato solo gm, che vale 3, 4mf.
Le capacità d’ingresso e d’uscita, prese dal data sheet, sono, rispettivamente, 9 pF
e 7,5 pF.
3.11
Amplificazione dello stadio di potenza
Figura 3.13: Equivalente del push-pull.
Anche questo stadio è considerato simile ad un catodo comune (figura 3.13).
quindi:
Asp = −gm
Rprim
= −6, 8 ⇒ Asp,dB = 16, 7dB
4
dove Rprim è l’impedenza vista dal primario, che vale 8kΩ.
43
3.12
Amplificazione totale
In base a quanto riportato nei paragrafi precedenti, l’amplificazione totale Af in vale:
Af in = Asi Asd Asp n ' 70
dove n è il rapporto di trasformazione di un singolo avvolgimento primario del
q
8
= 63, 3 · 10−3 .
trasformatore, e vale 2000
3.13
Analisi in frequenza dello stadio d’ingresso e
invertitore
Figura 3.14: Gruppo RC in ingresso.
Il gruppo RC in ingresso (figura 3.14) costituisce una rete passa alto con:
ωL1 = 1/(C1 R1 ) = 16, 67rad/s
che corrisponde ad una frequenza di taglio di 2,65 Hz. Le capacità interelettrodiche
limitano la risposta alle alte frequenze e il gruppo costituito dalla valvola d’ingresso
e l’invertitore di fase può essere analizzato come descritto nel paragrafo 1.16. Infatti
l’invertitore può essere considerato come una configurazione a anodo comune.
ωH1 =
1
(Cak + (1 + Asi )Cga + Cga ) · (ra //R2 //(R5 + R8 //ra))
Comunque per limitare la risposta alle alte frequenze è stato inserito in parallelo
alla resistenza R2 un capacità C2 da 10 nF (figura 3.15):
ωH2 =
1
C2 (R2 //ra)
44
Figura 3.15: Circuito d’ingresso.
È facile verificare come ωH2 ¿ ωH1 perciò ωH2 costituisce il polo in alta frequenza
dello stadio d’ingresso. L’invertitore è connesso a sua volta allo stadio precedente
con una rete RC passa alto costituita dal condensatore C3 e dalle varie impedenze
ad esso connesse. Secondo la regola della riflessione della resistenza, in serie a R5
c’è una resistenza che vale R8 (α + 1), dove α rappresenta il rapporto tra IR8 e IR5 :
α=
gmR5 ra
IR8
=
IR5
R6 + R8 + ra
Di conseguenza su C3 si ha un’impedenza Rout = R5 + (1 + α)R8 = 6, 5M Ω.
Figura 3.16: Circuito equivalente per il calcolo di ωL2 .
45
La rete passa basso così ottenuta (figura 3.16) ha il punto di rottura pari all’incirca
a:
ωL2 = 1/(C3 Rout ) = 15, 4rad/s
Si arriva ad ottenere quindi la seguente funzione di trasferimento:
Asi (s) =
3.14
( ωHs
2
Asi s2
+ 1)(s + ωL1 )(s + ωL2 )
Analisi in frequenza dello stadio differenziale
A centro banda il guadagno di questo stadio è pari a Asd = 12. Vengono trascurate
sia le impedenze interne della valvola, sia le resistenze R6 ed R8 , in quanto sono più
piccole di R9 .
ωL3 ' 1/(C6 R9 ) = 1rad/s
Figura 3.17: Circuito equivalente per il calcolo di ωH3 .
Il polo alle alte frequenze è determinato dalla capacità C10 , che è molto più grande
delle capacità interelelettrodiche, intervenendo a frequenze più basse (figura 3.17).
Il punto di rottura è perciò:
ωH3 = 1/(C10 (ra //R12 //R14 )) = 15200rad/s
La funzione di trasferimento per lo stadio differenziale è:
Asd (s) =
s
( ωH
3
Asd s
+ 1)(s + ωL3 )
46
3.15
Analisi in frequenza dello stadio di potenza
Figura 3.18: Circuito equivalente per il calcolo di ωL4 .
In questo stadio il guadagno di centro banda è Asp = −6, 8 e la frequenza di
taglio calcolata rappresenta l’ultimo polo da ricercare (figura 3.18):
ωL4 ' 1/(C8 (R14 + ra //R12 )) = 1, 77rad/s
Si può trascurare l’ultimo polo in alta frequenza perché è lontano rispetto agli altri
(circa 10 MHz).
La funzione di trasferimento è data dall’unico polo effettivamente calcolato, ωL4 :
Asp (s) =
3.16
3.16.1
Asp s
s + ω L4
Funzione di trasferimento dello stadio finale
Funzione di trasferimento dello stadio non controreazionato
Come nel caso del preamplificatore, la funzione di trasferimento dell’intero stadio è
data dal prodotto delle funzioni di trasferimento ricavate in precedenza:
Fsf (s) = Asi (s) · Asd (s) · Asp (s) =
=
( ωHs
2
Af in s4
=
+ 1)(s + ωL1 )(s + ωL2 )( ωHs + 1)(s + ωL3 )(s + ωL4 )
3
4
=
s
( 14706
70s
s
+ 1)(s + 16, 67)(s + 15, 4)( 15200
+ 1)(s + 1)(s + 1, 77)
47
3.16.2
Funzione di trasferimento dello stadio controreazionato
Nello stadio in esame la controreazione è effettuata mediante la coppia R4 , R19 .
Nell’anello di controreazione è stata inserita inoltre, in maniera empirica, la capacità
C12 , per limitare il guadagno alle alte frequenze.
Il fattore di controreazione vale:
β=
R4
= 86, 29 · 10−3
R4 + R19
La funzione di trasferimento controreazionata è pari a:
Fsf c (s) =
=
Fsf (s)
=
1 + Fsf (s)β
0, 154s4
9, 8 · 10−12 s6 + 2, 9 · 10−7 s5 + 0, 0155s4 + 0, 077s3 + 0, 765s2 + 1, 69s + 1
Tramite la simulazione in LTSpice si nota che l’inserimento di C12 determina il
livellamento di un picco di risonanza rilevante, che si avrebbe attorno ai 7 kHz.
3.17
Stabilità
Si noti che in questo caso lo schema a blocchi corrisponde già allo schema classico
di controreazione negativa, e quindi non deve subire alcun adattamento. Per questo
stadio dell’amplificatore è utile soffermarsi sullo studio della stabilità in quanto in
questo caso non è scontata, come per gli altri stadi.
La funzione di trasferimento dello stadio finale a catena aperta è:
Ff in =
70s4
4, 47 · 10−9 s6 + 0, 0001s5 + s4 + 34, 89s3 + 347, 4s2 + 767, 9s + 454, 4
Il fattore di controreazione β in questo caso vale:
β=
Rs
68
=
= 0, 0863
Rs + Rf
68 + 720
Simulando la controreazione nel SISOtool di Matlab (figura 3.19) si ottengono i
seguenti parametri:
mφ = −27, 7◦
mG = 7, 2dB
48
La proprietà di stabilità può essere verificata anche con l’analisi dei diagrammi di
Bode ricavati in LTSpice (figura 3.20), che tiene conto anche di tutte le dinamiche trascurate. Da questi diagrammi si vede che il margine di fase effettivo è 28◦ ,
mentre quello di guadagno è circa 10 dB. In questo caso l’analisi fatta col modello approssimato è più verosimile rispetto a quella condotta nel caso del preamplificatore.
4
Root Locus Editor (C)
x 10
Open−Loop Bode Editor (C)
4
50
G.M.: 7.2 dB
Freq: 4.69 rad/sec
Stable loop
0
Magnitude (dB)
3
2
−50
−100
1
0
−200
360
−1
Phase (deg)
Imag Axis
−150
−2
180
0
−3
−4
−20000
−15000
−10000
−5000
Real Axis
0
P.M.: −27.7 deg
Freq: 7.3 rad/sec
−180
−2
0
5000 10
10
2
10
Frequency (rad/sec)
Figura 3.19: Simulazione Matlab.
Figura 3.20: Simulazione LTSpice.
49
4
10
6
10
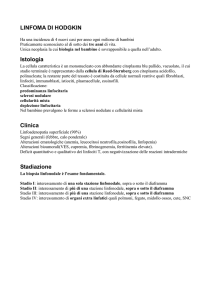
Conclusioni
Vengono presentati i risultati di simulazione in frequenza dell’intero sistema e viene
calcolato l’indice di distorsione armonica.
La simulazione è stata svolta con gain e volume al massimo, i toni a flat, utilizzando
una sinusoide a 440 Hz di ampiezza 1 VRM S . Dalla simulazione si sono ottenute quattro armoniche rilevanti di ordine dispari (dalla terza alla nona) ed un THD=3,4%
(figure 3.21 e 3.22).
Figura 3.21: Segnale in uscita dall’amplificatore.
50
Figura 3.22: FFT del segnale in uscita all’amplificatore che mostra l’arricchimento
armonico.
Rispetto al progetto originale, nel preamplificatore è stata inserita una resistenza
da 470kΩ sull’anodo di una valvola del differenziale (figura 3.23) per ottenere un
migliore bilanciamento. In questo modo sui due anodi si presenta lo stesso carico.
Figura 3.23: Resistenza aggiunta per bilanciare il differenziale del preamplificatore.
Nel realizzare il progetto è stato di rilevante importanza il supporto software nel
disegno, nella simulazione e nel calcolo simbolico. Per il disegno e la simulazione del
51
circuito è stato utilizzato l’LTSpice; la funzione di trasferimento della rete equalizzatrice è stata ricavata col Derive 6 e per la scelta dei componenti a partire dalla
funzione di trasferimento è stato impiegato il Matlab 6.5.
Finito di comporre con LATEX, il giorno 29 agosto 2005.
52
Preamplificatore ed equalizzatore
53
Rete di controllo dei toni
54
Stadio finale
55
Bibliografia
[1]
Giuseppe Biondo, Enrico Sacchi, Manuale di elettronica e telecomunicazioni,
Hoepli, 1996
[2]
Adel S. Sedra, Kenneth C. Smith, Circuiti per la microelettronica, Ingegneria
2000, 1996
[3]
Elisabetta Cuniberti, Luciano De Lucchi, Elettronica analogica, Petrini
Editore, 2000
[4]
Brad Bryant, The design of an audio frequency vacuum tube amplifier, Wright
State University, 2000
[5]
Kevin O’Connor, The Ultimate Tone, vol.3, Power Press, 2002
[6]
Elisabetta Cuniberti, Luciano De Lucchi, Tecnologia, disegno e progettazione,
Petrini Editore, 1994
56