Capitolo I - Teoria di base sugli oscillatori")
CAPITOLO I – Teoria di base sugli oscillatori
In questo capitolo spiegheremo cos’è e a cosa serve un oscillatore.
Partiremo dalla definizione di oscillatore ideale e poi passeremo a quello reale
spiegando quali sono gli effetti di disturbo che entrano in gioco nella pratica.
Infine sceglieremo un modello e ne studieremo il rumore di fase.
Come è già stato detto nell’introduzione, il rumore di fase è una figura di
merito importante per garantire che l’oscillatore sia adatto a funzionare come
LO in particolari applicazioni.
La teoria del rumore di fase è un argomento che negli ultimi anni sta
interessando particolarmente i ricercatori di tutto il mondo; la ragione di tale
accanimento sta nel fatto che la teoria lineare tempo invariante, specialmente
negli ultimi cinquanta anni, non si trova in perfetto accordo con i risultati
ottenuti sperimentalmente dagli oscillatori realizzati. Quindi per aiutare i
progettisti, sono stati introdotti dei fattori di correzione per aggiustare la teoria
lineare a di conseguenza correggere le misure.
Lo scopo di questo capitolo perciò sarà principalmente quello di esporre
nel modo più chiaro possibile i concetti base della teoria del rumore di fase
degli oscillatori, che ci sarà di grande aiuto nei capitoli successivi quando
andremo a progettare il nostro oscillatore.
CAPITOLO I – Teoria di base sugli oscillatori
1.1 – Gli oscillatori
Gli oscillatori sono circuiti in grado di produrre un’oscillazione stabile, sia
nello spettro che nell’ampiezza. Essi vengono utilizzati come sorgenti di clock
per le varie temporizzazioni del sistema. Esistono vari tipi di oscillatori che
differiscono tra loro per la modalità di funzionamento, per il campo operativo e
per la stabilità. Volendo fare una prima classificazione possiamo distinguere:
• oscillatori LC (serie – parallelo - al quarzo)
• oscillatori ad anello
• oscillatori a sfasamento
• oscillatori a rilassamento
di solito, nell’ambito delle radiofrequenze, si usano quelli del primo tipo.
Gli oscillatori inoltre sono sistemi non lineari e perciò non potrebbero
essere visti come sistemi a poli e zeri. Però nonostante tutto, volendoci
semplificare la vita, possiamo vederli come sistemi a due poli immaginari. Nel
caso in cui ci sia solo una coppia di poli, l’oscillatore verrà detto
“sinusoidale”, altrimenti sarà detto “armonico”.
13
CAPITOLO I – Teoria di base sugli oscillatori
1.2 – Oscillatori LC
Gli oscillatori LC non sono altro che dei circuiti basati su risonatori LC
parallelo (o serie) che, idealmente, si comportano da oscillatori al seguito di
un’eccitazione istantanea.
L
C
Fig. 1.1 – Risonatore Ideale
La frequenza di oscillazione ω0 di questi dispositivi si può ricavare dal criterio
di Barkhausen, che sarà spiegato nel paragrafo successivo.
ω
0
=
1
LC
(1.1)
Naturalmente nella realtà non esistono condensatori e capacitori privi di
perdite, e perciò tale risonatore non oscillerà come abbiamo previsto, ma darà
luogo ad un’oscillazione smorzata.
Perciò quando passiamo al caso reale, condensatori e induttori devono essere
modellizzati tenendo conto di una resistenza di perdita (Fig. 1.2) che varia con
la frequenza. Vediamo sotto i modelli reali:
14
CAPITOLO I – Teoria di base sugli oscillatori
Lreale
Creale
RLS
Cideale
RCP
Lideale
Fig. 1.2a - Modello di un induttore reale
Fig. 1.2b - Modello di un condensatore reale
Alle basse frequenze tali resistenze di perdita si possono considerare pressoché
costanti. Alle alte frequenze invece, si presentano fenomeni non poco
trascurabili quali l’effetto pelle, le resistenze tenderanno a crescere con la
frequenza stessa. Per questi motivi, nell’ambito RF si preferisce parlare di Q
associato all’induttore o al condensatore, piuttosto che di resistenza.
Ad esempio, per l’induttore si ha:
QL = ω ⋅
L
R LS
(1.2)
all’aumentare di ω si ha un aumento di RLS quindi il valore di Q, in un range di
frequenze, si mantiene costante. Contrariamente a quanto potrebbe apparire
dall’equazione 1.2, un aumento di L comporta una diminuzione del Q, a causa
di un conseguente aumento di RLS.
Anche i condensatori sono classificati in base al Q (in genere molto
maggiore di quello degli induttori):
QC = ωRCP C
(1.3)
Tornando al risonatore, detto QTOT il Q complessivo e supposto
QC>>QL, si ha:
15
CAPITOLO I – Teoria di base sugli oscillatori
1
QTOT
=
1
1
+
⇒ QTOT ≅ Q L
QC Q L
(1.4)
Il Q del risonatore è perciò stabilito da quello dell’induttore. Si
consideri quindi il modello di un risonatore ideale rappresentato in Fig. 1.3,
L
RLS
C
RCP
L
C
RLC
Fig. 1.3 – Risonatore reale
La resistenza equivalente RP (sempre nell’ipotesi che QC >>QL) è data da:
(
)
RLC = RCP // RLS QL ≅ RLS QL
2
2
(1.5)
e dipende da quella di perdita dell’induttore.
Il Q del risonatore è:
Q = ω 0 RLC C =
RLC
ω0 L
con
ω0 =
1
LC
(1.6)
Per realizzare un oscillatore è necessario porre una resistenza negativa –Ra
in parallelo (o in serie, nel caso di oscillatore LC serie) al risonatore,
rappresentata da un circuito attivo che periodicamente fornisce energia per
compensare le perdite del risonatore stesso. Bisogna però far si che questa
resistenza abbia valore diverso man mano che le oscillazioni aumentano in
ampiezza: inizialmente il parallelo tra RLC ed Ra dovrà essere negativo e,
16
CAPITOLO I – Teoria di base sugli oscillatori
successivamente, di valore infinito (con –Ra=RLC) in maniera da annullare le
perdite e realizzare un risonatore ideale.
17
CAPITOLO I – Teoria di base sugli oscillatori
1.3 – Modello a resistenza negativa
Esistono diversi modelli teorici che vengono utilizzati per l’analisi degli
oscillatori armonici. Tra di essi:
• modello di Van Der Pol
• modello a retroazione
• modello a resistenza negativa
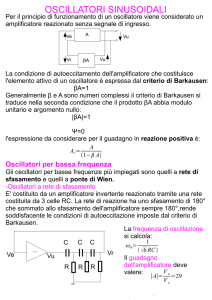
Il nostro progetto farà riferimento al modello a resistenza negativa (Fig. 1.4).
Circuito
attivo
Circuito
risonatore
-RA
RT
Fig. 1.4 – Modello a resistenza negativa
In tale modello, l’oscillatore si compone di due parti: una denominata circuito
attivo e l’altra denominata circuito risonatore.
Il circuito attivo ha lo scopo di fornire l’energia necessaria per l’innesco
ed il mantenimento delle oscillazioni del sistema; il circuito risonatore,
costituito generalmente da un circuito RLC, ha lo scopo di fissare l’opportuna
frequenza di lavoro dell’oscillatore.
Nel nostro progetto il circuito attivo è realizzato tramite una coppia di
transistori MOS con connessione incrociata delle gate che generano
un’impedenza negativa; il circuito risonatore è costituito da un induttore, un
varactor (capacità variabile in funzione di una tensione di controllo) e da
18
CAPITOLO I – Teoria di base sugli oscillatori
ulteriori elementi parassiti essenzialmente resistivi dovuti alle perdite dei
componenti reattivi.
Utilizzando il modello ad impedenza negativa si ha che l’equazione
caratteristica del nostro sistema è data dalla seguente espressione:
f (s ) = Z A (s ) + Z T (s )
(1.7)
Tale modello per l’analisi di un oscillatore risulta essere notevolmente
vantaggioso quando si progettano oscillatori ad elevata frequenza in cui hanno
un peso rilevante gli elementi parassiti dovuti tanto ai componenti attivi quanto
a quelli passivi poiché in tal caso risulta semplice caratterizzare l’impedenza di
una porta.
19
CAPITOLO I – Teoria di base sugli oscillatori
1.4 – Funzionamento di un oscillatore
In questo paragrafo, tenendo presente il fatto che l’oscillatore è un circuito
non lineare, vediamo quali sono le condizioni che devono essere verificate
affinché esso funzioni in maniera corretta. Per prima cosa differenziamo le
condizioni di oscillazione tra le condizioni d’innesco e le condizioni di
oscillazione stabile.
1.4.1
– Condizioni di innesco
Al fine di attivare la condizione di instabilità e quindi di innesco dello
stato oscillante debbono essere verificate le seguenti condizioni:
R A (ω 0 ) + RT (ω 0 ) < 0
X A (ω 0 ) + X T (ω 0 ) = 0
(1.8)
dove ω0 risulta essere la frequenza di risonanza dell’oscillatore, valore di
frequenza in cui la componente reattiva totale del circuito risulta essere uguale
a zero. Nel caso ideale la ω0 risulta essere la effettiva frequenza di risonanza
del circuito. In realtà, poiché entrano in gioco in tale struttura diversi fenomeni,
la ω0 ricavata si discosta dal valore reale della frequenza di risonanza.
1.4.2
– Condizione di oscillazione stabile (criterio di Barkhausen)
Una volta innescato lo stato oscillante a causa delle non linearità di
funzionamento del sistema si raggiunge una condizione di equilibrio descritta
dalle seguenti espressioni:
20
CAPITOLO I – Teoria di base sugli oscillatori
R A (ω 0 ) + RT (ω 0 ) = 0
X A (ω 0 ) + X T (ω 0 ) = 0
(1.9)
Tale condizione di equilibrio è dovuta alla dipendenza della RA
dall’ampiezza delle oscillazioni del circuito, infatti ricordiamo che l’ampiezza
del segnale può crescere sino a portare i transistori in regioni di funzionamento
quali la saturazione provocando quindi decremento del guadagno della parte
attiva. Ciò implica che raggiunto un massimo dell’ampiezza di oscillazione il
sistema si stabilizza.
21
CAPITOLO I – Teoria di base sugli oscillatori
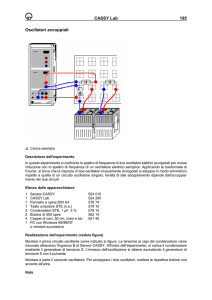
1.5 – Rumore in un oscillatore
Uno dei problemi degli oscillatori, specialmente in ambito RF, è quello del
rumore. Idealmente si vorrebbe produrre un segnale con una sola armonica, ma
in realtà quello che viene fuori è uno spettro che solo approssimativamente
può essere assimilabile ad una riga.
1.5.1 – Calcolo della densità spettale in uscita
Per poter calcolare il rumore in un oscillatore, consideriamo il circuito
base (vedi Fig. 1.5), costituito da un risonatore LC parallelo comprensivo degli
effetti parassiti (sintetizzati dalla gp) e un circuito attivo (rappresentato dalla
Gm).
Circuito attivo
Risonatore
V0
Gm
L
C
gp
IX
Fig. 1.5 – Oscillatore eccitato da un tono di corrente
Supponiamo di eccitare l’oscillatore con un tono di corrente IX(jω) e
vediamo che la tensione al nodo V0 è data dalla seguente espressione:
22
CAPITOLO I – Teoria di base sugli oscillatori
V 0 ( jω ) =
I X ( jω )
1 ⎞
⎛
g p − G m + j ⎜ ωC −
⎟
ωL ⎠
⎝
Dalla (1.10), si deduce che ogni volta che gp=Gm e ω 0 = 1
(1.10)
LC
, ovvero ogni
volta che sono verificate le condizioni di Barkhausen, la tensione al nodo V0
sarà un tono sinusoidale alla frequenza ω0.
Adesso supponiamo di studiare lo stesso circuito di prima, nell’ipotesi
che siano note le condizioni di Barkhausen e che stavolta IX sia una corrente di
rumore definita dalla relativa densità spettrale di potenza Sin(ω). Lo spettro
della densità di potenza associata alla tensione di rumore SV0(ω) è data dalla
seguente espressione:
SVO (ω ) =
S in (ω )
1 ⎞
⎛
j ⎜ ωC −
⎟
ωL ⎠
⎝
(1.11)
2
se ω=ω0+∆ω, dove ∆ω<<ω0, allora abbiamo che:
(ω 0 + ∆ω )C −
2(∆ωω 0 )LC + (∆ω ) LC
1
=
≈ 2C∆ω
(ω 0 + ∆ωL )
(ω 0 + ∆ω )L
2
sostituendo la (1.12) nella (1.11), si avrà:
23
(1.12)
CAPITOLO I – Teoria di base sugli oscillatori
SVO (ω ) =
S in (ω )
(1.13)
(2∆ωC )2
Dall’equazione (1.13) possiamo concludere che: la densità spettrale di
tensione di un oscillatore scende di 6dBs per ottava ogni volta che viene
applicato del rumore bianco.
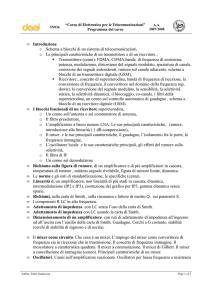
1.5.2 – Amplitude Noise e Phase Noise
Adesso supponiamo di applicare un tono solamente ad un lato dell’uscita
dell’oscillatore come mostrato in Fig. 1.6.
LO
Noise Tone
LO
AM Tone
LO
+
PM Tone
Fig. 1.6 – Decomposizione del rumore additivo
In questo caso, il tono di rumore può essere visto come la somma di due
contributi, uno legato alla modulazione d’ampiezza e uno alla modulazione di
fase. Inoltre possiamo dividere il rumore d’ingresso in un termine dovuto alla
modulazione d’ampiezza ed uno legato alla modulazione di fase:
24
CAPITOLO I – Teoria di base sugli oscillatori
S in (ω ) = S inAM (ω ) + S inPM (ω ) = 4kTg p
(1.14)
S inAM (ω ) = S inPM (ω ) =
1
4kTg p
2
avendo considerato che tutto il rumore sia dovuto alla conduttanza parallelo gp,
ovvero ipotizzando che essa includesse le perdite della cella LC e gli effetti di
carico di entrambi gli stadi attivi.
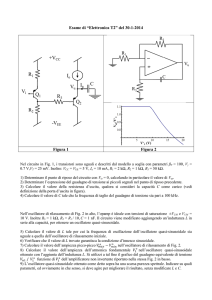
Nella realtà però le cose non funzionano come è stato detto nella (1.14),
poiché esiste un meccanismo di limitazione dell’ampiezza dovuto alla
saturazione dei dispositivi attivi. La Fig. 1.7 mostra la caratteristica della
transconduttanza ed evidenzia in modo chiaro la differenza fra uno stadio
attivo ideale ed un circuito reale.
I
Ideale
Reale
+Io
-Ao
+Ao
V
-Io
Fig. 1.7 – Comportamento della transconduttanza
25
CAPITOLO I – Teoria di base sugli oscillatori
È facile capire dal grafico che quando la corrente d’uscita
dell’oscillatore reale satura a +/-I0, un rumore additivo non è amplificato in
ampiezza.
Quindi, nelle vicinanze della portante, ω ≈ ω 0 , la densità spettrale della
tensione dovuta al rumore d’ampiezza è data dall’equazione (1.15). ad elevati
offset invece vale la (1.13) e perciò la densità spettrale della tensione d’uscita
dovuta al rumore di fase sarà data dall’equazione (1.16).
S voAM (ω ) = g p S inAM (ω ) =
2
S voPM (ω ) =
S inPM
(2∆ωC )2
gp
2
2
4kTg p
1
4kTg p
= 2
(2∆ωC )2
(1.15)
(1.16)
Le equazioni (1.15) e (1.16) mostrano che: ad un basso offset dalla portante,
lo spettro della portante è dominato dal rumore di modulazione di fase,
mentre appena l’offset si avvicina idealmente alla larghezza di banda del
risonatore, ω0/(2Q), il rumore d’ampiezza è paragonabile al rumore di fase.
Quanto detto è mostrato in Fig. 1.8.
26
CAPITOLO I – Teoria di base sugli oscillatori
Phase Noise
Amplitude Noise
ωo/Q
Fig. 1.8 – Contributi di rumore allo spettro d’uscita
Possiamo inoltre affermare, riferendoci allo spettro mostrato in Fig. I.4,
che l’appiattimento della potenza della portante ad un offset grande è dovuto al
rumore bianco aggiunto da eventuali stadi di amplificazione o da buffer
aggiunti in cascata all’oscillatore.
Ogni volta che il progettista va a fare una stima grossolana del rumore
di fase dell’oscillatore, deve nuovamente studiare la (1.16). La conduttanza di
perdita parallelo gp viene legata al Q del risonatore dalla seguente espressione:
gp ≈
ωC
1
= 0
ω 0 QL
Q
(1.17)
e perciò, sostituendo nella (1.16), si ha:
1
4kTg p
kT ω 0
2
S voPM (ω ) =
=
2
(2∆ωC ) 2C Q(∆ω )2
27
(1.18)
CAPITOLO I – Teoria di base sugli oscillatori
Se rievochiamo la definizione di Phase Noise data nell’introduzione e
se identifichiamo l’ampiezza della portante con A0, avremo che il Phase Noise
ad un offset ∆ω dalla portante sarà dato dalla seguente espressione:
L(∆ω ) =
S voPM (ω ) kT ω 0
1
=
2
1 2
C A0 Q (∆ω )2
A0
2
(1.19)
1.5.3 – Contributo del rumore Flicker sul Phase Noise
Per fare un’analisi precisa è necessario considerare il contributo di rumore
all’uscita fornito dai dispositivi attivi. Per fare ciò basta considerare nella
densità spettrale di rumore in ingresso un piccolo fattore di correzione F che
tiene conto del rumore Flicker:
S inPM (ω ) =
1
4kTg p (1 + F )
2
(1.20)
Una volta considerato il rumore Flicker, possiamo correggere il Phase Noise:
L(∆ω ) =
S voPM (∆ω ) kT ω 0 1 + F
=
1 2
C A0 2 Q (∆ω )2
A0
2
28
⎛ ω flic ker
⎜⎜1 +
∆ω
⎝
⎞
⎟⎟
⎠
(1.21)
CAPITOLO I – Teoria di base sugli oscillatori
L(Δω)
Pendenza:
9dBs/ottava
1
(∆ω )3
1
ω flic ker
(∆ω )2
Pendenza:
6dBs/ottava
Δω
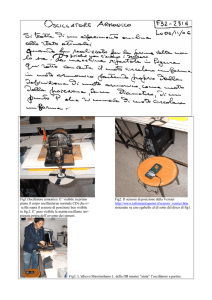
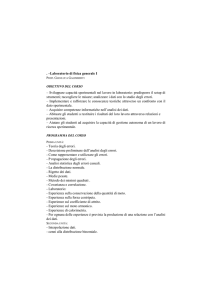
Fig. 1.9 – Influenza del rumore Flicker sul Phase Noise
Il parametro ωflicker è di solito l’offset al quale i dispositivi attivi mostrano il
loro angolo di flicker. Nella Fig. 1.9 è mostrato l’SSB Phase Noise.
Ad un offset molto basso dalle portante, il Phase Noise scende con una
pendenza di 9dBs per ottava a causa del contributo del rumore flicker; dopo
l’angolo di flicker, il Phase Noise scende di 6dBs per ottava.
1.5.4 – Consigli utili per la progettazione
L’equazione (1.21) fornisce ai progettisti delle ottime dritte per
migliorare la progettazione di un oscillatore LC parallelo. Innanzitutto,
l’ampiezza dell’oscillazione e il Q del risonatore potrebbero essere
massimizzati. È anche dimostrato che, data una certa frequenza di oscillazione
ω0 = 1
LC
, il progettista può scegliere un valore per la capacità, il più alto
possibile.
29
CAPITOLO I – Teoria di base sugli oscillatori
Attualmente si può dimostrare che la dissipazione di potenza di un
oscillatore aumenta con C così che spesso i progettisti hanno messo in
commercio dispositivi che danno ottime prestazioni sul rumore ma solo per
applicazioni a bassa dissipazione di potenza.
Dopo aver spiegato abbastanza dettagliatamente come funzionano gli
oscillatori e come si misurano le loro prestazioni, nei prossimi capitoli
descriveremo nel dettaglio i singoli componenti che li compongono
(condensatori, induttori e coppie differenziali) e poi passeremo alla
progettazione del nostro VCO a 24GHz.
30
 Capitolo I - Teoria di base sugli oscillatori")