Teoria dei Segnali 1
G.V. Pallottino 2009
segnali 1-15
sistemi 1-11
rumore 1- 24
bibliografia
Dipartimento di Fisica
Università di Roma Sapienza
1. SEGNALI, INFORMAZIONE E TEOREMA DEL CAMPIONAMENTO
Chiamiamo segnali le grandezze fisiche delle quali ci interessa
l’andamento in funzione del tempo e che trasportano informazione.
Si possono considerare anche segnali (immagini) funzione di coordinate
spaziali, ma qui ci limiteremo alle funzioni del tempo.
L’informazione I associata a un campione di segnale che può assumere n
diversi valori con la medesima probabilità è data dalla formula di Hartley
(1)
I = log2 n
(in unità di bit)
che Shannon ha poi generalizzato al caso di probabilità arbitrarie
(1a)
I = Σi pi log2(1/pi)
L’informazione associata a una grandezza analogica (numero reale) s
sembrebbe dunque infinita
ma non è così: quanti sono i valori di s effettivamente distinguibili?
C’è sempre infatti, per motivi fondamentali o per motivi strumentali, una
incertezza s sul valore effettivo di s, sicchè il numero di livelli
effettivamente distinguibili è finito, almeno per una grandezza compresa in
un intervallo finito s:
(2)
n s/s
I<
Sembra pure infinita l’informazione associata a una funzione del tempo
s(t), dato che t è una grandezza reale. E dunque, anche in un intervallo di
tempo finito, si hanno infiniti valori di s. Ma questi valori non sono
evidentemente (statisticamente) indipendenti fra loro.
Portano informazione solo i valori indipendenti, separati l’uno dall’altro da
un tempo caratteristico t, sicchè in un intervallo t l’informazione totale,
finita, è (t/t) log2(s/s).
segnali 1
La valutazione dell’informazione associata a un segnale s(t) può farsi
utilizzando il teorema del campionamento. Questo stabilisce che un
segnale può essere ricostruito dai suoi campioni, presi a intervalli regolari
Tc, se la frequenza di campionamento fc=1/Tc soddisfa la relazione
(3)
fc fN = 2B
dove B è la larghezza di banda del segnale, definita qui come la massima
frequenza dello spettro di Fourier del segnale stesso, e la frequenza fN è
chiamata frequenza di Nyquist.
Si conclude allora che l’informazione associata a un segnale s(t) in un
intervallo di tempo t, contenente t/Tc campioni strettamente necessari, è
(4)
I 2 t B log2(s/s)
Alcune precisazioni sul teorema del campionamento
(chi lo ha introdotto? Nyquist? Shannon? V.A. Kotelnikov nel 1933)
1) Il contenuto spettrale del segnale non si estende sempre da frequenza
zero a una frequenza limite superiore (segnali passabasso). La banda
del segnale può riguardare infatti una regione spettrale dotata di un
limite inferiore e di uno superiore, entrambi finiti, per esempio la
regione attorno a una frequenza di risonanza (segnali passabanda). In
tal caso non vi è alcuna relazione fra la massima frequenza del segnale
e la banda B che va considerata nelle precedenti relazioni.
2) Se un segnale viene campionato a frequenza inferiore a quella di
Nyquist, allora il segnale ricostruito dai suoi campioni non coincide
più con quello originale, perchè il suo contenuto spettrale che eccede
fc/2 viene ribaltato in banda, con effetto di distorsione.
Più precisamente, una frequenza f> fc/2, con f-fc/2=f, nel segnale
ricostruito verrà a trovarsi spostato alla frequenza fc/2-f (fenomeno
chiamato aliasing).
segnali 2
3) Questo significa che è errato campionare un segnale a frequenza
inferiore a quella espressa dalla (3) qualora il contenuto spettrale “utile”
del segnale abbia larghezza di banda inferiore a B, e si consideri dunque
“rumore” la parte residua. Perchè questo “rumore”, per quanto detto in 2),
si manifesterà poi nel segnale ricostruito, a frequenze diverse da quelle
originali. In questo caso, infatti, prima di campionare il segnale, occorre
filtrarlo opportunamente per eliminare le frequenze indesiderate.
4) Nel caso limite del campionamento eseguito esattamente alla frequenza
di Nyquist, la ricostruzione del segnale è possibile soltanto moltiplicando
la serie temporale sk per i valori corrispondenti della funzione sinc e
sommando poi quanto si ottiene:
s t k s(kTc )
sin c (t kTc ) / 2
c (t kTc ) / 2
(interpretazione: il generico campione viene moltiplicato per una funzione
interpolante che vale 1 all’istante del campione, 0 al tempo degli altri campioni)
5) Campionando a frequenze maggiori di quanto strettamente necessario
si può ottenere un’ottima ricostruzione del segnale anche usando algoritmi
assai più semplici: interpolatore di ordine zero a campionamento e tenuta
(sample and hold), interpolatore lineare, interpolatore quadratico, ecc.
Nel mondo fisico esistono soltanto segnali reali funzione del tempo
reale (segnali analogici)
Nella strumentazione si considerano anche segnali discreti,
nei valori dell’ampiezza (possono assumere soltanto due o più valori
appartenti a un insieme finito)
nei valori del tempo (si considerano significativi i valori dei segnali
soltanto a istanti discreti del tempo)
Nei calcolatori i segnali non possono essere rappresentati altro che in
forma discreta. Ma spesso ci dimentichiamo della discretizzazione
d’ampiezza, con effetti perversi.
segnali 3
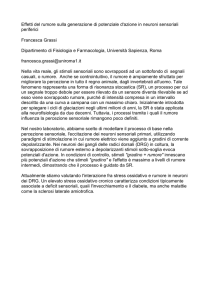
1. Campionamento e ricostruzione di segnali periodici
frequenze del segnale f1 := 1.00 f2 := 3.00
banda del segnale B := max f1 , f2
B=3
(
frequenza di campionamento
periodo di campionamento
)
(tutte le grandezze espresse in unità SI)
frequenza di Nyquist
fc := fN + .1
fc = 6.1
1
Tc :=
Tc = 0.164
fc
(
)
s ( t) := sin 2⋅ π⋅ f1⋅ t +
K := 1000 k := 0 .. K
(
)
1
sin 2⋅ π⋅ f2⋅ t
3
1
K⋅ Tc = 163.934
estendono da 0 a
fN = 6
(il calcolatore non sa che lim x--->0 sin(x)/x =1)
segnale analogico, che tenta di assomigliare a un'onda quadra
i tempi discreti si
fN := 2⋅ B
0.5
(
1
0.5
ssk
0
− 0.5
−1
)
ssk := s k⋅ Tc
segnale campionato
s ( t)
0
− 0.5
−1
0
5
10
k
15
0.5
K
∑
sr( t) :=
k=0
meno bene agli estremi dell'intervallo
1
0.5
0.5
sr ( t)
0
0
− 0.5
0
0.5
1
t
1.5
−1
80
2
come indica anche l'andamento dello scarto fra l'originale e il ricostruito
80.5
81
t
81.5
82
sca ( t) := sr( t) − s ( t)
0.1
0.2
0.01
0.1
5×10
0
0.05
−3
sca ( t)
− 0.1
sca ( t)
− 0.2
− 0.3
2
molto bene al centro dell'intervallo
− 0.5
sca ( t)
1.5
⎛ sin (π⋅ fc t − k⋅ π) ⎞
⎜ ssk⋅
⎟
π⋅ fc t − k⋅ π
⎝
⎠
1
−1
1
t
20
segnale ricostruito dai suoi campioni
sr ( t)
0
0
− 0.05
−3
− 5×10
0 0.5 1 1.5 2
t
− 0.01
80
0
− 0.1
159
80.5
81
t
81.5
82
160
t
161
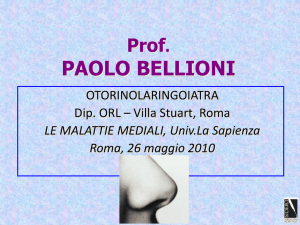
2. Campionamento a frequenza inferiore a quella di Nyquist: due frequenze che diventano una
frequenze del segnale f1 := 1.00 f2 := 5.20
(
)
B := max f1 , f2
banda del segnale
frequenza di campionamento
periodo di campionamento
B = 5.2
frequenza di Nyquist
fc := fN + .2
fc = 10.6
1
Tc :=
Tc = 0.161
fc
K := 1000 k := 0 .. K
(
)
s ( t) := sin 2⋅ π⋅ f1⋅ t +
(
)
1
sin 2⋅ π⋅ f2⋅ t
3
2
K⋅ Tc = 161.29
estendono da 0 a
fN = 10.4
fc := 6.2
e invece si sceglie
segnale analogico, con spettro che eccede il limite posto da fc
i tempi discreti si
fN := 2⋅ B
1
(
1
0.5
ssk
0
− 0.5
−1
)
ssk := s k⋅ Tc
segnale campionato
s ( t)
0
−1
−2
0
5
10
k
15
0
0.5
1
t
1.5
2
20
K
sr( t) :=
segnale ricostruito dai suoi campioni
∑
k=0
⎛ sin (π⋅ fc t − k⋅ π) ⎞
⎜ ssk⋅
⎟
π⋅ fc t − k⋅ π
⎝
⎠
1
il segnale ricostruito ora contiene soltanto una
sinusoide a 1 Hz, combinazione della sinusoide
originale a 1 Hz e di quella prodotta dal
ribaltamento in banda di quella a 5.2 Hz, che
appare alla frequenza 6.2 - 5.2 = 1 Hz
0.5
sr ( t)
0
− 0.5
−1
0
1
2
t
3
4
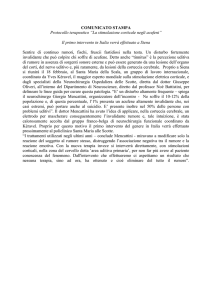
3. Campionamento a frequenza inferiore a quella di Nyquist:
due frequenze scelte in modo da ottenere una "quasi" onda quadra
frequenze del segnale f1 := 1.00 f2 := 9.20
(
)
B := max f1 , f2
banda del segnale
frequenza di campionamento
periodo di campionamento
B = 9.2
frequenza di Nyquist
fc := fN + .2
fc = 18.6
1
Tc :=
Tc = 0.161
fc
K := 1000 k := 0 .. K
(
)
s ( t) := sin 2⋅ π⋅ f1⋅ t +
(
)
1
sin 2⋅ π⋅ f2⋅ t
3
2
K⋅ Tc = 161.29
estendono da 0 a
fN = 18.4
fc := 6.2
e invece si sceglie
segnale analogico, con spettro che eccede il limite posto da fc
i tempi discreti si
fN := 2⋅ B
1
(
1
0.5
ssk
0
− 0.5
−1
)
ssk := s k⋅ Tc
segnale campionato
s ( t)
0
−1
−2
0
5
10
k
15
0
0.5
1
t
1.5
2
20
K
sr( t) :=
segnale ricostruito dai suoi campioni
∑
k=0
⎛ sin (π⋅ fc t − k⋅ π) ⎞
⎜ ssk⋅
⎟
π⋅ fc t − k⋅ π
⎝
⎠
1
il segnale ricostruito ora contiene la sinusoide
originale a 1 Hz e quella prodotta dal
ribaltamento in banda di quella originariamente
a 9.2 Hz, che viene ribaltata in banda
alla frequenza 9.2 - 6.2 = 3 Hz con fase tale
da produrre una "quasi" onda quadra
0.5
sr ( t)
0
− 0.5
−1
0
1
2
t
3
4
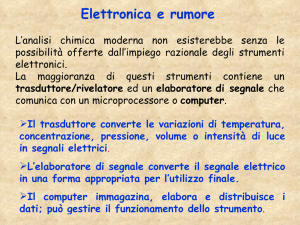
3. Campionamento di un segnale passabanda a una frequenza inferiore a quella di Nyquist,
scelta in modo da spostare il segnale dalla "frequenza portante" a frequenza zero
mantenendo però l'informazione utile
frequenza centrale del segnale f1 := 1.00
banda del segnale
(
)
B := max f1 , f2
frequenza di campionamento
periodo di campionamento
f2 := 0
B=1
trascuriamo il fatto che lo spettro si estende oltre 1 Hz
fc := fN + .1
fc = 2.1
1
Tc :=
Tc = 1
fc
estendono da 0 a
⎛ −t ⎞ ⋅ cos 2⋅ π⋅ f ⋅ t
⎟ (
1 )
⎝ 50 ⎠
s ( t) := exp ⎜
K := 1000 k := 0 .. K
1
3
K⋅ Tc = 1 × 10
(
0.5
s ( t)
)
ssk := s k⋅ Tc
segnale campionato
− t⎞
⎟
⎝ 50 ⎠
exp ⎛⎜
0
− 0.5
0.8
ssk
fN = 2
fc := 1
e invece si sceglie
ora il segnale analogico è una sinusoide smorzata
i tempi discreti si
fN := 2⋅ B
frequenza di Nyquist
−1
10
0.4
11
12
13
14
15
t
0
0
10
20
30
k
K
sr( t) :=
segnale ricostruito dai suoi campioni
∑
k=0
sr ( t)
il segnale ricostruito contiene ora
soltanto l'onda esponenziale, che
modulava l'ampiezza della sinusoide a 1
Hz
(e ora modula la frequenza zero dove la
sinusoide è stata spostata)
0.8
0.6
− t⎞
0.4
⎟
⎝ 50 ⎠
0.2
exp ⎛⎜
0
10
⎛ sin (π⋅ fc t − k⋅ π) ⎞
⎜ ssk⋅
⎟
π⋅ fc t − k⋅ π
⎝
⎠
11
12
13
t
14
15
2. SEGNALI DETERMINISTICI
Segnali deterministici sono quelli suscettibili di una rappresentazione
analitica, perchè seguono leggi ben definite, come
x(t) = A cos(t)
oppure
y(t) = e-t/
generalmente usando sia funzioni ordinarie che funzioni generalizzate.
Queste ultime le indicheremo con i seguenti simboli:
funzione delta: (t)
funzione gradino unitario (step function, Heaviside function): u(t)
nella letteratura indicata anche con le notazioni:
1(t), H(t), (t), -1(t), (t)
I segnali deterministici, oltre che nel dominio del tempo, possono
rappresentarsi nel dominio della frequenza. Reale o complessa, a seconda
che se ne consideri la trasformata di Fourier oppure di Laplace.
Una distinzione importante riguarda il supporto temporale dei segnali. Se
questo è limitato abbiamo segnali transitori (per esempio pacchetti
d’onda), tipicamente Fourier trasformabili. Altrimenti i segnali non sono
generalmente Fourier trasformabili, se non ricorrendo a funzioni
generalizzate.
Per segnali di forma gaussiana, aventi quindi trasformata gaussiana, il
prodotto della “durata” per la “larghezza di banda ha valore costante. Tale
proprietà vale anche, approssimativamente, per segnali transitori di forma
arbitraria (principio d’indeterminazione tempo- frequenza). Ciò significa
che un segnale “breve”, fortemente localizzato sull’asse dei tempi, avra’
uno spettro poco localizzato in frequenza, e viceversa per un segnale
“lungo”.
segnali 4
3. SEGNALI CASUALI
I segnali casuali non hanno rappresentazione analitica. Uno specifico
segnale casuale, per esempio il rumore di un resistore, è rappresentato dal
suo andamento temporale, o da una opportuna sequenza dei suoi campioni
(ottenuti sperimentalmente o mediante simulazione al calcolatore).
I segnali casuali, in generale, possono essere rappresentati soltanto in
termini delle loro proprietà statistiche. Proprietà statiche, riguardanti i
valori del segnale, a prescindere dalla loro posizione sull’asse del tempo.
Proprietà dinamiche, in cui intervengono le relazioni fra i valori assunti a
diversi istanti di tempo e i tempi in questione.
Un modello usato spesso, sebbene non faccia intervenire in alcun modo la
dipendenza dal tempo, e dunque possa rappresentare soltanto le proprietà
statiche di un segnale casuale: variabile casuale
(valori estratti a caso con determinate probabilita’)
In tal caso il segnale viene caratterizzato con la sua funzione di
distribuzione
Fs(x) = P(s<x)
cioè la probabilità che il segnale s assuma valori inferiori al livello di
riferimento x. Fs(x) è una probabilita’ e pertanto rientra nell’intervallo fra
0 e 1. Generalmente
Fs(-) = 0, Fs() = 1.
Oppure viene caratterizzato con la sua densità di probabilità
fs(x) = dFs(x)/dx
cioè la derivata della precedente rispetto a x.
segnali 5
Caratterizzazione alternativa (utile perché più compatta) di una variabile
casuale è quella basata sui momenti della densità di probabilità:
valor medio s = E[s]
(momento del primo ordine)
2
2
varianza
= E[(s-s) ] (momento centrale del secondo ordine)
eccetera
dove l’operatore di aspettazione E[ ] è l’integrale da meno infinito a più
infinito del suo argomento pesato con la funzione densità, che rappresenta
l’operazione di media d’insieme.
Se il segnale ha distribuzione Gaussiana, esso è completamente
caratterizzato dal valor medio e dalla varianza. Altrimenti, in generale,
occorre specificare infiniti momenti.
I segnali reali hanno densità di probabilità espresse da funzioni ordinarie.
I segnali discreti hanno densità espresse da funzioni delta. Per esempio la
densità di un segnale che rappresenti i numeri di un dado sarà:
(1/6) i (s-i)
con i =1, 2, ... 6.
Miscele di funzioni ordinarie e delta rappresentano la densità di probabilità
di segnali particolari.
Per esempio un segnale con densità Gaussiana che abbia attraversato un
limitatore simmetrico avrà densità ancora Gaussiana, ma solo fra i due
valori limite, più la somma di due funzioni delta, che rappresentano tali
valori, su cui appunto il segnale gradisce soffermarsi.
Questa rappresentazione è usata talvolta anche per i segnali deterministici.
In tal caso la densità di probabilità viene chiamata densità d’ampiezza.
Un’onda quadra ha densità d’ampiezza costituita da due funzioni delta. La
densità di una sinusoide di ampiezza A è compresa fra –A e A secondo la
legge:
f s ( x)
1
A x
2
2
nell’intervallo fra –A e A
segnali 6
Notiamo che il comportamento di molti strumenti dipende dalla densità dei
segnali sottoposti a misura. Pensiamo al caso di un voltmetro per corrente
alternata (un comune tester) tarato per fornire il valore efficace di segnali
sinusoidali. Esso non darà il corretto valore efficace quando vede un’onda
quadra, un’onda triangolare oppure un segnale a densità Gaussiana (a
meno che non sia del tipo “a vero valore efficace”).
Teorema importante per il calcolo della densità di probabilità di un segnale
funzione di un segnale casuale dato. Particolarmente utile quando il
sistema (statico) è nonlineare.
x(t)
sistema statico
y = g(x)
y(t)
Il sistema è rappresentato dalla funzione g(x), che è continua e non assume
valori costanti in nessun intervallo. Cioè per un dato valore di y
l’equazione y=g(x) possiede al più un numero contabile di radici x1, x2, ...
xn. Teorema: se l’ingresso ha densità fx(x), la densità dell’uscita è
f y ( y ) i
f x ( xi )
dg ( xi )
dx
sommando sulle n radici
Si dimostra considerando la probabilità fy(y)dy che l’uscita si trovi in un
intervallino fra y e y+dy.
Il risultato si estende facilmente al caso in cui la funzione y=g(x) assuma
valori costanti yk, corrispondenti a determinati intervalli di x.
In tal caso all’espressione precedente si sommano altrettante funzioni
delta, ciascuna del tipo P(yk) y-yk) con
P( yk ) f x ( x) dx
(integrando sui corrispondenti intervalli di x)
segnali 7
PROCESSI STOCASTICI
Modello assai più potente, per la rappresentazione dei segnali casuali, è il
processo stocastico. Dove l’estrazione a caso, con probabilità
preassegnate, non riguarda numeri, ma funzioni del tempo.
Più precisamente, un processo stocastico è definito da un esperimento
probabilistico nel quale a ciascun risultato, che si verifica con una data
probabilità, è assegnata una funzione del tempo. Queste funzioni si
chiamano realizzazioni del processo. Che è definito dal loro insieme e
dalle rispettive probabilità.
ESEMPIO
Lancio di una moneta (truccata) con i seguenti risultati
testa, con probabilità Pt = 0.4 e funzione ft(t) = t
croce, con probabilità Pc = 0.6 e funzione fc(t) = t2
Processi stazionari hanno proprietà statistiche tutte invarianti nel tempo. Il
processo di sopra non è stazionario: infatti, in particolare, il suo valor
medio è: 0.4 t + 0.6 t2
Nei processi ergodici la conoscenza di una sola realizzazione consente di
determinare tutte le proprietà statistiche del processo. Allora le medie
d’insieme sono sostituibili con medie temporali su una qualsiasi delle
realizzazioni.
Per esempio, per il valor medio, abbiamo:
x
f ( x ) x dx x limT
1
2T
T
x(t ) dt
T
segnali 8
FUNZIONI DI CORRELAZIONE
Grande importanza ha la funzione di autocorrelazione di un processo x(t),
definita nel caso generale con la seguente media d’insieme
Rxx(t1, t2) = E[x(t1) x(t2)]
che rappresenta il grado di relazione statistica fra i valori del processo agli
istanti t1 e t2. Dunque anche la prevedibilita’ del processo fra t1 e t2.
Per un processo stazionario ed ergodico, data l’invarianza delle proprietà
statistiche rispetto a traslazione sull’asse dei tempi, la dipendenza dai
tempi diventa una dipendenza dalla differenza fra i tempi: = t1 - t2.
Si ha allora:
Rxx E x(t ) x(t ) limT
1
2T
T
x(t ) x(t )dt
T
Qualche proprietà generale dell’autocorrelazione:
Rxx(0) = E[x(t)2] = 2 + 2
valore quadratico medio del processo
(nel caso di segnali elettrici esprime il fatto che la potenza totale è la
somma di quella in continua e di quella in alternata)
Rxx(0) Rxx()
Rxx() = Rxx(-)
uguaglianza solo in casi particolari (quali?)
si tratta dunque di una funzione pari
l’ultima proprietà mostra che si possono fare previsioni in avanti sull’asse
dei tempi altrettanto bene che all’indietro.
Si considera talvolta la funzione di autocorrelazione normalizzata
() = R()/R(0)
compresa dunque nell’intervallo fra –1 e 1
segnali 9
Consideriamo due casi limite.
incertezza totale: conoscere il valore del processo a un certo istante t non
dà nessuna informazione per prevederne i valori ad altri istanti
in tal caso Rxx()=0 dovunque salvo che per =0, cioè:
Rxx() = 2
determinazione totale: conoscere il processo a un istante significa
conoscerlo dovunque. E’ il caso di un segnale costante x(t) = a (unica
realizzazione, con probabilità 1), la cui autocorrelazione è
Rxx() = a2
In generale si hanno situazioni intermedie: Rxx() decresce al crescere (del
modulo) dell’argomento, magari oscillando, dal massimo per =0
a zero per infinito.
Si definisce allora un tempo di correlazione c per cui
|Rxx(c)| = Rxx()/e oppure come
1
c
R( ) d
R(0) 0
ESEMPIO
Il rumore bianco filtrato da un filtro del primo ordine (per esempio un
circuito RC) con costante di tempo to ha autocorrelazione:
Rxx() = Rxx() exp(-|to)
In questo caso il tempo di correlazione coincide con la costante di tempo.
ESEMPIO
Processo costituito da una sinusoide di ampiezza, frequenza e fase date
(oppure con fase casuale, per esempio avente distribuzione uniforme fra –
e ) : A sin(ot+
L’autocorrelazione è: R(t) = (A2/2) cos(ot)
che dipende solo dall’ampiezza e dalla frequenza, ma non dalla fase, della
sinusoide originale.
segnali 10
La correlazione fra due processi x(t) e y(t) è rappresentata dalla funzione di
correlazione incrociata
1 T
Rxy ( ) E[ x(t ) y (t )] lim T
x(t ) y (t ) dt
2T T
che è nulla ovunque se i due processi sono scorrelati, e non è in generale
una funzione pari, essendo Rxy() diversa da Rxy()
Rxy() = Ryx()
e non avendo generalmente massimo all’origine.
Si ha inoltre: |Rxy()|2 Rxx()Ryy(
Esempio di uso pratico della correlazione incrociata: determinare il ritardo
fra due segnali casuali (per esempio la velocità di propagazione di un
fluido turbolento in un condotto, usando due trasduttori di vibrazione)
Funzioni di covarianza
Hanno definizioni identiche alle funzioni di correlazione viste sinora, salvo
che alle funzioni vengono sottratti i rispettivi valori medi
in modo da rappresentare soltanto correlazioni fra “variazioni”
Cxx() = E[(x(t + ) - x) (x(t) - x)]
Cxy() = E[(x(t + ) - x) (y(t) - y)]
Si ha in particolare:
C(0) = 2
C(0) = R(0) - 2
segnali 11
SPETTRI DI POTENZA
Le proprietà spettrali dei segnali deterministici sono descritte dalla loro
trasformata di Fourier. I segnali casuali non sono Fourier trasformabili, ma
possiedono generalmente una funzione di autocorrelazione.
Per caratterizzarli nel dominio della frequenza si usa la trasformata di
Fourier dell’autocorrelazione R(τ), chiamata spettro di potenza o densità
spettrale di potenza S() (power spectrum, power spectral density)
S ( ) R( ) e j d
1
j
R( )
d
S ( ) e
2
relazioni che costituiscono il teorema di Wiener-Khintchin
Lo spettro di potenza S() è una funzione reale di , non negativa, che
rappresenta la distribuzione di energia del segnale sull’asse delle
frequenze.
L’energia totale, in particolare, cioè il valore quadratico medio del segnale,
si ottiene integrando lo spettro si tutto l’asse delle frequenze:
1
R(0)
S ( ) d
2
Unita’ di misura degli spettri di potenza? Quella al quadrato della
grandezza fisica rappresentata per un tempo o su Hz.
Per una forza e una corrente elettrica: N2/Hz, A2/Hz.
E per una frequenza?
segnali 12
Cosi’ definito, lo spettro di potenza S() si estende fra meno e piu’
infinito, e per questo si chiama spettro bilatero (two-sided). Ma siccome
R() = R(-), ne consegue che S()=S(-), sicchè basta conoscere lo
spettro per
Talvolta, allo scopo di avere a che fare solo con frequenze positive, si
usano gli spettri unilateri:
SU() = 2SB()
dove SB()=S() è lo spettro definito prima
La varianza di un segnale con spettro continuo S(f) in un intervallino di
frequenza df attorno a fo è infatti 2 = 2S(f)df = SU(f) df.
Spesso si considerano in pratica spettri di ampiezza, definiti come radice
quadrata di spettri unilateri (con l’unita’ di misura della grandezza
rappresentata su radice di Hz: per esempio V/ Hz ).
SPETTRI INCROCIATI
Trasformando una funzione di correlazione incrociata Rxy() si ha lo
spettro incrociato Sxy(j): una funzione complessa di che esprime in
termini spettrali le proprieta’ di correlazione fra due segnali x(t) e y(t).
Per qualsiasi frequenza si ha
|Sxy()|2 Sxx() Syy()
con l’uguaglianza alle frequenze in cui la correlazione spettrale fra i due
segnali e’ totale.
segnali 13
R() = ()
S() = cost
rumore bianco
R()=a2
S(
segnale costante
x(t) = a
segnale casuale
filtrato passabasso
(a banda limitata)
segnali 14
SEGNALI A BANDA STRETTA
Osservando all’oscilloscopio un segnale a banda stretta, per esempio
rumore bianco filtrato da da un sistema risonante ad alto Q, si vede una
sinusoide, di cui varia lentamente nel tempo l’ampiezza e la fase.
Da questa osservazione deriva l’importante rappresentazione di Rice:
un segnale passabanda s(t), avente cioè contenuto spettrale (trasformata di
Fourier o spettro di potenza) apprezzabile soltanto in una ristretta regione
di frequenza angolare attorno alla pulsazione o, può essere
rappresentato con ottima approssimazione dalla legge
s(t) = a(t) cos(ot) – b(t) sin(ot)
dove le funzioni a(t) e b(t) variano nel tempo assai più lentamente del
segnale s(t), con contenuto spettrale fra zero e
cioè sono due segnali passabasso
Si tratta di una sorta di sviluppo in serie di Fourier al primo ordine, ma con
coefficienti variabili nel tempo.
La conseguenza è che il segnale s(t) è noto, cioè ricostruibile, se si
conoscono o e gli andamenti temporali di a(t) e b(t).
E dunque è possibile campionare a(t) e b(t) a bassa velocità, assai inferiore
a quella richiesta per il campionamento di s(t).
segnali 15
SISTEMI
Aggregati di oggetti fisici che qui interessano solo in quanto eseguono
elaborazioni sui segnali. O anche, semplicemente, modelli matematici di
sistemi fisici.
Dove nella modellizzazione è centrale la rappresentazione delle sole
proprietà che interessano effettivamente (economia e specificità).
Prescindendo comunque dalla effettiva natura fisica dei sistemi, che
intendiamo come enti che trasformano un segnale (ingresso) in un altro
(uscita).
Comportamento ingresso-uscita
Comportamento ingresso-stato-uscita
(scatola nera)
(scatola grigia)
A seconda che si considerino solo le relazioni fra segnali d’ingresso e di
uscita,
oppure si vogliano rappresentare anche certe variabili interne al sistema
(variabili di stato): quelle che sono legate all’immagazzinamento di
energia, e dunque alle proprieta’ di memoria.
sistemi 1
1. CLASSIFICAZIONE
sistemi stazionari (time invariant): sono descritti da equazioni a
coefficienti costanti, hanno proprietà invarianti nel tempo:
se
allora
x(t) y(t)
x(t+T) y(t+T)
T
sistemi lineari: sono descritti da equazioni lineari,
vale il principio di sovrapposizione degli effetti:
se
e
allora
x1(t) y1(t)
x2(t) y2(t)
x1(t) + x2(t) y1(t) y1(t)
,
(a partire da condizioni iniziali nulle)
Ciò comporta sia l’omogeneità che l’additività.
sistemi statici: sono descritti da equazioni algebriche,
l’uscita a un dato istante dipende esclusivamente dall’ingresso all’istante
considerato,
sono privi di memoria (non immagazzinano energia)
alternativi ai precedenti sono i sistemi dinamici: descritti da equazioni
differenziali (equazioni alle differenze nel tempo discreto),
l’uscita a un dato istante non dipende solo dall’ingresso all’istante
considerato, ma anche ad altri istanti
soltanto istanti precedenti per i sistemi causali (fisicamente
realizzabili) dotati di memoria
anche istanti successivi per i sistemi non causali (in particolare nella
elaborazione di dati già registrati)
sistemi a costanti concentrate: descritti da equazioni differenziali ordinarie
sistemi a costanti distribuite: descritti da equazioni differenziali a derivate
parziali (corde vibranti, linee di trasmissione, ecc.)
sistemi 2
ALCUNI ESEMPI
y
Sistema nonlineare statico
x
Sistema lineare dinamico
a costanti concentrate
H(s) = 1/(1+τs)
Sistema lineare dinamico
a costanti distribuite
y(t) = x(t - T)
H(s) = exp(-Ts)
sistemi 3
2. SISTEMI LINEARI E STAZIONARI
Ci occupiamo sopratutto dei sistemi lineari e stazionari (generalmente
dinamici)
perchè sono ottimi modelli di molti sostemi fisici
perchè sono descritti da equazioni differenziali lineari a coefficienti
costanti, agevolmente risolubili
perchè solo ad essi si applicano i metodi delle trasformate di Fourier
e Laplace che ne semplificano grandemente la trattazione
ESEMPIO
nel caso dell’oscillatore armonico
abbiamo l’equazione differenziale
m x(t ) R x (t ) K x(t ) f (t )
Applicando la trasformata di Laplace e trascurando le condizioni iniziali
otteniamo la seguente equazione algebrica nelle grandezze trasformate
ms2X(s) + RsX(s) +KX(s) = F(s)
da cui si ricava immediatamente la trasformata dello spostamento in
funzione della trasformata delle forza applicata
X(s) = [ms2 + Rs + K]-1 F(s)
L’andamento del segnale d’uscita x(t) nel dominio del tempo si ottiene
antitrasformando la relazione precedente, per un dato ingresso f(t) con
trasformata F(s).
sistemi 4
x(t)
sistema
X(s
)
y(t)
Y(s)
Il comportamento ingresso-uscita dei sistemi lineari e stazionari è descritto
completamente da una delle seguenti funzioni:
risposta impulsiva h(t)
risposta a una eccitazione costituita da una funzione delta unitaria
x(t) = (t) y(t) = h(t)
funzione di trasferimento H(s)
rapporto fra le trasformate del segnale d’uscita e d’ingresso
H(s) = Y(s)/X(s)
Per l’oscillatore armonico: H(s) = X(s)/F(s) = 1/(ms2 + Rs + K)
Legame fra le due funzioni: all’eccitazione impulsiva x(t) = (t)
corrisponde la trasformata X(s) = 1
pertanto la trasformata dell’uscita è Y(s) = H(s)
Quindi la funzione di trasferimento H(s) rappresenta la trasformata di
Laplace della risposta impulsiva h(t).
Vantaggio dell’impiego delle funzioni di trasferimento nella trattazione dei
sistemi costituiti da più sottosistemi disposti in cascata: la funzione di
trasferimento totale è il prodotto delle funzioni dei sottosistemi:
H(s) = H1(s) H2(s)... Hn(s)
X(s)
H1(s)
H2(s)
Hn(s)
Y(s)
sistemi 5
funzioni di trasferimento
sono funzioni reali della variabile complessa
s = j +
funzioni razionali fratte di s per i sistemi a costanti concentrate,
caratterizzate allora da un numero finito di singolarità (poli e zeri)
funzioni trascendenti di s per i sistemi a costanti distribuite
Calcolando H(s) alla frequenza angolare (cioè per s = j) si ottiene un
numero complesso
il modulo rappresenta l’amplificazione
la fase rappresenta lo sfasamento
che subisce un segnale armonico di pulsazione applicato in ingresso
H(j) rappresenta dunque la risposta in frequenza del sistema
risposta impulsiva
per sistemi fisicamente realizzabili si ha
h(t) = 0 per t<0
per sistemi stabili (BIBO) deve essere
h() = 0
per sistemi statici si ha una funzione delta nell’origine
Permette il calcolo diretto della risposta y(t) a una eccitazione qualsivoglia
x(t) usando l’integrale di convoluzione
t
0
y (t ) h(t ) x( ) d h( ) x(t ) d
(estremi d’integrazione per sistemi causali, altrimenti fra - e +)
Tale operazione è molto usata nel tempo discreto, dove gli integrali si
riducono a sommatorie, ma generalmente sconsigliata nel tempo continuo
(usando le trasformate, la convoluzione corrisponde a un semplice prodotto)
L’integrale nel tempo della risposta impulsiva h(t) rappresenta la risposta
al gradino unitario (risposta indiciale, step response), da cui si ricavano il
tempo di salita, il ritardo e altre grandezze caratteristiche.
sistemi 6
FILTRI
La risposta in frequenza H(j) e’ una funzione continua di
Ha grande importanza il suo andamento asintotico per
0 cioè la risposta in continua
cioè la risposta alle alte frequenze
La dipendenza dalla frequenza del modulo di H(j) di un sistema ne
definisce le proprietà filtranti.
Si hanno così sistemi passabasso, passaalto, passabanda, eliminabanda
Particolare interesse hanno i sistemi passabasso, per esempio 1/(1+j) e i
sistemi passabanda risonanti.
Le risposte in frequenza di questi ultimi sono caratterizzate dalla presenza
di un denominatore che si scrive usualmente nella forma
1 + jQ –
che alla risonanza si riduce a jQ)
oppure
+ jo/Q – 2
dove Q rappresenta il fattore di merito, che definisce la larghezza di banda
attorno alla risonanza (Q = ), per Q>>1.
La risposta alla risonanza è dunque direttamente proporzionale a Q.
sistemi 7
3. SEGNALI CASUALI NEI SISTEMI LINEARI E STAZIONARI
x(t)
y(t)
H(j)
Sxx()
Syy()
Teorema fondamentale
se il segnale d’ingresso x(t) è un segnale casuale con spettro Sxx(), lo
spettro del segnale d’uscita y(t) è:
Syy() = |H(j)|2 Sxx()
Si dimostra esprimendo l’autocorrelazione dell’uscita in termini di segnali
espressi con l’integrale di convoluzione, e applicando poi la trasformata di
Fourier a quanto si ottiene.
ESEMPIO
Filtro passabasso RC con costante di tempo to e funzione di trasferimento
H ( j )
1
1 j to
eccitato da rumore bianco con spettro Sxx().
Lo spettro d’uscita è:
S yy ( )
S xx ( )
1 2 to2
Se lo spettro d’ingresso è costante (rumore bianco), l’autocorrelazione
dell’uscita si ottiene immediatamente antitrasformando:
R yy ( )
S xx
exp
2 to
to
da cui per =0 si ha la varianza 2 = Sxx/2to
sistemi 8
Assai meno immediata è l’espressione dell’autocorrelazione dell’uscita in
funzione di quella dell’ingresso e della funzione di trasferimento (o della
risposta impulsiva) del sistema.
Considerazioni opposte valgono nel caso dei sistemi nonlineari (in
particolare sistemi statici), per cui il teorema precedente non vale, e
l’unico approccio sensato di calcolo passa per le autocorrelazioni.
ESEMPIO
Rivelatore quadratico: y(t) = x2(t)
Se il segnale d’ingresso ha media nulla, densità normale e autocorrelazione
Rxx(),
sfruttando la relazione E[x2y2]=E[x2]E[y2] + 2E2[xy], che a sua volta
deriva dalla relazione E[g1(x)g2(y)] = E[g1(x)E[g2(y)|x]], si ha:
Ryy() = E[x2(t+)x2(t)] = E[x2(t+)]E[x2(t)] + 2E2[x(t+)x(t)]
da cui
Ryy() = Rxx2() + 2Rxx2()
e in particolare
Ryy() = 3Rxx2()
Lo spettro dell’uscita si ottiene dal teorema di convoluzione in frequenza
della trasformata di Fourier:
Syy() = 2 Rxx2(0) () + Sxx()*Sxx()/
Dato che l’uscita ha valor medio E[y(t)] = E[x2(t)] = Rxx(0)
si conclude che la varianza dell’uscita è
y2 = E[y2(t)] – E2[y(t)] = 2Rxx2()
sistemi 9
BANDA EQUIVALENTE DI RUMORE
La varianza del rumore all’uscita di un sistema eccitato da rumore si
ottiene calcolando lo spettro d’uscita, antitrasformando tale spettro e poi
calcolando l’autocorrelazione a ritardo zero:
1) Syy() = |H(j)|2 Sxx
2) Ryy() = FT-1[Syy()]
3) 2 = Ryy(0)
Il calcolo è molto abbreviato quando l’eccitazione è a spettro costante
(rumore bianco) e si utilizza la banda equivalente di rumore Bn del
sistema. Allora la varianza d'uscita si calcola semplicemente così:
2 = Sxx A2 Bn
Bn
1
dove A è il guadagno massimo e
H j d
2
2 A 2
Questa definizione non è generale, ma vale per le funzioni passabasso e
per le funzioni passabanda di tipo risonante, che sono quelle di maggiore
interesse in pratica
ESEMPIO
Sia H(j) = /( + jper cuiil guadagno è A=1.
1
2
Bn
d
2
2 2
2
funzioni di trasferimento
con una costante di tempo
con due costanti di tempo
risonanti (Q>>1) a o
banda di rumore
[Hz]
1/2
1 / 2(1+2)
o / 2Q
banda usuale a 3dB
[Hz]
1 / 2
1 / 2(1+2)
o / 2Q
sistemi 10
SPETTRI INCROCIATI
x(t)
y(t)
H(j)
Sxx()
Syy()
Valgono le seguenti relazioni:
Sxy(j) = H*(j) Sxx()
Syx(j) = H(j) Sxx()
sistemi 11
RUMORE
Distinguiamo innanzitutto il rumore, inteso come fluttuazioni generate da
fenomeni fondamentali della materia, dai disturbi prodotti da altri
fenomeni (effetti dovuti alla rete elettrica o a onde radio, a vibrazioni
acustiche e alla sismicità naturale del terreno, ai raggi cosmici e alla
radioattività naturale, ecc.).
Il rumore, in linea di principio, è ineliminabile. I disturbi possono essere
invece ridotti o eliminati mediante opportune schermature o altri mezzi.
Il rumore si manifesta generalmente nella forma di segnali casuali a spettro
continuo. I disturbi hanno più spesso spettro costituito da righe.
LE TRE CATEGORIE
Rumore termico: fluttuazioni spontanee della materia, quando si trova a
temperatura diversa dallo zero assoluto.
Rumore shot: derivante dalla quantizzazione della carica elettrica; più in
generale è associato a fluttuazioni di numero quando entrano in gioco
“correnti” di particelle discrete.
Rumore 1/f: così chiamato perchè presenta uno spettro con andamento
proporzionale a 1/f con 1. Si manifesta in una estesa varietà di
fenomeni fisici. Costituisce un rompicapo e dunque fonte di diletto e
ragione di vita per gli studiosi del settore.
Il rumore 1/f pone comunque un problema: la divergenza del valore
quadratico medio, a fronte della forma dello spettro. Che misure (infinita
pazienza e buona salute) eseguite su semiconduttori indicano seguire la
legge 1/f fino a 10-5 Hz.
rumore 1
RUMORE SHOT
Studiato da W. Schottky investigando il rumore nei tubi elettronici
(Schroteffekt, effetto mitraglia) nel 1918. Ma è un effetto assai più
generale.
Consideriamo una corrente di particelle che attraversano una barriera a
istanti di tempo casuali (corrente elettrica di cariche elementari che
attraversano la barriera di potenziale di un tubo a vuoto o di una giunzione
pn, ma anche correnti di particelle di altra natura: persone che entrano in
un bar, gocce di pioggia che cadono su una tegola, ecc.).
La corrente media (numero di particelle nell’unità di tempo) è costante:
per una corrente elettrica l’intensità media è
I = q
dove e’ la frequenza media di arrivo e q la carica elementare.
Ma non è costante il numero n di particelle che passano effettivamente in
intervalli di tempo di durata data.
Se la statistica di arrivo segue la legge di Poisson, la probabilità che in un
tempo T arrivino n particelle è:
T n
P ( n)
exp( T )
n!
da cui si ricavano
il valor medio di n
il valore quadratico medio
e quindi la varianza
n = E[n] = nnPn = T
E[n2] = n n2Pn = T + (T)2
n2 = E[(n-E[n])2] = T
Da quest’ultima si ricavano le fluttuazioni della corrente in intervalli di
durata T:
i2 = n2 (q/T)2 = q2/T = qI/T
rumore 2
Osservando direttamente la corrente di particelle, vedremmo una sequenza
di impulsi a tempi casuali (Poissoniani): una sequenza di funzioni delta se
il tempo di passaggio delle particelle è trascurabile rispetto alla velocità di
risposta dello strumento.
Osserviamola invece usando un filtro di media che sia abbastanza lento
perchè la sua uscita sia la somma pesata dell’effetto di un gran numero di
impulsi, cioè con risposta impulsiva lunga rispetto al tempo medio fra due
impulsi.
Per esempio un filtro con risposta impulsiva rettangolare di durata T e
ampiezza 1/T, e dunque con risposta in frequenza
H ( j )
sin(T 2)
exp( j T 2)
(T 2)
Vogliamo ricavare lo spettro Sii della corrente d’ingresso, che assumiamo
costante (impulsi brevissimi).
Lo spettro d’uscita S() è evidentemente:
S() = |H(j)|2 Sii
Integrando il quale si ottiene la varianza d’uscita: i = Sii/T
Uguagliando con l’espressione precedente (i2 = qI/T) si ottiene infine:
Sii = qI
Osservazioni:
- a spettro costante corrisponde l’assurdo di varianza infinita per il
processo originale. Ma in realtà non è così perchè la velocità di transito è
finita e dunque lo spettro ha un limite in frequenza (approssimativamente
pari al reciproco del tempo di transito delle particelle)
- il risultato ottenuto ha validità generale (non dipende dal particolare filtro
di osservazione)
rumore 3
ESEMPIO
Diodo a giunzione pn, governato dalla legge I = Is (exp(qV/kT) –1)
Nella giunzione in corto (tensione V=0) la corrente I è nulla, sicchè non
c’è rumore shot.
Errore!
La corrente totale è nulla in media, per effetto dell’equilibrio fra due
correnti di uguale intensità e segni opposti: Is e -Is
A ciascuna di queste correnti è associato effetto shot,
pertanto lo spettro totale delle fluttuazioni di corrente è:
Sii = 2qIs
e così risulta sperimentalmente.
E’ affascinante osservare che a questo stesso risultato (per I=0) si arriva
calcolando il rumore termico del diodo:
la cui resistenza differenziale, dall’equazione di Shockley, è r = kT/q(I+Is)
Pertanto, calcolando lo spettro del rumore termico di corrente per I=0 si
ottiene:
Sii = 2kT/r = 2kT (qIs/kT) = 2qIs
rumore 4
RUMORE SHOT MECCANICO
Mechanical shot noise induced by creep .... Phys. Lett. A (1997) pag.21
La denominazione di rumore shot viene applicata anche nel caso di
fenomeni meccanici, come l’allungamento di un filo (sotto carico) prodotto
da fenomeni di cedimento (deformazione permanente)
Qui l’interesse riguarda le sospensioni di parti di rivelatori gravitazionali,
dove la componente continua dello spostamento (lenta deriva) viene
compensata da un sistema di controllo, mentre la parte variabile può
produrre effetti indesiderati sul segnale osservato, simulando la risposta a
determinati eventi astrofisici.
La legge di crescita della lunghezza l(t) del filo viene così espressa:
l l l ns (t )
dove l è la costante di rilassamento del filo e ns(t) è un rumore shot: una
sequenza di impulsi di forma esponenziale (s) con valore integrato qs
(glitch size) che occorrono a istanti ti con distribuzione di Poisson e
frequenza media .
Lo spettro del rumore ha una delta all’origine - allungamento medio nel
tempo, di cui non ci occupiamo - e un andamento Ss() = qs2 /(1+2s2),
che rappresenta la parte variabile. Dall’equazione differenziale precedente
si ricava lo spettro delle fluttuazioni della lunghezza del filo
Sl() = Ss()/2(1+2s2)
Lo spettro del rumore di spostamento della massa sospesa al filo si calcola
infine rappresentando il sistema come un oscillatore armonico smorzato
eccitato dalle anzidette variazioni di lunghezza
nei fili considerati (esperimento VIRGO) si stima
qs=10-10 m
= qualche unità al giorno
rumore 5
RUMORE TERMICO
L’origine dello studio del rumore termico risale al lavoro di Einstein del
1905 sulla teoria del moto Browniano.
In seguito Langevin (1908) propone un metodo, con cui ritrova i risultati di
Einstein, basato sull’introduzione di una forza casuale che agisce sulle
particelle che manifestano moto Browniano.
Nel fascicolo di luglio 1928 di Physical Review troviamo
due lavori fondamentali riguardanti il rumore elettrico di origine termica
J.B. Johnson (Thermal Agitation of Electricity in Conductors) riferisce
sui risultati sperimentali di misure di rumore termico su resistori,
introducendo una formula universale
H. Nyquist (Thermal Agitation of Electric Charge in Conductors)
calcola il rumore termico in base ai principi della termodinamica e della
meccanica statistica, in accordo con gli esperimenti di Johnson.
Formula di Johnson-Nyquist
Lo spettro di potenza della f.e.m. ai terminali di un conduttore elettrico di
resistenza R, dovuta all’agitazione termica dei portatori, è:
Svv() = 2 k T R
[volt2/hertz]
dove T è la temperatura del conduttore
(si tratta di uno spettro bilatero, in forma unilatera lo spettro è 4kTR)
questa formula venne ricavata in base a considerazioni termodinamiche,
utilizzando il principio di equipartizione, ma si può ricavare anche con
un approccio corpuscolare, basato sulla conoscenza della distribuzione
delle velocità degli elettroni
nonostante le apparenze.... la varianza totale non diverge
rumore 6
In effetti lo spettro non si mantiene costante con la frequenza:
- una spiegazione classica è che fra i terminali di qualsiasi conduttore reale
c’è sempre una capacità elettrostatica, che dunque limita la banda
- introducendo la correzione quantistica la formula si modifica così:
Svv ( )
2 R
exp
1
k
T
coincidendo con la precedente per frequenze sufficientemente basse, cioè
per k T (notate che la correzione interviene prima alle basse
temperature).
Considerando lo spettro del rumore di corrente attraverso un resistore in
cortocircuito si trova
Sii() = 2 k T R
In generale, lo spettro del rumore di tensione fra due terminali di un
circuito elettrico che presenta impedenza Z(j) è
Svv() = 2 k T Re[Z(j)]
purchè il circuito comprenda soltanto elementi passivi (resistori,
condensatori, induttori e trasformatori) che si trovino tutti a una stessa
temperatura T (gli elementi attivi sono vietati, perchè fuori dall’equilibrio
termodinamico).
Quanto sopra suggerisce che un resistore rumoroso possa rappresentarsi
con la disposizione in serie di un resistore ideale (non rumoroso) e di un
generatore di tensione di rumore con spettro 2kTR (se soggetto soltanto a
rumore termico, altrimenti lo spettro avrà un’altra espressione).
Cosa avviene per due resistori in serie? In parallelo?
Quando si trovano alla stessa temperatura? A temperature diverse?
rumore 7
ESEMPIO
Condensatore in parallelo a un resistore
Lo spettro della tensione ai terminali del condensatore (e del resistore) si
può calcolare in vari modi, per esempio:
- come prodotto dello spettro di potenza del generatore di tensione di
rumore per il modulo quadro della funzione di trasferimento fra il
generatore e l’uscita:
Svv() = 2 k T R 1/(1 + 2 2) = 2 k T R / (1 + 2 2)
- in base alla parte reale dell’impedenza del circuito
Z(j) = R/(1 + j) = R (1 - j)/(1 + 2 2)
ottenendo ancora:
Svv() = 2 k T Re[Z(j)] = 2 k T R / (1 + 2 2)
La varianza della tensione si ottiene integrando lo spettro, o più
semplicemente moltiplicando lo spettro in continua per la banda
equivalente di rumore della funzione di trasferimento, Bn = 1/4
2 = Svv(0)/4 = kT/2C
risultato felicemente in accordo con il principio di equipartizione
(2C/2 = kT/2)
Si noti che
- che questo risultato non dipende
da R e dunque è valido anche per
un condensatore (R)
- che lo spettro del rumore ha valore
in continua proporzionale a R, ma
frequenza di taglio inversamente proporzionale a R, e quindi l’area
sottesa dal suo grafico è costante al variare di R e dipende soltanto da C
rumore 8
RAPPRESENTAZIONE DEL RUMORE NEI CIRCUITI ELETTRICI
Qualsiasi circuito (o elemento di) circuito si rappresenta in generale come
un circuito (o un elemento) ideale (cioè non rumoroso), corredato da
generatori che ne rappresentano esplicitamente il rumore.
Rete a una porta (bipolo): la rappresentazione del rumore richiede
l’aggiunta di un generatore, con spettro assegnato
rappresentiamo la rete con la legge
V = ZI + Vn
oppure
I = YV + In
dove Vn e In sono opportuni generatori di rumore
I
I
bipolo
rumoroso
+
V
V
bipolo non
rumoroso
-
+
V
-
La rappresentazione del rumore in una rete a due porte richiede due
generatori di rumore.
Per esempio (rappresentando la rete con i parametri Z)
V1 = Z11 I1 + Z12 I2 + Vn1
V2 = Z21 I1 + Z22 I2 + Vn2
con due generatori di tensione di rumore disposti in serie alle due porte
(ma vi sono vari altri modi di collegare i generatori di rumore, di tensione
o di corrente)
Così facendo il rumore della rete a due porte è caratterizzato dagli spettri
di potenza dei due generatori e dallo spettro incrociato (che ne rappresenta
le proprietà di correlazione spettrale): 4 funzioni reali di
(che si riducono a due in assenza di correlazione fra i due generatori)
rumore 9
Il rumore di una rete a due porte (per esempio un amplificatore) si
rappresenta di solito con due generatori disposti all’ingresso:
un generatore di tensione in serie e uno di corrente in parallelo
con spettri di potenza (autospettri e spettro incrociato) assegnati.
Vn
In
rete
priva di
rumore
TEMPERATURA DI RUMORE DI UNA RETE A UNA PORTA
Se una rete è puramente passiva sappiamo calcolare il rumore in base alla
parte reale della sua impedenza, ma solo se tutti gli elementi dissipativi si
trovano a una stessa temperatura T, che in tal caso assumiamo come
temperatura equivalente di rumore della rete:
Teq = Svv()/(2 kRe[Z(j)]) = T
Se gli elementi dissipativi si trovano a temperature diverse, possiamo
ancora calcolare lo spettro Svv() ai terminali della porta:
questo sarà la somma dei contributi dei generatori di rumore associati ai
vari elementi, ciascuno moltiplicato per il modulo quadro della funzione di
trasferimento da quel generatore alla porta d’uscita della rete.
In tal caso avremo:
Teq = Svv()/(2 kRe[Z(j)])
Un calcolo analogo può farsi anche per le reti attive, questa volta tenendo
conto anche dei contributi degli elementi attivi, ciascuno rappresentato con
i due generatori di rumore visti sopra.
rumore 10
ESEMPIO
Il caso della resistenza fredda
Ovvero calcolo della temperatura equivalente di rumore all’ingresso
invertente (terra virtuale) di un amplificatore operazionale.
Consideriamo un amplificatore operazionale con un resistore R disposto in
retroazione fra l’uscita e l’ingresso invertente. L’impedenza d’ingresso a
tale porta (trascurando quella propria dell’amplificatore stesso,
generalmente assai elevata) si calcola con il teorema di Miller
Zin(j) = R/(1+A(j))
se l’amplificazione dell’operazionale è –A(j).
Per esempio se a bassa frequenza assumiamo reale il guadagno con
A = 102 e assumiamo R = 106 ohm, otteniamo: Zin R/A = 104 ohm.
Il calcolo dello spettro di rumore richiede di valutare e sommare i
contributi del rumore termico del resistore e dei due generatori di rumore
(di tensione e di corrente) associati all’amplificatore, con spettri Svn ed Sin,
che per semplicità supponiamo bianchi e scorrelati.
In uscita si ha approssimativamente lo spettro 2kTR + SvnA2 + SinR2
e dunque riportandolo in ingresso si ha:
Svv Svn + (2kTR + SinR2)/A2
La temperatura equivalente di rumore della rete è dunque:
Teq
Svv
A Svn
R Sin
T
2 k Zin
A
2 k R
2 k A
che per un amplificatore privo di rumore si ridurrebbe a T/A = 0.3 K.
Con valori realistici degli spettri di rumore di un buon amplificatore
(1 nV/Hz, 10 fA/Hz, cioè Svn = 10-18 V2/Hz, Sin = 10-28 A2/Hz),
A = 102, R = 106 ohm e T =300 K si ha,
evidenziando i tre contributi:
Teq (0.3 + 3 + 0.03) K
rumore 11
LA RESISTENZA DI RUMORE
Il rumore di una rete a una porta può essere caratterizzato anche in termini
di resistenza equivalente di rumore.
Una grandezza che evidentemente non si misura con l’ohmetro!
La resistenza di rumore di una rete con spettro Svv() è
Rn() = Svv()/(2kT)
assumendo di solito (per convenzione) T =300 K
Tale grandezza è generalmente una funzione della frequenza.
Per una rete passiva in equilibrio a 300 K, essa coincide evidentemente
con la parte reale dell’impedenza.
Nel caso delle reti a due porte questo tipo di rappresentazione è ancora
applicabile, non è sufficiente.
Dato che si hanno due generatori di rumore, alla resistenza di rumore (che
esprime il rumore di tensione e va disposta in serie alla porta d’ingresso)
occorre aggiungere una conduttanza di rumore, che rappresenta il rumore
di corrente e va disposta in parallelo alla porta d’ingresso.
E anche una impedenza (o ammettenza) di correlazione nel caso di
correlazione fra i due generatori.
rumore 12
CARATTERIZZAZIONE DEL RUMORE NELLE RETI A DUE PORTE
Calcoliamo lo spettro totale del rumore alla porta d’ingresso di una rete a
due porte. Dal quale si può ottenere immediatamente il rumore d’uscita
tenendo conto del guadagno, più generalmente della funzione di
trasferimento, della rete.
Nel calcolo che segue assumiamo che
il rumore della rete sia rappresentato da due generatori di rumore, di
tensione e di corrente, con spettri Svv() e Sii(), collegati alla porta
d’ingresso
che questi generatori non siano correlati
e che la porta sia terminata su una sorgente d’impedenza
Zs(j) = Rs() + jXs() che si trovi alla temperatura Ts
Vn
Zs(j)
In
rete
priva di
rumore
Trascurando l’impedenza d’ingresso Zin(j) della rete
(senza perdita di generalità per quanto ci interessa dato che questa non
introduce rumore e che il suo effetto sullo spettro totale sarà solo quello di
attenuarlo secondo il fattore |1 + Zs/Zin|-2 ), si ottiene:
Stt() = Svv() + Sii()|Zs()|2 + 2kTs Re[Zs(j)] =
= Svv() + Sii() [Rs() + Xs()2] + 2kTs Rs()
rumore 13
Evidentemente il rumore è minimo, pari a quello del solo generatore di
tensione, quando l’impedenza della sorgente si annulla. Poi aumenta fino a
diventare proporzionale a |Zs()|2
Introduciamo la grandezza, chiamata impedenza di rumore
(nulla a che vedere con la resistenza di rumore vista prima)
che risulterà utile in quanto segue
Z n ( )
Svv ( )
Sii ( )
e che è reale dato che gli spettri sono reali.
IL FATTORE DI RUMORE
Le prestazioni di rumore di una rete a due porte, in particolare di un
amplificatore, sono generalmente basate sulla valutazione del rumore che
essa introduce “in più” rispetto al rumore termico della sorgente.
Che dunque non può essere una reattanza pura.
E che si assume convenzionalmente trovarsi alla temperatura fissa
To = 290 K
(cosa spesso assai poco significativa in pratica)
Una grandezza, in realtà una funzione della frequenza, molto significativa
allo scopo anzidetto, è il
fattore di rumore (cifra di rumore, noise factor) della rete,
che è definito in vari modi equivalenti, fra cui:
rapporto fra la potenza del rumore totale e quella del solo rumore
termico della sorgente all’uscita della rete (o all’ingresso della rete, ma
a valle dei generatori di rumore, che è lo stesso)
rapporto fra il rapporto segnale/rumore spettrale alla sorgente e quello
all’uscita della rete
rumore 14
Eseguendo il calcolo all’ingresso della rete (sempre nel caso semplificato
di assenza di correlazione fra i due generatori di rumore) si ha:
F() = Stt()/(2kToRs()) =
= 1 + [Svv() + Sii()(Rs()2 + Xs()2)]/(2kToRs())
Per una rete con caratteristiche di rumore date (spettri Svv() e Sii())
ha interesse individuare il campo dei valori dei parametri della
sorgente (Rs e Xs) per cui il fattore di rumore è sufficientemente basso e in
particolare i valori per cui tale grandezza è minima.
Quest’ultima condizione si determina uguagliando a zero le derivate del
fattore di rumore rispetto a Xs ed Rs, ottenendo così:
Xs = Xso = 0
Rs = Rso = (Svv/Sii)1/2 = Zn
per cui si ha
F = Fmin = 1 + (SvvSii)1/2 /kTo
Il fattore di rumore minimo è dunque indipendente dalle proprietà della
sorgente (a parte la temperatura standard di 290 K)
ed è tanto minore (cioè prossimo all’unità) quanto minore è il rapporto fra
l’energia di rumore della rete, cioè (SvvSii)1/2 (si tratta di joule)
e l’energia termica.
Il fattore di rumore si può esprimere in generale anche nella seguente
forma, assai significativa:
F = Fmin + [(Rs – Rso)2 + (Xs - Xso)2)]/(2kToRs)
cioè in funzione degli scostamenti dei parametri della sorgente da quelli
ottimali.
rumore 15
Considerando una sorgente puramente resistiva (Xs=0) e occupandosi
dell’andamento del fattore di rumore con la frequenza, si tracciano i
contorni di rumore nel piano frequenza, resistenza
cioè i luoghi dove il fattore di rumore (generalmente espresso in decibel)
assume valori costanti.
Questo permette di individuare immediatamente le regioni del piano dove
il fattore di rumore è inferiore a un valore dato (per esempio 3 dB cioè 2),
la cui estensione è un indice importante della versatilità di un
amplificatore.
resistenza
3 dB
1 dB
3 dB
frequenza
Per esempio il preamplificatore commerciale PAR 113, nella regione delle
frequenze attorno al kHz, presenta F 3dB per resistenze di sorgente fra
circa 10 k e 100 M.
In genere un limite a bassa frequenza è dato dal rumore 1/f.
Un limite ad alta frequenza è dato dalla diminuzione del guadagno
dell’amplificatore.
rumore 16
TEMPERATURA DI RUMORE
Meno usata, sebbene particolarmente significativa, è la caratterizzazione
del rumore di una rete a due porte in termini di temperatura di rumore
Tn. Che è definita come la temperatura a cui va portata la sorgente perchè
il rumore all’uscita della rete si raddoppi rispetto a quando la sorgente si
trova allo zero assoluto.
(ciò svincola dal riferimento alla temperatura di 290 K insito nella
definizione del fattore di rumore)
Si ricava la seguente relazione fra la temperatura di rumore e il fattore di
rumore:
Tn = To (F - 1)
In realtà spesso si considera come temperatura di rumore quella che in
effetti è la temperatura minima di rumore, cioè quella che si ottiene
quando la sorgente è ottimizzata (cioè Rs=Rso, Xs=Xso):
Tn min = To (Fmin - 1)
E allora si ha
Tn min
Svv Sii
k
che mostra come la temperatura di rumore sia una grandezza fisicamente
più significativa di altre, in quanto rappresenta sostanzialmente l’energia di
fluttuazione all’ingresso della rete.
Si possono realizzare dispositivi con temperatura di rumore piccola a
piacere? No.
Heffner ha dimostrato, in base al principio di indeterminazione, che la
temperatura di rumore di qualsiasi oggetto ha il seguente limite inferiore:
Tn
ln( 2)
k
rumore 17
DISPOSITIVI A BASSO RUMORE
tabella indicativa delle prestazioni di rumore di alcuni dispositivi
(alla frequenza di 1 kHz)
dispositivo
transistore bipolare
transistore JFET
JFET raffreddato
operazionale OP27
DC-SQUID
Tn [K]
20
0.1 - 1
15 m
40
1-10
Rso []
10 - 100 k
1M
1M
7k
In genere gli spettri di rumore dei vari dispositivi sono costanti in una
regione intermedia di frequenza, in cui dominano effetti a larga banda,
termici (rumore del canale dei FET e della resistenza di base dei BJT) e
shot (corrente di gate dei FET e correnti di giunzione nei BJT).
A bassa frequenza intervengono contributi 1/f (rumore di corrente nei BJT
e rumore di tensione dei FET). Ad alta frequenza il rumore riportato in
ingresso generalmente aumenta perchè diminuisce il guadagno, ma anche
per effetti di accoppiamenti capacitivi interni (come nei FET).
E’ spesso possibile ridurre il rumore dei dispositivi semplicemente
raffreddandoli, ma non al di sotto della temperatura alla quale smettono di
funzionare. Questa tecnica è poco utile con i BJT, il cui guadagno in
corrente diminuisce abbastanza rapidamente al calare della temperatura.
Più utile nel caso dei JFET, che hanno una temperatura ottimale di lavoro
fra 100 e 150 K.
rumore 18
PROGETTAZIONE A BASSO RUMORE
La chiave è la scelta del dispositivo d’ingresso, che determina le
prestazioni di rumore del circuito.
Queste non saranno mai migliori di quelle del dispositivo.
Il problema, casomai, è di non peggiorarle troppo.
La scelta del dispositivo è basata sulla regione di frequenza d’interesse e
soprattutto sui valori della resistenza di sorgente. Per esempio, transistori
bipolari per basse resistenze di sorgente, JFET per resistenze più alte.
Si noti che un dispositivo può essere adattato alla sorgente (noise
matching) per minimizzare il fattore di rumore (e la temperatura di
rumore) in vari modi.
Usando un trasformatore (purchè questo non introduca rumore
apprezzabile, cioè abbia perdite bassissime, e sia ben schermato)
Disponendo più dispositivi in parallelo. In tal caso il rumore d’ingresso
viene alterato: il rumore di tensione diminuisce e quello di corrente
aumenta. n dispositivi identici con spettri Svv ed Sii equivalgono a un
unico dispositivo con spettri Svv/n ed nSii e dunque con impedenza di
rumore n volte minore.
Il dispositivo va poi inserito in un circuito, in particolare polarizzandolo in
modo che presenti il minimo rumore (e che dissipi potenza tale da non
provocare aumenti di temperatura, con ovvie conseguenze sul rumore).
Il primo stadio dovrà poi avere guadagno sufficiente a rendere trascurabile
il contributo del rumore degli stadi successivi.
Queste esigenze di basso rumore conducono spesso a scelte abbastanza
diverse dall’usuale: resistori di polarizzazione di altissimo valore (10 G)
per non degradare il rumore di corrente, resistori di reazione serie di
bassissimo valore (1 ohm) per non degradare il rumore di tensione,
dispositivi polarizzati per correnti intense (da cui dipende il guadagno e il
rumore) ma tensioni molto basse per ridurre la dissipazione VI, ecc.
E attenzione ai condensatori di accoppiamento, perché le loro perdite
introducono rumore!
rumore 19
Un caso interessante: l’amplificatore di carica
Questa è la denominazione ( a rigore impropria) degli amplificatori usati
per misurare la carica elettrica rilasciata in un rivelatore da una particella o
da una radiazione ionizzante.
Si tratta infatti di convertitori carica-tensione.
Lo schema base è un amplificatore ad alto guadagno A (per esempio un
operazionale) controreazionato con un condensatore CF, il cui ingresso è
collegato al rivelatore.
Se questo produce un breve impulso di corrente, di carica totale Q,
la tensione d'uscita dell'amplificatore (invertente) si porta rapidamente alla
tensione: V = - Q/CF
che non dipende nè dalla capacità del rivelatore, nè dalla capacità
d’ingresso dell’amplificatore, nè da cavi e altre capacità parassite, se
queste restano ben inferiori a CF/A (effetto Miller).
Di solito non interessa un gradino, ma un impulso breve (di ampiezza
proporzionale a Q), in modo da poter osservare altri impulsi che si
susseguano con una certa cadenza. Per questo l’amplificatore di carica è
generalmente seguito da un formatore d’impulsi, che spesso ha funzione di
trasferimento H(s) = s/(1+s)2
La risoluzione in carica (e dunque in energia della particella) è limitata
evidentemente dal rumore dell’amplificatore. Si esprime generalmente in
unità di ENC (equivalent noise charge), in valore efficace (rms).
Se gli spettri di rumore dell’amplificatore sono bianchi nella banda di
osservazione (determinata dal formatore), allora si ha:
ENCeff
e
qe
Svn CT 2
S
in
8
8
dove CT è la capacità totale del nodo d’ingresso (inclusa CF).
rumore 20
SISTEMI MECCANICI
Nel 1951 Callen e Welton generalizzano la legge di Johnson-Nyquist sul
rumore termico al caso di un sistema fisico arbitrario, purchè lineare, per
cui sia definita una impedenza generalizzata come rapporto fra causa ed
effetto: teorema fluttuazione-dissipazione.
Il rumore (fluttuazione) viene così associato a qualsiasi dissipazione del
sistema. Lo spettro del rumore si calcola anche qui in base alla temperatura
e alla parte reale dell’impedenza (esprimendo gli spettri e le impedenze
nelle unità di misura appropriate).
In questo una guida preziosa è costituita dalle analogie, in particolare dalle
analogie di Maxwell fra sistemi elettrici e meccanici. La più usata di
queste stabilisce le seguenti corrispondenze
forza (newton)
spostamento (metri)
velocità (m/s)
massa (kg)
attrito (kg/s)
costante elastica (kg/s2)
tensione elettrica (volt)
carica elettrica (coulomb)
corrente elettrica (ampere)
induttanza (henry)
resistenza elettrica (ohm)
1/capacità elettrica (farad-1)
In tal modo l’impedenza meccanica Zm(j)si misura in unità di kg/s e lo
spettro del rumore di forza si esprime come
Sff() = 2 k T Re[Zm(j)
in unità di N2/Hz
Ricordiamo che esistono altre analogie. Una di queste riguarda i sistemi
termici, facendo corrispondere la temperatura al potenziale elettrico, il
flusso di calore alla corrente elettrica, la capacità termica alla capacità
elettrica, ecc.
rumore 21
ESEMPIO
Calcolo del rumore di velocità nell’oscillatore armonico smorzato
m x(t ) R x (t ) K x(t ) f (t )
Per calcolare il rumore introduciamo il generatore di rumore di forza,
associato all’elemento dissipativo secondo la formula:
Sff() = 2 k T R
Lo spettro del rumore di velocità si ottiene moltiplicando Sff per il modulo
quadro della funzione di trasferimento fra forza e velocità
H(j) = (jm + R + K/j)-1
con pulsazione di risonanza o=(K/m)1/2, fattore di merito Q=om/R e
guadagno massimo H(j) =1/R.
Si ha pertanto
S xx S ff | H ( j ) |2
e quindi lo spettro del rumore di velocità è uno spettro risonante con picco
Sff/R2 = 2kT/R a o
Poiché la banda di rumore è Bn = o/2Q, la varianza della velocità è
2 = Sff A2 Bn = 2kTR (1/R2) (R/2m) = kT/m
in accordo con il principio di equipartizione
(m2 /2 = kT/2)
rumore 22
IMPIEGHI UTILI DEL RUMORE
(M.S.Gupta, Proc.IEEE, 996, 1975)
1) Misure di costanti fisiche:
costante di Boltzmann dal rumore termico
carica dell’elettrone dal rumore shot
2) Misure di temperatura (Johnson noise termometry)
anche a temperature relativamente basse, usando strumentazione
con temperatura di rumore sufficientemente bassa (con SQUID si è
ottenuta una temperatura di rumore di 1 mK)
3) Misure di parametri di dispositivi a semiconduttori
4) Misure elettriche: resistenza elettrica, perdite di condensatori,
larghezza di banda di circuiti, funzioni di trasferimento di sistemi
(come segnale di eccitazione)
5) Valutazione dell’affidabilità di dispositivi
6) Strumento concettuale:
scatola nera di Slepian, motore di Penfield, ecc.
R2 = LC
R
L
R
R
C
Ma vediamo brevemente altre due applicazioni molto interessanti
rumore 23
DITHER Introdotto da Bennet (Bell Telephone) nel 1948:
consiste nel sommare rumore a un segnale quantizzato per migliorarne la
qualità, più precisamente la risoluzione ottenibile.
Consideriamo un segnale binario, per esempio la spia luminosa che
segnala che il serbatoio dell’auto è in riserva. Se l’auto è ferma, la luce è
permanentemente accesa oppure spenta. Se l’auto è in moto, può darsi che
la luce si accenda e spenga continuamente. Integrando a occhio si può
stabilire se siamo lontani dalla riserva (sempre spenta); se siamo prossimi a
entrare in riserva (poco accesa e molto spenta); se siamo già entrati in
riserva, ma c’è ancora carburante (molto accesa e poco spenta); se siamo
pesantemente in riserva (sempre accesa).
Questo principio è sfruttato nell’elaborazione delle immagini:
anche usando dati a bassa risoluzione (pixel codificati con pochi bit) si
possono ottenere immagini in cui la scala dei grigi è tale da non avvertire
più l’effetto di quantizzazione.
E anche nei convertitori A/D del tipo delta-sigma, nei quali la conversione
è affidata a un comparatore (1 bit), ma ripetuta un grandissimo numero di
volte e seguita da integrazione del risultato per ottenere una risoluzione
finale corrispondente ad un numero di bit anche assai alto (16-20).
RISONANZA STOCASTICA
Concetto introdotto da Benzi nel 1981, che ha trovato applicazioni in varie
scienze ed è trattato ampiamente in un recente lavoro di rassegna (Rev.
Mod. Phys. gennaio 1998)
Una particella, fortemente smorzata e soggetta a fluttuazioni, si trova in un
potenziale simmetrico a doppia buca: per metà del tempo si troverà in uno
stato, per metà nell’altro.
Che succede in presenza di una forza periodica, anche debolissima (cioè di
per sè largamente insufficiente a superare la barriera? I salti fra l’uno e
l’altro stato risultano sincronizzati, con un effetto di forte amplificazione
della forza.
rumore 24
Bibliografia
L.E. Franks, Signal theory, Prentice Hall, 1969
A. Papoulis, Probability, Random Variables, and Stochastic Processes,
McGraw Hill, 1991
J.S. Bendat, A.G. Piersol, Random Data – Analysis and Measurement
Procedures, Wiley, 1986
A.D. Whalen, Detection of signals in noise, Academic Press, 1971
Electrical Noise: Fundamentals & Sources, a cura di M. S. Gupta, IEEE
Press, 1977 (raccolta di lavori classici e bibliografia)
A. Van der Ziel, History of Noise Research, in Advances in Electronics
and Electron Physics, vol. 50, pp.351-409.
Selected papers on noise and stochastic processes, a cura di N. Wax,
Dover, 1954
Selected papers on noise in circuits and systems, a cura di M. S. Gupta,
IEEE Press, 1988
G.V. Pallottino, Appunti di elettronica, parte IX, Dipartimento di Fisica
della Sapienza
http://www.phys.uniroma1.it/DipWeb/web_disp/d2/dispense/pallottino/pallo9.pdf