Appendice B
Il Rumore Termico nei Sistemi di
Comunicazione
B.1
Il rumore termico prodotto da un resistore
Collegando un voltmetro molto sensibile ai capi di un resistore reale con resistenza R ohm
(Ω), non soggetto a forze elettromotrici esterne, si osserverebbe che la tensione a vuoto
ai capi del resistore non è identicamente nulla, ma varia rapidamente intorno al valore
zero. Tale fenomeno fisico, detto rumore termico, è dovuto all’agitazione termica degli
elettroni presenti in un conduttore, la quale dà luogo ad un flusso netto di carica non nullo
in funzione del tempo.
Tale variazione della tensione istantanea, presente nel conduttore, sarebbe, in linea di
principio, identicamente nulla solo se esso operasse a temperature pari o prossime allo zero
assoluto (lo zero della scala Kelvin). Pertanto ogni circuito elettrico è affetto da tale tipo
di rumore. Oggetto della presente appendice è quello di fornire un modello matematico
per la caratterizzazione di questo fenomeno fisico.
A causa della grande quantità di elettroni presenti in un conduttore, il rumore termico
appare come un fenomeno completamente impredicibile, che richiede un approccio di tipo
statistico in fase di modellizzazione. La meccanica quantistica afferma che la tensione
w(t), all’istante t, ai capi di un resistore di resistenza R e temperatura T , in gradi Kelvin
(K), è un processo aleatorio a media nulla e stazionario in senso lato (SSL). Inoltre, in
condizioni di adattamento per il massimo trasferimento di potenza, che si verificano se il
resistore è chiuso su di un carico con impedenza pari ad R, ha la seguente PSD
h|f |
,
Sw (f ) = h|f |
2 e kT − 1
dove h = 6.62 × 10−34 Joule × secondi (J · s) è la costante di Planck e k = 1.38 × 10−23
J/K è la costante di Boltzmann.
103
104
Appendice B. Il Rumore Termico nei Sistemi di Comunicazione
−21
x 10
3.5
3
2
w
S (f) [W/Hz]
2.5
1.5
1
0.5
0
12
13
10
14
10
10
f [Hz]
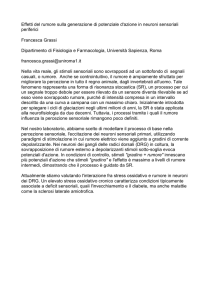
Figura B.1: Densità spettrale di potenza del rumore termico per T0 = 290 K.
In figura B.1 è riportata la funzione Sw (f ) per T0 = 290 K (tale temperatura, prossima
alla temperatura ambiente, è comunemente utilizzata come valore di riferimento): come si
può osservare, la PSD esibisce variazioni molto piccole in un ampio intervallo di frequenze
centrato intorno alla frequenza zero. Quindi il rumore termico è approssimabile in un
ampio intervallo di frequenze tramite una densità spettrale di potenza costante.
|
≪ 1 si può sostituire al termine esponenAl fine di valutare il valore di Sw (f ) per h|f
kT
h|f |
ziale e kT , che compare nell’espressione della densità, il suo sviluppo in serie di Taylor,
calcolato nell’origine e arrestato ai primi due termini, cioè
h|f |
e kT ≃ 1 +
h|f |
,
kT
per
h|f |
≪1
kT
ottenendo
1
kT.
(B.1)
2
Un segnale aleatorio, SSL e a media nulla, la cui PSD sia costante sull’intero asse
delle frequenze è detto bianco per analogia con la luce bianca. Se si approssima il rumore
termico con un rumore bianco, la sua funzione di autocorrelazione è facilmente ricavabile
come l’antitrasformata di Fourier dell’equazione (B.1)
Sw (f ) ≃
Rw (τ ) = F −1 (Sw (f )) =
1
kT δ(τ ),
2
dove con δ(τ ) si è indicato l’impulso di Dirac. Infine, ricorrendo al teorema del limite
centrale, si può dimostrare che w(t) è un processo gaussiano.
È bene evidenziare un aspetto importante riguardo alla caratterizzazione del rumore
termico appena introdotta. Si osservi che un processo aleatorio bianco (cioè con PSD
105
B.2. Temperatura e cifra di rumore di sistemi LTI
costante) non è fisicamente realizzabile, in quanto dovrebbe avere potenza infinita (la
potenza si può ricavare valutando la funzione di autocorrelazione Rw (τ ) per τ = 0).
Tale modello può, tuttavia, essere usato con riferimento alla maggior parte dei Sistemi
di Telecomunicazione, poiché la PSD del rumore termico in ingresso al demodulatore è
costante sulla banda di frequenze del segnale utile. Infatti, l’andamento della PSD del
rumore, per frequenze esterne a quelle della banda del segnale modulato, è ininfluente se
il ricevitore utilizza un filtro passabanda ideale con risposta in frequenza tale da lasciar
passare inalterato il segnale utile e sopprimere le componenti spettrali del rumore al di
fuori di tale banda.
B.2
Temperatura e cifra di rumore di sistemi LTI
Tipici componenti di un sistema di comunicazione come amplificatori e filtri introducono
rumore termico. Per l’analisi ed il dimensionamento di un sistema1 non è fondamentale
caratterizzare le sorgenti di rumore presenti, ma, piuttosto, determinare il livello della densità spettrale di potenza del disturbo in uscita al canale che, come si mostrerà, può tenere
conto anche del rumore introdotto dai successivi stadi a radiofrequenza del ricevitore. A
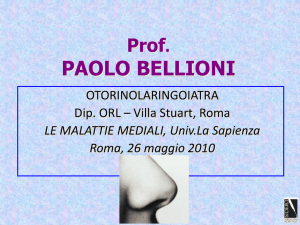
tal fine si consideri il sistema LTI, di risposta in frequenza H(f ), riportato nello schema
a blocchi di figura B.2. Si assuma che le sezioni di ingresso e di uscita del doppio bipolo
siano adattate per il massimo trasferimento di potenza dalla sorgente al carico e che la
PSD del rumore in ingresso al sistema sia pari a kT /2.
Sorgente di
rumore bianco
-
H(f )
doppio bipolo
rumoroso
-
Carico
Figura B.2: Analisi di un sistema LTI in presenza di rumore.
La potenza di rumore in uscita al sistema LTI è data da
Z +∞ 1
Pno =
kT |H(f )|2 df + Pi
−∞ 2
dove Pi è il contributo del doppio bipolo reale al rumore bianco in uscita. Se la risposta
impulsiva del sistema è una funzione reale, allora H(f ) è Hermitiana e, in particolare,
|H(f )|2 è pari, pertanto il precedente integrale può essere riscritto
Z +∞
Pno = kT
|H(f )|2 df + Pi .
0
Siano ora
Hmax , max |H(f )|
f
1
e
Bneq ,
Z
0
+∞
|H(f )|2
df.
2
Hmax
Nel seguito si ipotizza che siano presenti solo sorgenti di rumore bianco.
106
Appendice B. Il Rumore Termico nei Sistemi di Comunicazione
Hmax approssima il modulo della risposta in frequenza del filtro in banda passante, laddove
Bneq è la cosiddetta banda equivalente di rumore monolatera del sistema ovvero la banda
monolatera di un filtro “rettangolare” (con risposta in frequenza pari ad Hmax in banda
passante, identicamente nulla in banda oscura e con bande di transizione di ampiezza nulla)
che trasferisca al carico la stessa potenza di rumore del sistema in esame. È importante
osservare che la banda equivalente di rumore di un filtro con risposta in frequenza H(f )
non coincide, in generale, con la banda a 3 dB del filtro stesso, ma è tipicamente più
grande. Ad esempio, per un semplice filtro di tipo passa-basso, quale il filtro RC con
banda a 3 dB B3 , la banda equivalente di rumore vale Bneq = π2 B3 ; tuttavia, per molti
filtri di interesse nelle applicazioni, ovvero sufficientemente selettivi in frequenza, l’una
rappresenta una ragionevole approssimazione dell’altra.
La potenza di rumore in uscita al sistema può essere pertanto riscritta in termini delle
quantità appena definite e si ha:
2
Pno = kT Hmax
Bneq + Pi .
(B.2)
2
Nel seguito il guadagno di potenza disponibile del sistema Hmax
sarà anche indicato con
G. La precedente espressione può inoltre essere riscritta come
!
Pi
Pno = kGBneq T +
.
kGBneq
Se si pone
Te =
Pi
,
kGBneq
la potenza di rumore complessiva in uscita al filtro H(f ) diventa
Pno = k(T + Te )GBneq .
Te è detta temperatura equivalente di rumore del doppio bipolo ed è, in generale, una
temperatura fittizia.
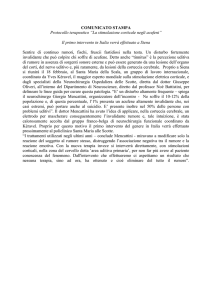
Pertanto si può concludere che un sistema reale, tale cioè da generare rumore termico
al suo interno, può essere trattato come un sistema ideale (non rumoroso) a patto di aggiungere al segnale di ingresso una sorgente di rumore bianco con temperatura equivalente
di rumore pari a Te come mostrato nella figura B.3.
Sorgente di
rumore bianco
H(f )
(non rumoroso)
6
- j
-
-
Carico
1
kTe
2
Figura B.3: Modello equivalente per un sistema LTI reale.
Per caratterizzare il comportamento di un doppio bipolo si può fare riferimento anche
alla cifra di rumore che si denota con F , e si definisce come il rapporto tra la potenza in
B.2. Temperatura e cifra di rumore di sistemi LTI
107
uscita al sistema reale quando il segnale in ingresso è una realizzazione di rumore bianco
con PSD di livello pari a kT0 /2 e la potenza che si misurerebbe se il sistema fosse ideale,
cioè
kT0 GBneq + Pi
F =
.
kT0 GBneq
È immediato verificare che F può essere riscritta come segue
F =1+
Te
.
T0
La cifra di rumore è spesso indicata in decibel:
F (in dB) = 10 log10 F.
Se si ipotizza che il segnale in ingresso al sistema LTI sia la somma di un contributo di
segnale utile, u(t), e di un contributo di rumore bianco, w(t) con PSD di livello pari a
kT0 /2, e che il sistema lasci passare indistorto il segnale utile, il rapporto segnale/rumore
in uscita al sistema è dato da
SNRo =
dove SNRi ,
Pu
kT0 Bneq
1
Pu
GPu
=
k(T0 + Te )GBneq
1 + Te /T0 kT0 Bneq
può essere interpretato come rapporto segnale/rumore in ingresso
al sistema: è, infatti, il rapporto tra la potenza di segnale utile in ingresso al sistema e la
potenza di rumore nella banda del segnale (se si assume che la banda equivalente di rumore
del sistema sia una misura della sua banda passante e che questa sia pari alla banda del
segnale utile in ingresso). SNRi è, quindi, il rapporto segnale/rumore che si otterrebbe
ricorrendo ad un filtro “rettangolare” non rumoroso tale da far passare indistorto il segnale
utile tagliando il rumore fuori della banda di interesse. Invece, il rapporto segnale/rumore
in uscita ad un sistema reale è inferiore ad SNRi essendo 1/F < 1 (F > 1 per definizione).
In Tabella B.1 sono riportati dei valori, puramente indicativi, per la cifra e la temperatura
equivalente di rumore di alcuni amplificatori.
Inoltre, un doppio bipolo con perdite come, ad esempio, un cavo coassiale o una linea
bifilare, a temperatura T ha una cifra di rumore pari a
F = 1 + (L − 1)
T
.
T0
Per la dimostrazione si veda [3]. In particolare, se T = T0 , F = L ovvero l’attenuazione
introdotta dal mezzo coincide con la sua cifra di rumore.
Si considerino ora due sistemi con risposta in frequenza H1 (f ) e H2 (f ) connessi in
cascata, come illustrato in Figura B.4. Si indichino con F1 , Te1 , Bneq1 e G1 (F2 , Te2 ,
Bneq2 e G2 ) la cifra di rumore, la temperatura equivalente di rumore, la banda equivalente
di rumore ed il guadagno in potenza disponibile del Sistema 1 (Sistema 2). Si supponga,
infine, che la cascata sia alimentata da una sorgente di rumore bianco con PSD pari a
kT /2. Si supponga, inoltre, che la banda passante di H2 (f ) sia contenuta in quella di
108
Appendice B. Il Rumore Termico nei Sistemi di Comunicazione
Tipo dell’amplificatore
parametrico raffreddato con He liquido
parametrico raffreddato con N2 liquido
FET GaAs
FET GaAs
FET GaAs
FET Silicio
FET Silicio
circuito integrato
circuito integrato
Frequenza Te (F (dB))
4 GHz
9 (0.13)
6 GHz
50 (0.69)
9 GHz
330 (3.3)
6 GHz
170 (2.0)
1 GHz
110 (1.4)
400 MHz
420 (3.9)
100 MHz
226 (2.5)
10 MHz
1160 (7.0)
4.5 MHz
1860 (8.7)
G (dB)
10-20
10-20
6
10
12
13
26
50
75
Tabella B.1: Valori indicativi di Te , F , G e della frequenza operativa di alcuni amplificatori.
1
2
kT
-
-
H1 (f )
F1 , Te1 , Bneq1 , G1
H2 (f )
-
F2 , Te2 , Bneq2 , G2
Figura B.4: Sistemi LTI reali connessi in serie.
H1 (f ) e, più precisamente, che
∀f t.c. |H2 (f )| =
6 0 risulta |H1 (f )|2 ≈ G1 .
(B.3)
Tenuto conto delle precedenti ipotesi è immediato verificare che:
P1: la risposta in frequenza H(f ) del sistema serie è data da H(f ) = H2 (f )H1(f );
P2: il guadagno di potenza disponibile G del sistema serie è il prodotto dei guadagni di
potenza dei sistemi componenti, cioè
G , max |H(f )|2 = G1 G2 ;
f
P3: la banda equivalente di rumore Bneq del sistema serie coincide con quella del Sistema
2, cioè
Bneq = Bneq2 .
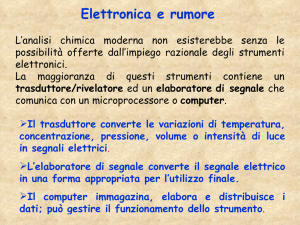
Applicando ai sistemi di figura la procedura precedentemente esposta (per il caso di
un solo sistema) si ottiene lo schema equivalente riportato in figura B.5. Per calcolare la
potenza di rumore in uscita al secondo sistema si può utilizzare il principio di sovrapposizione degli effetti considerando separatamente i due contributi al rumore in uscita ovvero
la sorgente di rumore con PSD di livello pari a 12 k(T + Te1 ) e quella di livello pari a 21 kTe2 ,
cioè
Pno = k(T + Te1 )GBneq + kTe2 G2 Bneq2 .
109
B.2. Temperatura e cifra di rumore di sistemi LTI
1
2
kT
- j 6
1
2
kTe1
- j -
H1 (f )
6
1
2
non rumoroso
kTe2
H2 (f )
-
non rumoroso
Figura B.5: Rappresentazione equivalente del sistema serie di Figura B.4.
In definitiva, la potenza di rumore in uscita alla cascata dei Sistemi 1 e 2 è data da
Te2
Pno = k T + Te1 +
GBneq
G1
dove si è fatto uso delle proprietà P2 e P3. In altri termini, la temperatura equivalente di
rumore Te del sistema serie è esprimibile come
Te = Te1 +
Te2
,
G1
e, quindi, la corrispondente cifra di rumore è
F =1+
Te1 Te2 1
+
.
T0
T0 G1
Inoltre, tenuto conto del fatto che valgono le seguenti uguaglianze
F1 = 1 +
Te1
,
T0
F2 = 1 +
Te2
,
T0
la cifra di rumore della cascata è data dalla seguente relazione
F = F1 +
F2 − 1
.
G1
(B.4)
La procedura esposta per la cascata di due sistemi LTI può essere estesa al caso più
generale di N sistemi LTI connessi in cascata a patto di generalizzare (in modo peraltro
ovvio) l’ipotesi (B.3). In tal caso, la temperatura equivalente di rumore e la cifra di rumore
del sistema serie sono date, rispettivamente, dalle formule
Te2
Te3
TeN
+
+ ...+
G1
G1 G2
G1 G2 · · · GN −1
(B.5)
F2 − 1 F3 − 1
FN − 1
+
+ ...+
G1
G1 G2
G1 G2 · · · GN −1
(B.6)
Te = Te1 +
e
F = F1 +
note come formule di Friis.
Si osservi che tali formule suggeriscono una regola per l’ordine di interconnessione tra
sistemi, al fine di ottenere (com’è senz’altro auspicabile) una cifra di rumore complessiva
più bassa possibile. Infatti,
110
Appendice B. Il Rumore Termico nei Sistemi di Comunicazione
• l’effetto del rumore introdotto dai sistemi successivi al primo è mitigato dagli eventuali fattori di amplificazione (Gi > 1) ai denominatori e, in particolare, tutti gli
addendi (tranne il primo) sono divisi per G1 . Ciò suggerisce di evitare come primo
elemento della serie un elemento con perdite (G1 < 1); se, in particolare, il primo sistema è un elemento con perdite (per esempio, un cavo coassiale o una guida
d’onda) l’attenuazione da esso introdotta ha un duplice effetto negativo: oltre ad
“amplificare” il rumore introdotto dagli stadi che seguono, come prima evidenziato,
introdurrà tanto più rumore quanto maggiore è L (si ricordi che F = L sotto opportune ipotesi). Quando, invece, G1 ≫ 1, il rumore complessivamente introdotto dalla
cascata è imputabile essenzialmente al solo primo stadio;
• il primo addendo F1 non è mitigato da alcun fattore, pertanto contribuirà completamente alla cifra di rumore complessiva. Ciò suggerisce di scegliere come primo stadio
della cascata un amplificatore a basso rumore (ed elevato guadagno).
Utilizzando la formula di Friis si può calcolare la temperatura equivalente dell’intero
ricevitore che, come si è già evidenziato, consente di riportare le sorgenti di rumore bianco
nella sezione di ingresso dello stesso. Se il segnale è captato da un’antenna è anche necessario considerare il contributo di rumore da essa raccolto e, a tale scopo, si definisce la cosiddetta Temperatura di antenna Ta . Più precisamente il rumore complessivo ha una PSD
di livello pari a kTS /2 (nella sezione d’ingresso dell’antenna) dove TS , Ta + Te è la temperatura di sistema e Te la temperatura equivalente di rumore degli stadi a radiofrequenza
del ricevitore.
B.3
Il ricevitore supereterodina: cenni
Per terminare questa appendice si ritiene opportuno introdurre il concetto di frequenza intermedia e quello ad esso collegato di ricevitore supereterodina. I sistemi di comunicazione
che operano in banda traslata per la trasmissione del segnale possono differire sotto molti
punti di vista, ad esempio, tipo di modulazione, frequenza portante, mezzi trasmissivi, etc.
Tuttavia essi hanno in comune la proprietà di adoperare un segnale portante che è spesso
un segnale sinusoidale, il quale trasporta attraverso il canale (in una qualche forma, che
è funzione del tipo di modulazione) il segnale di informazione. Pertanto alcuni elementi
quali oscillatori e filtri passa-banda sono di grande importanza per tutti i tipi di ricevitore.
Un tipico ricevitore deve essere in grado di realizzare alcune operazioni fondamentali
al di là del formato di modulazione:
• filtraggio, al fine di separare il segnale desiderato dagli altri segnali eventualmente
presenti;
• amplificazione, al fine di compensare le perdite derivanti dalla propagazione;
• eventuale sintonizzazione (tuning) sulla frequenza portante, al fine di selezionare il
segnale desiderato (si pensi alla classica radiolina utilizzata per demodulare i segnali
AM ed FM).
B.3. Il ricevitore supereterodina: cenni
111
In particolare, è sempre necessario amplificare e filtrare il segnale ricevuto prima della
demodulazione. In linea teorica tali operazioni potrebbero essere effettuate a radiofrequenza. Tuttavia, per una serie di motivi è opportuno eseguire il filtraggio e, in parte,
l’amplificazione ad una frequenza più bassa di quella della portante. In altri termini, può
essere conveniente realizzare ricevitori composti da due (o più) stadi di amplificazione e
filtraggio: il primo stadio opera a radiofrequenza ed è un amplificatore, eventualmente
sintonizzabile ovvero con frequenza di centro banda accordabile, con banda BRF relativamente larga, cioè BRF > W ; tale filtro non presenta spiccate caratteristiche di selettività e
pertanto lascia passare parzialmente anche segnali che non sono di stretto interesse. Prima
di passare al secondo stadio di amplificazione e filtraggio, il segnale è inviato al convertitore
di frequenza, che, tramite un oscillatore locale operante a frequenza fLO , trasla il segnale
modulato ad una frequenza intermedia fissa fIF (IF, dall’inglese Intermediate Frequency).
Qualora il ricevitore debba potersi sintonizzare sulla frequenza della portante, l’oscillatore
locale è accordato con il filtro a radiofrequenza, in modo da garantire che
fLO = fc + fIF .
Il secondo stadio di amplificazione e filtraggio può operare, quindi, ad una frequenza
intermedia fIF indipendente dalla frequenza portante fc . Il filtro IF sarà allora un filtro
passa-banda con frequenza di centro banda fIF e banda passante W ovvero pari a quella
del segnale modulato. Pertanto, l’operazione di filtraggio passa-banda introdotta come
passo preliminare alla demodulazione è, nella pratica, realizzata alla frequenza intermedia
fIF .
Si osservi ora che un eventuale segnale, posizionato attorno alla frequenza portante
′
fc = fLO + fIF , risulterebbe, a valle del convertitore di frequenza, centrato intorno alla
frequenza fc′ − fLO = (fLO + fIF ) − fLO = fIF e, pertanto, interferirebbe con il segnale di
interesse. È quindi necessario dimensionare la banda passante del filtro a radiofrequenza
in modo tale da tagliare il segnale presente nell’intorno delle frequenze ±(fLO + fIF ). La
frequenza fc′ è detta frequenza immagine e la condizione in grado di garantire la reiezione
del segnale centrato sulla frequenza immagine è, evidentemente, data da
W < BRF < 2fIF .
Un ricevitore con la struttura sopra descritta è comunemente denominato ricevitore
supereterodina; la sua struttura risulta vantaggiosa da più punti di vista. Infatti,
• non richiede amplificatori e filtri sintonizzabili selettivi in frequenza, ma solo tali da
eliminare le frequenze immagine;
• il filtro passa-banda che precede il demodulatore, molto selettivo in frequenza ed ad
elevato guadagno, può essere realizzato a frequenza più bassa di quella della portante
e comunque fissa: operare a frequenza intermedia fIF < fc rende più semplice l’eventuale realizzazione in numerico di alcune operazioni, in quanto è possibile operare
con frequenze di campionamento inferiori e, quindi, adoperare circuiti campionatori
di più facile realizzazione.
112
Appendice B. Il Rumore Termico nei Sistemi di Comunicazione