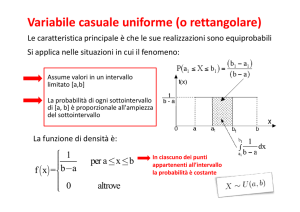
7. Sistemi di attesa
La funzione densità di probabilità f x per valori non negativi di x è: f x e x e cioè:
e x , x 0
f x;
x0
0,
La funzione distribuzione di probabilità F x si ottiene per valori x positivi:
F x
x
x
f x dx e
x
0
x
0
dx 0 dx e
x
x
x
dx e
x
0
e x
x x
0
x
x
dx
e 0 e e 1 e
0
Da cui:
1 e x , x 0
F x;
x0
0,
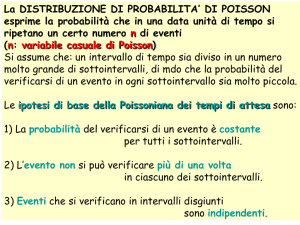
La variabile casuale esponenziale negativa è posta in relazione alla variabile casuale di poisson, in
quanto:
se il numero di eventi entro un determinato intervallo di tempo è distribuito secondo la distribuzione
di Poisson (con parametro ), allora il tempo intercorrente tra due successi è distribuito come una
Esponenziale negativa con parametro e viceversa.
La media si calcola nel seguente modo:
E t
1
La varianza:
Var t
1
2
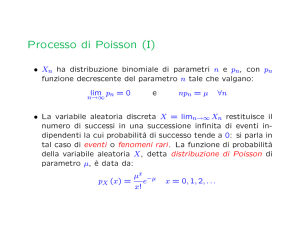
La distribuzione esponenziale negativa serve per modellizzare i processi di Poisson. La teoria sui
processi di poisson è applicabile in tutte quelle situazioni nelle quali un sistema inizialmente in uno
stato A può cambiare in uno stato B con una probabilità costante pari a .
L’istante di tempo in cui lo stato del sistema cambia è descritto da una variabile casuale
esponenziale negativa di parametro .
In pratica l’integrale da 0 a T di f(x) è la probabilità che il sistema passi allo stato B entro il tempo
T. La probabilità che il sistema rimanga allo stato A sarà 1 meno questo valore:
T
f x dx F T 1 e
T
0
T
1 f x dx 1 F T e T
0
In scenari reali, l’assunzione di un numero costante di eventi per unità di tempo è soddisfatta solo
per intervalli di tempo di durata limitata. Per esempio il numero di telefonate per ora ad un
centralino differisce in funzione dell’ora del giorno. Se ci si focalizza su intervalli di tempo per i
quali la frequenza di eventi è più o meno costante la distribuzione esponenziale negativa dà una
buona approssimazione.
Per esempio se nell’intervallo dalle 14:00 alle 16:00 di un giorno lavorativo la frequenza di
telefonate ad un centralino è costante allora la distribuzione esponenziale negativa può essere
utilizzata come un buon modello per la distribuzione del tempo che rimane prima della prossima
telefonata.
In questa esercitazione ci si è serviti dell’esponenziale negativa per riprodurre una serie di arrivi ad
un casello autostradale ad un canale. Con tasso degli arrivi 10 e 15 che rappresenta il
tempo di servizio.
Conoscendo F t e servendoci di numeri distribuiti casualmente siamo in grado di ricavare t.
F t 1 e t
x 1 e t
e t 1 x
t log 1 x
t
log 1 x
Si può ricavare x anche nel modo seguente:
1 F t e t
x 1 e t
log x t
t
log x
Si stabilisce che il primo arrivo avvenga a ta = 0, è possibile calcolare t:
t
log x
Con x valore casuale e 10
Quindi la colonna delle t cosi calcolate rappresenta il tempo fra due arrivi.
Si assume una 12 e si calcola il t di servizio nel modo seguente:
t
log x
Infine, è possibile calcolare il tempo di uscita delle auto dal sistema:
t u max t servizio t a ; t servizio t u della precedente
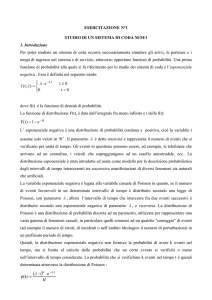
Riportando in un grafico i dati cosi ottenuti, cioè il n° degli utenti del sistema,nelle ascisse, che si è
portato a 300 per un evento di 30h per potere captare la stabilizzazione generale del sistema. E nelle
ordinate i ta e i tu degli stessi. Se tracciamo una verticale la distanza dei due punti di intersezione
delle due curve rappresenta il tempo speso dall’utente mentre con una sezione orizzontale la stessa
distanza rappresenta la lunghezza della coda in quell’istante di tempo ( = n° utente*lungh auto)
35
30
ta, tu
25
20
ingresso
15
uscita
10
5
0
0
100
200
n° utenti nel sistema
300
400