Università degli Studi di Roma Tor Vergata
Facoltà di Ingegneria
Corso di Laurea in Ingegneria dei Modelli e dei Sistemi
A.A. 2008-2009
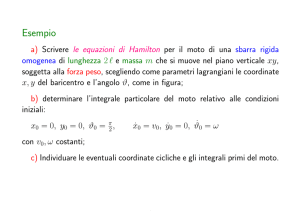
Attività Formativa
Variabili Azione-Angolo, Teoria
perturbativa ed il problema della
precessione di Mercurio
Studenti
Luca Dominedò
Marco Senatore
Docente Prof.
Vieri Mastropietro
Indice
1 Introduzione
1
1.1 Equazioni del moto di Hamilton . . . . . . . . . . . . . . . . . .
1.1.1
1
Trasformazioni di Legendre ed equazioni del moto di
Hamilton . . . . . . . . . . . . . . . . . . . . . . . . . .
1
1.1.2
Trasformazioni canoniche . . . . . . . . . . . . . . . . . .
4
1.1.3
Funzioni generatirci . . . . . . . . . . . . . . . . . . . . .
6
2 Sistemi Integrabili e Variabili azione-angolo
10
2.1 Sistemi Integrabili . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.2 Le Variabili azione-angolo . . . . . . . . . . . . . . . . . . . . . 13
2.2.1
Sistemi ad un grado di libertà . . . . . . . . . . . . . . . 13
2.2.2
Sistemi a più gradi di libertà . . . . . . . . . . . . . . . . 15
3 Il Problema di Keplero
17
3.1 Il problema dei due corpi . . . . . . . . . . . . . . . . . . . . . . 17
3.1.1
Anomalia vera ed anomalia eccentrica . . . . . . . . . . . 22
3.1.2
La anomalia media e l’equazione di Keplero . . . . . . . 25
3.2 Le variabili azione-angolo per il problema di Keplero . . . . . . 26
4 Teoria perturbativa
32
5 La Precessione di Mercurio
40
i
INDICE
Bibliografia
ii
48
Capitolo 1
Introduzione
1.1
Equazioni del moto di Hamilton
In questo capitolo daremo un breve cenno del formalismo Hamiltoniano, concentrandoci in particolar modo sul concetto di trasformazioni canoniche.
1.1.1
Trasformazioni di Legendre ed equazioni del moto
di Hamilton
Ricordiamo che ad un sistema con n gradi di libertà corrispondono n equazioni
di Lagrange
d
dt
∂L
∂ q˙i
−
∂L
=0
∂qi
Si tratta di n equazioni del secondo ordine; il sistema è completamente determinato solo se ad ogni istante sono assegnati gli n valori iniziali delle qi e gli
n valori iniziali delle q˙i .
In questo senso le qi e le q˙i formano un sistema completo di 2n variabili indipendenti necessario per descrivere il moto.
Si può considerare la formulazione Lagrangiana come la descrizione della mec-
1
2
CAPITOLO 1. INTRODUZIONE
canica in termini di coordinate e velocità generalizzate con il tempo come
parametro.
Ora si vuole stabilire una formulazione in cui le variabili indipendenti sono le
coordinate generalizzate ed i momenti generalizzati pi =
∂L(q,q̇,t)
.
∂ q˙i
Per passare da (q, q̇, t) a (q, p, t) si utilizzano le trasformazioni di Legendre.
Le trasformazioni di Legendre
Segue ora una breve trattazione su tali trasformazioni.
Si consideri una funzione f (x, y).
Il differenziale è df = udx + vdy con u =
∂f
,
∂x
v=
∂f
∂y
Si vuole passare dalle variabili (x, y) a (u, y) in modo da esprimere le quantità
differenziali in funzione di du e dy.
Sia g(u, y) = f − ux.
Il differenziale di g è: dg = df − udx − xdu = vdy − xdu.
Le quantità x e v sono esprimibili in funzione di u e y nel modo seguente:
∂g
ev=
x = − ∂u
∂g
.
∂y
Torniamo al passaggio da (q, q̇, t) a (q, p, t).
Al posto della Lagrangiana si ha a che fare con:
H(p, q, t) =
X
i
q˙i pi − L(q, q̇, t);
la funzione H(p, q, t) è detta Hamiltoniana.
(1.1)
3
CAPITOLO 1. INTRODUZIONE
Scrivo il differenziale di H:
X ∂H
dH =
i
∂qi
dqi +
X ∂H
i
∂pi
dpi +
∂H
dt
∂t
(1.2)
Dalla differenziazione della (1.1) si ha anche:
dH =
X
q˙i dpi +
i
X
i
pi dq˙i −
X ∂L
i
∂ q˙i
dq˙i −
X ∂L
i
∂qi
nella quale si elidono i termini in dq̇i , poiché ṗ =
eguagliando la (1.2) con la la (1.3) si ha:
dH =
X
i
q˙i dp −
X
i
ṗi dqi −
dqi −
d
dt
∂L
∂ q̇
∂L
dt,
∂t
=
(1.3)
∂L
;
∂q
quindi
X ∂H
X ∂H
∂L
∂H
dt =
dq +
dp +
dt
∂t
∂q
∂p
∂t
i
i
i
i
Affinchè questa uguaglianza sia soddisfatta, devono valere le seguenti relazioni:
q˙ = ∂H
i ∂pi
(1.4)
ṗi = − ∂H
∂qi
∂L = − ∂H
∂t
∂t
Le prime due relazioni prendono il nome di equazioni canoniche di Hamil-
ton. Si tratta di un sistema di 2n equazioni che sostituiscono quelle di Lagrange.
In linea di principio per risovere un problema meccanico con la formulazione
hamiltoniana si scrive la lagrangiana come L(q, q̇, t); si scrivono i momenti p
ed infine si costruisce l’hamiltoniana e si risolvono le equazioni canoniche.
4
CAPITOLO 1. INTRODUZIONE
1.1.2
Trasformazioni canoniche
Siano Γp,q lo spazio delle fasi di (p, q) e ΓP,Q lo spazio delle fasi di (P, Q).
Definizione 1.1.1 (Trasformazione canonica) Sia Ψ una trasformazione
Ψ : (p, q, t) ∈ Γp,q × R → (P, Q, t) ∈ ΓP,Q × R
data da
Q = Q(p, q, t)
P = P (p, q, t)
(1.5)
differenziabile e localmente invertibile.
Queste due condizioni sono garantite assumendo che la matrice Jacobiana
J[(P, Q)/(p, q)] =
∂P1
∂p1
...
..
.
∂P1
∂pn
∂P1
∂q1
..
.
...
..
.
∂P1
∂qn
..
.
∂Pn
∂p1
...
∂Pn
∂pn
∂Pn
∂q1
...
∂Pn
∂qn
∂Q1
∂p1
...
∂Q1
∂pn
∂Q1
∂q1
...
∂Q1
∂qn
∂Qn
∂p1
...
∂Qn
∂pn
∂Qn
∂q1
...
..
.
..
.
..
.
..
.
∂Qn
∂qn
.
abbia detrminante non nullo ∀(p, q, t) ∈ Γp,q × R.
Una tale trasformazione è detta canonica se qualunque sia l’Hamiltoniana regolare H(p, q, t)esiste una Hamiltoniana regolare H ′ (P, Q, t) tale che tutte le
traiettorie t → (p(t), q(t))in Γp,q soluzioni del sistema Hamiltoniano (1.4) sono
trasformate dalla Ψ nelle traiettorie t → (P (t), Q(t)) in ΓP,Q soluzioni del
sistema Hamiltoniano corrispondente all’ Hamiltoniana H ′ :
Q̇ = ∂H ′
h
∂Ph
P˙ = − ∂H ′
h
∂Qh
(1.6)
5
CAPITOLO 1. INTRODUZIONE
Tra le trasformazioni canoniche ve ne sono alcune particolarmente importanti caratterizzate dalla seguente
Definizione 1.1.2 (Trasformazione completamente canonica) Sia
Φ : (p, q) ∈ Γp,q → (P (p, q), Q(p, q)) ∈ ΓP,Q
una trasformazione localmente invertibile sullo spazio delle fasi e indipendente dal tempo. Una tale trasformazione è detta completamete canonica se è
canonica ed inoltre
H ′(P, Q, t) = H(Φ−1 (P, Q), t)
Definizione 1.1.3 (Parentesi di Poisson) Siano F e G due funzioni differenziabili su Γp,q , a valori reali.
Si definisce parentesi di Poisson tra F e G, e si indica con [F, G], la quantità
[F, G]p,q
n
X
∂F ∂G
∂F ∂G
−
]
=
[
∂qh ∂ph ∂ph ∂qh
h=1
(1.7)
Teorema 1.1.4 Condizione necessaria e sufficiente affinchè Φ sia completamente canonica è che ∀(i, k) = 1, . . . , n
[Qi , Qk ]p,q = 0,
[Pi , Pk ]p,q = 0,
[Qi , Pk ]p,q = δi,k
(1.8)
Osservazione 1.1.5 Si possono riscrivere le equazioni del moto del sistema
Hamiltoniano con la notazione di Poisson:
[qi , H] = q˙i =
∂H
∂pi
[pi , H] = p˙h = −
∂H
∂qh
(1.9)
(1.10)
6
CAPITOLO 1. INTRODUZIONE
1.1.3
Funzioni generatirci
Se le Qh e le Ph che definiscono una trasformazione canonica devono essere
coordinate canoniche, allora esse devono soddisfare un principio modificato di
Hamilton del tipo
δ
Z
t2
(
t1
X
h
Ph Q̇h − H ′ (Q, P, t))dt = 0
(1.11)
Allo stesso tempo, le vecchie coordinate soddisfano un principio analogo
Z t2 X
δ
(
ph q˙h − H(q, p, t))dt = 0
(1.12)
t1
h
Il verificarsi simultaneo della (1.11) e della (1.12) non significa che gli integrandi
debbano essere uguali, bensı̀ essi possono differire al più di una derivata totale,
rispetto al tempo, di una funzione arbitraria F .
L’intergrale tra i due punti estremi di questa differenza è allora
Z t2
dF
dt = F (2) − F (1)
t1 dt
e la variazione di tale integrale è automaticamente nulla qualunque sia la funzione F , poichè la variazione si annulla nei punti estremi. La funzione arbitraria F è chiamata funzione generatrice della trasformazione poichè, nota F ,
le equazioni di trasformazione (1.5) risultano completamente determinate.
Per ragioni ovvie, si può scrivere la funzione generatrice come funzione delle
sole variabili indipendenti in una delle seguenti forme
F1 (q, Q, t)
F2 (q, P, t)
F3 (p, Q, t)
F4 (p, P, t)
(1.13)
Nel caso in cui la prima forma F1 sia possibile, allora gli integrali della
(1.11) e della (1.12) sono legati dalla seguente relazione
X
h
ph q˙h − H =
X
h
Ph Q̇h − H ′ −
dF1 (q, Q, t)
dt
(1.14)
7
CAPITOLO 1. INTRODUZIONE
Sviluppando la derivata totale di F rispetto al tempo, si ha
X ∂F1
∂F1
dF1 (q, Q, t) X ∂F1
Q̇h +
=
q˙h +
dt
∂qh
∂Qh
∂t
h
h
Da cui segue che
X
h
(ph −
X
∂F1
∂F1
∂F1
)q˙h − H =
(ph +
)Q̇h − H ′ +
∂qh
∂Qh
∂t
h
Poichè le vecchie e le nuove coordinate, qh e Qh , sono considerate qui come
variabili indipendenti, la relazione (1.14) sussiste solo se i coefficienti delle q̇h
e
dotQh sono separatamente uguali a zero
ph =
∂F1
∂qh
∂F1
Ph = − ∂Q
h
H′ = H +
(1.15)
∂F1
∂t
Le n equazioni della prima espressione della (1.15) costituiscono n relazioni
tra le ph , qh , Qh e t. Risolvendo queste equazioni rispetto alle n variabili
Qh in funzione delle ph , qh e t, si ottiene la prima metà delle equazione di
trasformazione (1.5).
Una volta stabilite le relazioni tra ogni Qh e le (ph , qh ), la seconda espressione
della (1.15) che esprimono le Ph in funzione di (ph , qh ) permettono di ricavare
l’ altra metà dalle (1.5).
Per effettuare tutte queste operazioni è necessario che:
2
∂ F1 (q, Q, t)
det
6= 0
h, k = 1, . . . , n
∂qk ∂Qh
(1.16)
Infine con l’ultima della (1.15), si trova la nuova Hamiltoniana H ′.
Passiamo ad una funzione generatrice del tipo F2 (q, P, t): il passaggio dalle
variabili indipendenti q e Q alle variabili q e P può essere effettuato tramite
8
CAPITOLO 1. INTRODUZIONE
una trasformazione di Legendre, poichè per la seconda equazione della (1.15)
∂F1
.
si ha Ph = − ∂Q
h
Da qui si osserva che
F2 (q, P, t) = F1 (q, Q, t) +
X
Ph Qh
(1.17)
h
L’equazione (1.14) diventa
P
ph q˙h − H = h Q̇h Ph − H ′ +
P
= − h Qh P˙h − H ′ + dF2 (q,P,t)
dt
P
h
d
(F2 (q, P, t)
dt
−
P
h
Qh Ph )
Ripetendo il procedimento fatto per F1 , ossia derivando F2 e raccogliendo i
coefficienti di q˙h e di P˙h , si ottengono le equazioni di trasformazione
ph =
Qh =
∂F2
∂qh
∂F2
∂Ph
H′ = H +
(1.18)
∂F2
∂t
Per trovare le equazioni della trasformazione canonica è necessario che F2
soddisfi la condizione:
2
∂ F2 (q, P, t)
det
6= 0
∂qk ∂Ph
h, k = 1, . . . , n
(1.19)
Anche il terzo tipo di funzione generatrice F3 (p, Q, t) può essere collegato
con F1 mediante una trasformazione di Legendre, visto che
F3 (Q, p, t) = F1 (q, Q, t) −
X
∂F1
∂qh
qh ph
= ph ;
(1.20)
h
L’equazione (1.14) assume ora la forma:
−
X
h
p˙h qh − H =
X
h
Ph Q̇h − H ′ +
d
(F3 (p, Q, t)
dt
(1.21)
9
CAPITOLO 1. INTRODUZIONE
Con il solito procedimento si ottiene
3
qh = − ∂F
∂ph
∂F3
Ph = − ∂Q
h
H′ = H +
(1.22)
∂F3
∂t
Per trovare le equazioni della trasformazione canonica è necessario che F3
soddisfi la condizione:
2
∂ F3 (p, Q, t)
6= 0
det
∂pk ∂Qh
h, k = 1, . . . , n
(1.23)
Infine se si prendono le p e le P come variabili indipendenti, la corrispondente funzione generatrice F4 può essere collegata ad F1 mediante una doppia
trasformazione di Legendre.
F4 (p, P, t) = F1 (q, Q, t) +
X
h
Ph Qh −
X
qh ph
(1.24)
h
e l’equazione (1.14) si riduce a
−
X
h
p˙h qh − H = −
X
h
d
Qh P˙h − H ′ + (F4 (p, P, t)
dt
(1.25)
L’ultimo gruppo di equazioni di trasformazione è quindi
4
qh = − ∂F
∂ph
∂F4
Qh = − ∂P
h
H′ = H +
(1.26)
∂F4
∂t
Per trovare le equazioni della trasformazione canonica è necessario che F4
soddisfi la condizione:
2
∂ F4 (p, P, t)
6= 0
det
∂pk ∂Ph
h, k = 1, . . . , n
(1.27)
Capitolo 2
Sistemi Integrabili e Variabili
azione-angolo
2.1
Sistemi Integrabili
Un problema classico della teoria dei sistemi di equazioni differenziali è la riducubilità della sua risoluzione a quadrature: si chiede di scrivere la soluzione
delle equazioni in una forma che richieda un numero finito di operazioni algebriche, inclusa l’ inversione di funzioni, ed il calcolo di integrali di funzioni
note, quadrature secondo un linguaggio un po’ arcaico.
E’ noto che per un sistema di equazioni differenziali del primo ordine che vive
in Rd , se si conoscono d − 1 integrali primi indipendenti, è possibile in linea di
principio ridurre la soluzione del sistema a quadrature.
Quindi la riduzione a quadrature del sistema Hamiltoniano, che è definito in
R2n , richiederebbe a priori 2n − 1 integrali primi indipendenti. Una delle principali peculiarità dei sistemi Hamiltoniani è che la conoscenza di soli n integrali
primi è sufficiente per la sua riduzione a quadrature, risultato fornito dal teorema di Liouville.
10
CAPITOLO 2. SISTEMI INTEGRABILI E VARIABILI AZIONE-ANGOLO11
Quindi se supponiamo di avere una Hamiltoniana in cui tutte le coordinate
generalizzate sono cicliche, dalle equazioni (1.4) risulta che gli n impulsi generalizzati sono costanti e quindi identificabili con gli n integrali primi indipendenti grazie ai quali possiamo ridurre la soluzione del sistema alle quadrature.
Questo vuol dire che dato un sistema Hamiltoniano ci chiediamo come trovare
una trasformazione canonica tramite la quale la nuova Hamiltoniana sia funzione solo dei nuovi momenti mentre le nuove coordinate sono tutte cicliche.
Comunque gli n integrali primi non devono essere necessariamente i momenti;
tuttavia essi non possono essere scelti completamente ad arbitrio: gli impulsi
generalizzati soddisfano la condizione di involuttività:
[pi , pk ] = 0,
∀(i, k) = 1, . . . , n.
Tale condizione è invariante per trasformazioni canoniche e quindi è una condizione necessaria sulla scelta degli n integrali primi.
Diamo la seguente:
Definizione 2.1.1 Diremo che le n funzioni f1 , . . . , fn formano un sistema
in involuzione se esse sono indipendenti, ossia
∂(f1 , . . . , fn )
=n
rank
∂(q1 , . . . , qn , p1 , . . . , pn )
e la parentesi di Poisson tra due qualunque di esse si annulla, ossia
[fi , fk ] = 0,
∀(i, k) = 1, . . . , n.
Supponiamo di conoscere n funzioni f1 (q, p), . . . , fn (q, p) che formino un
sistema in involuzione; possiamo costruire una trasformazione canonica per
cui queste funzioni siano i nuovi momenti? Ovvero: possiamo trovare altre n
funzioni α1 (q, p), . . . , αn (q, p) che unite alle f definiscano una trasformazione
canonica? La risposta è nella:
CAPITOLO 2. SISTEMI INTEGRABILI E VARIABILI AZIONE-ANGOLO12
Proposizione 2.1.2 Sia f1 (q, p), . . . , fn (q, p) un sistema in involuzione. Allora esiste una trasformazione canonica a nuove variabili α, f
α = α(q, p) f = f (q, p).
Sotto l’ipotesi:
∂(f1 , . . . , fn )
6= 0
(2.1)
det
∂(p1 , . . . , pn )
la trasformazione canonica si costruisce tramite la funzione generatrice
Z X
S(f, q) =
pj (f, q)dqj
(2.2)
j
dove le p1 (f, q), . . . , pn (f, q) sono ottenute per inversione delle f1 (q, p), . . . , fn (q, p)
rispetto alle p.
Veniamo ora al teorema di Liouville sui sistemi integrabili; prima però diamo
la seguente definizione:
Definizione 2.1.3 Una funzione f (q, p, t) è un integrale primo se verifica
df
∂f
= [f, H] +
= 0,
dt
∂t
(2.3)
o, limitando l’attenzione a funzioni che non dipendono esplicitamente dal tempo,
[f, H] = 0.
(2.4)
Teorema 2.1.4 Supponiamo che un sistema canonico ad n gradi di libertà
con Hamiltoniana H(q, p) ammetta n integrali primi f1 (q, p), . . . , fn (q, p) che
formino un sistema in involuzione. Allora si può costruire per quadrature la
funzione generatrice S(f, q) di una trasformazione canonica (f, α) = C (q, p)
tale che l’Hamiltoniana trasformata dipenda solo dai nuovi momenti f1 , . . . , fn
e le soluzioni delle equazioni di Hamilton si scrivono:
f (t) = f 0
j
j
α (t) = α0 + t ∂H | 0 0 , j = 1, . . . , n,
j
j
∂fj f1 ,...,fn
con αj0 , fj0 determinati dai dati iniziali.
(2.5)
CAPITOLO 2. SISTEMI INTEGRABILI E VARIABILI AZIONE-ANGOLO13
2.2
Le Variabili azione-angolo
Il teorema di Liouville ci mette a disposizione un metodo efficace di integrazione, ma la forma della soluzione che se ne ricava non dà molte informazioni
sugli aspetti qualitativi della dinamica. In particolare, non è immediatamente
evidente l’esistenza di comportamenti periodici, che si rivelano solo quando si
scrivono in modo esplicito le soluzioni.
2.2.1
Sistemi ad un grado di libertà
Nel caso di un sistema conservativo ad un grado di libertà con Hamiltoniana
H(q, p) le orbite sul piano di fase (q, p) sono le curve definite implicitamente
dallequazione H(q, p) = E. Sia ora (q̄, p̄) un punto di minimo per H. Allora
esiste un intervallo aperto E tale che per E ∈ E l’equazione H(q, p) = E determina una curva chiusa γE intorno al punto (q̄, p̄); al variare di E si ha una
famiglia continua di curve chiuse.
Si consideri ora un valore fissato di E; la curva γE corrispondente è topologicamente simile ad una circonferenza, e può dunque descriversi con una coordinata
ϕ ∈ T; con questa coordinata diventa agevole tener conto della periodicità della soluzione che descrive la curva γE . E’ naturale chiedersi anche se esista una
coordinata canonica A coniugata a ϕ che parametrizza le curve γE .
Una coordinata A siffatta deve essere costante su ciascuna delle curve γE , e
quindi deve essere una costante del moto per H. Non si perde di generalità se
si suppone che sia
dA
dp
6= 0, sicchè esiste anche la funzione generatrice S(A, q)
di una trasformazione canonica che introduce A come coordinata, ed è
Z
S(A, q) = p(A, q)dq.
(2.6)
CAPITOLO 2. SISTEMI INTEGRABILI E VARIABILI AZIONE-ANGOLO14
Se la ϕ è la coordinata coniugata a A, deve valere l’uguaglianza
I
I
pdq =
Adϕ;
γE
γE
in virtù della proprietà delle trasformazioni canoniche di conservare l’integrale
della forma differenziale pdq su una curva chiusa. Poichè però A è costante
su γE , e tenuto conto della periodicità di ϕ, l’ integrale a destra vale 2πA, e
dunque deve essere
1
A=
2π
I
pdq.
(2.7)
γE
La quantità A cosı̀ introdotta è detta azione; è immediato osservare che essa
rappresenta l’area racchiusa dalla curva γE , divisa per 2π.
Al variare di E, la (2.7) definisce A come funzione di E; poiché sia E che
A parametrizzano la stessa famiglia di curve, questa funzione deve essere invertibile, almeno localmente, sicché possiamo scrivere l’Hamiltoniana H come
funzione di A.
Inoltre A è una costante del moto per E, come abbiamo già osservato. Possiamo dunque applicare il teorema di Liouville, e la funzione generatrice (2.6) ci
consnte di calcolare langolo ϕ coniugato ad A.
Per l’Hamiltoniana trasformata H(A) le equazioni del moto sono
Ȧ = 0,
ϕ̇ = ω(A),
dove ω(A) =
è
dH
.
dA
(2.8)
La soluzione corrispondente alle condizioni iniziali A(0), ϕ(0),
A(t) = A(0),
ϕ(t) = ω(A(0))t + ϕ(0)
Dal momento che ϕ è un angolo, l’orbita è periodica di periodo T =
(2.9)
2π
.
ω(A(0))
E’ utile anche osservare che se la funzione A(E) è nota, il periodo è
T = 2π
dA
.
dE
(2.10)
CAPITOLO 2. SISTEMI INTEGRABILI E VARIABILI AZIONE-ANGOLO15
2.2.2
Sistemi a più gradi di libertà
L’introduzione di variabili azione-angolo per sistemi a più gradi di libertà è
tecnicamente più complessa. Nel caso di un grado di libertà è relativamente
semplice individuare delle curve chiuse, o cicli, che rappresentano un moto
strettamente periodico, e quindi calcolare l’azione come un integrale sul ciclo.
Nel caso di più gradi di libertà non è evidente a priori che debbano esistere dei
cicli sui quali calcolare le azioni. In certi casi, e tra questi quello classico del
moto centrale, la costruzione dei cicli non è difficile.
Procediamo, come nel paragrafo 2.1, supponendo di aver costruito un sistema
completo di funzioni in involuzione, che denoteremo ancora con f1 (q, p), . . . ,
fn (q, p). La domanda che ci poniamo è se si possa costruire un secondo sistema completo di funzioni in involuzione A1 (q, p), . . . , An (q, p) che abbiano la
proprietà di essere in involuzione anche con le f , senza esserne indipendenti, e
che le variabili ϕ1 , . . . , ϕn ad esse coniugate costruite col metodo di Liouville
(proposizione 2.1.2), siano angoli, ossia ϕ ∈ Tn .
La proposizione che segue afferma che la risposta è positiva.
Proposizione 2.2.1 Sia f1 (q, p), . . . , fn (q, p) un sistema completo di funzioni
in involuzione in un dominio aperto D dello spazio delle fasi, e supponiamo che
la superficie di livello definita implictamente da f1 (q, p) = . . . = fn (q, p) = 0
contenga una componente connessa e compatta M0 . Allora:
(i)M0 è una varietà differenziabile diffeomorfa ad un toro di dimensione n;
(ii) in un intorno aperto U(M0 ) ⊂ D si possono introdurre variabili azioneangolo A ∈ G ⊂ Rn e ϕ ∈ Tn , dove G è un aperto, mediante una trasformazione canonica
C : Tn × G −→ U(M0 )
(q, p) 7−→ (ϕ, A) = C (q, p)
tale che A1 , . . . , An dipendono solo da f1 , . . . , fn .
CAPITOLO 2. SISTEMI INTEGRABILI E VARIABILI AZIONE-ANGOLO16
Definizione 2.2.2 Le n variabili
I X
n
1
Aj =
pk (q, f )dqj
2π γj
j = 1, . . . , n
(2.11)
k=1
,dove la curva chiusa γj è la proiezione della traiettoria sul piano (pj , qj ), sono
dette variabili d’azione.
A questo punto, stabilita l’esistenza delle variabili azione-angolo, possiamo
procedere all’enunciato del teorema sui sistemi integrabili
Teorema 2.2.3 Supponiamo che l’Hamiltoniana H(q, p) sullo spazio delle fasi
ammetta un sistema di integrali in involuzione f1 , . . . , fn . Assegnato c =
(c1 , . . . , cn ) ∈ Rn in modo che la varietà determinata dalle equazioni f1 (q, p) =
c1 , . . . , fn (q, p) = cn contenga una componente connessa e compatta Mc . Allora
in un intorno di Mc si possono introdurre delle variabili canoniche d’azioneangolo (ϕ, A) tali che L’Hamiltoniana trasformata dipende solo da A1 , . . . , An
e le equazioni del moto sono date da:
A (t) = A0
j
j
ϕ (t) = ϕ0 + ω (A0 , . . . , A0 )t,
j
j
j
1
n
dove ϕ0j e A0j sono i dati iniziali, e ωj =
moto.
∂H
∂AJ
j = 1, . . . , n,
sono le frequenze proprie del
Capitolo 3
Il Problema di Keplero
Il sistema meccanico integrabile più noto è costituito da due masse puntiformi
m1 , m2 interagenti tramite una forza conservativa con potenziale V dipendente
solamente dalla distanza tra i due punti:
V (~r1 , ~r2 ) = V (|~r1 − ~r2 |).
Risolveremo questo sistema nel caso del potenziale Kepleriano:
V (|~r1 − ~r2 |) = −
k
|~r1 − ~r2 |
dove k è una costante.
3.1
Il problema dei due corpi
E’ noto che il moto di due masse puntiformi m1 , m2 sottoposte all’azione di una
k
forza conservativa centrale con potenziale V (|~r1 − ~r2 |) = − |~r1 −~
è equivalente
r2 |
al moto di una singola particella di massa m:
m=
m1 m2
,
m1 + m2
17
(3.1)
18
CAPITOLO 3. IL PROBLEMA DI KEPLERO
che si muove su un piano sotto l’azione di una forza conservativa centrale
agente su m, da un punto 0 nel piano, con la stessa energia potenziale V .
Tale moto è descritto dalla Lagrangiana:
L (r, ϑ, ṙ, ϑ̇) =
m 2
(ṙ + r 2 ϑ̇2 ) − V (r),
2
(3.2)
dove ~r = ~r1 − ~r2 e ϑ sono le coordinate polari rispetto al punto 0.
Il moto del sistema meccanico descritto dalla (3.2) ammette due integrali primi:
M = mr 2 ϑ̇
(3.3)
E = m2 (ṙ 2 + r 2 ϑ̇2 ) + V (r)
= mṙ2 + M 2 − k
2
2mr 2
r
dove M è il momento angolare del corpo con massa m, mentre E è la sua
energia.
La prima equazione delle (3.3) è la legge di conservazione del momento angolare, che per il moto piano di una particella in un campo centrale, ammette
un’interpretazione geometrica semplice. L’espressione 21 r 2 dϑ rappresenta l’area
del settore formato da due raggi vettori infinitamente vicini e da un elemento d’arco della traiettoria. Indicando questa superficie con df , il momento
angolare della particella assume la forma
M = 2mf˙,
dove la derivata f˙ è detta velocità areolare. La conservazione del momento
angolare implica dunque la costanza della velocità areolare: in uguali intervalli
di tempo il raggio vettore della particella in moto descrive aree uguali; questa
è la seconda legge di Keplero.
Dalla seconda equazione delle (3.3) si ottiene:
r
dr
2
k
M2
ṙ =
=
[E + ] − 2 2 ,
dt
m
r
mr
(3.4)
19
CAPITOLO 3. IL PROBLEMA DI KEPLERO
quindi, separando le variabili ed integrando:
Z
dr
q
t=
+ costante.
2
k
M2
[E
+
]
−
m
r
m2 r 2
(3.5)
Questa equazione determina in modo implicito la distanza r come funzione del
tempo.
Guardando la seconda equazione delle (3.3) vediamo che la parte radiale del
moto si può considerare come il moto di una particella con energia E in un
campo con energia potenziale efficace
Vef f =
k
M2
− .
2
2mr
r
(3.6)
E’ immediato verificare che in corripondenza di r =
M2
,
mk
Vef f ha un minimo,
mk 2
che indicheremo con Emin , di valore Emin = − 2M 2 ; quindi se consideriamo
valori di E nell’ intervallo Emin ≤ E < 0, per il teorema dei moti periodici
avremo moti finiti e periodici, con periodo:
Z r+ (M,E)
dr
q
T =2
2
r− (M,E)
[E + kr ] −
m
M2
m2 r 2
,
dove r+ (M, E), r− (M, E) sono le soluzioni dell’equazione E =
E’ facile verificare che r− e r+ soddisfano le seguenti relazioni:
r +r = −k
−
+
E
r r = − M2
− +
(3.7)
M2
2mr 2
− kr .
(3.8)
2Em
Per completare la soluzione del problema dobbiamo determinare la relazione
tra r e ϑ; scrivendo la prima delle (3.3) nella forma:
dϑ =
M
dt,
mr 2
ponendovi dt dalla (3.4) e integrando, otteniamo:
Z
Mdr
q
ϑ=
+ ϑ0 ,
2
k
M2
2
mr
[E + r ] − m2 r2
m
(3.9)
CAPITOLO 3. IL PROBLEMA DI KEPLERO
20
che è la relazione cercata.
Abbiamo visto che la parte radiale del moto è periodica e limitata in una
regione compresa tra r− ed r+ ; non è detto però che anche il moto complessivo
sia periodico e compia un’orbita chiusa.
Nell’intervallo di tempo in cui r varia da r+ a r− e di nuovo a r+ , il raggio
vettore ruota di un angolo ∆ϑ che, conformemente alla (3.9), è
Z r+ (M,E)
Mdr
q
∆ϑ =
.
2
k
M2
r− (M,E) mr 2
[E
+
]
−
m
r
m2 r 2
(3.10)
Perché la traiettoria sia chiusa è necessario che questo angolo sia una frazione
, dove m ed n sono numeri interi.
razionale di 2π, sia cioè uguale a ∆ϑ = 2π m
n
Nel problema di Keplero sia m che n sono pari ad 1 quindi il moto è periodico
e compie un’orbita chiusa, in particolare un’ellisse.
Infatti, definendo:
q
e= 1+
p = M2
2EM 2
mk 2
(3.11)
km
e risolvendo l’integrale (3.9) si trova:
1 p
cos(ϑ − ϑ0 ) = ( − 1)
e r
=⇒
r=
p
.
1 + e cos(ϑ − ϑ0 )
(3.12)
Questa è proprio l’equazione di un’ellisse descritta in coordinate polari r e ϑ
con l’origine presa in un fuoco, che ha semiasse maggiore a dato dall’ espres√
+
e semiasse minore b dato dall’espressione b = r− r+ ; p è il
sione a = r− +r
2
parametro dell’ellisse, e è l’eccentricità e ϑ0 è l’argomento del pericentro; dalla
prima equazione delle (3.11) si verifica facilmente che 0 ≤ e < 1, visto che
stiamo considerando valori di E nell’ intervallo Emin ≤ E < 0.
Dall’ espressione di a e la prima equazione delle (3.8), si trova la relazione tra
il semiasse maggiore e l’energia E che ci tornerà utile in seguito:
a=−
k
.
2E
(3.13)
CAPITOLO 3. IL PROBLEMA DI KEPLERO
21
Quando i due corpi in questione sono il Sole e un pianeta del sistema solare
è lecito assumere la massa del Sole infinita; ciò comporta che la massa ridotta
m coincide con quella del pianeta.
Si può quindi affermare che il pianeta descrive un’orbita ellittica, data dall’equazione (3.12), che ha il Sole come fuoco delle coordinate polari r e ϑ (prima
legge di Keplero); in questo caso ϑ0 è l’argomento del perielio (si veda la figura
3.1, ricordando di porre l’origine delle coordinate in S).
Figura 3.1:
CAPITOLO 3. IL PROBLEMA DI KEPLERO
3.1.1
22
Anomalia vera ed anomalia eccentrica
Introduciamo ora un angolo molto usato in meccanica celeste: l’anomalia vera
ψ(t) definita come segue:
ψ(t) = ϑ(t) − ϑ0 ;
(3.14)
quindi l’anomalia vera ψ è l’angolo misurato rispetto al perielio, come mostrato
nella figura 3.2.
L’equazione dell’ellisse nelle coordinate r e ψ è ovviamente:
Figura 3.2:
r=
p
.
1 + e cos ψ
(3.15)
CAPITOLO 3. IL PROBLEMA DI KEPLERO
23
Detto a il semiasse maggiore dell’ellisse, si può facilmente trovare la sua relazione con p osservando dalla figura 3.2 che preso ψ = 0 vale:
a − ae =
p
1+e
=⇒
p = a(1 − e2 )
(3.16)
Utilizzando la (3.16) possiamo riscrivere la (3.15) come segue:
r=
a(1 − e2 )
1 + e cos ψ
(3.17)
A volte è comodo introdurre un altro angolo ξ, detto anomalia eccentrica,
nel modo illustrato in figura 3.3. Si consideri la circonferenza di raggio a il
cui centro coincide col centro dell’ellisse; detta P la posizione del pianeta, si
conduca la perpendicolare da P all’asse maggiore dell’ellisse, e siano Q il piede
della perpendicolare e P ′ il punto di intersezione della perpendicolare con la
circonferenza tale che P è interno al segmento QP ′ . L’anomalia eccentrica ξ è
\′.
definita come langolo ξ = QOP
Ricaviamo la relazione che fornisce la parametrizzazione dell’ellisse tramite
ξ; dalla figura 3.3 si osserva che valgono:
|OS| + |SQ| = |OQ|
|OS| = ae
|OQ| = a cos ξ
|SQ| = r cos ψ
dalle quali si ottiene:
|SQ| = a cos ξ − ae = r cos ψ.
(3.18)
A questo punto, sostituendo il valore di r dato dalla (3.17) nella (3.18) e con
un rapido calcolo, risulta:
cos ψ =
cos ξ − e
1 − e cos ξ
(3.19)
CAPITOLO 3. IL PROBLEMA DI KEPLERO
24
Figura 3.3:
Quindi inserendo (3.19) in (3.18) si trova la relazione tra r e ξ:
r = a(1 − e cos ξ).
(3.20)
Troviamo infine la relazione tra l’anomalia vera ψ e l’anomalia eccentrica ξ;
sostituendo in r =
p
a
p
1+e cos ψ
= (1 − e2 ) si trova:
la relazione r = a(1 − e cos ξ) e ricordando che
1 − e2 = (1 + e cos ψ)(1 − e cos ξ)
(3.21)
CAPITOLO 3. IL PROBLEMA DI KEPLERO
3.1.2
25
La anomalia media e l’equazione di Keplero
Continuiamo definendo un’altra anomalia; l’anomalia media l è definita come
l’angolo tra il perielio ed il raggio vettore r(t), descritto in un tempo t dal
raggio vettore stesso con velocità angolare ω costante:
l = ωt =
2πt
T
(3.22)
dove T è il periodo orbitale del pianeta.
In accordo con la seconda legge di Keplero la velocità areolare è costante e
quindi l’area indicata con A nella figura 3.4è:
A=
πabt
T
Ma quest’area è anche:
A = ab (areaSP ′X)
= b (areaOP ′ X − areaP ′ SX)
a
b
= 2a
[ξa2 − a2 e sin ξ]
= 12 ab [ξ − e sin ξ]
(3.23)
(3.24)
Dopo aver eguagliato le espressioni per A date dalla (3.23) e dalla (3.24), si
ricordi la (3.22), cosı̀ da ricavare:
l = ξ − e sin ξ.
(3.25)
La (3.25) è chiamata equazione di Keplero, la quale fornisce la relazione tra
l’anomalia eccentrica ξ e l’anomalia media l.
CAPITOLO 3. IL PROBLEMA DI KEPLERO
26
Figura 3.4:
3.2
Le variabili azione-angolo per il problema
di Keplero
L’ Hamiltoniana per un punto in un campo di forze centrali si scrive, facendo
uso di coordinate polari,
H(r, ϑ, pr , pϑ ) =
1 2 p2ϑ
(p + ) + V (r),
2m r r 2
(3.26)
dove m è la massa del punto, r, ϑ sono coordinate polari rispetto al centro delle
forze, pr , pϑ , e V (r) è l’energia potenziale. Nel caso Kepleriano si dovrà porre,
in particolare
V (r) = −
k
r
(3.27)
27
CAPITOLO 3. IL PROBLEMA DI KEPLERO
dove k è una costante. L’Hamiltoniana (3.26) ammette due integrali primi in
involuzione tra loro
M =p
ϑ
2
E = pr +
2m
M2
2mr 2
−
(3.28)
k
r
Per costruire le variabili azione, utilizzando le indicazioni del capitolo precedente, dobbiamo scrivere i momenti pr e pϑ in funzione degli integrali primi E
ed M:
pϑ = M
q
p = 2mE +
r
2mk
r
−
M2
r2
Il calcolo di Aϑ è banale, essendo ϑ ciclica:
I
Z 2π
1
1
pϑ dϑ = M
pϑ dϑ =
Aϑ =
2π γϑ
2π 0
(3.29)
(3.30)
Per quanto riguarda il calcolo di Ar specifichiamo che ci poniamo nel caso in
2
mk
cui Emin < E < 0, con Emin = − 2M
2 , per il quale abbiamo orbite chiuse di
forma ellittica:
1
Ar =
2π
1
pr dr =
2π
γr
I
I r
2mk M 2
− 2 dr
2mE +
r
r
γr
(3.31)
Per calcolare Ar parametrizziamo l’ellisse con due angoli opportuni: a tal fine
ben si prestano l’anomalia vera ψ oppure l’anomalia eccentrica ξ introdotte
nel paragrafo precedente.
Innanzitutto ricordiamo le relazioni tra le costanti E, M e gli elementi orbitali
a, e:
k
a=− ,
2E
e=
r
1+
2EM 2
mk 2
(3.32)
La parametrizzazione del ciclo γr mediante l’anomalia eccentrica ξ è espressa
dalle relazioni:
r = a(1 − e cos ξ) ⇒ dr = ae sin ξdξ
q
pr = mk e sin ξ
a (1−e cos ξ)
(3.33)
28
CAPITOLO 3. IL PROBLEMA DI KEPLERO
La prima relazione altro non è che l’ equazione dell’ ellisse nelle variabili r
ed ξ, già dedotta nel paragrafo precedente, equazione (3.20); la seconda si
ricava sostituendo nell’espressione di pr data dalla seconda delle (3.29), i valori
k
e M 2 = mka(1 − e2 ) ottenuti dalle (3.32), cosı̀ da ottenere:
E = − 2a
p2r
i
mka h r
2
2
= − 2 ( − 1) − e .
r
a
(3.34)
e sostituendo in quest’ultima espressione il valore di r dato dalla prima delle
(3.33).
La parametrizzazione di γr mediante l’anomalia vera ψ è invece espressa dalle
relazioni
r = a(1−e2 ) ⇒ dr =
1+e cos(ψ)
p = eM sin ψ
r
a(1−e2 )
(1+e cos(ψ))2
· e sin ψdψ
(3.35)
a(1−e2 )
La prima di queste relazioni altro non è che l’ equazione dell’ ellisse in coordinate polari, con l’ angolo ψ misurato a partire dal perielio, già dedotta
nel paragrafo precedente, equazione (3.17); la seconda si ottiene per semplice
sostituzione della prima di queste relazioni nella (3.34), in analogia a quanto
fatto sopra.
Tornando ora al calcolo di Ar notiamo dalla seconda delle (3.29) che:
pr = −
M2
mk 2mk
+
+ 2 ,
apr
rpr
r pr
quindi:
1
Ar =
2π
I
(−
γr
mk 2mk
M2
+
+ 2 )dr
apr
rpr
r pr
Per integrare i primi due termini si fa uso dell’ anomalia eccentrica ξ, mediante
le (3.33); per il terzo termine si ricorre invece all anomalia vera ψ, tramite le
(3.35). Si ottiene:
√
R 2π
Ar = − mka 0 (1 − e cos ξ)dξ +
√
p m
= mka − M = k − 2E
−M
√
2 mka
2π
R 2π
0
dξ −
M
2π
R 2π
0
dψ
29
CAPITOLO 3. IL PROBLEMA DI KEPLERO
Quindi abbiamo trovato l’espressione delle variabili azione in funzione degli
integrali primi:
Aϑ = M
p m
−M
Ar = k − 2E
(3.36)
Da queste equazioni si ricava l’espressione dell’Hamiltoniana nelle variabili
azione:
H′ = −
mk 2
2(Aϑ + Ar )2
(3.37)
Dall’ equazione (2.2) possiamo scrivere la funzione generatrice della trasformazione completamente canonica che va da (r, ϑ, pr , pϑ ) a (ϕr , ϕϑ , Ar , Aϑ ):
Z
S(r, ϑ, Ar , Aϑ ) = (pr (r, ϑ, Ar , Aϑ )dr + pϑ (r, ϑ, Ar , Aϑ )dϑ)
Questa è una funzione generatrice del secondo tipo di cui abbiamo parlato nel
primo capitolo, quindi possiamo trovare le variabili angolo (ϕr , ϕϑ ) grazie alle
equazioni di trasformazione (1.22):
ϕ = ∂S
r
∂Ar
ϕ = ∂S
ϑ
∂Aϑ
Ora, invertendo le equazioni (3.36) per scrivere gli integrali primi E, M in funzione delle variabili azione e sostituendo le espressioni ottenute nelle equazioni
(3.29), otteniamo:
q
p (r, ϑ, A , A ) = − m2 k2 +
r
r
ϑ
(Ar +Aϑ )2
p (r, ϑ, A , A ) = A
ϑ
r
ϑ
2mk
r
−
A2ϑ
r2
ϑ
Possiamo quindi calcolare le variabili angolo ϕr , ϕϑ .
R ∂pr (r,ϑ,Ar ,Aϑ )
R ∂pϑ (r,ϑ,Ar ,Aϑ )
∂S
=
dr
+
dr
ϕr = ∂A
∂A
∂Ar
r
r
R
2 k2
dr
= (Am
3
pr
r +Aϑ )
Usando le equazioni (3.33) otteniamo:
Z
ϕr = (1 − e cos ξ)dξ = ξ − e sin ξ
(3.38)
30
CAPITOLO 3. IL PROBLEMA DI KEPLERO
Passando a ϕϑ si ha:
ϕϑ =
=
∂S
∂Aϑ
=
R
m2 k 2
(Ar +Aϑ )3
R
∂pr (r,ϑ,Ar ,Aϑ )
dr
∂Aϑ
dr
pr
−
R
Aϑ dr
r 2 pr
+
+
R
R
∂pϑ (r,ϑ,Ar ,Aϑ )
dr
∂Aϑ
(3.39)
dϑ.
Il primo integrale dà nuovamente ϕr , mentre per il secondo si usano le (3.35),
ottenendo:
ϕϑ = ϕr + ψ + ϑ
Quindi, ricordando la definizione dell’anomalia vera data dalla (3.14), risulta:
ϕϑ = ϕr + ϑ0
(3.40)
Tornando alla nuova Hamiltoniana funzione delle variabili azione data da (3.37)
si nota che le frequenze proprie del moto sono uguli, infatti:
ϕ˙r =
=
∂H
∂Ar
= ϕ˙ϑ =
∂H
∂Aϑ
mk 2
(Aϑ +Ar )3
Questo vuol dire che il sistema è completamente degenere e quindi può essere
utile introdurre delle nuove variabili angolo che indichiamo con l e g definite
cosı̀:
l = ϕ = ξ − e sin ξ
r
g = ϕ −ϕ = ϑ
ϑ
r
0
(3.41)
Quindi notiamo che g è l’argomento del perielio, mentre l è l’anomalia media
in quanto la prima delle (3.41) coincide con la (3.25).
Indichiamo con L e G le variabili azione coniugate rispettivamente a l e g,
ottenute con la trasformazione completamente canonica con funzione generatrice:
F (ϕr , ϕϑ , L, G) = ϕr L + (ϕϑ − ϕr )G
E’ facile verificare che:
L = A + A = √mka
r
ϕ
√
G = A = mka(1 − e2 ) 12 = L√1 − e2 .
ϑ
(3.42)
CAPITOLO 3. IL PROBLEMA DI KEPLERO
31
Nelle nuove azioni l’Hamiltoniana assume la forma:
mk 2
H(L, G, l, g) = − 2
2L
(3.43)
Capitolo 4
Teoria perturbativa
Solo una piccolo minoranza dei sistemi Hamiltoniani è integrabile, e tali sistemi
non sono in generale i sistemi Hamiltoniani associati ai più interessanti sistemi
meccanici. Uno dei più famosi problemi non integrabili è il problema dei tre
corpi. Mentre, come abbiamo visto il problema dei due corpi corrisponde ad
un sistema integrabile, l’aggiunta di un terzo corpo rende la soluzione del moto
molto difficile. D’altra parte, la rilevanza del problema di n corpi per lo studio
del sistema planetario è evidente. Per tale motivo sono stati elaborati metodi
di soluzione approssimata di problemi di questo tipo, basati sul fatto che, in
opportune circostanze, ci si può ricondurre ad una piccola perturbazione di un
problema integrabile.
In generale, quindi, ci proponiamo di esaminare il comportamento di un sistema Hamiltoniano ad n gradi di libertà la cui Hamiltoniana H̄ε (p, q) si possa
scrivere come
H ε (p, q) = H0 (p, q) + εH1 (p, q)
(4.1)
con H0 Hamiltoniana di un sistema canonicamente integrabile, H1 una funzione regolare ed ε un parametro piccoloda individuarsi, in questo caso nel
rapporto
mG
.
mS
Le considerazioni che svolgeremo nel seguito saranno valide per
32
33
CAPITOLO 4. TEORIA PERTURBATIVA
ε sufficientemente piccolo. Ricordiamo che per un sistema integrabile è possibile trovare una trasfomazione canonicamente integrabile Ψ0 : (p, q) ∈ Γp,q →
(A, ϕ) ∈ I × Tn con ϕ) ∈ Tn tale che H0 (A, ϕ) = h(A). Nelle variabili A, ϕ
l’Hamiltoniana H̄ε (p, q) è trasformata in
Hε (A, ϕ) = h(A) + εf (A, ϕ)
(4.2)
dove f (A, ϕ) è una funzione periodica, di periodo 2π degli angoli ϕ.
In
corrispondenza, il sistema Hamiltoninano diviene
∂f
Ȧ = −ε ∂ϕ
∂f
ϕ̇ = ω(A) + ε ∂A
con ω(A) =
(4.3)
∂h
∂A
Vogliamo confrontare le soluzioni del sistema 4.3 con quelle del sistema imperturbato corrispondente ad ε = 0 che sono:
A = A(0)
ϕ = ϕ(0) + ω(A(0) )(t − t0 )
(4.4)
dove A(0) e ϕ(0) sono dati iniziali assegnati, espressi in termini delle variabili
azione-angolo.
Posto T l’ intervallo temporale entro il qualle si vogliono delle stime attendibili
della soluzione approssimata, se T è molto piccolo rispetto ad ε−1 , l’errore che
si commette trascurando la perturbazione εf rispetto all’ Hamiltoniana imperturbata è anch’esso piccolo. D’altra parte, in molti casi si è interessati a
comportamenti del sistema per tempi lunghi, cioè almeno dell’ordine di ε−1 .
Questo è ad esempio il caso del sistema planetario, per il quale sono interessanti informazioni su tempi molto lunghi. In questi casi non è accettabile
trascurare la perturbazione in quanto le previsioni cosı̀ ottenute sono largamente inattendibili.
L’idea del metodo delle perturbazioni è trasformare il sistema Hamiltoniano
34
CAPITOLO 4. TEORIA PERTURBATIVA
4.3 con Hamiltoniana della forma (4.2) , con nuove funzioni h′ ed f ′ e con il
parametro ε sostituito da εm con m ≥ 2. Per fissare le idee, consideriamo il
caso m = 2. Vogliamo determinare una trasformazione canonica Ψ in modo
che in termini delle nuove variabili (A′ , ϕ′ ), l’Hamiltoniana divenga
H ′ ε (A′ , ϕ′ ) = hε (A′ ) + ε2 f ′ (A′ , ϕ′ )
(4.5)
ed il sistema Hamiltoniano si scriva
′
∂f
Ȧ′ = −ε2 ∂ϕ
′
′
∂f
ϕ̇′ = ωε′ (A′ ) + ε2 ∂A
′
con ωε′ (A′ ) =
(4.6)
∂hε (A′ )
∂A′
Le soluzioni del sistema 4.6 in cui si trascurano i termini di ordine ε2 sono
allora
A′ (t) = A′(0)
ϕ′ (t) = ϕ′(0) + ω ′ (A′(0) )(t − t0 )
(4.7)
dove A′(0) e ϕ′(0) sono dati iniziali, espressi in termini delle nuove variabili
azione-angolo.
Se si trascura il termine di ordine ε2 nel sistema 4.6 si ottengono informazioni
attendibili per tempi piccoli rispetto ad ε2 , con un evidente miglioramento
rispetto al sistema 4.3.
Vogliamo fornire un metodo per determinare la trasformazione canonica Φ
dipendente da ε in modo che l’Hamiltoniana trasformata sia della forma 4.5.
Per fare ciò usiamo il metodo della funzione generatrice. Cerchiamo quindi
una funzione delle vecchie coordinate e dei nuovi impulsi,
Sε (A′ , ϕ) = A′ ϕ + Φε (A′ , ϕ)
con
Φ0 (A′ , ϕ)
(4.8)
Le variabili A′ e ϕ dipendono da ε, ma, per brevità, lasceremo tale dipendenza
sottointesa.
CAPITOLO 4. TEORIA PERTURBATIVA
35
Le relazioni tra vecchie e nuove variabili sono date da
A = A′ +
ϕ′ = ϕ +
∂Φε (A′ ,ϕ)
∂ϕ
∂Φε (A′ ,ϕ)
∂A′
(4.9)
Perchè la nuova Hamiltoniana Hε′ sia della forma 4.5 deve valere
Hε (A′ +
∂Φε (A′ , ϕ)
, ϕ) = hε (A′ ) + o(ε2 )
∂ϕ
(4.10)
Riassumendo, si tratta di di determinare Φε , hε e l’errore o(ε2 ) in modo da
rendere soddisfatta la (4.10). Si possono cercare sotto forma di serie di potenze
in ε:
Φε = Φ0 + εΦ1 + . . .
(4.11)
hε = h0 + εh1 + . . .
In realtà non vi è bisogno di pensare ad una serie infinita in quanto solo i primi
termini saranno realmente rilevanti. Per ipotesi abbiamo Φ0 = 0. Espandendo
il membro sinistro della (4.10) in potenze di ε, si ha
′
∂Φε (A′ , ϕ)
′
′ ∂Φ1 (A , ϕ)
′
′
, ϕ) = h(A ) + ε ω(A )
+ f (A , ϕ) + o(ε2 )
Hε (A +
∂ϕ
∂ϕ
(4.12)
La relazione (4.10) può scriversi allora:
′
′
′
′
′
′ ∂Φ1 (A , ϕ)
+ f (A , ϕ) − h1 (A ) + o(ε2 ) = 0 (4.13)
h(A ) − h0 (A ) + ε ω(A )
∂ϕ
Dovendo tale relazione essere valida nel limite ε → 0, si ottiene
h0 (A′ ) = h(A′ )
(4.14)
Dividendo per ε, nel limite ε → 0 si ha anche
ω(A′ )
∂Φ1 (A′ , ϕ)
+ f (A′ , ϕ) = h1 (A′ )
∂ϕ
(4.15)
La (4.14) determina h0 . Mostriamo che la (4.15) determina h1 e Φ1 Data una
funzione g su Tn , useremo la notazione
Z
1
dϕg(ϕ)
g=
(2π)n Tn
(4.16)
36
CAPITOLO 4. TEORIA PERTURBATIVA
Per indicarne la media sul toro Tn . Poichè evidentemente
Z
∂Φ1 (A′ )
∂Φ1 (A′ , ϕ)
1
dϕ
=
=0
∂ϕ
(2π)n Tn
∂ϕ
(4.17)
Mediando la (4.15) sul toro Tn si ottiene
1
h1 (A ) = f (A ) =
(2π)n
′
′
Z
dϕf (A′ , ϕ)
(4.18)
Tn
e pertanto h1 è determinata come media di f sul toro Tn . Sostituendo tale
espressionein 4.15 si pttiene allora
ω(A′ )
∂Φ1 (A′ , ϕ)
= −[f (A′ , ϕ) − f(A′ )]
∂ϕ
(4.19)
Ogni soluzione Φ1 regolare di (4.19) definita ameno di una funzione arbitraria
di A′ , fornisce per ε sufficientemente piccolo la funzione generatrice Sε (A′ , ϕ) =
A′ ϕ + εΨ1 (A′ , ϕ) di una trasformazione canonica Φ della forma
′
(A ,ϕ)
A′ = A − ε ∂Φ1∂ϕ
(4.20)
′
(A ,ϕ)
ϕ′ = ϕ + ε ∂Φ1∂A
′
che può riscriversi
A′ = A −
ϕ′ = ϕ +
∂Φε (A,ϕ)
+ o(ε2 )
∂ϕ
∂Φε (A,ϕ)
+ o(ε2 )
∂A′
(4.21)
e che trasforma l’Hamiltoniana in
H ′ (A′ , ϕ′ ) = h(A′ ) + εh1 (A′ ) + o(ε2 )
(4.22)
2
Infatti la condizione di non singolarità della matrice DA,ϕ
Sε è verificata dal
momento in cui, per ε sufficientemente piccolo, Sε differisce di poco dalla
funzione generatrice dell’identità.
L’argomento precedente può essere reso più accurato considerando potenze più
elevate di ε. Ad esempio, continuando fino al secondo ordine si otterrebbe la
condizione
h + ε(ω ·
∂Φ1
)
∂ϕ
+ε ω·
2
∂Φ2
∂ϕ
= h0 + εh1 + ε2 h2 + o(ε3 )
+
∂f
∂A
·
∂Φ1
∂ϕ
+
∂ω
∂A
·
∂Φ1
∂ϕ
2 + o(ε3 )
37
CAPITOLO 4. TEORIA PERTURBATIVA
Pertanto, accanto alle (4.14) e (4.15) si avrebbe un ulteriore condizione
h2 (A′ ) = ω ·
∂Φ2 (A′ , ϕ)
+ N2 (A′ , ϕ)
∂ϕ
con
∂ω
∂f ∂Φ1
·
+
·
N2 =
′
∂A ∂ϕ
∂A′
∂Φ1
∂ϕ
2
(4.23)
(4.24)
Continuando fino all’ordine εm , si avrebbe allo stesso modo
hl (A′ ) = ω ·
∂Φl (A′ , ϕ)
+ Nl (A′ , ϕ)
∂ϕ
l = 1, . . . , m
(4.25)
dove Nl (A′ , ϕ) è un polinomio nelle variabili
Φi (A′ , ϕ)
∂ϕ
i = 1, . . . , l − 1
(4.26)
con coefficienti proporzionali ad f , h e alle loro derivate fino all’ordine l. L’espressione di hl si ottinene immediatamente mediando la relazione (4.25) sul
toro Tn .
Si ha
hl (A′ ) = Nl (A′ )
(4.27)
Conseguentemente la (4.25) diventa
ω(A′) ·
h
i
∂Φl (A′ , ϕ)
= − Nl (A′ , ϕ) − Nl (A′ , ϕ)
∂ϕ
(4.28)
che è analoga alla (4.19) con Nl in luogo di f .
In tutti questi casi ci siamo ricondotti alla risoluzione di un’equazione della
forma
ω(A′) ·
∂Ψ(A′ , ϕ)
= g(A′ , ϕ)
∂ϕ
(4.29)
con g soddisfacente la condizione g = 0. La soluzione di tale equazione può
essere determinata in termini di serie di Fourier.
Risolveremo a titolo di esempio la (4.29) nel caso l = 1 in corrispondenza del
quale si ha g = −[f − f¯]. Una classe di g spesso rilevante per le applicazioni
38
CAPITOLO 4. TEORIA PERTURBATIVA
è quella definita dall’assunzione che g sia un polinomio trigonometrico e cioè
che esista un N > 0 tale che g possa scriversi
X
g(A′, ϕ) =
ĝk (A′ )eik·ϕ
(4.30)
k ∈ Zn
|k| ≤ N
con fk (A′ ) funzioni regolari di A′ a valori complessi ∀ |k| ≤ N. Si assuma
inoltre che per gli stessi |k| ≤ N valga la condizione
|ω(A′) · k|−1 ≤ C,
∀A′ ∈ I
(4.31)
per un’opportuna costante C > 0 e k 6= 0 Poichè Ψ è una funzione regolare su
Tn , essa ammette uno sviluppo in serie di Fourier della forma:
Ψ(A′ , ϕ) =
X
Ψ̂k (A′ )eik·ϕ
k∈Zn
dove Ψ̂k sono i coefficienti di Fourier di Ψ, dati da:
Z
1
′
dϕψ(A′ , ϕ)e−ik·ϕ
ψ̂k (A , ϕ) =
(2π)n Tn
(4.32)
La derivata di ψ rispetto a ϕ è anch’essa espressa come una serie di Fourier, e
cioè
X
∂ψ ′
ik ψ̂k (A′ )eik·ϕ
(A , ϕ) =
∂ϕ
k∈Zn
(4.33)
Sostituendo la (4.32) e (4.33) nella (4.19) si ottiene allora
i[ω(A′ ) · k]ψ̂k (A′ ) + ĝk = 0,
k 6= 0
(4.34)
Per k = 0 deve valere la condizione di compatibilità ĝ = 0 in quanto k ·
ω = 0 per k = 0. Questa condizione è identicamente verificata in quanto
ĝ0 = g = 0 per ipotesi. Nel caso g = −[f − f], l’ipotesi g = 0 è soddisfatta;
ricordiamo infatti la presenza del termine f è dovuta alla scelta di h1 , scelta
39
CAPITOLO 4. TEORIA PERTURBATIVA
che pertanto rende soddisfatta la condizione di compatibilità. Per k 6= 0, grazie
alla condizione (4.31), l’equazione (4.34) può essere risolta e fornisce
ψ̂k (A′ ) = −
ĝk (A′ )
iω(A′ ) · k
(4.35)
In particolare, per |k| > N risulta quindi ψ̂k (A′ ) = 0 e pertanto anche ψ è un
polinomio trigonometrico. La condizione (4.31) assicura poi che la precedente
espressione sia ben definita. Il coefficiente di Fourier ψ̂0 non è determinato
dall’equazione, in accordo con il fatto che la ψ è definita a meno di una funzione
arbitraria di A′ .
In definitiva, nel caso g = −[f − f ] con f polinomio di Fourier di grado N,
le precedenti relazioni forniscono l’espressione di Φ1 a meno di una funzione
arbitraria di A′ . Per fissare univocamente la funzione generatrice, scegliamo
(0)
il coefficiente di Fourier Φ1 corrispondente a k = 0, Φ̂1 = 0. In conclusione
otteniamo
Φ1 (A′ , ϕ) =
X
k ∈ Zn
−
fˆk (A′ ) ik·ϕ
e
iω(A′ ) · k
(4.36)
|k| ≤ N
L’espressione (4.36) rappresenta una funzione ben definita delle variabili A′ e
ϕ per (A′ , ϕ) ∈ I × Tn . La funzione
Sε (A′ , ϕ) = A′ · ϕ + εΦ1 (A′ , ϕ)
rappresenta la funzione generatrice della trasformazione canonica.
(4.37)
Capitolo 5
La Precessione di Mercurio
In questo capitolo mostreremo un esempio pratico di applicazione della teoria
delle perturbazioni esposta nel capitolo precedente; tratteremo il problema dei
tre corpi in una forma molto semplificata.
Nel capitolo 3, risolvendo il problema dei due corpi, avevamo osservato come
un pianeta orbitante intorno al Sole descrive un’ellisse fissa nel piano; questo
comportava che l’argomento del perielio del pianeta non cambiasse.
L’introduzione di un terzo corpo perturba il sistema, rendendolo non integrabile.
Nel nostro caso i tre corpi sono: il Sole, Mercurio e Giove.
Ripercorrendo i passi concettuali della teoria delle perturbazioni consideriamo
il sistema Sole-Mercurio come il sistema integrabile, mentre l’effetto di Giove
su Mercurio rappresenta la perturbazione; l’obiettivo finale è calcolare la precessione del perielio di Mercurio sotto l’influenza di Giove.
Per affrontare tale problema, assumeremo le seguenti ipotesi semplificatrici:
• Mercurio non influenza il moto del sistema Sole-Giove;
• I tre corpi si trovano su un piano fisso;
40
41
CAPITOLO 5. LA PRECESSIONE DI MERCURIO
• Giove si muove su una circonferenza (la sua eccentricità è nulla).
Fissato un sistema di riferimento inerziale, indichiamo con ~rG e ~r rispettvamente i vettori Sole-Giove e Sole-Mercurio.
Denotiamo con k la costante gravitazionale e con MS , MG e MM le masse del
Sole, Giove e Mercurio.
Con queste ipotesi l’accelerazione del Sole vale:
~aS = kMG
~rG
|~rG |3
(5.1)
dove ~rG è il vettore congiungente il Sole a Giove. L’accelerazione inerziale di
Mercurio è data da ~a = ~aM + ~aS dove ~aM è l’accelerazione di Mercurio nel
sistema di riferimento eliocentrico con ~aM = ~r¨. Quindi le equazioni del moto
di ~r, posto ε =
MG
MS
≃ 10−3 , sono
−~
rG
M(~r¨ + ~aS ) = −kMS MM |~r~r|3 − kMG MM |~r~r−~
rG | 3
oppure
−~
rG
~r¨ = −kMS |~r~r|3 − εkMS |~r~r−~
− εkMS |~r~rGG|3
rG | 3
(5.2)
Ponendo K = kMS , l’ultima espressione rappresenta l’equazione di Hamilton
per l’Hamiltoniana
H(~p, ~r, T, β) =
K
εK
~rG · ~r
p~2
−
−
+ εK
+ ω(T )T
2
|~r| |~r − ~rG (β)|
|~rG (β)|3
(5.3)
dove ω(T ) rappresenta la velocità angolare media di Giove e ~rG (β) è la funzione
che esprime la posizione di Giove in termini della sua anomalia media β, in
modo che, in termini del tempo t, la posizione attuale di Giove, per qualche
β0 è data da
~rG (t) = ~rG (β) = ~rG (β0 + ω(T )t)
(5.4)
La prima parte nell’applicazione della teoria delle perturbazioni è scrivere
l’Hamiltoniana (5.3) in termini delle variabili azione-angolo.
Per ε = 0 il sistema (5.3) è integrabile ed ha tre gradi di libertà (due per
42
CAPITOLO 5. LA PRECESSIONE DI MERCURIO
Mercurio e uno per Giove).
Chiamiamo L, G, l, g le coordinate azione-angolo del problema dei due corpi
(dato dal sistema Sole-Mercurio) trovate nel capitolo 3 e date dalle equazioni
(3.41) e (3.42).
Le variabili T, β sono le variabili azione-angolo di Giove.
Indichiamo con H0 (L, T ) l’Hamiltoniana libera del sistema imperturbato, la
cui espressione è
H0 (L, T ) = −
K2
+ ω(T )T
2L2
(5.5)
Di conseguenza l’Hamiltoniana perturbata (5.3) si riscrive:
Hε (L, G, T, l, g, β) = H0 (L, T )−ε
K
2
(rG
+ r 2 − 2rrG cos(ψ + g − β))
1
2
+ε
2
rG
Kr
,
cos(ψ + g − β)
(5.6)
dove ψ è l’anomalia vera di Mercurio.
Tramite le relazioni trovate nel capitolo 3, è facile scrivere l’anomalia eccentrica ξ e l’anomalia vera ψ di Mercurio come serie di potenze dell’eccentricità e
con coefficienti funzioni dell’anomalia media l:
ξ = l − e sin l + e2 c2 (l) + e3 c3 (l) + e4 c4 (l) + . . .
ψ = l − 2e sin l + e2 b2 (l) + e3 b3 (l) + e4 b4 (l) + . . .
(5.7)
L’ espressione (5.6) può essere scritta in termini dei polinomi di Legendre
utilizzando la seguente formula:
1
1
(1+x2 −2xz) 2
=
P∞
n=0 (x)
n
n
Pn (z) dove
d
2
n
Pn (z) = (2n n!) dz
n [(z − 1) ]
CAPITOLO 5. LA PRECESSIONE DI MERCURIO
43
da cui si ha P0 (z) = 1, P1 (z) = z, P2 (z) = 12 [3z 2 − 1].
Nel nostro caso x =
r
rG
e z = cos(ψ + g − β). In questo modo la (5.3) diventa:
∞
K
K X r n
Hε (L, G, T, l, g, β) = H0 (L, T ) − ε + ε
( ) Pn (cos(ψ + g − β)) (5.8)
rG
rG n=2 rG
Trascuriamo i termini della serie con n ≥ 3 per semplficare i conti, ottenendo:
Hε (L, G, T, l, g, β) = H0 (L, T ) − ε
K
K r 1
− ε ( )2 (3 cos2 (ψ + g − β) − 1)
rG
rG rG 2
Per un’ulteriore semplificazione da cui in avanti trascuriamo anche il termine −ε rKG in quanto, essendo una costante che non dipende dalle variabili
azione, non dà alcun contributo nel calcolo delle frequenze proprie del moto.
Riscriviamo allora l’ Hamiltoniana:
Hε (L, G, T, l, g, β) = H0 (L, T ) − ε
K r 21
( ) (3 cos2 (ψ + g − β) − 1)
rG rG 2
(5.9)
L’Hamiltoniana (5.9) è della forma di quella introdotta nel capitolo 4 con
l’espressione (4.2); chiaramente la funzione f , periodica nelle variabili angolo,
nel nostro caso è:
f (L, G, T, l, g, β) = −
K r 21
( ) (3 cos2 (ψ + g − β) − 1)
rG rG 2
(5.10)
Ancora, però, non possiamo applicare la teoria delle perturbazioni perché
l’Hamiltoniana del sistema integrabile H0 (L, T ) non dipende dalla variabile
azione G; ciò comporta che ωG =
∂H0 (L,T )
∂G
= 0 e quindi non è soddisfatta la
condizione (4.31), necessaria per poter utilizzare le formule ricavate nel capitolo 4.
Per ovviare a questo problema possiamo provare a riscrivere Hε (L, G, T, l, g, β)
in una nuova forma del tipo:
Hε (L, G, T, l, g, β) = h(L, G, T ) + εṼ (L, G, T, l, g, β),
(5.11)
CAPITOLO 5. LA PRECESSIONE DI MERCURIO
44
in modo tale che h dipenda da tutte le variabili azione e Ṽ sia una funzione
periodica nelle variabili angolo; cerchiamo h e Ṽ che soddisfino tali caratteristiche.
Iniziamo col calcolare la media di f (L, G, T, l, g, β) sul toro tridimensionale
definito dagli angoli l, g, β dopo aver sostituito in (5.10) la (3.20):
ZZZ
1
dldgdβ
K a 2
(1−e cos ξ)2 (3 cos2 (ψ+g−β)−1)
(5.12)
π0 (L, G) = − ( )
rG rG
2
(2π)2
T3
Dalla seconda delle (5.7) si nota che ψ ≃ l; con il seguente cambio di variabili:
β′ = l + g − β
l′ = l
g′ = g
la (5.12) diventa:
K a
π0 (L, G) = − ( )2
rG rG
Z
2π
0
dl
(1 − e cos ξ)
2π
2
Z
0
2π
1
dβ
(3 cos2 β − 1) ,
2
2π
che per via della (3.25) equivale a:
Z
Z 2π
K a 2 2π
1
dβ
3 dξ
π0 (L, G) = − ( )
(1 − e cos ξ)
(3 cos2 β − 1) .
rG rG
2π 0 2
2π
0
Con un rapido calcolo si ottiene
π0 (L, G) = −
3e2
K a 21
( ) (1 +
).
rG rG 4
2
(5.13)
A questo punto ricordiamo che il semiasse maggiore a e l’eccentricità e di
Mercurio, sono legati ad L e G dalle relazioni:
q
2
e= 1− G
L2
a=
L2
,
K
che ci permettono di scrivere la (5.13) cosı̀:
5 L4
3 G2 L2
π0 (L, G) = − 3 +
3
8 rG K 8 rG
K
(5.14)
45
CAPITOLO 5. LA PRECESSIONE DI MERCURIO
Se definiamo h e Ṽ come segue:
h(L, G, T ) = H0 (L, T ) + επ0 (L, G)
(5.15)
Ṽ (L, G, T, l, g, β) = f (L, G, T, l, g, β) − π0 (L, G)
(5.16)
riusciamo a scrivere un’Hamiltoniana della forma (5.11) equivalente a (5.9) in
maniera da poter finalmente applicare la teoria delle perturbazioni.
Cerchiamo una trasformazione canonica Ψ : (L, G, T, l, g, β) → (L′ , G′ , T ′ , l′ , g ′, β ′ )
tale che la (5.11) divenga:
Hε′ (L′ , G′ , T ′, l′ , g ′, β ′) = hε (L′ , G′ , T ′ ) + ε2 V˜ ′ (L′ , G′ , T ′ , l′ , g ′ , β ′),
(5.17)
con hε (L′ , G′ , T ′) = h0 (L′ , G′ , T ′) + εh1 (L′ , G′ , T ′ ).
Dalla (4.37) sappiamo che Ψ ha una funzione generatrice della forma:
Sε (L′ , G′ , T ′ , l, g, β) = L′ l + G′ g + T ′ β + εΦ1 (L′ , G′ , T ′ , l, g, β).
Dalle (4.14) e (4.18) si determinano h0 (L′ , G′ , T ′ ) e h1 (L′ , G′ , T ′ ):
h0 (L′ , G′ , T ′ ) = h(L′ , G′, T ′ ) = H0 (L′ , T ′ ) + επ0 (L′ , G′ );
h1 (L′ , G′ , T ′) = Ṽ (L′ , G′ , T ′) = 0.
(5.18)
(5.19)
Si osserva che h1 = 0 perchè per costruzione Ṽ è a media nulla.
Prima di procedere con il calcolo della precessione del perielio di Mercurio
dobbiamo verificare l’effettiva possibilità di trovare la trasformazione Ψ.
Notiamo che Ṽ è una funzione periodica delle variabili angolo del sistema,
quindi riscrivibile come serie di Fourier; per semplificare i calcoli ci piacerebbe
che fosse un polinomio trigonometrico di un certo ordine N.
Se sostituiamo le (5.7) nell’espressione di Ṽ e trascuriamo gli ordini maggiori
o uguali ad e5 ≃ 10−3 = ε (essendo l’eccentricità di Mercurio pari a e ≃ 0.206)
46
CAPITOLO 5. LA PRECESSIONE DI MERCURIO
allora Ṽ può essere considerato un polinomio trigonometrico di ordine N = 4:
Ṽˆν (a, e)ei(lν1 +gν2 +βν3 )
X
Ṽ (L, G, T, l, g, β) =
(5.20)
ν ∈ Z3
0 < |ν| ≤ 4
Dobbiamo verificare che sia soddisfatta la (4.31); quindi, denotando con:
ωL′ =
∂hε ′ ′ ′
(L , G , T )
∂L′
ω G′ =
∂hε ′ ′ ′
(L , G , T )
∂G′
ωT ′ =
∂hε ′ ′ ′
(L , G , T ),
∂T ′
dobbiamo verificare che valga:
ωL′ ν1 + ωG′ ν2 + ωT ′ ν3 6= 0
(5.21)
ossia
(ωL − ε Kr1 3 52 L′3 + ε Kr1 3 34 G′2 L′ )ν1 + (ε Kr1 3 43 G′ L′2 )ν2 + (ωT ′ )ν3 6= 0
G
G
con la condizione
che è verificata poiché
G
ν 6= 0,
ωT ′
ωL
con
(5.22)
|ν1 |, |ν2 |, |ν3| ≤ 4
≃ 49.
Tramite la (4.36) troviamo Φ1 :
′
′
X
′
Φ1 (L , G , T , l, g, β) =
ν ∈ Z3
Ṽˆν (L′ , G′ , T ′ ) i(lν1 +gν2 +βν3 )
−
e
iω(A′ ) · ν
(5.23)
0 < |ν| ≤ 4
dove:
Ṽˆν (L′ , G′ , T ′ ) =
1
(2π)3
ZZZ
Ṽ (L′ , G′ , T ′ , l, g, β)e−i(lν1+gν2 +βν3 ) dldgdβ. (5.24)
T3
Questo conclude la determinazione della trasformazione canonica Ψ.
Ora possiamo finalmente determinare la precessione del perielio di Mercurio; in precedenza abbiamo già mostrato che:
ġ ′ = ωG′ = ε
1 3 ′ ′2
GL .
3
KrG
4
(5.25)
47
CAPITOLO 5. LA PRECESSIONE DI MERCURIO
Avendo trovato l’espressione di Φ1 possiamo scrivere l’equazione di trasformazione tra g e g ′:
g′ =
∂Φ1
∂Sε (L′ , G′ , T ′ , l, g, β)
= g+ε ′ (L′ , G′ , T ′, l, g, β)
′
∂G
∂G
=⇒
g ′−g = o(ε)
(5.26)
Quindi, fino all’ordine o(ε2 ) la velocità angolare della precessione di Mercurio
vale:
ġ = ωprecessione = ε
1 3 ′ ′2
arcsec
G L = 154.67
3
KrG 4
century
(5.27)
Bibliografia
[1] G.Gallavotti, The Elements of Mechanics
[2] G.Gallavotti, Quasi-integrable Mechanical Systems
[3] R. Esposito, Meccanica Razionale
[4] H. Goldstein, Meccanica Classica
[5] L. Landau, Meccanica
[6] R. Rosso, Appunti di Teoria di Sistemi Dinamici
[7] L. Galgani,A. Carati, Dispense di Meccanica Razionale II
[8] A. Giorgilli, Appunti del Corso di Meccanica Celeste
[9] M. Valtonen, H. KarttunenThe Three-Body Problem
48