CAPITOLO 1 - P
OTORE A CORRENTE CONTINUA AD ECCITAZIONE INDIPENDENTE
1.6 - Esercizi
1.6.1 - Esercizio 1
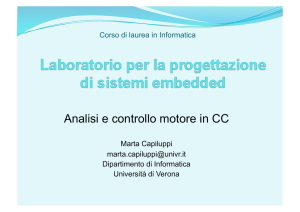
Una gru sollevatrice deve sollevare 10 tonnellate ad una velocità V2 di 0.25 m/s. Il gancio è
montato su una carrucola a singola puleggia. Un capo del cavo di sollevamento è ancorato al carrello
della gru e l'altro è avvolto in un tamburo di 25 cm di diametro. Il tamburo è comandato in rotazione
da un ingranaggio con rapporto di riduzione 45 a 1 [Fig.1.6.1.1].
Fig.1.6.1.1 - Gru sollevatrice
Si può supporre che l'intero meccanismo abbia un rendimento η = 60%. Determinare:
• la potenza PN e la velocità di targa ΩN del motore
• la coppia frenante esercitata dal motore quando esso rallenta la discesa del carico a 0.3 m/s
a) Calcolo della potenza del motore.
La potenza meccanica necessaria per il sollevamento del peso è data da
Pmecc = Fp V2 = 10000 ⋅ 9 . 8 ⋅ 0. 25 = 24500 W
(1.6.1.1)
Tenendo conto del rendimento (η = Putile/Pprodotta) occorre prevedere un motore di potenza di:
P
24500
PN = mecc =
= 40833 W
η
0. 6
(1.6.1.2)
b) calcolo della velocità nominale del motore
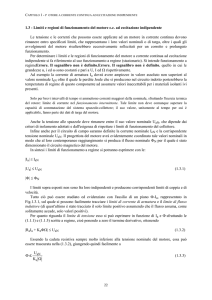
Il rapporto di riduzione 45:1 significa che la velocità Ω1 dopo il riduttore (verso il carico) è 45
volte più piccola di quella dell'albero motore, ΩN. Osservando la Fig.1.6.1.2 è facile inoltre rendersi
conto che la velocità periferica del tamburo avvolgitore è doppia rispetto alla velocità del carico.
34
CAPITOLO 1 - P
OTORE A CORRENTE CONTINUA AD ECCITAZIONE INDIPENDENTE
fisso
l 1 l1 h
2h
V1
l 2 -h l 2
h
Carico
1
V2 = 2 V1
Fig.1.6.1.2 - Velocità di sollevamento e velocità di avvolgimento
La velocità angolare del tamburo avvolgitore risulta dunque:
V 2 V2 2 ⋅ 0. 25
=
= 4 rad / s
Ω1 = 1 =
0.125
r
r
(1.6.1.3)
La velocità nominale del motore risulta pertanto:
Ω N = 45 ⋅ Ω2 = 45 ⋅ 4 = 180 rad / s
(1.6.1.4)
e la coppia vale:
TN =
PN
ΩN
=
40833
180
= 227 Nm
(1.6.1.5)
c) calcolo della coppia frenante
Si può impostare un bilancio delle potenze; la potenza meccanica sviluppata dal carico durante la
discesa, calcolata con la (1.6.1.1) sostituendo a V2 la velocità di discesa (0.3 m/s), vale
Pmecc, f = Fp V2 = 10000 ⋅ 9 . 8 ⋅ 0. 3 = 29400 W
(1.6.1.6)
Ora è il carico ad imporre il movimento, per cui le perdite vanno considerate in senso inverso; la
potenza elettrica risulta allora
PNf = η ⋅ Pmecc, f = 0. 6 ⋅ 29400 = 17640 W
(1.6.1.7)
La velocità del motore (negativa, rispetto alla precedente) si calcola come :
2 ⋅ 0. 3
V
Ω Nf = Ω1f ⋅ 45 = 1f ⋅ 45 =
⋅ 45 = 216 rad / s
0.125
r
(1.6.1.8)
La coppia sviluppata dal motore è infine data dal rapporto tra la potenza sviluppata dal motore e la
sua velocità:
TNf =
PNf
Ω Nf
=
17640
216
= 81. 6 Nm
(1.6.1.9)
35
CAPITOLO 1 - P
OTORE A CORRENTE CONTINUA AD ECCITAZIONE INDIPENDENTE
Si può a questo punto svolgere una considerazione a proposito dei due punti di funzionamento P1 e
P2, relativi rispettivamente al caso del sollevamento e della discesa frenata. Tali punti sono per
semplicità riportati nel diagramma coppia-velocità in Fig.1.6.1.3:
Fig.1.6.1.3 - Punti di funzionamento in sollevamento e in frenatura
Nel dimensionare l'azionamento, ci sono due effettivamente due possibilità; la prima consiste nel
considerare ΩNf = 216 rad/s come velocità base, alla quale deve essere possibile ottenere comunque la
massima coppia richiesta durante qualunque funzionamento (dunque, T=227 Nm); in questo caso
l'azionamento avrebbe un convertitore dimensionato per una potenza di circa 49 KW, sicuramente
esuberante per l'applicazione in oggetto, dato che nessuno dei due punti di funzionamento previsti
richiedono contemporaneamente massima velocità e coppia.
Vi è allora una seconda possibilità, che consiste nell'assumere ΩN = 180 rad/s come velocità base,
alla quale l'azionamento deve erogare la coppia di 227 Nm (punto P1); si può poi prevedere un
deflussaggio, con una curva tale da poter erogare una coppia ridotta (81.6 Nm) ad una velocità
superiore a quella base (216 rad/s). In questo caso, il convertitore andrebbe dimensionato per una
potenza di circa 40.8 KW, con evidente vantaggio economico, a dimostrazione dell'efficacia e
dell'opportunità del funzionamento in deflussaggio in particolari applicazioni industriali.
1.6.2 - Esercizio 2
Si consideri il meccanismo riportato in Fig.1.6.2.1. Il momento d'inerzia del motore è JN = 1
Kgm2; il cambio ha un rapporto di riduzione 10:1 ed il suo momento d'inerzia Jr, riferito al motore, è
pari a 0.2 Kgm2. Il tamburo dell'argano ha un raggio r = 0.3 m ed un momento d'inerzia Jtamb=3 Kgm2.
Il carico ha massa Mp= 1000 Kg.
Fig.1.6.2.1 - Meccanismo di sollevamento
36
CAPITOLO 1 - P
OTORE A CORRENTE CONTINUA AD ECCITAZIONE INDIPENDENTE
Assumendo che gli alberi di trasmissione ed il cavo siano anelastici, calcolare l'inerzia equivalente
del motore e del meccanismo1, riferita all'albero motore.
Nel caso in esame, si può pensare che al momento d'inerzia proprio del tamburo si sovrapponga
quello del peso che, per l'ipotesi di anelasticità del cavo, può essere riportato sulla circonferenza del
tamburo stesso (punto P di Fig.1.6.2.1). Il momento d'inerzia del peso è dunque:
J P = M P ⋅ r 2 = 1000 ⋅ 0. 32 = 90 Kgm2
(1.6.2.1)
che si somma a quello del tamburo, formando il momento d'inerzia complessivo
J1c = JP+Jtamb=93 Kgm2
(1.6.2.2)
Se si suppone che il cambio sia privo di perdite, la potenza meccanica viene tutta trasmessa, quindi vale la
relazione τ Nω N = τ1ω1 dove τN e τ1 sono rispettivamente la coppia sviluppata dal motore e la coppia trasmessa
al tamburo dell'argano. Per un carico puramente inerziale, la coppia è legata alla velocità di rotazione dalla
relazione
d ω1
τ1 = J1c
dt
dove con J1c si è indicato il momento d'inerzia complessivo appena calcolato. Detto n = ωN/ω1 il rapporto di
riduzione del cambio, dalle relazioni appena scritte si ottiene:
τN
b g
d ωN n
ωN
= J1c
ω1
dt
⇒
τN =
J1c d ω N
dωN
= J Nc
2
dt
n dt
da cui rimane provato che il momento d'inerzia riportato al motoreErrore. Il segnalibro non è definito. JNc è
pari al momento d'inerzia del carico diviso per il quadrato del rapporto del riduttore.
Il momento d'inerzia complessivo del carico riportato al motore vale
93
J
J Nc = 12c =
= 0. 93 Kgm2
100
n
(1.6.2.3)
Ad esso vanno sommati i momenti d'inerzia propri del motore e del cambio per ottenere il risultato
cercato:
Consideriamo un corpo rigido C formato da N punti materiali, in rotazione con velocità ω. L'energia cinetica
totale è:
1
N
1
E c = ∑ M i v2i
i =1 2
mentre la velocità scalare del punto i-esimo, distante ri dall'asse di rotazione, è vi = ri ω, avendo indicato con ω
la velocità del corpo in rotazione. Sostituendo si ottiene:
N
1
1 N
1
E c = ∑ M i ri2 ω 2 = ( ∑ M i ri2 ) ω 2 = I ω 2
2 i =1
2
i =1 2
La quantità I, caratteristica del corpo, viene definita momento di inerzia del corpo rispetto all'asse di rotazione
considerato.
37
CAPITOLO 1 - P
OTORE A CORRENTE CONTINUA AD ECCITAZIONE INDIPENDENTE
J Nt = J N + J r + J Nc = 1 + 0. 2 + 0. 93 = 2.13 Kgm2
(1.6.2.4)
1.6.3 - Esercizio 3
Un motore a corrente continua ad eccitazione indipendente ha una tensione d'armatura che può
essere variata da 0 a 600V. Alla tensione di armatura nominale la velocità del motore è di 1600 rpm. Si
trascurino tutte le perdite.
•
•
•
Qual'è la corrente di armatura quando la coppia di carico è 420 Nm (con la tensione d'armatura
fissata a 600V) ?
Se si mantiene ancora costante la tensione di armatura e si riduce la corrente di campo fino ad
ottenere una velocità di 4000 rpm, che coppia può esercitare il motore ?
Qual'è la specifica di potenza per l'alimentatore del motore ?
a) Calcolo della corrente di armatura.
Se si trascurano le perdite, la potenza meccanica trasmessa al carico coincide con la potenza
elettrica assorbita dal motore. Si ha dunque:
P
T ⋅ Ω 420 1600
Ia = N =
=
2 π = 117 . 3 A
Ua
Ua
600 60
(1.6.3.1)
b) Calcolo della coppia.
Il motore viene in tal caso fatto funzionare nel tratto a potenza costante, dunque si ha:
P
U I
600 ⋅ 117 . 3
T= N = a a =
60 = 168 Nm
Ω
Ω
4000 ⋅ 2 π
(1.6.3.2)
c) Calcolo della specifica di potenza.
La potenza nominale del motore è PN=70.37kW; l'alimentatore andrà comunque
sovradimensionato, perché in generale la parte di potenza sopporta peggio i transitori termici rispetto a
quella meccanica.
1.6.4 - Esercizio 4
Un motore a corrente continua a magneti permanenti ruota a vuoto alla velocità di 400 rad/s quando
è alimentato a 200V. Sapendo che la resistenza Ra del circuito indotto è di 0.2 Ω tracciare la
caratteristica meccanica e valutare la velocità quando il motore sviluppa una coppia di 20 Nm.
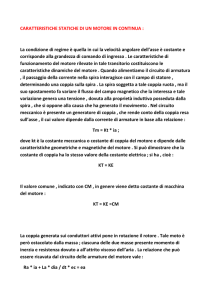
a) Caratteristica meccanica e punto di funzionamento
Si richiama per praticità l'equazione meccanica a regime per un motore in c.c. funzionante a
tensione impressa (1.4.6):
38
CAPITOLO 1 - P
OTORE A CORRENTE CONTINUA AD ECCITAZIONE INDIPENDENTE
U − KeΦΩ
T = Ke Φ a
Ra
Innanzitutto occorre ricavare la costante KeΦ, utilizzando la (1.4.8):
(1.6.4.1)
200 V
K eΦ = U a Ω0 =
= 0. 5 Vs/rad
400 rad / s
(1.6.4.2)
Sostituendo i dati numerici forniti dal testo del problema si ottiene l'equazione della caratteristica
meccanica D1:
T = 500 - 1.25 Ω
(retta D1)
(1.6.4.3)
In Fig.1.3.2 se ne dà una rappresentazione grafica:
T [Nm]
500
400
300
200
100
20 Nm
ω [rad/s]
100
200
300
400
384 rad/s
Fig.1.6.4.1 - Caratteristica meccanica del motore c.c
b) Calcolo della velocità
La velocità corrispondente ad una coppia di 20 Nm si ottiene invertendo la (1.6.4.1):
Ω=
Ua
Ke Φ
−
RaT
bKeΦ g2
= 384 rad/s
(1.6.4.4)
come riportato ancora in Fig.1.6.4.1.
1.6.5 - Esercizio 5
Un motore a corrente continua ad eccitazione indipendente ha i seguenti dati di targa:
•
•
•
PN = 40 KW
UN = 250V
ΩN = 120.42 rad/s (1150 rpm)
Esso viene usato in un azionamento per il controllo di velocità, costituito da un regolatore di tipo
proporzionale, secondo lo schema a blocchi seguente:
39
CAPITOLO 1 - P
OTORE A CORRENTE CONTINUA AD ECCITAZIONE INDIPENDENTE
Fig.1.6.5.1 - Schema a blocchi dell'azionamento di velocità
La corrente di eccitazione è mantenuta costante ad un valore per cui KeΦ=1.95 Vs/rad. La
resistenza di armatura vale Ra=0.089 Ω e il coefficiente di attrito viscoso vale B=0.275 Nms/rad. La
dinamo tachimetrica, usata per trasdurre la velocità del motore, è caratterizzata da una costante
KtΩ=10V/1000 rpm ed il guadagno del regolatore P (che congloba anche il guadagno del convertitore)
vale Kpω=200.
• Determinare il valore del riferimento Ωrif necessario per portare il motore a lavorare alla velocità
nominale a vuoto;
• Mantenendo costante tale riferimento, determinare la velocità alla quale il motore girerà se gli si
applica la coppia nominale
• Se il motore fosse alimentato con tensione di armatura costante Ua=240V (ovvero non ci fosse il
sistema di retroazione) determinare la velocità a vuoto e quella al carico nominale.
a) Determinazione del riferimento
Alla velocità nominale, la tensione di retroazione vale:
Ωt =
10
1150 = 11.50 V
1000
(1.6.5.1)
Se si fa l'ipotesi di trascurare le perdite meccaniche e le perdite nel ferro di rotore, la potenza di
targa, che si suppone essere in genere la potenza meccanica generata, coincide con la potenza utile2;
ricordando di esprimere la velocità nominale in rad/s, la coppia nominale vale allora:
P
40000 60
TN = N =
= 332. 2 Nm
ΩN
1150 2 π
(1.6.5.2)
La coppia nominale è bilanciata da una coppia di carico, formata da una componente di attrito
viscoso e da una componente costante TL3 che vale:
2
Non è sempre chiaro a che potenza si riferisca il dato di targa dei motori. Per chiarezza, si ricorda che la
potenza elettrica generata UaIa, diminuita delle perdite RaIa2 per effetto Joule nell'avvolgimento, è la potenza
elettromeccanica, o potenza meccanica generata Pem=KeΦIaΩ. Se da questa si tolgono le perdite meccaniche
dovute all'attrito dei cuscinetti e all'attrito viscoso per la ventilazione, e le perdite nel ferro di rotore, che possono
essere ancora assimilate a potenza meccanica, si ottiene la potenza utile, o potenza resa PN.
3
Si può pensare ad un montacarichi, che ha sempre una coppia d'attrito viscoso, a cui si può sommare un peso
(coppia costante al variare della velocità).
40
CAPITOLO 1 - P
OTORE A CORRENTE CONTINUA AD ECCITAZIONE INDIPENDENTE
TL = TN - B ΩN = 332.2 - 0.275 120.4 = 299 Nm
(1.6.5.3)
Dato che si considera sempre una situazione a regime, la funzione di trasferimento tra velocità
d'uscita e tensione di armatura risulta semplificata, come è evidenziato anche dai blocchi di
Fig.1.6.5.1. Si trova facilmente che vale la relazione:
b
b gb
g
1. 95 0. 089 ⋅ 0. 275
Ω
Ke Φ R a B
= 0.5095 rad / Vs
=
=
2
Ua 1 + KeΦ R a B 1 + 1. 95 2 0. 089 ⋅ 0. 275
b g
g
(1.6.5.4)
Quindi alla velocità nominale ΩN=120.4 rad/s e con TL = 0 la tensione di armatura vale:
Ua =
120. 4
= 236. 3 V
0.5095
(1.6.5.5)
Il riferimento di velocità (che è una tensione) risulta allora:
Ω rif = Ω t +
Ua
236. 3
= 11. 50 +
= 12 . 68 V
K pω
200
(1.6.5.6)
b) Si può ora ridisegnare lo schema a blocchi di Fig.1.6.5.1 per calcolare la risposta del sistema (a
regime, ma si potrebbe studiare anche il caso più generale) ad un gradino di coppia. In questo caso si
annulla Ωrif (mentre prima, per il calcolo della (1.6.5.3), si ammetteva di annullare TL) perché, data la
linearità del sistema, si può applicare la sovrapposizione degli effetti.
Fig.1.6.5.2 - Schema a blocchi per la risposta alla coppia di carico
Tale schema può essere ridisegnato come in Fig.1.6.5.3, dopo aver risolto l'anello nella catena di
retroazione:
Fig.1.6.5.3 - Schema a blocchi semplificato
Per esso la funzione di trasferimento è la seguente:
41
CAPITOLO 1 - P
OTORE A CORRENTE CONTINUA AD ECCITAZIONE INDIPENDENTE
Ω
1B
Ra
=
=
− TL 1 + KeΦ K pω K tΩ + KeΦ 1 BRa
R a B + KeΦ K pω K tΩ + KeΦ
ib g
d
d
(1.6.5.7)
i
La (1.6.5.7) indica che, com'è intuitivo, ad un riferimento di coppia di carico positivo corrisponde a
regime un valore di velocità negativo. Sostituendo i valori di cui si dispone si ottiene:
Ω=
−299 ⋅ 0. 089
j = - 0.648 rad / s = - 6.188 rpm
e
(1.6.5.8)
0. 089 ⋅ 0. 275 + 1. 95 200 ⋅ 95.49 ⋅ 10-3 + 1. 95
Applicando il principio di sovrapposizione degli effetti si ha allora:
Ω = 1150 − 6.188 ≈ 1144 rpm
(1.6.5.9)
c) Le equazioni del motore in corrente continua a regime sono le seguenti:
Ua = R aIa + KeΦΩ
T = BΩ + TL = KeΦIa
Da esse si ottiene con qualche passaggio:
Ω=
b g
b g
Ra BΩ + TL
U K Φ − R a BΩ − R aTL
Ua
RI
U
R aT
Ua
= a e
− aa = a −
=
−
2
2
2
K e Φ Ke Φ Ke Φ Ke Φ
Ke Φ
Ke Φ
KeΦ
b g
F R B I U K Φ−R T
=
G
J
G
J
b
g
K
Φ
H
K bK Φg
Ω 1+
a
a
e
a L
2
2
e
e
→
Ω=
Ua KeΦ − RaTL
bK Φg+ R B
2
e
b g
(1.6.5.10)
a
Sostituendo (con TL= 0) i valori conosciuti si può calcolare la velocità a vuoto nel caso di tensione
di armatura costante:
ΩT
L =0
=
1. 95 ⋅ 250
b1. 95g+ 0. 089 ⋅ 0. 275
2
= 127 . 4 rad / s = 1216 rpm
(1.6.5.11)4
A carico nominale (TL= 299 Nm) si ha invece, sempre dalla (1.6.5.10):
Ω T =T =
L N
1. 95 ⋅ 250 − 299 ⋅ 0. 089
b1. 95g2 + 0. 089 ⋅ 0. 275
= 120. 4 rad / s = 1150 rpm
(1.6.5.12)
Si può osservare che con la retroazione la precisione del controllo di velocità nel passaggio da
vuoto a carico passa da (1216 - 1150) = 66 rpm a (1150-1144) = 6 rpm, dunque migliora di un fattore
di circa 10.
1.6.6 - Esercizio 6
4
E' ovvio che alimentando il motore alla tensione nominale si ottenga, con TL=0, una velocità più alta della
nominale, perchè viene a mancare la c.d.t. sulla resistenza di fase dovuta alla corrente nominale.
42
CAPITOLO 1 - P
OTORE A CORRENTE CONTINUA AD ECCITAZIONE INDIPENDENTE
Si consideri un motore in c.c. ad eccitazione indipendente, con costante di coppia e f.e.m
KeΦ = 0.5 Vs/rad, resistenza di armatura Ra= 1.25 Ω e induttanza d'armatura La=2 mH; il momento di
inerzia totale (del motore e del carico, riportato al motore) è J=0.03 Kgm2 ed il coefficiente d'attrito
viscoso totale è B=0.2 Nms/rad. Si suppone che la trasmissione del moto sia anelastica, e si alimenta il
motore a tensione impressa con tensione d'armatura Ua1= 50V. Una volta raggiunta la condizione di
funzionamento a regime, si effettua una variazione a gradino della tensione d'armatura, portandola al
valore Ua2= 100V.
•
Si disegnino le caratteristiche meccaniche nei due casi e si calcolino le velocità e le coppie di
funzionamento nei due punti di lavoro (che saranno indicati con P1 e P2).
•
Si definiscano gli andamenti della velocità e della coppia in funzione del tempo nel primo mezzo
secondo di transizione da P1 a P2.
a) Caratteristiche meccaniche e punti di funzionamento a regime
Si richiama per praticità l'equazione meccanica a regime per un motore in c.c. funzionante a
tensione impressa (1.4.6):
U − KeΦΩ
T = Ke Φ a
Ra
(1.6.6.1)
Sostituendo i dati numerici forniti dal testo del problema si ottengono le equazioni di due rette, D1
e D2:
T = 20 - 0.2 Ω
T = 40 - 0.2 Ω
(retta D1)
(retta D2)
(1.6.6.2)
(1.6.6.3)
La retta relativa al carico meccanico è invece data da:
T = B Ω = 0.2 Ω
(1.6.6.4)
Dalle intersezioni della retta di carico con le (1.6.6.2) e (1.6.6.3) si ottengono direttamente le
coordinate dei punti di lavoro, P1 = (50,10) e P2 = (100,20); la situazione è riportata in Fig.1.6.6.1.
Fig.1.6.6.1 - Caratteristiche statiche del motore in c.c.
b) Calcolo del comportamento transitorio
43
CAPITOLO 1 - P
OTORE A CORRENTE CONTINUA AD ECCITAZIONE INDIPENDENTE
La costante di tempo elettrica vale (cfr.1.5.5) τa=La/Ra=1.6 ms, mentre la costante di tempo
meccanica vale τm = J/B = 150 ms. Si può pertanto ritenere di essere nelle ipotesi delineate nel par.I.8,
per cui si può pensare che a seguito della variazione di tensione la caratteristica meccanica diventi
istantaneamente quella rappresentata dalla curva D2; il nuovo punto di funzionamento diventa
(Ω,T)=(50,30). Dunque al carico inerziale è applicato un gradino di coppia di 20 Nm (Fig.1.6.6.1); tale
gradino provocherà un aumento della velocità e si ridurrà di ampiezza nel tempo, sia perché
diminuisce la coppia prodotta dal motore sia perchè al crescere della velocità aumenta anche la coppia
di carico. La Fig.1.6.6.2 rappresenta tramite uno schema a blocchi l'azionamento, in esame:
Sistema meccanico
Sistema elettrico
1
coppia
1
+
Sum1
tensione
1
Ra
1/(Ra)
KeF
Ke Φ
1
Jt.s+Bt
1/(B+sJ)
2
velocita
KeF
Ke Φ
Fig.1.6.6.2 - Schema a blocchi Simulink® per lo studio del transitorio
Si noti che l'ipotesi di considerare distinte le dinamiche del sistema elettrico e meccanico che
coesistono nel motore equivale ad omettere l'induttanza di armatura; una variazione a gradino della
tensione d'armatura diventa una variazione a gradino della coppia; la velocità meccanica non influenza
il transitorio elettrico che porta alla produzione di tale variazione di coppia.
La funzione di trasferimento tra tensione d'armatura ua e velocità ω si ottiene dalla (1.5.3) ponendo
La=0, e particolarizzandola con i dati numerici forniti dal problema:
Ke Φ
1
1
2
Ke Φ
R a B + Ke Φ
Ω s
Ra
B + sJ
=
=
1
1
2
Ua s
JR a
1+
Ke Φ
1+ s
Ra
B + sJ
2
R a B + Ke Φ
bg
bg
b g
F
H b gIK = 1
F
I 1 + 0. 075s
G
G
J
b gJ
H
K
(1.6.6.5)
Considerando di applicare un gradino di tensione di 50 V ed antitrasformando si ottiene infine:
bg e
j
ω t = 50 1 − e− t / 0.075 rad/s
La velocità ha dunque un andamento esponenziale con costante di tempo pari a 75 ms; in 0.5s si
può ritenere che essa raggiunga la nuova situazione di regime, in P2.
La funzione di trasferimento che lega tensione d'armatura e coppia si ottiene osservando la
Fig.1.6.6.2:
44
CAPITOLO 1 - P
OTORE A CORRENTE CONTINUA AD ECCITAZIONE INDIPENDENTE
bg= Ωbg
0. 2 b
1 + 0.15 sg
s
b
=
B + sJ g
1 + 0. 075 s
Ua bg
s
Ua bg
s
T s
(1.6.6.6)
Anche in questo caso, considerando di applicare un gradino di tensione (50/s) ed antitrasformando
si ottiene:
bg e
j
τ t = 10 1 − e− t / 0.075 + 20 e− t / 0.075 = 10 + 10 e− t / 0.075 Nm
(1.6.6.7)
La coppia prodotta dal motore, partendo come già accennato da un incremento di 20 Nm (istante
iniziale) giunge a regime ad un incremento, sempre rispetto all'istante iniziale, di 10 Nm, necessario
per vincere l'aumentato attrito viscoso.
Ci si può poi chiedere quanto pesi l'approssimazione fatta per lo studio dell'azionamento; la Fig. 1.6.6.3 riporta
gli andamenti di velocità e coppia nel caso considerato, confrontandolo con una simulazione effettuata senza
trascurare la induttanza di armatura.
DINAMICA ELETTRICA E MECCANICA
Una terza simulazione mostra invece gli
andamenti delle grandezze meccaniche per
una induttanza di armatura 10 volte più
40
grande, e quindi costanti di tempo elettrica
20
e meccanica che differiscono di circa un
La=20mH
fattore 10. Con l'induttanza proposta dal
0
problema, non si vedono differenze
0
0.1
0.2
0.3
0.4
0.5
significative rispetto al caso approssimato.
t [s]
Diverso è il caso con induttanza
20
La=0
[Nm]
sensibilmente maggiore; la creazione di
15
coppia in seguito all'applicazione di un
La=2mH
10
gradino di tensione è un esponenziale
La=20mH
abbastanza lento, come mostra la
5
Fig.1.6.6.3 in basso. Durante tale
0
transitorio elettrico la velocità riesce a
0
0.1
0.2
0.3
0.4
0.5
variare e lo influenza. Viene a cadere la
t [s]
separazione
tra le dinamiche sopra
Fig.1.6.6.3 - Influenza della induttanza di armatura nel transitorio
ipotizzata, e la risposta di velocità ha
l'andamento di un sistema del secondo ordine, come descritto dalla (1.5.3).
60
[rad/s]
La=0
La=2mH
1.6.7 - Esercizio 7
Ricavare un circuito elettrico equivalente per il motore in corrente continua, comprensivo del
carico in condizioni dinamiche. Si particolarizzi poi tale circuito con i valori di seguito riportati,
relativi ad un motore in c.c. Clifton DH2250B1 , di piccola potenza:
•
•
•
•
Resistenza di armatura Ra= 1 Ω
Induttanza di armatura La= 46 mH
Costante di fcem e di coppia KeΦ = 0.55 Vs/rad
Momento di inerzia del motore e del carico J = 0.93 Kgm2
45
CAPITOLO 1 - P
OTORE A CORRENTE CONTINUA AD ECCITAZIONE INDIPENDENTE
• Coefficiente d'attrito B = 36*10-6 Nms
• Coppia d'attrito costante TL=11.2*10-3 Nm
Le equazioni che determinano la dinamica di un motore in corrente continua sono state ricavate nel
paragrafo 1.1, e vengono di seguito riportate per comodità:
di
ua = R aia + La a + ea
(1.6.7.1)
dt
dω
KeΦia = Bω + J
+ τ L( ω)
(1.6.7.2)
dt
La prima equazione è relativa al circuito di armatura, che rappresenta dunque già una parte del
circuito elettrico equivalente cercato, come mostra la Fig.1.6.7.1:
ia
Ra
La
+
+
KeΦ ω
ua
Fig.1.6.7.1 - Circuito elettrico d'armatura
E' di interesse trovare un equivalente formale di tipo "elettrico" anche per l'equazione meccanica
(1.6.7.2); da questa, osservando che la coppia di carico è costante, ovvero τ(ω)=TL, si ha subito:
J
dω
dt
= KeΦia − Bω − TL
(1.6.7.3)
da cui si ottiene, esplicitando la generica dipendenza della velocità dal tempo:
ω( t ) =
1
J
t
∫ ( KeΦia − Bω − TL ) dt
(1.6.7.4)
0
Si può ora sostituire tale espressione della velocità nella formula della forza controelettromotrice
ea = KeΦω, che è rappresentata dal generatore dipendente in Fig.1.6.7.1. Si ottiene subito
2
Bω
T I
bg KJeΦ 0t bKeΦia − Bω − TL gdt = bKeJΦ g 0t F
− L Jdt
ia −
G
H K eΦ K eΦ K
ea = K e Φ ω t =
z
z
(1.6.7.5)
La funzione integranda è dimensionalmente una corrente; si riconosce facilmente che si tratta
dell'espressione della corrente che scorre in un condensatore
C=
J
(1.6.7.6)
( KeΦ) 2
Detta ic tale corrente si ha:
46
CAPITOLO 1 - P
OTORE A CORRENTE CONTINUA AD ECCITAZIONE INDIPENDENTE
Bω
−
Ke Φ
Bω
i a = ic +
+
Ke Φ
ic = ia −
τL
Ke Φ
τL
Ke Φ
(1.6.7.7)
(1.6.7.8)
Ciascun termine a secondo membro della (1.6.7.8) rappresenta un ramo in parallelo, tutti aventi ai
loro capi la tensione KeΦω. E' possibile allora intuire che elementi circuitali possano essere inseriti nel
circuito equivalente in costruzione. Per il secondo addendo si ha, ad esempio:
2
b
Ke Φ g
FBω I = FBω I = B = R
G
HKeΦ JK G
HKeΦ JK
ea
Ke Φ ω
(1.6.7.9)
e l'ultima uguaglianza ad un elemento resistivo R è giustificata dal fatto che la corrente attraverso quel
ramo è proporzionale alla tensione applicata con costante di proporzionalità (KeΦ)2/B. Analogamente,
si riconosce che l'ultimo addendo della (1.6.7.8) è una corrente costante indipendente dalla tensione ai
suoi capi, ed è pertanto modellizzabile come un generatore di corrente costante:
I=
TL
(1.6.7.10)
KeΦ
Il circuito equivalente cercato è dunque il seguente:
ia
+
ua
Ra
La
ic
J
( K e Φ) 2
B
K eΦ
( K e Φ) 2
B
TL
K eΦ
Fig.1.6.7.2 - Circuito elettrico equivalente in regime dinamico
Il circuito equivalente rispecchia quello che viene visto da un convertitore che alimenta il motore in
corrente continua, compreso il carico meccanico. Dato che non è sempre facile avere a disposizione un
carico meccanico a parametri variabili per effettuare misure e tarature, il circuito si propone come una
valida alternativa "da laboratorio".
Si possono ora particolarizzare le espressioni (1.6.7.6), (1.6.7.9) e (1.6.7.10) con i valori numerici
forniti all'inizio dell'esercizio; si trova
R = 8400 Ω
C = 30000 μF
I = 20 mA
Una difficoltà intrinseca di questo modo di procedere è legata, come appare evidente, alla possibile
difficoltà di reperire componenti elettronici dei valori necessari.
47
CAPITOLO 1 - P
OTORE A CORRENTE CONTINUA AD ECCITAZIONE INDIPENDENTE
Si può ovviare all'inconveniente introducendo opportuni fattori di scala. Un esempio, che qui sarà solo
accennato, consiste nel porre KeΦ' = 10 KeΦ ed imporre nella equazione (1.6.7.1) di mantenere invariata la
tensione d'armatura ua. Da queste due scelte, del tutto arbitrarie, discendono una serie di fattori di scala per tutte
le grandezze presenti nelle (1.6.7.1) e (1.6.7.2), che portano infine ad avere valori più ragionevoli per il circuito
equivalente sopra ricavato.
48