APPUNTI
di
IDRODINAMICA
M.Calvetti e E.Iacopini
per Il Corso di FLUIDI e TERMODINAMICA
Dipartimento di Fisica, Università di Firenze
May 8, 2004
Abstract
1
0.1
Programma del corso
CORSO DI LAUREA IN FISICA - UNIVERSITA’ DI FIRENZE
Anno accademico 2003-2004
Programma del corso di DINAMICA dei FLUIDI e TERMODINAMICA.
60 Ore, con esercitazioni.
Prof. Mario Calvetti
Dinamica dei Fluidi
Principio di Pascal. Legge di Stevino. Legge di Pascal. Legge di
Archimede. Descrizione del moto dei fluidi. Operatori gradiente, divergenza e rotazione. Equazione di continuità.Equazioni del moto di Eulero.
Teorema di Leonardo. Teorema di Bernoulli. Moto di liquidi reali. Viscosità e tensione superficiale. Legge di Poiseulle
Termodinamica
Definizione di gas perfetto. Calcolo della pressione sulle pareti di una
scatola con il modello microscopico. La costante di Boltzman e l’ energia
cinetica media delle molecole di un gas. Derivazione dell’equazione di stato
di un gas perfetto (legge di Boyle). Principio zero della Termodinamica ed
equilibrio termodinamico. Grandezze termodinamiche. Variabili di stato.
Definizione di Energia Interna, calore assorbito e lavoro compiuto dal sistema. Equivalente meccanico del calore. La caloria. Primo Principio della
Termodinamica. Le scale termometriche Celsius e Fahrenheit. Il piano di
Clapeyron e le trasformazioni termodinamiche. Trasformazioni di un gas
perfetto. Trasformazioni Isoterme, Isobare, Isocore, Adiabatiche per un
gas perfetto. Calore specifico a pressione e a volume costante per un gas
perfetto. Il termometro a gas e la temperatura assoluta. Trasformazioni reversibili ed irreversibili. Il secondo Principio della Termodinamica. Postulato di Clausius , postulato di Kelvin e loro equivalenza. Il ciclo di Carnot.
Rendimento delle macchine termiche. Rendimento del ciclo di Carnot e
dei cicli irreversibili. Definizione di Entropia. Entropia come variabile di
stato. Il secondo principio della termodinamica formulato tramite le proprietà dell’entropia. Relazione tra l’Entropia e la probabilità di Stati in
equilibrio. Calcolo della variazione di Entropia nell’espansione di una gas
perfetto con metodi termodinamici (espansione Isoterma) e metodi statistici. Funzioni termodinamiche. Energia interna, Entalpia, Energia libera
di Helmoltz e di Gibbs. Sistemi statistici in equilibrio. Discretizzazione
dello spazio delle fasi in posizione ed impulso. Stati di energia possibili
e calcolo della popolazione di equilibrio con la distribuzione multinomiale. Funzione di ripartizione. Definizione di Temperatura assoluta in gradi
Kelvin. Legge di distribuzione di Maxwell Boltzman per un sistema in
equilibrio statistico. Relazione tra temperatura assoluta e l’energia cinetica media. Funzione di distribuzione delle velocité0 di Maxwell per un gas
perfetto.
2
Testi consigliati per il programma di Termodinamica classica:
• C.Mencuccini V.Silvestrini: Meccanica e Termodinamica-LIGUORI
EDITORE
• S.Rosati : Meccanica e Termodinamica• P.Mazzoldi M.Nigro C.Voci : Elementi di Fisica-Meccanica TermodinamicaEdiSES
• Per la dinamica dei fluidi e la meccanica statistica sono sufficienti
queste dispense
• E.Fermi: Termodinamica-Boringhieri
• F.Reif: La fisica di Berkeley-Fisica Statistica 5-ZANICHELLI BOLOGNA
• M.Alonso E.J.Finn: Fundamental University Physics-Quantum and
statistical physics III.ADDISON WESLEY
L’esame consiste in una prova orale durante la quale si discutono gli
argomenti del programma e si svolgono alcuni esercizi numerici.
3
Contents
0.1
Programma del corso . . . . . . . . . . . . . . . . . . . . . . . . .
1 Idrostatica
1.1 introduzione . . . . . . . . . . . . .
1.2 La pressione nei gas . . . . . . . . .
1.3 La Legge di Boyle dei gas perfetti .
1.4 La pressione nei liquidi . . . . . . .
1.5 Legge di Stevino . . . . . . . . . .
1.6 Il barometro di Torricelli . . . . . .
1.7 Paradossi idrostatici . . . . . . . .
1.8 I vasi comunicanti . . . . . . . . . .
1.9 Il Principio di Archimede . . . . . .
1.10 Elementi utili di algebra vettoriale .
1.11 Operatori di campo . . . . . . . . .
1.12 Il Teorema di GAUSS . . . . . . . .
1.13 Il Teorema di STOKES . . . . . . .
1.14 Esercizi di calcolo vettoriale . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
2 Idrodinamica
2.1 Introduzione . . . . . . . . . . . . . . . . . . . . . . . . . .
2.2 L’equazione di continuità . . . . . . . . . . . . . . . . . . .
2.3 Equazioni del moto e la legge di Stevino . . . . . . . . . .
2.4 Le equazioni del moto di Eulero . . . . . . . . . . . . . . .
2.5 Il teorema di Leonardo . . . . . . . . . . . . . . . . . . . .
2.6 Il teorema di Bernoulli . . . . . . . . . . . . . . . . . . . .
2.7 Il teorema di Torricelli . . . . . . . . . . . . . . . . . . . .
2.8 Il Tubo di Venturi . . . . . . . . . . . . . . . . . . . . . . .
2.9 Il moto di liquidi reali . . . . . . . . . . . . . . . . . . . .
2.10 Moto di un liquido viscoso in una condotta . . . . . . . . .
2.11 Equilibrio di un liquido in rotazione uniforme . . . . . . .
2.12 Effetti della rotazione terrestre sulla superficie degli oceani
2.13 Legge di Poiseuille . . . . . . . . . . . . . . . . . . . . . .
4
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
2
.
.
.
.
.
.
.
.
.
.
.
.
.
.
5
5
6
8
9
15
18
20
24
24
28
31
34
36
39
.
.
.
.
.
.
.
.
.
.
.
.
.
42
42
42
45
48
50
52
54
56
57
60
61
62
67
1
Idrostatica
1.1
introduzione
Iniziamo definendo che cosa si intende per gas perfetto e liquido perfetto. Come
sappiamo dalla Fisica elementare, le differenze essenziali che ci sono fra corpi
solidi, liquidi e gassosi sono che
• i corpi solidi possiedono volume e forma propria;
• i corpi liquidi hanno volume proprio (i.e. sono incomprimibili) ma possono
variare di forma;
• i corpi gassosi non hanno volume e forma propri: occupano qualunque
volume posto a loro disposizione, di qualunque forma esso sia.
Pur esistendo corpi che non appartengono a nessuna delle categorie sopra elencate (colloidi), e pur esistendo corpi di difficile collocazione (vetri, lave, ecc, la
classificazione data è molto generale.
Noi ci occuperemo delle proprietà dei gas e dei liquidi perfetti (come sappiamo
le cose perfette non esistono . . . ).
Il gas perfetto.
Si definisce gas perfetto un gas costituito da molecole che interagiscono per
urto e non attraverso forze di potenziale a lunga distanza. Negli urti le molecole si
scambiano energia ed il gas raggiunge l’equilibrio termodinamico nel quale tutte
le molecole hanno la stessa funzione di distribuzione dell’energia. Una buona
approssimazione dei gas perfetti sono i gas rarefatti.
Il liquido perfetto.
Si tratta di un liquido la cui densità non può essere modificata in alcun modo
(cioè incomprimibile) tale da non possedere attrito interno, ovvero tale che le
forze interne non si oppongano allo scorrimento di uno strato di liquido su un
altro. Come conseguenza di questa seconda proprietà, il lavoro compiuto contro le
forze interne del liquido, pur cambiandone la forma, è sempre nullo ! L’acqua, la
benzina, l’alcool possono essere visti come una buona approssimazione di liquido
perfetto, mentre l’olio, il miele, per esempio, sono liquidi molto viscosi, cioè con
forte attrito interno e dunque lontani dall’approssimazione di liquido perfetto.
5
1.2
La pressione nei gas
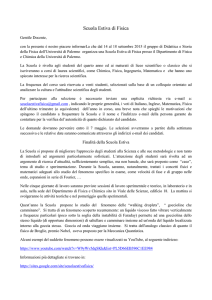
La pressione che un gas esercita contro il recipiente che lo contiene è dovuta ai
numerosi urti che le molecole del gas fanno contro le sue pareti.
La pressione P , definita come la forza per unità di superficie, si calcola
nell’ipotesi di urti elastici (vedi Fig.1).
Figure 1: La pressione del gas è provocata dall’urto delle molecole contro le pareti
Sia ρ la densità numerica, cioè il numero di molecole per unità di volume, m
la massa delle singole molecole, supposte in questo esempio tutte uguali, vx la
componente della velocità molecolare perpendicolare alla parete considerata.
Nel caso di urto elastico, la componente dell’impulso parallela alla parete rimane inalterata mentre, a causa della forza che la parete esercita sulla molecola, la
componente perpendicolare cambia di segno. Per il principio di azione e reazione
la stessa forza viene esercitata dalla molecola sulla parete.
La durata dell’urto della singola molecola, contro la parete, è molto piccolo
(provate a calcolarlo per esercizio alla fine del capitolo), ma dato il grande numero
di urti per unità di tempo, e di superficie, la forza risultante è praticamente
continua.
6
Consideriamo un elemento di superficie di parete dS per calcolare la forza dF
esercitata da questo elemento di superficie sulle molecole del gas.
I parametri importanti sono:
• la densità numerica del gas ρ, cioè il numero di atomi per unità di volume
• il numero di urti nel tempo dt sulla superficie dS; dato da
1
ρ dSvx dt
2
dove il fattore 21 tiene conto del fatto che solo la metà delle molecole si
muove verso la parete, e quindi la urta se abbastanza vicine, mentre l’altra
metà si allontana.
• il modulo della variazione d’impulso (o quantità di moto) in ogni urto
∆p = 2mvx
La variazione totale della quantità di moto, nel tempo dt, si ottiene moltiplicando la variazione d’impulso di un singolo urto per il numero di urti nel tempo
considerato; questa deve essere uguale, per la legge di Newton, al prodotto della
forza media dF esercitata dalla parete sul gas per il tempo dt:
dF dt = ρ dS dt mvx 2
La pressione P , la forza esercitata sull’unità di superficie, è quindi:
P =
dF
= ρmvx 2
dS
Ora, come sappiamo,l’energia cinetica di una molecola è data da
1 2 1
m~v = m(vx 2 + vy 2 + vz 2 )
2
2
e cambia continuamente a causa degli urti, tuttavia tutte le molecole hanno la
stessa energia cinetica media < Ecin > perché il gas è in equilibrio termodinamico:
1
< Ecin >= m(< vx 2 > + < vy 2 > + < vz 2 >)
2
Se tutte le direzioni della velocità sono egualmente probabili, che è vero
all’equilibrio, allora si ha:
< vx 2 >=< vy 2 >=< vz 2 >
< Ecin >=
7
3
mvx 2
2
2
P = ρ < Ecin >
3
Come si vede la pressione sulla superficie è proporzionale alla densità numerica
del gas vicino alla parete ed all’energia cinetica media. Questa è la legge dei gas
perfetti in forma microscopica (locale).
Si noti che, a causa della conservazione della componente dell’impulso parallela alla parete, la forza di pressione risulta perpendicolare alla parete stessa.
1.3
La Legge di Boyle dei gas perfetti
Consideriamo ora un gas di Ntot molecole (Ntot è molto grande, come vedremo)
contenuto in un recipiente chiuso di volume V ed all’equilibrio termodinamico,
per cui la densità numerica del gas, la pressione e l’energia cinetica media sono
le stesse in ogni punto del volume considerato.
In questo caso:
2 Ntot
P =
< Ecin >
3 V
2
P V = Ntot < Ecin >
3
Si definisce una mole di gas una quantità in grammi pari al peso molecolare.
Come osservato da Boyle, contemporaneo di Galileo, per i gas in condizioni di
equilibrio ed a temperatura data, il prodotto pV è costante.
Più precisamente la legge dei gas di Boyle, osservata sperimentalmente, dice
che per un gas perfetto all’equilibrio vale la relazione:
P V = nRT
dove
• n numero di moli.
Una mole contiene un numero di molecole pari al numero di Avogadro
NA = 6.022 × 1023 mol−1 .
• R costante universale dei gas = 8.3JK −1 mol−1
• T temperatura in gradi Kelvin (TKelvin = tCentigradi + 273.15)
Si ha quindi che:
PV =
dalla quale
< Ecin > =
2
Ntot < Ecin > = n R T
3
3 n
3 n
3
RT =
RT = kT
2 Ntot
2 nNA
2
dove k = 1.38 × 10−23 JK −1 è la costante di Boltzmann.
8
La costante dei gas, il numero di Avogadro e la costante di Boltzmann sono
legate dalla relazione R = kNA
Abbiamo quindi visto come le proprietà macroscopiche del gas, i suoi parametri
di stato come la temperatura, il volume e la pressione, siano legate alle loro proprietà microscopiche, come la densità numerica e l’energia cinetica media delle
molecole. La connessione tra le proprietà macroscopiche e quelle microscopiche,
descritta dalla meccanica statistica, è uno dei grandi successi della fisica dell’800.
Approfondiremo in seguito alcuni aspetti della meccanica statistica legati ai principi fondamentali della termodinamica.
1.4
La pressione nei liquidi
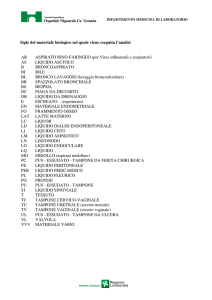
Un liquido esercita su tutte le superfici con le quali è a contatto delle forze, dette
forze di pressione. Consideriamo, per esempio, cosa accade a dell’acqua in un
recipiente (vedi Fig.2)
Figure 2: Liquidi e recipienti
L’acqua esercita delle forze sulle pareti le quali reagiscono con forze uguali
ed opposte, realizzando cosı̀ una situazione di equilibrio. Che sia proprio cosı̀
lo capiamo immediatamente praticando un foro nella parete del recipiente. In
quella zona, la parete non può opporre alcuna forza contro l’acqua per cui essa
non è più in equilibrio e fuoriesce dal recipiente!
In assenza di attrito interno (liquido perfetto), ed in uno stato di quiete, la
forza dF esercitata dal liquido su una superficie infinitesima dS ha una intensità
proporzionale a dS , ed è diretta secondo la normale a dS.
9
La costante di proporzionalità P fra l’ intensità della forza e la superficie su
cui agisce viene chiamata pressione
~
dF~ = P dS
~ , non da
e dipende solamente dal punto dove si trova l’ elemento di superficie dS
come essa è orientata.
Questo fatto va sotto il nome di PRINCIPIO DI PASCAL (Blaise Pascal,
1623 − 1662). (vedi Fig.3)
Figure 3: Principio di Pascal. In un liquido perfetto la forza di pressione è sempre
perpendicolare alla superficie considerata.
La validità del principio di Pascal risiede nel fatto che in liquido perfetto gli
strati di liquido si muovono tra di loro senza attrito.
In questo caso il liquido può solo esercitare una forza perpendicolare alla
superfice perchè parallelamente non c’è attrito.
Consideriamo il prisma retto (vedi Fig.4) di dimensioni infinitesime dx, dy e
dz, posto in un punto interno al volume occupato dal fluido in quiete.
10
Se il liquido contenuto nel prisma è in equilibrio, la somma vettoriale delle
forze esterne che agiscono su di esso deve essere nulla, cioè la somma algebrica di
ciascuna delle tre componenti delle forze che agiscono sulle superfici deve essere
nulla.
Figure 4: La pressione è la stessa in ogni direzione. La risultante delle forze
esterne è nulla.
Calcoliamo per esempio la risultante lungo l’ asse y.
Poichè le forze sono ortogonali alle superfici, lungo questa direzione contribuiscono solo quelle che agiscono rispettivamente contro la faccia verticale, di lati dx
e dz e contro la faccia obliqua. Indichiamo rispettivamente con Py e con P le
pressioni che agiscono contro le due facce.
Per soddisfare la condizione di equilibrio deve essere
q
Py dxdz = P dx (dz)2 + (dy)2 sin θ
q
Si riconosce immediatamente che (dz)2 + (dy)2 sin θ = dz e quindi Py = P
: le pressioni sulle due superfici considerate sono uguali.
Quanto detto vale qualunque sia l’orientamento del prisma retto, per cui si può
dire che la pressione in un punto non dipende dall’ orientamento della superficie.
11
Nel sistema di unità di misura internazionale (SI), dove la forza si misura in
newton (N) e la superficie in metri quadri, la pressione si misura in mN2 = pascal.
Esistono altre unità di misura storiche ancora diffuse come, per esempio:
• 1 baria = 1 dine
unità di pressione nel sistema cgs = 0.1 pascal
cm2
• 1 bar = 106 barie
Le previsioni del tempo riportano pressioni atmosferiche dell’ordine d 1000
mbar ovvero
1bar = 106 barie = 105 pascal (1000hectopascal) = 105
N
m2
circa
Kgp
Kgp
=1 2
2
m
cm
Dimostriamo adesso che in un liquido in quiete in assenza di forze esterne, la
pressione é ovunque la stessa.
104
Figure 5: In un liquido, in assenza di forze esterne come per esempio la gravità,
e in condizioni di equilibrio, la pressione P è la stessa in ogni posizione
Consideriamo in un liquido (vedi Fig.5) due punti generici P1 e P2 . Costruiamo il cilindro avente come generatrice la congiungente i due punti e come basi
due superfici circolari infinitesime dS1 e dS2 aventi lo stesso raggio dr, centrate
rispettivamente intorno a P1 e P2 , ed ortogonali all’asse del cilindro.
12
Applichiamo le solite considerazioni di statica al liquido contenuto nel cilindro:
poiché esso è in quiete, la risultante delle forze esterne deve essere nulla.
Occupiamoci della componente della risultante delle forze lungo la direzione
definita dalla generatrice del cilindro (orientata, per esempio, da P1 a P2 ).
Chiaramente la pressione sulla parete laterale del cilindro non ha componente
lungo questa direzione, solo la pressione esercitata sulle due superfici di base può
contribuire a questa risultante, che vale
R = P1 dS1 − P2 dS2
Poiché R deve essere nulla, e le due superfici hanno la stessa area, la pressione
nei due punti è la stessa.
Il funzionamento del TORCHIO IDRAULICO è basato su questo fatto. Esso
consente, per esempio, di sollevare oggetti molto pesanti, come per esempio un
automobile, ovvero di generare forze intense a partire da forze molto meno intense.
(vedi Fig.6)
Figure 6: Il torchio idraulico. Essendo la pressione la stessa in ogni punto
del liquido, aumentando la superficie sulla quale il fluido preme si aumenta la
forza totale esercitata dal liquido. Naturalmente lo spostamento della superficie
diminuisce in modo che l’energia totale sia conservata.
Dato che la pressione nel liquido è la stessa, ( a parte effetti dovuti al campo
gravitazionale) usando la forza f sulla superficie s possiamo produrre sulla superficie S (con S >> s) una forza
F = PS = f
13
S
s
che può essere anche molto maggiore di f pur di fare il rapporto delle superfici
tale che Ss >> 1.
E’ l’analogo della leva. Come nel caso di quest’ultima, durante il funzionamento del torchio, se la forza f sposta il suo punto di applicazione di una quantita
dx, allora, dato che il liquido è incompressibile e quindi il suo volume non può
cambiare, la forza F sposta il suo punto di applicazione di dx Ss .
Il lavoro fatto dalla forza f e quello fatto dalla forza F risultano cosı̀ uguali
(principio dei lavori virtuali), l’energia meccanica si conserva.
Si può infine, con un marchingegno (compressore) per certi versi simile al
torchio, trasformare una pressione p in una pressione P ≫ p .
La macchina in questione è rappresentata nella Fig.7. Potete verificare che,
anche in una macchina cosı̀ fatta, l’energia meccanica si conserva.
Figure 7: Il compressore.
14
1.5
Legge di Stevino
La legge di Stevino dice che, a causa della presenza della forza di gravità, la
pressione in un liquido aumenta con la profondità perché gli strati inferiori, del
liquido, devono sostenere quelli superiori.
Consideramo infatti il parallelepipedo di liquido rappresentato in Fig.8.
Figure 8: Legge di Stevino. La pressione aumenta con la profondità e sostiene il
peso del liquido sovrastante in quiete.
Se la porzione di liquido è in equilibrio, la risultante delle forze agenti su di
esso deve essere nulla.
La componente verticale della forza agente sulla superficie orizzontale più
bassa deve essere uguale, all’equilibrio, alla forza di pressione agente sulla faccia
superiore P (z + dz) dx dy sommata al peso del liquido ρg dx dy dz compreso tra
le due superfici.
La forza di pressione sulla faccia inferiore P (z) dx dy è quindi tale che :
P (z + dz)dxdy + ρ(z)gdxdydz = P (z)dxdy
dalla quale
P (z + dz) − P (z) = −ρgdz
∂P
= −ρ g
∂z
15
che si integra immediatamente fornendo
P + ρgz = cost
dove ρ è la densità del liquido e g il modulo dell’accelerazione di gravità.
Il valore di P + ρU , dove U è l’energia potenziale per unità di massa, non
cambia se lo valutiamo in punti diversi del liquido.
Questo risultato è noto in generale come Legge di Stevino: essa afferma che in
un liquido in equilibrio idrostatico nel campo di gravità, la differenza di pressione
fra due punti è data dalla pressione esercitata alla base da una colonna di quel
liquido, avente altezza uguale al dislivello fra i due punti.
Se h è il dislivello ed S è l’area della base del cilindro, il peso della colonna di
liquido vale
mg = ρghS
dunque la pressione alla base P =
mg
S
= ρgh , vedi Fig.9.
Figure 9: La pressione aumenta con la profondità e sostiene il peso del liquido in
quiete.
Una dimostrazione sperimentale di questa legge fu suggerita da Blaise Pascal
nel 1648, mostrando come si potesse provocare la rottura di una botte semplicemente collegandola ad un tubo verticale (di sezione qualsiasi) e riempiendo
quest’ultimo d’acqua.
16
Alla base del tubo e dunque sulla superficie interna della botte:
P = Patm + ρgh
dove h è l’altezza dell’acqua nel tubo (si trascura l’altezza della botte). Naturalmente, la pressione atmosferica è presente, anche all’esterno della botte, per
cui la quantità ρgh fornisce direttamente la differenza di pressione a cui è sottosposta la parete della botte. Basta allora, per esempio, che h = 10 m perchè
questa differenza di pressione sia già dell’ordine della pressione atmosferica, infatti ρgh = 1000 · 9.8 · 10 = 0.98 · 105 pascal.
Da questo risultato segue che la pressione a cui viene sottoposto un subacqueo
mentre scende nelle profondità marine, cresce di circa una atmosfera ogni 10 metri
di discesa. Analogamente si deduce che non si può aspirare acqua da un pozzo
profondo più di 10 metri.
17
1.6
Il barometro di Torricelli
Fu Evangelista Torricelli, allievo di Galileo, il primo ad utilizzare la legge di
Stevino per mettere in evidenza sia l’esistenza del vuoto che l’esistenza di una
pressione esercitata dall’atmosfera presente intorno a noi.
Egli inventò per questo uno strumento, oggi noto appunto come Barometro
di Torricelli, ovvero Barometro a mercurio. Si tratta semplicemente di un tubo
chiuso ad una estremità che, riempito preventivamente di mercurio, viene capovolto in una bacinella ripiena dello stesso liquido, vedi Fig.10.
Figure 10: Il barometro di Torricelli. Il peso del Mercurio è sostenuto dalla
pressione atmosferica.
Il pelo libero del liquido nel tubo e la superficie libera nella bacinella non
stanno alla stessa altezza, la differenza di altezza h è dovuta al fatto che le due
superfici libere del mercurio non si trovano alla stessa pressione.
Sulla superficie del mercurio nella bacinella si esercita infatti la pressione
atmosferica Pa , mentre il pelo libero nel tubo si trova a pressione nulla (nel
volume di tubo che si è vuotato del mercurio preesistente, la pressione residua è
18
uguale alla tensione di vapore THg del mercurio a temperatura ambiente, molto
inferiore alla pressione atmosferica).
Dalla legge di Stevino, segue che
Pa − THg ≈ Pa ≈ ρHg gh
dove ρHg è la densità del mercurio (13595.5Kg/m3), mentre g è l’accelerazione
di gravità.
Sperimentalmente risulta che, in condizioni normali e sul livello del mare
h = 760 mm.
Una unità di misura di pressione legata direttamente a questa legge è il Torricelli (Torr). Essa è definita come la pressione esercitata alla base da una colonna
di mercurio alta 1mm (per cui viene anche detta millimetro di mercurio, mmHg).
Questa è l’unità attraverso la quale, per esempio, viene tutt’oggi espressa la pressione sanguigna.
Risulta
1T orr ≡ 1mmHg ≡ ρgh = 13.6103 Kgm−3 ×9.8 ms−2 ×10−3 m = 133.3 Nm−2 = 133.3 P ascal
19
1.7
Paradossi idrostatici
Consideriamo i recipienti rappresentati nella figura riportata sotto (vedi Fig.11).
Figure 11: Legge di Stevino. La pressione aumenta con la profonditá e sostiene
il peso del liquido in quiete. Effetti sulle pareti dei recipienti.
Tutti hanno la stessa superficie di base S e sono riempiti di liquido fino alla
stessa altezza. Chiaramente non contengono la stessa massa di liquido eppure,
per quanto ci assicura la legge di Stevino, la pressione che il liquido esercita sulle
basi dei recipienti è la stessa nei tre casi.
Dunque la forza di pressione sulla base non può coincidere necessariamente
con il peso del liquido, perchè esso, nei tre casi è diverso !
D’altronde se dovessimo sostenere i recipienti, lo faremmo applicando alle loro
basi un forza uguale ed opposta al peso del liquido in essi contenuto (ammettiamo,
per semplicità, di poter trascurare la massa del contenitore in confronto con quella
del liquido che contiene). Come si esce da questo apparente paradosso?
Occorre ricordare che le forze di pressione sono ortogonali alle superfici su cui
agiscono: è immediato notare che
• nel caso a), la pressione sulle superfici laterali non ha componente verticale,
mentre le varie componenti orizzontali si elidono a vicenda;
• nel caso b) e c), la pressione sulle superfici laterali continua a produrre una
forza risultante sulle pareti che non ha componente orizzontale, ma, essendo
le superfici oblique, ha componente verticale.
E’ proprio questa componente verticale, che si origina sulle pareti laterali, che
sommata algebricamente alla forza di pressione sul fondo, uguaglia il peso del
liquido(!) qualunque sia la forma del recipiente!
20
Per renderci conto quantitativamente che le cose stanno proprio cosı̀ consideriamo un recipiente qualsiasi riempito di un liquido (vedi Fig.12).
Figure 12: La pressione produce sul fondo del recipiente una forza uguale al peso
totale del liquido.
~ a contatto con il liquido, la colonna di liquido
Su ogni elemento di superficie dS
sovrastante, di altezza h, esercita una pressione che per la legge di Stevino vale:
P = ρgh
La forza risultante sulla superficie vale
~
dF~ = P dS
~ è un vettore che ha per modulo l’area dS, per direzione quella della
dove dS
normale all’elemento di superficie considerato e come verso quello uscente dal
volume del liquido. Quest’ultima è la definizione di superficie orientata (vedi
Fig.13).
Nel nostro problema siamo interessati alla componente verticale di dF~ ,
Introduciamo dunque il versore k̂ = (0, 0, 1) dell’asse z.
Possiamo scrivere che la componente verticale di dF~ nel modo seguente:
~ = ρ g h k̂ · dS
~
dFz = k̂ · dF~ = P k̂ · dS
21
Figure 13: La superficie orientata
Osserviamo che, pur di effettuare una opportuna rotazione intorno all’asse z,
si può sempre fare in modo che il versore normale alla superficie ~n si trovi nel
piano zy (vedi Fig. 13). Risulta allora evidente che
~ = da db cos θ = da db cos θ = dx dy
k̂ · dS
~ lungo k̂ , cioè secondo la
fornisce il valore della proiezione della superficie dS
verticale.
Nel nostro caso, essa è dunque, semplicemente, l’area di base della colonna di
liquido che stiamo considerando, misurata proprio nel piano di cui k̂ è la normale,
cioè nel piano orizzontale. L’elemento si superficie è stato proiettato sul piano
orizzontale.
~ non è altro che il volume dV del liquido che
Ne segue che la quantità hk̂ · dS
costituisce la colonna, per cui abbiamo
dFz = ρ g dV = g dm
dove dm è la massa di liquido contenuta nella colonna sovrastante la superficie
~
dS.
Integrando allora su tutta la superficie del recipiente bagnata dal liquido, ecco
che la componente verticale della forza dovuta alla pressione del liquido nei vari
punti della superficie del recipiente, uguaglia il peso del liquido stesso.
22
Per concludere questo argomento, verifichiamo anche che le forze di pressione
sulle pareti del recipiente non possono produrre una risultante avente componente
orizzontale (infatti, non si è mai visto un recipiente pieno di liquido, appoggiato
ad un tavolo orizzontale, accelerare a causa della pressione del liquido sulle sue
pareti!).
Consideriamo la figura 14 ed occupiamoci, per esempio, della componente y
della forza di pressione sulla parete del recipiente (vedi Fig.14).
Figure 14: La pressione produce sulle pareti del recipiente una forza totale con
componente orizzontale nulla.
Consideriamo la porzione di liquido compresa fra z e z + dz e suddividiamo
ancora tale porzione di liquido attraverso piani paralleli al piano z − y e distanti
fra di loro dx. Ognuno di questi parallelepipedi individua sulla superficie del
recipiente due superfici dS1 e dS2 rispettivamente con coordinata y1 < y2 .
La pressione agente su entrambe le superfici è la stessa, perché esse si trovano
alla medesima altezza z.
La componente della forza di pressione nella direzione y è data allora da:
~1 · ĵ + P dS
~2 · ĵ
dFy = P dS
dove ĵ è il versore dell’asse y.
23
~ ,risulta
Da quanto detto prima, circa il significato del prodotto scalare k̂ · dS
evidente che
~1 = −ĵ · dS
~2 = dx dz
ĵ · dS
Le due superfici dS1 e dS2 sul piano x − z sono quindi uguali e la componente
y della forza di pressione agente sulla porzione di superficie del recipiente individuata dal parallelepipedo infinitesimo considerato risulta identicamente nulla.
Integrando sulla coordinata x, abbiamo che anche la componente y della forza
di pressione agente sulla intera superficie del recipiente, compresa fra z e z + dz è
nulla. Integrando anche su z, concludiamo che non c’ è componente y della forza
di pressione sulla intera superficie del recipiente.
Analogamente possiamo procedere per la componente x, per cui resta dimostrato che la pressione sulla parete di un recipiente qualsiasi non produce
componente orizzontale.
1.8
I vasi comunicanti
La legge di Pascal e i vasi comunicanti.
Una conseguenza della legge di Stevino è la legge di Pascal. Questa stabilisce
che in un liquido in equilibrio, in presenza della forza di gravità, la pressione è la
stessa in tutti i punti che si trovano alla stessa quota rispetto al suolo.
Da questa legge discende direttamente il Principio dei vasi comunicanti.
Se diversi recipienti contenenti lo stesso liquido sono posti in comunicazione
fra di loro, (vedi Fig.15) le superfici libere, se aperte, o comunque se tutte in
comunicazione diretta fra di loro, si trovano tutte allo stesso livello, indipendentemente dalla forma e dalla capacità dei diversi recipienti.
Naturalmente, questo non è vero se i liquidi (immiscibili) sono di natura
diversa, come, per esempio, acqua e olio, benzina e acqua, mercurio e acqua, etc.
In questo secondo caso, i liquidi si dispongono su altezze tali che la pressione
esercitata da una colonna, in un qualunque punto assegnato, coincide con la
pressione esercitata in quello stesso punto dall’altra colonna (i.e., la pressione è
comunque una funzione continua.) .
1.9
Il Principio di Archimede
Consideriamo un corpo immerso in un liquido. La legge di Archimede dice che
un corpo immerso in un liquido riceve una spinta dal basso verso l’alto pari al
peso del liquido spostato vedi Fig.16.
Iniziamo considerando un corpo che abbia forma di parallelepipedo rettangolo
(vedi Fig.17). le forze di pressione sulle superfici laterali si elidono a vicenda.
Invece le pressioni sulla base e sulla superficie ad essa corrispondente in alto (a
distanza h dalla base) non sono uguali, ma differiscono, per la legge di Stevino,
della quantità
∆P = ρgh
24
Figure 15: I vasi comunicanti e la legge di Pascal. I liquidi si dispongono su
altezze tali che la pressione esercitata da una colonna, in un qualunque punto
assegnato, coincide con la pressione esercitata in quello stesso punto dall’altra
colonna.
ne segue che la risultante delle forze di pressione esercitate dal liquido sul corpo
è una forza diretta verso l’alto (la pressione è maggiore in basso) che vale (legge
di Archimede):
F = S∆P = ρghS = ρgV = gM
dove V è il volume del parallelepipedo ed M la massa di liquido in esso contenuto.
Questo risultato, ottenuto nel caso di un corpo avente una simmetria particolarmente semplice, vale, come è noto, in generale. La dimostrazione è semplicissima. Consideriamo per questo un corpo solido di forma qualsiasi immerso in
un liquido, per esempio acqua, come mostrato in Fig.16.
Chiamiamo S la sua superficie esterna. Immaginiamo che la superficie S,
invece del corpo , racchiuda idealmente un corpo fatto dallo stesso liquido in cui
è immerso. Risulta ovvio che il corpo sarebbe in equilibrio!
Questo significa che il peso del liquido viene equilibrato dalle forze di pressione
del liquido stesso, ovvero che le forze di pressione del liquido esercitano sulla
superficie S una forza esattamente uguale al peso del liquido racchiuso entro la
superficie S.
Tuttavia, per lo studio della statica di un corpo solido (corpo rigido), non
basta conoscere le forze che vi agiscono sopra, ma anche il loro punto di applicazione!
25
Figure 16: Il peso del liquido stesso è sostenuto dalla spinta di Archimde
Qualè il punto di applicazione della spinta di Archimede? Il ragionamento
fatto sopra circa il valore della spinta può di nuovo aiutarci e portarci alla giusta
conclusione. E’ infatti chiaro che il corpo, essendo in equilibrio indifferente nel
liquido, non solo riceve una spinta uguale al suo peso, ma anche il momento di
questa spinta rispetto al baricentro deve essere nullo, cosı̀ come è nullo quello
della forza peso.
In questo modo sul corpo non solo la risultante totale delle forze sarà nulla,
ma lo sarà anche il loro momento (altrimenti il corpo ruoterebbe su se stesso).
Ne segue che la spinta di Archimede deve essere pensata applicata nel baricentro del volume di liquido spostato (centro di galleggiamento).
Questo risultato è importante quando si consideri un corpo immobile, per
esempio una nave, che galleggi in un liquido, vedi Fig.20.
All’equilibrio il baricentro B della nave ed il centro di galleggiamento C della
stessa saranno allineati secondo la verticale, in modo da non produrre nessun
momento complessivo (all’equilibrio sia la risultante delle forze che quella dei
momenti devono essere nulle).
Se il baricentro si trova sotto il centro di galleggiamento, per piccole oscillazioni intorno al punto di equilibrio, il momento delle forze che viene ad originarsi tende, normalmente, a ripristinare l’equilibrio e, dunque, l’equilibrio è stabile. Ecco perchè, in alcuni casi, si appesantisce la parte bassa della chiglia con
materiali di alta densità, per abbassare il baricentro del natante vedi Fig. 19.
Il caso in cui B è sotto C non è l’unico caso possibile di equilibrio stabile per
26
Figure 17: Un corpo immerso in un liquido riceve una spinta verso l’alto pari al
peso del liquido spostato.
un oggetto galleggiante. Infatti il problema della stabilità non è cosı̀ immediato
come potrebbe sembrare perché mentre, se il corpo è rigido, il baricentro segue
chiaramente lo spostamento del corpo, il centro di spinta, in genere non lo fa
poiché, di solito cambia la forma della parte immersa (pur non cambiando il
volume!).
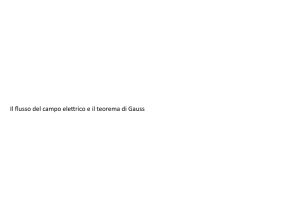
Supponiamo che B si trovi sopra C (vedi Fig.20) Immaginiamo di spostarci di
poco dalla posizione di equilibrio: mentre B, ovviamente, non cambia posizione
rispetto al natante, il nuovo centro di spinta C ′ , a causa della diversa geometria
del volume di liquido spostato, può non coincidere, rispetto al natante, con il
precedente centro di spinta C. Se la verticale che passa per C ′ incontra la retta
definita dal baricentro B e dal centro di spinta C all’equilibrio in un punto M
che è sopra B, allora, di nuovo, abbiamo equilibrio stabile (ovvero il natante è
soggetto ad una coppia che tende a riportarlo in equilibrio), altrimenti la nave si
rovescia !
Il punto M è detto metacentro. Per piccole oscillazioni intorno all’equilibrio,
i centri di spinta si trovano su un arco di circonferenza di cui M è il centro .
27
Figure 18: Se il centro di spinta è più in alto del centro di massa l’equilirio è
stabile.
1.10
Elementi utili di algebra vettoriale
Alcune definizioni
• Grandezza scalare.
Si dice che una grandezza fisica è scalare quando il suo valore non cambia
per rotazioni del sistema di riferimento. Sono scalari l’energia cinetica,
l’energia potenziale, la temperatura ecc.
• Grandezza vettoriale.
Una grandezza fisica è detta vettoriale quando, per rotazioni del sistema
di riferimento, si trasforma come la posizione di un punto materiale. Sono
vettori la velocità, la forza, l’accelerazione, etc...
In generale, fissato un riferimento cartesiano ortogonale, un vettore ~v è
completamente individuato dalle sue componenti cartesiane vx , vy , vz
~v = (vx , vy , vz )
• Prodotto scalare.
~ e B
~ la quantità (per
Si dice prodotto scalare o interno di due vettori A
28
Figure 19: Se il centro di spinta è più in alto del centro di massa l’equilirio è
stabile.
convenzione, indici ripetuti si intendono sommati da 1 a 3):
~ ·B
~ = Ax Bx + Ay By + Az Bz = Ai Bi = δij Ai Bj
A
dove δij è il simbolo di Kronecker e coincide con la matrice identità 3 × 3 .
~·B
~ =B
~ · A.
~
Chiaramente il prodotto scalare è commutativo A
• Prodotto vettoriale.
~eB
~ il vettore :
Si chiama prodotto vettoriale o esterno di due vettori A
~∧B
~ =A
~×B
~ = ( Ay Bz − Az By , Az Bx − Ax Bz , Ax By − Ay Bx )
A
~ × B)
~ i = ǫijk Aj Bk
(A
dove ǫijk è il tensore a tre indici completamente antisimmetrico, che vale
1 se la terna ijk è una permutazione pari (ciclica) di 123,
−1 se si tratta di una permutazione dispari (permutazione ciclica + una
inversione),
29
Figure 20: Per avere equilibrio stabile il Metacentro deve essere più in alto del
centro di massa.
0 se almeno due indici sono uguali.
I soli suoi valori non nulli sono dunque:
ǫ123 = ǫ231 = ǫ312 = 1
ǫ213 = ǫ132 = ǫ321 = −1
Dalla definizione risulta che il prodotto vettoriale è antisimmetrico, i.e.
~ ×B
~ = −B
~ ×A
~
A
• Campo scalare.
Si chiama campo scalare una funzione f (~x, t) a valori scalari, per esempio
il campo di temperature in un corpo assegnato. Il campo è detto costante
se non dipende dal tempo ed è detto uniforme se non dipende dal punto ~x.
• Campo vettoriale.
~ (~x, t) a valori vettoriali, per esempio
Si dice campo vettoriale una funzione V
30
il campo di velocità all’interno di un liquido in moto.
Di nuovo, si parla di campo costante quando esso è indipendente dal tempo
e di campo uniforme quando è indipendente dalle coordinate spaziali.
• Superficie chiusa.
Una superficie si dice chiusa se racchiude un volume, come per esempio
quella di una sfera, di un cubo, etc.
• Superficie aperta.
E’ una superficie non chiusa, necessariamente essa è limitata da un bordo
Γ.
• Superficie orientata.
In ogni punto di una superficie descritta da un vincolo derivabile è definita la
retta perpendicolare al piano tangente alla superficie nel punto dato. Se la
superficie è chiusa, allora la normale alla superficie in un suo punto generico è il versore diretto secondo la retta perpendicolare alla superficie nel
punto dato, orientato in modo che esca dal volume racchiuso dalla superficie stessa. Se la superficie è aperta, occorre definire un verso (arbitrario) di
circolazione sul suo bordo Γ. Il verso della normale alla superficie è definito
in modo che un osservatore allineato secondo tale verso veda l’orientamento
definito su Γ come antiorario.
• Flusso attraverso una superficie.
~ si
Dato un campo vettoriale V~ ed una superficie orientata infinitesima dS,
~ attraverso la superficie dS
~ il prodotto scalare:
chiama flusso di V
~ · dS
~
dΦ = V
1.11
Operatori di campo
Si definiscono tre operatori che agiscono sui campi (scalari o vettoriali):
• Gradiente.
E’ un operatore lineare che applicato ad un campo scalare genera un campo
vettoriale nel modo seguente:
grad(f (~x)) = ∇(f (~x)) =
=(
∂f (~x) ∂f (~x) ∂f (~x)
,
,
)
∂x
∂y
∂z
Quest’operatore si scrive in modo compatto definendo l’operatore ∇ (nabla):
∇ = (∂x , ∂y , ∂z ) = grad f (~x) = ∇f (~x) = (∂i f )
31
La direzione del grad f (~x) (calcolato in un punto x0 , y0 , z0 ) è quella nella
quale la derivata direzionale calcolata in quel punto è massima. Il valore
massimo della derivata direzionale è pari al modulo del gradiente.
La derivata direzionale nella direzione del versore û , indicata con ∇û f (~x)
è la variazione della funzione f (x, y, z) per unità di spostamento nella direzione di û. E’ la forma vettoriale della comune derivata e viene definita
come:
f (~x + hû) − f (~x)
∇û f (~x) = ∇f (~x) · û = lim
h→0
h
La derivata direzionale nella direzione û si scrive anche come:
d
~ = ux ∂x + uy ∂y + uz ∂z
= û · ∇
dû
Il vettore gradiente è perpendicolare alla curva di livello in x0 , y0 se z =
f (x, y) e perpendicolare alla superficie F (x, y, z) = 0.
• Divergenza.
E’ un operatore differenziale che applicato ad un campo vettoriale genera
un campo scalare:
~ (~x) = ∂x Vx (~x) + ∂y Vy (~x) + ∂z Vz (~x)
div V
In termini dell’operatore nabla, la divergenza si scrive come prodotto scalare
~ =∇
~V
~ = ∂i Vi
div V
• Rotazione.
E’ un operatore differenziale che applicato ad un campo vettoriale genera
un altro campo vettoriale nel modo seguente:
~ (~x)
rotV
= ( ∂y Vz (~x) − ∂z Vy (~x) , ∂z Vx (~x) − ∂x Vz (~x) , ∂y Vx (~x) − ∂x Vy (~x) )
che si può scrivere come
~ =∇
~ ×V
~ =⇒ (rotV
~ )i = ǫijk ∂i Vk
rotV
Un campo vettoriale è detto irrotazionale in un volume aperto Ω se la sua
rotazione è identicamente nulla in quel volume, cioè:
~ (~x) = 0
rotV
per ogni ~x elemento di Ω .
Un campo vettoriale ottenuto come gradiente di un campo scalare è sempre
irrotazionale.
32
~ è un campo
Questa condizione vale anche al contrario, nel senso che se V
vettoriale il quale, in un volume aperto e connesso Ω dato, ha rotazione
identicamente nulla, allora esiste una funzione scalare F definita in quel
volume Ω , tale che il campo Ω ne è il gradiente.
La funzione F viene detta il potenziale del campo , per ragioni che appariranno chiare più in seguito. Essa non è univocamente determinata, bensı̀
lo è a meno di una qualunque funzione che dipenda unicamente dal tempo.
33
1.12
Il Teorema di GAUSS
Il teorema afferma che il flusso di un campo
superficie chiusa è uguale all’integrale della
racchiuso:
Z
Z
~ dΩ =
div V
Ω
vettoriale uscente da una qualsiasi
divergenza del campo sul volume
Σ
~ dS
~
V
~ è definita come:
La divergenza di un campo vettoriale V
~ = lim
div V
Ω→0
R
S
~ dS
~
V
Ω
dove l’integrale superficiale è il flusso uscente dalla superficie S che racchiude il
volume Ω, centrato nel punto in cui si calcola la divergenza. In parole si può dire
che la divergenza è il flusso uscente dall’unità di volume, nel punto considerato.
Il flusso dΦ uscente da un volume infinitesimo dΩ si può quindi scrivere come
dΦ = divV dΩ
Dimostrazione.
~ (~x) ed una superficie chiusa infinitesima cubica
Sia dato un campo vettoriale V
, vedi Fig.21, che racchiuda il volume infinitesimo dΩ
~ uscente dal volume infinitesimo attraverso le superfici
Il flusso del campo V
laterali parallele al piano x − z è dato da
dx dz( Vy (~x + 1/2 dy~j) − Vy (~x − 1/2 dy~j))
il segno negativo del secondo termine è dovuto al fatto che la superficie è orientata
con versore uscente dal volume infinitesimo,
dx dz( Vy + 1/2∂y Vy dy) − dx dz(Vy − 1/2∂y Vy dy) = ∂y Vy dxdydz
Analogamente nella direzione dell’asse x e z:
∂x Vx dxdydz
∂z Vz dxdydz
si ha quindi che il flusso totale uscente dal volume infinitesimo è dato da
~ dxdydz =
dφ = (∂x Vx + ∂y Vy + ∂z Vz ) dxdydz = div V
~V
~ dxdydz = (∂i Vi ) dΩ
∇
Si consideri un volume qualunque Ω interno ad una superficie chiusa Σ, costituito dall’unione di infiniti volumetti infinitesimi, vedi Fig.22.
34
Figure 21: La Divergenza, calcolata in un punto, non è altro che il flusso uscente
da una superficie ininitesima chiusa diviso per il volume racchiuso.
La somma dei flussi uscenti da tutti volumetti è dato da:
Z
Ω
~ dΩ
div V
E’ importante notare che i flussi uscenti dalla faccie laterali dei volumi infinitesimi interni al volume si cancellano in quanto uscendo da un volume entrano
in quello adiacente. Ne risulta che solo i flussi uscenti dalla superficie esterna non
sono cancellati, vale quindi il teorema di Gauss:
L’integrale di volume della divergenza di un campo vettoriale è uguale al flusso
totale uscente dalla superficie che racchiude il volume:
Z
Ω
~ dΩ =
div V
35
Z
Σ
~
V~ dS
Figure 22: Il teorema di Gauss
1.13
Il Teorema di STOKES
Il teorema di Stokes ( o della rotazione) afferma che data una qualsiasi superficie
~ (vedi Fig.23) allora, detto
aperta e orientata S immersa in un campo vettoriale V
Γ il suo bordo orientato, si ha che:
I
Γ
~ d~l =
V
Z
S
~ dS
~
rotV
Dimostrazione.
Si consideri il percorso infinitesimo, di lati dy e dz, centrato nel punto ~x,
~ = dydz orientata come mostrato in Fig. 24.
perimetro della superficie dS
L’orientamento del sistema di riferimento è scelto in modo tale che la superficie
considerata sia nel piano y − z.
Il verso (positivo) di percorrenza del perimetro è quello per il quale ruotando
~
la vite destrorsa (il cavatappi) avanza nella direzione di dS.
Si calcoli l’integrale di linea del campo V~ sul percorso infinitesimo, come
somma dei contributi calcolati sui quattro lati:
• Lato 1
Z
1
~ d~l = V
~ (~x − 1/2~kdz) ~jdy = (Vy (~x) + 1/2∂z Vy dz) dy
V
36
Figure 23: Teorema della circuitazione
• Lato 2
Z
2
~ d~l = V
~ (~x + 1/2~jdy) ~kdz = (Vz (~x) + 1/2∂y Vz dy) dz
V
• Lato 3
Z
~ (~x + 1/2~kdz) −jdy
~
V~ d~l = V
= −(Vy (~x) − 1/2∂z Vy dz) dy
Z
~
~ (~x − 1/2~jdy) −kdz
V~ d~l = V
= −(Vz (~x) − 1/2∂y Vz dy) dz
3
• Lato 4
4
La somma dei quattro contributi è l’integrale cercato:
~ )x dy dz
(∂z Vy − ∂y Vz ) dz dy = (∇ × V~ )x dy dz = (rotV
L’integrale di linea sul percorso infinitesimo è quindi uguale al flusso del
~ attraverso la supeficie dS.
~ Questa relazione vale qualunque sia
vettore rotV
l’orientamento della superficie e ovviamente non dipende da come sono orientati
gli assi cartesiani.
Si consideri ora una superficie § aperta qualunque, vedi Fig.25
Questa superficie può essere considerata come costituita dall’insieme di infinite superfici infinitesime, su ciascuna delle quali vale quanto detto precedentemente.
37
Figure 24: Circuitazione infinitesima
Se si sommano tutti gli integrali sui circuiti infinitesimi i contributi sui lati
adiacenti interni alla superficie si annullano perchè vengono percorsi in senso
opposto, e quindi danno contributo totale nullo.
Solo i lati coincidenti con il perimetro esterno Γ della superficie § danno
contributo non nullo, vale quindi il teorema di Stokes:
I
Γ
~ d~l =
V
Z
S
~ ) · dS
~
rot(V
38
Figure 25: Il teorema di Stokes
1.14
Esercizi di calcolo vettoriale
• Dimostrare che:
~ · (B
~ × C)
~ =B
~ · (C
~ × A)
~ =
A
~ · (A
~ × B)
~
=C
Dimostrazione.
~ · (B
~ × C)
~ = Ai ǫijk Bj Ck = ǫijk Ai Bj Ck =
A
come sappiamo ǫijk = ǫjki, quindi
~ · (C
~ × A)
~ =
ǫijk Ai Bj Ck = ǫjkiAi Bj Ck = Bj ǫjki Ai Ck = B
come volevamo dimostrare.
• Dimostrare che:
~ × (B
~ × C)
~ = B(
~ A
~ · C)
~ − C(
~ A
~ · B)
~
A
Dimostrazione.
Calcoliamo la componente iesima del vettore risultato:
39
~ × (B
~ × C))
~ i = ǫijk Aj (B
~ × C)
~ k = ǫijk Aj ǫklm Bl Cm = ǫijk ǫklm Aj Bl Cm =
(A
Consideriamo il prodotto ǫijk ǫklm . Ruotando gli indici del primo termine si
ha
ǫijk ǫklm = ǫkij ǫklm = δil δjm − δim δjl
dove δij è la delta di Kronecker.
Applicando questa relazione si ha che
ǫijk ǫklm Aj Bl Cm = (δil δjm − δim δjl )Aj Bl Cm =
~ A·
~ C)−
~ C(
~ A·
~ B))
~ i
= δil δjm Aj Bl Cm −δim δjl Aj Bl Cm = Bi Aj Cj −Ci Al Bl = (B(
come volevamo dimostrare.
~ è un campo vettoriale continuo e derivabile, allora:
• Dimostrare che se V
~) =0
grad(rotV
Dimostrazione:
~ ) = ∂i (rotV
~ )i = ∂i ǫijk ∂j Vk = ǫijk ∂i ∂j Vk =
div(rotV
dove la posizione delle derivate nei vari termini è ovviamente importante.
Nella sommatoria di 27 termini cosı̀ ottenuta solo quelli con i 6= j 6= k sono
diversi da 0.
Abbiamo quindi solo 6 termini raggruppati due a due come segue
k = 1 −→ ǫ231 ∂2 ∂3 V1 + ǫ321 ∂3 ∂2 V1 = ∂2 ∂3 V1 − ∂3 ∂2 V1 = 0
perché le derivate parziali miste sono uguali. La stessa cosa viene ripetuta
per k = 2ek = 3.
La somma totale è quindi nulla, come dovevamo dimostrare.
• Analogamente si dimostra che rot(grad f (~x)) = 0, dove f è un campo
scalare.
40
• Sia ~v (~x) un campo vettoriale continuo e derivabile, dimostrare che:
~ v
~v × rot(~v ) = grad(1/2v 2) − (~v · ∇)~
Dimostrazione.
Il risultato deve essere un vettore. Calcoliamone quindi la componente
iesima.
(~v × rot(~v))i = ǫijk vj ǫklm ∂l vm = (δil δjm − δim δjl )vj ∂l vm = vj ∂i vj − vl ∂l vi =
~ i = (grad(1/2v 2) − (~v · ∇)~
~ v )i
= ∂i (1/2v 2) − (~v · ∇)v
come volevamo dimostrare.
• Provate voi a dimostrare che: rot(rot ~(v)) = grad(div ~v ) − ∇2~v
41
2
Idrodinamica
2.1
Introduzione
Il compito dell’idrodinamica è quello di studiare il moto dei liquidi. Esistono
sostanzialmente due modi per affrontare il problema:
• Punto di vista lagrangiano (Joseph Louis de Lagrange (1736-1813).
Si considera un elemento infinitesimo di liquido: al tempo t0 esso si troverà
nel punto P~0 (x0 , y0, z0 ). Al passare del tempo, questo elemento di liquido
si sposterà, e le sue coordinate saranno funzioni del tempo:
x = X(P~0 , t0 , t)
y = Y (P~0 , t0 , t)
z = Z(P~0 , t0 , t)
Conoscendo le funzioni X, Y , Z per ogni (P~0 , t0 ) , conosceremo naturalmente il moto di ogni elemento di liquido.
• Punto di vista euleriano (Leonhard Euler 1707-1783).
Si fissa un sistema di riferimento e sia (x, y, z) un generico punto P . Il
moto del liquido sarà noto se conosceremo, ad ogni tempo, la funzione
vettoriale ~v(x, y, z, t) che fornisce la velocità del volumetto infinitesimo dV
che, al tempo t, si trova nel punto P . In questo caso non seguiamo ciascuna
particella di liquido durante il suo moto, bensı̀ determiniamo, istante per
istante e punto per punto, la legge di velocità del liquido. Noi adotteremo
questo secondo punto di vista.
La funzione ~v (x, y, z, t) è detta, in generale, campo di velocità, ed è un campo
vettoriale.
2.2
L’equazione di continuità
Consideriamo un liquido in movimento descritto dal campo di velocità euleriano
~v (x, y, z, t).
La portata del fluido attraverso la superficie è definita come la quantità di
liquido che attraversa la superficie nell’unità di tempo.
Sia data una superficie S all’interno di un liquido in movimento e consideriamola costituita dall’insieme di tante superfici sufficientemente piccole (infinites~i .
ime) dS
La quantità, in volume, di liquido che attraversa una generica superficie in~ x) posta nel punto ~x è data dal flusso moltiplicato per l’intervallo
finitesima dS(~
di tempo considerato dt:
~ x) · ~v (~x, t)dt
dS(~
42
Il volume di liquido che nel tempo dt fluisce attraverso l’intera superficie S è
dato dalla somma di tutti i contributi infinitesimi calcolati sulla superficie:
Q=
Z
S
~
~v(~x) · dS
Accanto alla portata volumetrica Q si definisce talvolta la portata P (senza
altri aggettivi) come la quantità di massa che attraversa la superficie assegnata
nell’unità di tempo.
R
~
Evidentemente si ha P = S ρ(~x)~v (~x) · dS.
Ricordando che in un liquido ideale la densità costante, risulta semplicemente
P = ρQ.
Nel caso particolare in cui la superficie S sia chiusa, ovvero che racchiuda
un volume V , è evidente che se scegliamo l’orientamento della superficie secondo
la normale uscente al volume, il flusso ΦS del campo vettoriale ρ~v attraverso la
superficie S fornirà semplicemente la massa di liquido che, nell’unità di tempo,
lascia il volume racchiuso dalla superficie S.
Il campo vettoriale ρ~v è detto densità di corrente del liquido, con ovvio significato.
La legge di conservazione della massa ci consente allora di affermare che, detta
M(t) la massa di liquido presente nel volume V , allora:
dM
d( ρdV )
−
=− V
=
dt
dt
R
Z
S
~
ρ~v (~x) · dS
Questa equazione è l’equazione di continuità in forma integrale.
Essa afferma che l’integrale del flusso uscente dalla superfice è uguale alla
variazione totale della quantità di liquido contenuto all’interno dalla superficie.
E’ il prototipo di ogni legge di conservazione e può essere messa in forma
differenziale attraverso il Teorema di Gauss, valido per ogni campo vettoriale. Si
può infatti scrivere per il campo della densità di corrente:
Z
S
Essendo
~=
ρ~v dS
Z
V
div(ρ~v) dV
dM
d( ρdV )
−
=− V
= ΦS =
dt
dt
per ogni superficie, segue che:
R
div(ρ~v ) = −
Z
V
div(ρ~v )dV
dρ
dt
Questa è la prima equazione fondamentale dell’idrodinamica. Esprime matematicamente il principio di conservazione della massa. Come si vede è una proprietà
locale,valida in ogni punto ~x. La massa si conserva IN OGNI PUNTO!
43
Nel caso particolare di un liquido ideale la densità è costante:
−
dρ
= 0 = div(ρ~v )
dt
Il campo di velocità di un liquido ideale ha divergenza nulla.
44
2.3
Equazioni del moto e la legge di Stevino
(Leonhard Euler (1707 − 1783) fisico matematico di Basilea, allievo di Johann
Beroulli)
Vogliamo scrivere l’equazione del moto per i liquidi perfetti.
Per fare questo consideriamo un elemento del fluido contenuto in un volume
infinitesimo dV , come indicato in Fig.26. La massa di fluido in esso contenuto è
Figure 26: Legge del moto dei fluidi. Un elemento di fluido soggetto alle forze
di pressione ed alla forza peso.
data dal prodotto della densità per l’elemento di volume
dm = ρdV
La legge fondamentale della dinamica newtoniana collega l’accelerazione della
massa alle forze totali esterne che agiscono su di essa
dm~a = dF~
dove F~ è la risultante delle forza esterne.
Le forze esterne che agiscono sull’elemento di fluido dm, sono di due tipi
45
• le forze di pressione; sono quelle dovute alla presenza del liquido esterno
al volume considerato. Queste forze agiscono sul fluido dm attraverso la
pressione che, dall’esterno del volumetto, agisce sulle sei facce. Se le pressioni sulle sei facce sono sono diverse la risultante delle forze di pressione è
diversa da zero.
• le forze di massa , come le forze del campo gravitazionale, per esempio. In
questo caso, come sappiamo, la forza agente su dm è data da
dF~ = −ρdV gradU(x, y, z)
dove U è il potenziale gravitazionale.
Calcoliamo ora la risultante delle forze di pressione supponendo di conoscere il
campo scalare P (x, y, z). Consideriamo per esempio le forze agenti sulle superfici
perpendicolari all’asse x, vedi Fig.27. Sappiamo che le forze di pressione, in un
Figure 27: La forza risultante di pressione che agisce su un elemento di fluido
nel punto ~x, è dovuta alla variazione (spaziale) della pressione in quel punto.
liquido perfetto, sono perpendicolari alle superfici, e che le superici chiuse sono
orientate con i versori uscenti dal volume dV .
46
La risultante delle forze esterne di pressione, nella direzione x è data dalla
differenza di pressione tra le due superici opposte
dFx = P (x − 1/2dx, y, z) dy dz − P (x + 1/2dx, y, z) dy dz = −
∂P (x, y, z)
dx dy dz
∂x
Nelle altre direzioni si ottiene
dFy = P (x, y − 1/2dy, z) dx dz − P (x, y + 1/2dy, z) dx dz = −
∂P (x, y, z)
dx dy dz
∂y
∂P (x, y, z)
dx dy dz
∂z
Possiamo quindi scrivere la risultante delle forze di pressione come
dFz = P (x, y, z − 1/2dz) dx dy − P (x, y, z + 1/2dz) dx dy = −
dF~ = −grad P dV
Per la legge di Newton vale quindi la relazione
ρ dV ~a = −grad(P )dV − ρgrad(U)dV
dove ~a è l’accelerazione istantanea del fluido contenuto nell’elemento di volume
dV , l’accelerazione lagrangiana.
A questo punto è interessante osservare come da questa equazione possa essere
derivata la legge di Stevino. In caso di equilibrio statico nel campo gravitazionale
possiamo scrivere:
0 = −grad(P ) − ρgrad(U)
Essendo grad(P ) parallelo al grad(U) si deduce, dato il significato del gradiente, che le superfici equipotenziali sono anche isobariche. Nel caso del campo
gravitazionale si ha anche che, all’equilibrio, ρg = grad(P ), cioè le superfici isobariche (ed equipotenziali) sono anche superfici di uguale densità.
Nella direzione verticale z (rivolto verso l’alto), essendo U = gz, si ha
0=−
∂P
∂U
−
∂z
∂z
0=−
∂P
−g
∂z
∂P
= −g
∂z
che integrata da la legge di stevino:
P + gz = cost
47
2.4
Le equazioni del moto di Eulero
Come sappiamo il metodo che usiamo per la desrizione del moto del fluido è il
metodo euleriano.
Come si collega l’accelerazione istantanea del liquido in un punto al campo di
velocità euleriano?
Per definizione la massa dm che al tempo t si trova in ~x(x, y, z) ha velocità
~v (x, y, z, t). Se aspettiamo un tempo dt essa si sposterà in una nuova posizione
x~′ legata a ~x dalla relazione
x~′ = ~x + ~vdt = (x + vx dt, y + vy dt, z + vz dt)
La velocità di dm in questo punto sarà data dal valore del campo di velocità
euleriano nel punto ~x′ ma . . . al tempo t + dt.
Deve quindi essere
~adt = ~v (x + vx dt, y + vy dt, z + vz dt, t + dt) − ~v(x, y, z, t) =
= vx dt
~a = vx
∂~v
∂~v
∂~v
∂~v
+ vy dt
+ vz dt + dt
∂x
∂y
∂z
∂t
∂~v
∂~v
∂~v ∂~v
~ v + ∂~v
+ vy
+ vz
+
= (~v · ∇)~
∂x
∂y
∂z
∂t
∂t
Si possono quindi scrivere in forma vettoriale le equazioni del moto
~ v+ρ
ρ(~v · ∇)~
∂~v
= −grad(ρU) + gradP
∂t
L’equazione del moto ora scritta e l’equazione di continuità div~v = 0 per un
liquido incomprimibile sono chiamate le equazioni di Eulero.
Usando la relazione vettoriale
vi ∂i~v = 1/2grad(v 2) − ~v × rot(~v)
si possono scrivere le equazioni del moto nella forma
−(∇U + ρ−1 ∇P ) = 1/2grad(v 2) − ~v × rot~v + ∂t~v
ovvero
1
grad( v 2 + U + ρ−1 P ) = ~v × rot~v − ∂t~v
2
Un liquido che si trovi in stato di moto irrotazionale (rot~v = 0), diremo che
è soggetto ad un moto di potenziale. La ragione è che, come abbiamo detto
precedentemente, se rot~v = 0 allora esiste una funzione scalare φ tale che ~v =
gradφ. Cioè se il moto è irrotazionale allora il campo di velocità si ottiene da
una opportuna funzione scalare φ che viene chiamata potenziale.
48
Sostituendo nell’equazione di Eulero
grad(1/2v 2 + U + ρ−1 P ) = −∂t~v
si ottiene
grad(1/2v 2 + U + ρ−1 P + ∂t φ) = 0
Sapendo che affinché una funzione di (x, y, z) possa avere gradiente identicamente nullo, in un volume aperto e connesso, occorre e basta che essa sia uniforme
(costante nello spazio). In questo caso si può scrivere che
1/2v 2 + U + ρ−1 P + ∂t φ = f (t)
Ricordiamo che il potenziale φ non è univocamente determinato dalla condizione di avere il gradiente uguale al campo ~v . Gli si può infatti sommare una
qualunque funzione del solo tempo, senza alterare il campo ~v . Si sceglie quindi
questa funzione in modo tale che il suo integrale nel tempo coincida con la funzione f (t).
Fatto questo l’equazione precedente si semplifica nel modo seguente
1/2v 2 + U + ρ−1 P + ∂t φ = 0
Nel caso in cui il liquido sia, per esempio, l’acqua di mare e si stia considerando
la sua superficie , dove la pressione è costante rispetto al tempo ed alla posizione
ed uguale alla presione atmoserica P0 , possiamo assorbire il termine costante di
pressione nel potenziale aggiungendovi il termine ρ−1 P0 t.
In questo modo, trascurando il termine quadratico della velocità, abbiamo
gz + ∂t φ = 0
Questa è l’equazione delle onde di un liquido in un campo gravitazionale,
come le onde del mare.
Nel caso in cui il liquido si muova di moto irrotazionale e stazionario, cioè
con anche ∂t~v = 0 allora l’equazione di Eulero si semplifica ulteriormente
1
grad( v 2 + U + ρ− 1P ) = 0
2
Ovvero la quantità
1/2v 2 + U + P/ρ
risulta essere indipendente dalla posizione in cui viene calcolata, all’interno del
liquido.
Siccome in un liquido ideale anche la densità è costante segue che in un liquido
omogeneo
1/2ρv 2 + ρU + P = costante
nota come Equazione di Bernoulli.
49
2.5
Il teorema di Leonardo
(Leonardo da Vinci (1452-1519) genio universale)
Introduciamo il concetto di linea di flusso e di tubo di flusso. Supponiamo di
essere in condizioni stazionarie; sia dato cioè un campo vettoriale ~v (x, y, z), non
dipendente dal tempo.
Si definisce linea di flusso del campo ~v (x, y, z) passante per un dato qualunque
punto P , quella linea che passa per P ed ha, in ogni suo punto, la tangente
parallela al vettore ~v (x, y, z).,see Fig.28. Da questa definizione si deducono le
equazioni che devono essere soddisfatte dalle linee di flusso:
dx
vx dx
vx
=
;
=
dy
vy dz
vz
cioè , in generale
dx
dy
dz
=
=
vx (x, y, z, t)
vy (x, y, z, t)
vz (x, y, z, t)
In generale le linee di flusso cambiano in funzione del tempo. Se il campo
delle velocit non dipende dal tempo il moto si dice stazionario. In questo caso le
linee di flusso coincidono con le traiettorie delle particelle di fluido. Le traiettorie
vecx(x, y, z, t) sono date dalle equazioni:
d~x
= ~v (x, y, z, t)
dt
Diremo che un liquido si muove, in un dato volume, di moto non vorticoso se
rot~v = 0
in ogni punto del volume considerato. In questo caso all’interno del volume
considerato nessuna linea di flusso può essere chiusa su se stessa. Questo si
dimostra procedendo per assurdo.
Supponiamo che esista una linea di flusso Γ chiusa nel volume considerato. In
questo caso l’integrale di linea di ~v sulla curva Γ:
I
Γ
~ 6= 0
~v dl
perchè in ogni punto ~v è parallelo a d~l. Essendo Γ completamente interna al
liquido, esiste sempre una superficie S, anch’essa interna al liquido, che ha Γ
come bordo. Per il Teorema di Stokes, tuttavia, deve anche essere
I
Γ
~v d~l =
Z
Σ
~
rot~v(~x) dS
e quindi rot~v non può essere identicamente nullo. Questo risultato chiarisce, fra
l’altro, l’origine del nome rotore per l’operatore differenziale ∇×.
50
Figure 28: Le linee di flusso sono sempre parallele alla velocità euleriana
Nel seguito, salvo diverso avviso, tratteremo il caso di moto non vorticoso
(irrotazionale).
Data una superficie S, chiameremo tubo di flusso che si appoggia su S il
volume definito dall’insieme delle linee di flusso che attraversano S. Chiameremo
poi parete del tubo di flusso la superficie definita dalle linee di flusso che si
appoggiano sul bordo della superficie S,
Osserviamo che, data la definizione di tubo di flusso, il liquido in moto non
può attraversare la parete laterale perchè, sulla parete, la velocità del liquido non
ha componente ortogonale.
Consideriamo allora due superfici S1 ed S2 che si appoggiano entrambe allo
stesso tubo di flusso. (vedi Figura 29). Consideriamo il volume V definito dalla
superficie S costituita da S1 ed S2 e dalla superficie laterale S del tubo di flusso
che va da S1 ad S2 .
Applichiamo a questo volume il teorema della divergenza del vettore densità
di corrente J~ = ρ~v :
0=
Z
V
div J~ dV =
Z
V
div(ρ~v) dV =
Z
ST OT
ρ~v d~s =
Z
S1
J~ d~s +
Z
S2
~ s+
Jd~
Z
S
~ s
Jd~
per definizione di superficie laterale di tubo di flusso, l’integrale su S è nullo e
quindi:
Z
Z
~
~ s=0
Jd~s +
Jd~
S1
S2
51
Figure 29: Il tubo di flusso ed il teorema di Leonardo
Osserviamo che nei due integrali rimasti l’orientamento delle due superfici
è quello definito dal Teorema di Gauss, ovvero secondo la normale uscente dal
volume V.
Il risultato ottenuto stabilisce quindi che la portata entrante il tubo di flusso
in S1 , dove il vettore ~v è opposto al vettore d~s, è uguale alla portata in uscita
sulla superficie S2 . Non è altro che la conservazione della massa del liquido.
Se il tubo di flusso è abbastanza stretto da poter assumere che la velocità del
liquido sia la stessa nei vari punti della superfici d’ingresso ed uscita, allora si ha
J~1 S1 = J~2 S2 −→ ρ~v1 S1 = ρJ~2 S2 −→ ~v1 S1 = J~2 S2
ovvero che, lungo un tubo di flusso (per esempio, lungo una condotta, un fiume
ecc) la velocità media del liquido è inversamente proporzionale alla sezione del
tubo. Questo risultato è noto come Teorema di Leonardo.
2.6
Il teorema di Bernoulli
Il Teorema di Bernoulli
(Daniel Bernoulli (1700−1785), fisico e matematico olandese, figlio del matematico Johann)
Per capire meglio il significato fisico del risultato ottenuto, ripercorriamo la
strada storica che portò Bernoulli a formulare il suo Teorema, prima che Eulero
(allievo del padre) giungesse alle sue equazioni.
52
Suppuniamo di essere in condizioni di moto stazionario, e consideriamo un
generico tubo di flusso infinitesimo, che si appoggia su due superfici dS1 e dS2 ,
ortogonali al tubo stesso, vedi Fig.30.
Figure 30: Il teorema di Bernouilli. La conservazione dell’energia meccanica.
Indichiamo con v1 la velocità del liquido quando attraversa dS1 (ortogonalmente ad essa), con v2 la velocità del liquido quando attraversa dS2 , lasciamo
passare un tempo dt.
Il liquido si muove in un campo di forza esterne. Poiché, per ipotesi, nel liquido
non ci sono forze dissipative (di attrito) interno o viscosità, il lavoro meccanico
fatto dalle forze esterne deve tradursi in una variazione di energia cinetica.
Osservando il sistema nell’intervallo di tempo tra t e t + dt si vede
• entrare da dS1 una massa d’acqua dm = ρ dS1 v1 dt
• uscire da dS2 la stessa massa d’acqua dm = ρdS2 v2 dt
mentre tutto il resto è rimasto invariato (ipotesi di stazionarietà).
Il lavoro delle forze di pressione sul liquido è dato da
dLP = P1 dS1 v1 dt − P2 dS2 v2 dt = ρ−1 dm ( P1 − P2 )
53
Quello dovuto alla forza peso è stato, assumendo di spostarci nel campo gravitazionale terrestre con accelerazione di gravità costante:
dLg = dm g h
Per il teorema dell’energia cinetica la somma di queste due quantità deve
uguagliare la variazione di energia cinetica della massa dm.
Fissato un livello di riferimento arbitrario, possiamo scrivere il dislivello tra
le due superfici come differenza delle due altezze h = h1 − h2. In questo caso
possiamo scrivere:
1
dm(v22 − v12 ) = dm ρ−1 (p1 − p2 ) + dm g (h1 − h2 ))
2
ovvero:
1
1
p1 + ρ g h1 + ρ v12 = p2 + ρ g h2 + ρ v22
2
2
che esprime, appunto, il Teorema di Bernoulli. Esso è quindi niente altro che
l’espressione della conservazione dell’energia meccanica nel moto di un liquido
ideale.
Dividendo l’equazione di conservazione precedente per ρ g, otteniamo un’altra
forma del Teorema di Bernoulli, cioè
(g ρ)−1 p1 + h1 +
1 2
v = costante
2g 1
Dimensionalmente ciascun addendo ha le dimensioni di una lunghezza: la
prima viene chiamata altezza piezometrica, la seconda altezza geometrica e la
terza altezza cinetica : il Teorema di Bernoulli stabilisce che la somma algebrica
di queste tre altezze é costante nel liquido in moto. Si noti che il Teorema di
Bernoulli stabilisce che la costante a cui è pari la somma delle tre altezze sopra
citate è indipendente dalla posizione solo entro il tubo di flusso considerato.
Solamente nel caso in cui il moto sia anche irrotazionale oltrechè stazionario,
allora essa è indipendente dalla posizione nel liquido, come mostrato a partire
dall’equazione di Eulero !
2.7
Il teorema di Torricelli
Il Teorema di Bernoulli implica un risultato che era già noto a Torricelli, relativo
alla velocità di un liquido che fuoriesce da un orifizio praticato in un contenitore
di sezione molto più grande (per esempio dal rubinetto di una botte), vedi Fig.31.
Se l’altezza del liquido nel contenitore è h allora la velocità del liquido che
fuoriesce vale
q
v = 2gh
ovvero è la stessa come se il liquido cadesse direttamente dall’altezza della superficie di separazione liquido-aria.
54
Figure 31: Teorema di torricelli: La velocità di uscita del liquido è uguale a quella
della caduta libera da un’altezza h
Questo risultato è, come dicevamo, una conseguenza della conservazione dell’energia
meccanica che, nei liquidi ideali, abbiamo visto essere descritta dal Teorema di
Bernoulli.
Come abbiamo visto, nel moto irrotazionale di un liquido ideale, in condizioni stazionarie, la somma delle altezze piezometriche, geometriche e cinetiche
è costante.
Osserviamo che al livello del pelo del liquido ed all’uscita dell’orifizio la pressione, e dunque anche l’altezza piezometrica, è la stessa (la pressione coincide in
entrambi i casi con quella atmosferica, che, almeno se h non è troppo grande, è
la stessa).
L’altezza cinetica è praticamente nulla in alto (grande sezione della botte
rispetto a quella del rubinetto), mentre quella geometrica è nulla in basso (prendendo quello del rubinetto come livello di riferimento): per il Teorema di Bernoulli
ne segue che, se h è il dislivello fra il pelo liquido ed il rubinetto, e v la velocità
di uscita, risulta
q
v2
h=
−→ v = 2gh
2g
che, formalmente, è lo stesso risultato che otterremmo nel moto di caduta del
liquido nel campo di gravità della Terra, partendo da fermo, da un’altezza h.
55
2.8
Il Tubo di Venturi
Un’altra applicazione del Teorema di Bernoulli è rappresentata dal cosiddetto
Tubo di Venturi , usato, per esempio, per misurare la portata di una condotta,
vedi Fig.32.
Si tratta di un tubo orizzzontale, che presenta una strozzatura: la differenza
di pressione del liquido nella sezione normale e in qualla strozzata consente, note
le due sezioni, di conoscere la portata della condotta. All’esterno di un aereo, per
esempio, permette di misurare la portata dell’aria e, quindi, la velocità dell’aereo
rispetto all’aria.
Figure 32: L’effetto Venturi: la velocità aumenta e la pressione diminuisce
Ricordiamo che la portata volumica Q nella condotta vale (Teorema di Leonardo)
Q = S1 v1 = S2 v2
D’altronde, dal Teorema di Bernoulli abbiamo che, essendo l’altezza geometrica costante,
v1 2
p2
v2 2
p1
+
=
+
gρ
2g
gρ
2g
1
1 2 S1 2 − S 2 2
2
2
p1 − p2 = ρ(v2 − v1 ) = ρQ
2
2
S1 2 S2 2
56
da cui si ricava che la portata volumetrica è data da
Q = S 1 S2
v
u
u
t
2(p1 − p2 )
ρ(S1 2 − S2 2 )
Un’altra interessante applicazione del tubo di Venturi è quella di usarlo per
estrarre l’aria da recipienti chiusi fino ad avere pressioni dell’ordine di qualche
millesimo di pressione atmosferica. Può essere usato come mostrato in figura
usando semplicemente un flusso d’acqua (per esempio, di rubinetto).
2.9
Il moto di liquidi reali
Un liquido reale può effettivamente considerarsi incomprimibile con ottima approssimazione, ma presenta sempre una certa viscosità o attrito interno. Vediamo di definire, intanto, questa nuova grandezza, cioè la viscosità. Immaginiamo
di avere del liquido compreso fra due lamine, e di traslare una lamina rispetto
all’altra con una velocità fissa v0 ,vedi Fig33.
Figure 33: In una lamina di liquido viscoso, in moto laminare, la forza di attrito
prodotta è proporzionale alla differenza di velocità tra il pelo superiore e quello
inferiore, alla superfice di contatto considerata, ed inversamente proporzionale
allo spessore della lamina. Il coefficiente di proporzionalità è, per definizione, la
viscosità.
In assenza di viscosità non dovrebbe essere necessaria alcuna forza per mantenere la lamina in movimento, invece osserviamo quanto segue:
57
• occorre applicare alla lamina una forza F nella direzione del moto, proporzionale alla superficie della lamina, proporzionale alla sua velocità e
inversamente proporzionale alla distanza fra le lamine
F =
ηSv0
d
La costante di proporzionalità dipende dal liquido e si chiama coefficiente
di viscosità dinamica, le sue dimensioni sono Kg (ms)−1
• Il liquido viene trascinato dalla lamina e la distribuzione di velocità decresce
linearmente dal valore di v0 fino a zero, passando dalla lamina in moto a
quella ferma:
y
v(y) = v0
d
Nel caso in cui la geometria non sia cosı̀ semplice, purché però il moto sia laminare, ovvero purché i vari strati di liquido scorrano uno sull’altro senza mescolarsi, risulta che su una lamina di liquido dS agisce una forza di attrito (forza di
taglio, opposta alla velocità) che dipende dalla derivata della velocità del liquido
nella direzione ortogonale alla superficie stessa),
~ · grad(vi)
dFi = ηdS
Vediamo, partendo da queste premesse, come cambia la legge di Eulero per il
moto di un liquido viscoso. Per questo è necessario conoscere l’espressione della
forza di origine viscosa su un generico elemento di volume dV di liquido.
Consideriamo un volume infinitesimo di lati dx, dy, dz e cominciamo col determinare la componente dFx della forza di origine viscosa che agisce sull’elemento
di liquido considerato.
Consideriamo le due superfici parallele di area dydx la cui normale è diretta
secondo l’asse z (quella di sopra in verso positivo, quella di sotto in verso negativo): il loro contributo vale
dFx−y = −η dxdy ~k · gradvx (z) + η dxdy ~k · gradvx (z + dz) = ηdxdydz∂z ∂z vx
Analogamene per le altre due coppie di superfici:
dFz−y = ηdxdydz∂x ∂x vx
dFx−z = ηdxdydz∂y ∂y vx
Quindi, in definitiva, la componente dFx della forza di origine viscosa che
agisce sull’elemento di liquido considerato vale:
dFx = η dV ∇2 vx = η dV △vx
58
dove dV è il valore del volume considerato dV = dxdydz e ∇2 = △ è l’operatore
scalare laplaciano, definito come
∇2 = ∂x 2 + ∂y 2 + ∂z 2
Questo risultato, ottenuto per la componente dFx agente sul volumetto considerato, si generalizza banalmente alle altre componenti, per cui, in definitiva,
la forza di origine viscosa agente su di esso vale
dF~ = η dV ∇2~v
Questo risultato è indipendente dalla geometria del volume, e consente di
arrivare immediatamente alla nuova forma dell’equazione di Eulero per i liquidi
viscosi (incomprimibili). Ricordiamo a questo proposito la relazione di Eulero (la
legge di Newton per i liquidi):
dF~ − dV gradP = dm~a
che consente di esprimere l’accelerazione del volume di liquido dV in termini della
forza esterna agente su di esso e della forza dovuta alle forze di pressione.
Per i liquidi ideali sottoposti a un campo di forze di massa che ammettono
potenziale, questa equazione diveniva
ρdV ~a = −dV (gradP + ρgradU)
Nel caso reale, in presenza di attrito interno, dobbiamo sommare al secondo
membro anche la forza di origine viscosa, ovvero
ρdV ~a = −dV (gradP + ρgradU − η∇2~v )
dalla quale
~a = −gradU − ρ−1 − ηρ−1 ∇2~v
Come sappiamo l’accelerazione ~a è legata al campo delle velocità euleriano
dalla relazione
~a = (vi ∂i )~v + ∂t~v
per cui abbiamo infine
∂t~v + vi ∂i~v = −∇U − ρ−1 ∇P + ηρ−1 ∇2~v
Questa è l’equazione di Navier-Stokes.
La quantità ηρ−1 = ν è detta coefficiente di viscosità cinematica e si misura
in m2 /s .
L’equazione di Navier-Stokes può essere riscritta usando l’identità
1
(vi ∂i )~v = gradv 2 − ~v × rot~v
2
59
Nel caso di un liquido viscoso in moto irrotazionale, ricordiamo che la densità
del liquido è costante per ipotesi, essa diventa
1
∂t~v = −grad(U + P − gradv 2) + ν∇2~v
2
Nel caso di moto stazionario si ha
grad(U + ρ−1 P + 1/2v~2) = ν∇2~v
Questa relazione esprime ancora la conservazione dell’energia.Il primo membro, per quanto visto a proposito del Teorema di Bernoulli, rappresenta la variazione dell’energia totale per unità di massa associata all’elemento di liquido,
mentre il secondo membro è pari al lavoro fatto dalla forza viscosa.
2.10
Moto di un liquido viscoso in una condotta
Passiamo adesso a considerare il moto di un liquido reale in una condotta orizzontale e di sezione costante.
Se l’energia meccanica si conserva lungo la condotta, il Teorema di Bernoulli ci
dice che la pressione lungo la condotta resta costante. Sperimentalmente troviamo
che essa diminuisce lungo il verso del flusso del liquido, ovvero che la condotta
presenta una perdita di carico.
La perdita di carico è dovuta ad una perdita di energia meccanica dovuta al
lavoro fatto contro forze di attrito sia fra liquido e pareti che fra le varie parti del
liquido.
Data la geometria della condotta che abbiamo scelto, una perdita di energia
lungo il moto del liquido non può tradursi in una perdita di energia cinetica, visto
che l’incompressibilità del liquido e la sezione costante richiedono che la velocità
media (poiché, come vedremo, essa non è la stessa nei vari punti della sezione,
proprio a causa della viscosità) non cambi lungo la condotta; né può tradursi in
una perdita di energia potenziale, poiché l’altezza della condotta, per ipotesi, è
costante; per cui deve necessariamente tradursi in una diminuzione dell’altezza
piezometrica, come, in realtà accade.
Supponiamo che il moto del liquido sia laminare , ovvero che la velocità del
liquido su una qualsiasi sezione del flusso sia, in ogni punto, parallela ad una
direzione fissa. Questa condizione garantisce che i vari strati di liquido scorrano
uno sull’altro senza mescolarsi tra loro attraverso movimenti turbolenti.
In queste condizioni si osserva che, a sezione S e lunghezza L della condotta
fissate, la perdita di carico ∆P dipende linearmente dalla portata Q secondo la
relazione ∆P = RQ, dove R rappresenta la resistenza offerta dalla condotta al
passaggio del liquido.
Valutiamo la potenza meccanica dissipata in una condotta di sezione costante,
a causa della viscosità. Calcoliamo il lavoro fatto nel tempo dt contro le forze di
60
pressione per immettere una massa dm = ρSvdt = ρQdt nella condotta, esso vale
dLin = Pin Sv dt = Pin Q dt
mentre il lavoro che ne ricaviamo all’uscita dalla condotta, dove la pressione
è minore, vale soltanto
dLout = Pout Qdt
ovvero c’è una perdita di energia meccanica nel tempo dt pari a
dLout − dLin = (Pout − Pin )Qdt
si ha quindi una dissipazione di potenza meccanica pari al lavoro delle forze di
dissipazione W = RQ2 .
2.11
Equilibrio di un liquido in rotazione uniforme
Consideriamo un recipiente contenente un liquido, ed ammettiamo che il recipiente sia in rotazione con velocità angolare costante ω intorno ad un asse verticale
z.
E’ un fatto che, dopo un pò di tempo, appunto perché il liquido non è ideale
ed ha attrito interno, anche il liquido si mette in rotazione con la stessa velocità
angolare del contenitore, vedi Fig.34.
Se ci poniamo nel riferimento rotante rigido con il contenitore, in esso, oltre
alla solita forza peso, compare un campo di forze centrifugo (ovvero diretto in
verso opposto all’asse z), che cresce proporzionalmente alla distanza dall’asse e
che è proporzionale alla massa su cui la forza agisce.
Essendo la forza radiale, questo campo di forze ammette un potenziale Uc (x, y, z)
dato da
Uc (x, y, z) = −1/2ω 2 (x2 + y 2)
A questo potenziale si deve aggiungere il consueto potenziale gravitazionale gz.
Ne segue che, nel riferimento rotante, il potenziale complessivo per unità di
massa) vale
U(x, y, z) = gz − 1/2ω 2(x2 + y 2)
In questo sistema di riferimento il liquido, naturalmente, è a riposo, per cui
possiamo applicare le conclusioni a cui siamo giunti circa la statica di un liquido
in un campo di forze che ammette potenziale, secondo le quali la superficie libera
del liquido (isobara) è una superficie equipotenziale.
L’equazione della superficie libera sarà dunque la seguente
gz − 1/2ω 2(x2 + y 2 ) = cost −→ z − z0 =
ω2 2
v2
(x + y 2 ) =
2g
2g
la quale è l’equazione di un paraboloide di rotazione intorno all’asse z, avente
la concavità rivolta verso l’alto.
61
Figure 34: In un recipiente in rotazione uniforme il pelo dell’acqua ha una forma
parabolica
Immaginiamo che il secchio abbia un diametro di 30cm e che ruoti a 1giro/secondo
(quasi come in un vecchio giradischi): di quanto è pi alto il livello al bordo rispetto
al centro del secchio?
Da quanto sopra, segue che, detto R il raggio del secchio,
z − z0 =
ω2 2
R
2g
si ha che con ω = 2πrad/s = 6.28rad/s, g = 9.81m/s, R = 15cm
z − z0 =
2.12
6.282
0.0225 = 0.045m = 4.5cm
19.62
Effetti della rotazione terrestre sulla superficie degli
oceani
Un altro caso di equilibrio di un liquido in rotazione, interessante da studiare, è
quello degli oceani sulla Terra stessa.
Come sappiamo, la superficie della Terra è per la maggior parte coperta di
acqua. Supponiamo che la superficie del mare sia una superficie isobarica a livello
62
mondiale (vero solo in media ...), e che la densità dell’acqua sia costante ovunque
(salinità costante). Ne segue che sulla superficie del mare il potenziale per unità
di massa, determinato dalla gravità e dal campo centrifugo dovuto alla rotazione
diurna della Terra sul suo asse, deve avere un valore costante, ovvero la superficie
del mare deve essere una equipotenziale.
Circa la gravità, assumeremo anche, in prima approssimazione, che sia lecito
trattare il problema come se tutta la massa della Terra fosse concentrata nel suo
centro. Come sappiamo questo è rigorosamente vero solo se la distribuzione di
massa della Terra ha simmetria sferica.
Chiamando allora ω la velocità angolare della Terra sul suo asse (vedi Fig.
35)
Figure 35: Deformazione della superficie oceanica causata della rotazione terrestre
ω=
2π
2π
=
rad/s ≈ 7.272 10−5rad/s
T
86400
indicando con G la costante di gravitazione universale
(G = (6.673 ± 0.01)10−11m3 Kg −1 s−2 )
63
ed indicando con M la massa dell’intera Terra, in coordinate sferiche abbiamo
che la superficie oceanica deve verificare l’equazione
−
GM
1
− ω 2R2 sin2 (θ) = cost
R
2
L’equazione implicita
R = R(θ, φ)
che deriva dalla condizione precedente è l’equazione della superficie dell’oceano.
Si osservi che, se la rotazione non ci fosse, l’ equazione fornirebbe R = cost
ovvero definirebbe una superficie sferica (com’ è ovvio !).
Nel caso sia presente la rotazione invece, allo scopo di esplicitare l’equazione
precedente per la superficie oceanica, cominciamo con il definire la quantità R0 ≈
6400Km come la distanza tra tale superficie al polo (cioè per θ = 0 ) ed il centro
della Terra.
Dall’equazione precedente si ha allora
−
1
GM
GM
− ω 2 R2 sin2 (θ) = cost = −
R
2
R0
Osserviamo adesso che, nelle stesse approssimazioni, l’accelerazione di gravità
sulla superficie terrestre vale g = GM
, per cui risulta
R2
0
GM
= gR0 = 9.81 × 6.4 × 106 = 6.28 × 107 (m/s)2
R0
mentre risulta invece
1 2 2
ω R0 = 1.08 × 105(m/s)2
2
E’ dunque chiaro che possiamo trattare il termine centrifugo come una perturbazione (piccola) a quello gravitazionale. Introduciamo per questo la quantità
δR = R − R0
δR
e sviluppiamo al primo ordine in R
l’ equazione della superficie equipoten0
ziale. Essendo
1
1
1
δR
=
− 2
δR ≈
R0 + δR
R0
R0
R0 (1 + R )
e confondendo R con R0 (considerandoli uguali) nel termine 12 ω 2R2 sin2 (θ), risulta
−
GM
δRGM
1
GM
+
− ω 2 R02 sin2 (θ) = −
2
R0
R0
2
R0
64
da cui si ottiene
1
δRg − ω 2 R02 sin2 (θ) = 0
2
ovvero
δR
1
= ω 2R0 sin2 (θ) = Ksin2 (θ)
R0
2g
dove abbiamo posto
K=
1 2
ω R0 ≈ 1.725 × 10−3
2g
Il fatto che K ≪ 1 conferma la liceità di fermarsi al primo ordine nello sviluppo
di 1/(R + δR).
Da quanto abbiamo detto, segue quindi che
R(θ, φ) = R0 (1 + Ksin2 (θ))
Questa, a meno di termini in K 2 , è la superficie di un ellissoide di rotazione
intorno all’asse z, avente semiasse minore pari a R0 (distanza del polo dal centro)
e semiasse maggiore pari a R0 (1 + K), ovvero avente ellitticità K.
Ricordiamo infatti che l’equazione di un siffatto ellissoide ha la forma seguente:
y2
x2
z2
+
+
=1
R02 (R0 (1 + K))2 (R0 (1 + K))2
ovvero, in coordinate polari
(
R 2 2
R
) cos (θ) + (
)2 sin2 (θ) = 1
R0
R0 (1 + K)
R2 cos2 (θ) +
R2 + R2 (
R2
sin2 (θ) = R02
(1 + K)2
1
− 1)sin2 (θ) = R02
(1 + K)2
Al primo ordine perturbativo si ha
1
≈ (1 − K)2 ≈ 1 − 2K
(1 + K)2
Quindi possiamo scrivere
65
R2 − 2KR2 sin2 (θ) ≈ R02 −→ R2 (1 − 2Ksin2 (θ)) ≈ R02
R2 ≈ R02 (1 + 2Ksin2 (θ)) −→ R ≈ R0 (1 + Ksin2 (θ))
1
L’ ellitticità K cosı̀ trovata è circa la metà di quella reale ( 298.3
= 3.3610−3 ).
Una ragione sta nel fatto che la forma della Terra ad ellissoide modifica a
sua volta il potenziale gravitazionale (questa correzione la farebbe crescere di un
fattore 5/2, ovvero otterremmo un valore 1.25 volte più alto del vero...).
Un altro motivo è che la distribuzione della massa nella Terra non è radialmente isotropa, bensı̀ la parte più densa si trova all’interno (questo rende la realtà
più simile al caso da noi studiato, ovvero tende a riabbassare il valore di K). Invece l’effetto della nostra approssimazione sul raggio della Terra (6357 Km invece
di 6400 Km) trascurabile: perch ? provate a rispondere voi.........
66
2.13
Legge di Poiseuille
Vediamo adesso di legare la resistenza R al coefficiente di viscosità introdotto
prima ed ai parametri geometrici della condotta.
Immaginiamo, per semplicità, che si tratti di una condotta a sezione circolare,
per avere un sistema a simmetria cilindrica, e che il moto sia laminare.
Essendo il sistema a simmetria cilindrica ci aspettiamo che la velocità sia una
funzione di r e sia massima al centro della condotta.
Consideriamo la lamina di liquido di lunghezza L compresa nella corona cilindrica di raggi r ed r + dr, vedi Fig.36. La superficie esterna della corona subisce,
Figure 36: Legge di Poiseuille.Moto di un liquido viscoso in una condotta.
a causa dell’attrito con il liquido esterno che si muove più lentamente, una forza
diretta nel verso opposto al moto ( dv(r)
è negativa perché la velocità decresce
dr
con r), la cui componente è pari a
dv
(r + dr)
dr
La superficie interna, a sua volta, è spinta nella direzione del moto dalla forza
dv
−F (r) = −ηS(r) (r)
dr
F (r + dr) = ηS(r + dr)
67
Occorre tenere presente che nel verso del moto è presente anche la forza che
si origina dalla differenza di pressione fra i due estremi della lamina, data da
∆P 2πrdr
Siccome il liquido non accelera, la somma di queste forze deve essere nulla,
per cui
F( r + dr) − F( r) + ∆P 2πrdr = 0
da cui otteniamo
dF
= −∆P 2πr
dr
d’altronde
dF
dS dv
d2 v
= η(
+S 2 )
dr
dr dr
dr
per cui otteniamo
dS dv
d2 v
+ S 2 ) = −∆P 2πr
dr dr
dr
Essendo l’area interna della corona circolare al raggio r data da
η(
S(r) = 2πrL
si ottiene
d2 v
dv
+ 2πrL 2 ) = −∆P 2πr
dr
dr
ovvero, dividendo per 2πηrL e ponendo A = ∆P
(per quanto detto questa
L
grandezza è indipendente la L e rappresenta appunto la perdita di carico), otteniamo
1 dv d2 v
A
+ 2 =−
r dr dr
η
η(2πL
la cui soluzione che soddisfa la condizione al contorno v(r0 ) = 0 è
v(r) =
A(r0 2 − r 2 )
4η
Dunque il profilo della velocità nel tubo è parabolico, con valor massimo
Ar0 2
v(0) =
4η
Possiamo utilizzare adesso questo profilo di velocità per calcolare la portata
del tubo. Occorre integrare da r = 0 ad r = r0 la seguente funzione
Q=
Z
2πA Z
2πrdrv(r) =
rdr(r02 − r 2 )
4η
68
d’altronde l’integrale vale
Z
rdr(r02 − r 2 ) =
per cui abbiamo
Q=
r04
4
2πAr04
π∆P r04
=
16η
8ηL
Questo risultato è noto come legge di Poiseuille. Essa stabilisce che in condizioni di moto laminare, la portata di un tubo è direttamente proporzionale alla
differenza di pressione fra gli estremi del tubo, alla quarta potenza del raggio ed
inversamente proporzionale alla lunghezza del tubo ed al coefficiente di viscosità
Q=
πr 4 ∆P
8ηL
da cui segue che la resistenza opposta dalla condotta al moto del liquido vale
R=
8ηL
πr 4
69