UNIVERSITA’ DI FIRENZE
DIPARTIMENTO DI ENERGETICA S. STECCO
SEZIONE DI MECCANICA APPLICATA
DISPENSE DI MECCANICA APPLICATA:
RICHIAMI DI DINAMICA
E MACCHINE ALTERNATIVE
Prof. Ing. P. Toni, Ing. R. Giusti, Ing. E. Meli, Ing. S. Papini,
Ing. L. Pugi, Ing. A. Rindi
1
Indice
INDICE ................................................................................................................... 2
1
INTRODUZIONE .......................................................................................... 4
2
RICHIAMI DI DINAMICA NEWTONIANA ..................................................... 5
2.1
SISTEMA COMPOSTO DA UN SINGOLO CORPO RIGIDO ......................................... 5
2.1.1 Punto fisso (precessione) ............................................................................... 7
2.1.2 Asse fisso (rotazione) ..................................................................................... 8
2.2
. SISTEMA COMPOSTO DA N CORPI RIGIDI .......................................................... 9
3
RICHIAMI DI DINAMICA LAGRANGIANA ................................................. 13
3.1
EQUAZIONI DI LAGRANGE (FORMULAZIONE RIDONDANTE) ............................. 13
3.2
EQUAZIONI DI MOTO (FORMULAZIONE RIDONDANTE) ..................................... 17
3.3
EQUAZIONI DI LAGRANGE (FORMULAZIONE NON RIDONDANTE) ..................... 18
3.4
EQUAZIONI DI MOTO (FORMULAZIONE NON RIDONDANTE) .............................. 20
3.5
SISTEMA CON UN GRADO DI LIBERTÀ (FORMULAZIONE NON RIDONDANTE) ..... 21
4
DETERMINAZIONE DELLE EQUAZIONI DI MOTO DI UN MECCANISMO .. 23
4.1
ESEMPIO DI CASO NON PIANO .......................................................................... 23
4.1.1 Soluzione newtoniana .................................................................................. 24
4.1.2 Soluzione lagrangiana (formulazione ridondante) ...................................... 26
4.1.3 Soluzione lagrangiana (formulazione non ridondante) ............................... 28
4.2
ESEMPIO DI CASO PIANO .................................................................................. 29
4.2.1
4.2.2
4.2.3
5
Soluzione newtoniana .................................................................................. 30
Soluzione lagrangiana (formulazione ridondante) ...................................... 33
Soluzione lagrangiana (formulazione non ridondante) ............................... 35
MACCHINE ALTERNATIVE MONOCILINDRICHE ..................................... 37
5.1
MASSE DI SOSTITUZIONE ................................................................................. 37
2
5.2
MANOVELLISMO DI SPINTA ............................................................................. 39
5.2.1
5.2.2
5.2.3
5.2.4
6
7
Manovellismo di spinta: cinematica ............................................................ 39
Manovellismo di spinta: masse di sostituzione per la biella ....................... 41
Manovellismo di spinta: dinamica ............................................................... 42
Manovellismo di spinta: bilanciamento ....................................................... 43
MACCHINE ALTERNATIVE PLURICILINDRICHE ......................................48
6.1
MACCHINE ALTERNATIVE PLURICILINDRICHE: BILANCIAMENTO ..................... 48
6.2
MACCHINE ALTERNATIVE PLURICILINDRICHE: MOTORE A 2 CILINDRI (2 TEMPI)52
6.3
MACCHINE ALTERNATIVE PLURICILINDRICHE: MOTORE A 2 CILINDRI (4 TEMPI)53
6.4
MACCHINE ALTERNATIVE PLURICILINDRICHE: MOTORE A 3 CILINDRI (2 TEMPI)54
6.5
MACCHINE ALTERNATIVE PLURICILINDRICHE: MOTORE A 3 CILINDRI (4 TEMPI)55
6.6
MACCHINE ALTERNATIVE PLURICILINDRICHE: MOTORE A 4 CILINDRI (2 TEMPI)56
6.7
MACCHINE ALTERNATIVE PLURICILINDRICHE: MOTORE A 4 CILINDRI (4 TEMPI)57
6.8
MACCHINE ALTERNATIVE PLURICILINDRICHE: MOTORE A 6 CILINDRI (4 TEMPI)58
6.9
MACCHINE ALTERNATIVE PLURICILINDRICHE: MOTORE A 8 CILINDRI (4 TEMPI)59
BIBLIOGRAFIA ..........................................................................................60
3
1 Introduzione
Nella presente trattazione verranno dapprima richiamati alcuni concetti
fondamentali di dinamica sia nella sua formulazione newtoniana che in quella
lagrangiana. In proposito saranno anche proposti, a titolo di esempio, alcuni semplici
esercizi per illustrare l’applicazione dei concetti in questione.
Successivamente verrà analizzata nel dettaglio la dinamica delle macchine
alternative monocilindriche con particolare riguardo al bilanciamento di queste ultime.
Infine i concetti validi per le macchine monocilindriche saranno estesi anche alle
macchine alternative pluricilindriche, sempre focalizzando l’attenzione sul loro
bilanciamento.
4
2 Richiami di dinamica
newtoniana
L’approccio newtoniano alla studio della dinamica dei sistemi meccanici è
concettualmente più generale e più potente dell’analogo approccio lagrangiano soprattutto
se si considerano le ipotesi fisiche alla basa della teoria in questione. Tuttavia esso risulta
molto meno sistematico ed automatizzabile rispetto all’approccio lagrangiano; inoltre
l’approccio newtoniano si rivela anche decisamente meno efficiente di quello lagrangiano
per sistemi di grandi dimensioni. L’approccio lagrangiano risulta infine facilmente
estendibile anche al di fuori dell’ambito della meccanica.
Nel seguito sarà dapprima studiato il moto di un sistema composto da un singolo
corpo rigido. Successivamente i concetti appena introdotti verranno estesi ad un sistema
formato da un numero generico di corpi rigidi (sistema multibody).
2.1 Sistema composto da un singolo corpo rigido
Come è noto, le equazioni cardinali della dinamica applicate al singolo corpo
rigido (si veda la Fig. 2.1) assumono la forma
̇
̇
̈
(
∑
∑
)
(
∑
̇
∑
̇
∑
(2.1)
∑
)
(2.2)
(2.3)
nelle quali sono state impiegate la seguenti convenzioni
-
la terna di centro
è fissa mentre la terna di centro
è solidale al corpo
rigido
5
-
[
e
]
rappresentano la posizione del centro di massa e
l’orientazione del corpo (descritta ad esempio mediante gli angoli di Eulero
̇ dove
ZXY); si ricordi che
[
-
]
(2.4)
( ) è la matrice di rotazione che lega la terna fissa alla terna solidale al
corpo ovvero
( )
[
-
e
][
][
]
(2.5)
sono la quantità di moto ed il momento angolare del corpo in questione
(come centro di riduzione è stato scelto per semplicità il centro di massa
; analogamente, senza alterare la forma delle equazioni, poteva essere
scelto pure un generico punto fisso
-
e
anche non appartenente al corpo)
sono la massa ed il tensore di inerzia del corpo (calcolato rispetto alla
terna di centro
solidale al corpo; analogamente
sarà il tensore di
inerzia calcolato rispetto alla terna solidale al corpo avente centro nel punto
fisso
-
)
sono i vincoli cinematici agenti sul corpo considerato (
grado di vincolo
dove il
rappresenta il numero di gradi di libertà tolti dal vincolo);
l’approccio newtoniano non richiede a priori ipotesi particolari sulla struttura
dei vincoli (nel caso in esame si suppone solamente che siano bilateri,
sufficientemente regolari ed indipendenti)
-
le forze
ed i corrispondenti momenti
(rispetto a
) sono
rispettivamente le azioni esterne e le azioni dovute ad elementi di forza (molle,
smorzatori, ecc.) e sono funzioni note di
,
(rispetto a
̇
̇ e del tempo ; al contrario
) rappresentano le reazioni vincolari e sono a priori
incognite.
6
Figura 2.1 Singolo corpo rigido
∑
In questo caso il sistema (2.1)-(2.3) è costituito da
∑
equazioni in
incognite mentre i gradi di libertà associati al corpo risultano essere
∑
.
(2.6)
Spesso inoltre, in accordo con il Principio di D’Alembert, si introducono nelle
(2.1)-(2.2) le azioni di inerzia definite come
̇
̇
̈
(
(2.7)
);
(2.8)
di conseguenza si può dunque scrivere
∑
∑
∑
∑
∑
(2.9)
∑
.
(2.10)
E’ utile infine ricordare l’espressione dell’energia cinetica associata al corpo
rigido considerato ovvero
̇
̇
.
(2.11)
2.1.1 Punto fisso (precessione)
Nel caso in esame un punto
del corpo è fisso. Se si assume
il
sistema (2.1)-(2.3) diventa
7
̇
̇
̈
∑
∑
(
(2.12)
∑
)
∑
(2.13)
.
Per quanto riguarda il moto di precessione (
(2.14) è costituito da
equazioni in
(2.14)
,
) il sistema (2.12)-
incognite mentre i gradi di libertà associati
al corpo si riducono a
;
Infatti, essendo
(dove
nel sistema solidale) e
incognite
̇
(2.15)
è la posizione del centro di massa
, la (2.13) è di per sé sufficiente a determinare le
e di conseguenza ; la (2.12) fornisce poi il valore della reazione
.
Si noti inoltre che, usando come incognita la velocità angolare espressa nel
, ricordando che ̇
sistema solidale al corpo
momenti
e non considerando i
, la (2.13) si riduce all’equazione di Eulero
e
̇
.
(2.16)
2.1.2 Asse fisso (rotazione)
In questo caso il corpo ruota attorno ad un asse fisso individuato da un punto
da un versore
(da cui
). Se si assume
(da cui
̇
),
e
e
il sistema (2.1)-(2.3) diventa
̇
̇
̈
(
∑
)
∑
(2.17)
∑
∑
(2.18)
(2.19)
Per quanto concerne il moto di rotazione (
è costituito da
equazioni in
,
) il sistema (2.17)-(2.19)
incognite mentre i gradi di libertà associati al
corpo si riducono a
.
(2.20)
Poiché, anche per quanto riguarda la rotazione attorno ad un asse fisso si ha
(dove
̇
è la posizione del centro di massa nel sistema solidale) e
, la terza componente della (2.18) è sufficiente a determinare l’incognita
e di
conseguenza ; la (2.17) e le prime due componenti della (2.18) forniscono poi il valore
delle reazioni
,
.
8
In particolare le equazioni (2.17)-(2.18) scritte per esteso diventano
̇
(
̇
(∑
∑
̇ )
̈
(
e
(∑
(
)
(2.21)
(
)
(2.22)
)
∑
(∑
∑
̇ )
̈
dove
∑
)
∑
̇
̈
∑
∑
̇
∑
)
(∑
rappresenta la distanza di
)
dall’asse di rotazione del corpo.
2.2 . Sistema composto da N corpi rigidi
Se il sistema in questione è composto da
corpi rigidi (si veda la Fig. 2.2), le
equazioni cardinali della dinamica assumono la forma
̇
̈
∑
∑
̇
∑
∑
(
)
.
(2.23)
∑
∑
̇
(
∑
∑
∑
∑
∑
∑
∑
.
∑
(2.24)
̇
̇
̇
)
(2.25)
̇
(
̇
̇
̇
)
(2.26)
nelle quali sono state impiegate la seguenti convenzioni
-
la terna di centro
è fissa mentre la terna di centro
è solidale al corpo
rigido
-
e
[
]
rappresentano la posizione del centro di massa e
l’orientazione del corpo (descritta ad esempio mediante gli angoli di Eulero
ZXY); si ricordi che
̇ (vedi paragrafo 2.1)
9
(
-
) è la matrice di rotazione che lega la terna fissa alla terna solidale al
corpo
-
̇ e
(vedi paragrafo 2.1)
̇
sono la quantità di moto ed il momento angolare del corpo in
questione (come centro di riduzione è stato scelto per semplicità il centro di
massa
; analogamente, senza alterare la forma delle equazioni, poteva
essere scelto pure un generico punto fisso
anche non appartenente al
corpo)
-
e
sono la massa ed il tensore di inerzia del corpo (calcolato rispetto alla
terna di centro
solidale al corpo)
è l’
-
vincolo cinematico agente tra l’ambiente ed il corpo
mentre
è l’
ed il corpo
vincolo cinematico agente tra il corpo
vincolo
,
(
e
dove i gradi di
rappresentano il numero di gradi di libertà tolti dal vincolo);
nel caso in esame si suppone sempre che i vincoli siano bilateri,
sufficientemente regolari ed indipendenti)
-
l’
azione esterna
agente sul
azioni dovute ad elementi di forza
corpo, le
,
(provocate rispettivamente
dall’interazione con l’ambiente e con il
corpo) agenti sul
corpo ed i corrispondenti momenti
sono funzioni note di
al contrario le reazioni vincolari
̇
(rispetto a
̇
,
̇
,
,
̇
)
e del tempo ;
(rispetto a ) sono a
priori incognite.
10
Figura 2.2 N corpi rigidi
Nel caso di
∑
∑
∑
∑
corpi rigidi il sistema costituito dalle (2.23)-(2.26) è costituito da
∑
∑
∑
∑
equazioni
∑
in
∑
incognite mentre i gradi di libertà associati al sistema stesso
risultano essere
∑
∑
∑
∑
∑
.
(2.27)
Come per il singolo corpo rigido, in accordo con il Principio di D’Alembert, si
introducono nelle (2.23)-(2.26) le azioni di inerzia definite come
̇
̇
̈
(2.28)
(
);
(2.29)
di conseguenza si può ancora scrivere
∑
∑
∑
∑
.
11
∑
∑
∑
∑
∑
(2.30)
∑
∑
∑
∑
.
∑
(2.31)
L’energia cinetica associata all’intero sistema di
corpi rigidi considerato assume
infine la forma
∑
∑
(
̇
̇
).
(2.32)
12
3 Richiami di dinamica
lagrangiana
L’approccio lagrangiano alla studio della dinamica dei sistemi meccanici può
risultare meno generale e meno potente dell’analogo approccio newtoniano soprattutto se
si considerano le ipotesi fisiche alla basa della teoria in questione. Tuttavia esso risulta
molto più sistematico ed automatizzabile rispetto all’approccio newtoniano; inoltre
l’approccio newtoniano si rivela anche decisamente meno efficiente di quello lagrangiano
per sistemi di grandi dimensioni. L’approccio lagrangiano risulta infine facilmente
estendibile anche al di fuori dell’ambito della meccanica.
Nel seguito sarà dapprima studiato il moto di un generico sistema composto da un
numero qualsiasi di corpi rigidi (sistema multibody); a tale scopo sarà presentata una
versione delle equazioni di Lagrange particolarmente adatta per trattare sistemi vincolati
(basata cioè su un insieme ridondante di coordinate lagrangiane e su una funzione
Lagrangiana generalizzata grazie all’introduzione dei moltiplicatori di Lagrange).
Successivamente, come termine di confronto, verrà poi analizzato anche
l’approccio lagrangiano classico basato su un insieme non ridondante di coordinate
lagrangiane.
3.1 Equazioni di Lagrange (formulazione
ridondante)
Per descrivere lo stato del sistema si introduce il seguente insieme di coordinate
lagrangiane ridondanti
(
)
,
(
)
.
(3.1)
13
Per quanto riguarda invece i vincoli, si suppone sempre che essi siano bilateri,
sufficientemente regolari ed indipendenti; si soppone inoltre che i vincoli del sistema
siano anche fissi (scleronomi), lisci ed olonomi. Di conseguenza le equazioni (2.25)(2.26) diventano
(
)
(3.2)
(
)
(3.3)
dove
e
; analogamente in forma più compatta si ha
(3.4)
con
∑
e
sono
∑
∑
∑
∑
(i gradi di libertà del sistema
).
Fatte queste premesse le equazioni di Lagrange per il sistema di corpi rigidi in
questione possono essere scritte come segue
(
̇
)
(
)
(3.5)
nella quale sono state impiegate la seguenti convenzioni:
-
è la funzione lagrangiana generalizzata valutabile come
̇
̇
(3.6)
è l’energia cinetica del sistema,
dove
l’energia potenziale e
i
moltiplicatori di Lagrange (incogniti).
-
sono le forze lagrangiane (indicheremo poi con
lagrangiane associate al singolo corpo e di conseguenza
L’energia cinetica
le forze
(
) ).
può essere calcolata considerando i contributi relativi a
ciascun corpo ovvero
̇
∑
dove la matrice
̇
∑
̇
̇
̇
̇
∑
̇ [
] ̇ (3.7)
è diagonale a blocchi
14
.
(3.8)
Nel prosieguo della trattazione indicheremo per semplicità con
(3.9)
le azioni attive conservative agenti sul sistema (sia esterne che dovute ad elementi di
forza e causate sia dall’interazione con l’ambiente che da quella con altri corpi ) e con
(3.10)
le analoghe azioni attive non conservative. Analogamente chiamiamo
(3.11)
le generiche reazioni vincolari conservative agenti sul sistema (incognite e causate sia
dall’interazione con l’ambiente che da quella con altri corpi); si noti che, essendo i vincoli
lisci, non si hanno reazioni vincolari non conservative.
Le reazioni vincolari (3.11) contengono solamente
parametri incogniti e, come
vedremo, possono essere calcolate a partire dai moltiplicatori di Lagrange; la conoscenza
di
permette dunque di determinare le reazioni vincolari
Definiamo con
dell’
vettore
la parte del vettore
corpo (avente grado di vincolo
.
associata al
vincolo
); in questo caso per semplicità il
sarà riferito sia ai vincoli associati alle reazioni
associati alle reazioni
. Sia poi
che a quelli
il minore di
relativo al
vincolo in questione; le relative azioni lagrangiane possono essere calcolate come
.
Definiamo quindi una terna
(solidale alla terna del corpo stesso
) ed orientazione
associata al vincolo in questione
) avente origine in
(sempre rispetto a
vincolari agenti sul corpo in questione
(3.12)
(scritta in terna
). Il lavoro virtuale delle reazioni
(espresse nel sistema di riferimento
15
inerziale
e già ridotte al centro della terna del giunto
) può essere valutato
come
(3.13)
dove
[
],
,
.
(3.14)
Allo stesso tempo si ha
(3.15)
nella quale
(3.16)
(
)
(
)
.
(3.17)
Dalle (3.13), (3.15) si deduce quindi
(3.18)
(
)
(3.19)
da cui
(
)
(
)
.
(3.20)
Se si è interessati alle reazioni vincolari scritte nei sistemi associati ai giunti, si avrà in
fine
,
(3.21)
.
(3.22)
La conoscenza delle azioni attive conservative (3.9) permette inoltre di calcolare
l’energia potenziale del sistema sommando tra loro i contributi associati ai vari corpi:
∑
∑
∑
∑
∑
∑
∑
(3.23)
La conoscenza delle azioni attive non conservative (3.10) consente infine di
valutare le forze lagrangiane
; a tale scopo si sfrutta il Principio dei Lavori Virtuali
ovvero
∑
16
∑
∑
[(∑
∑
∑
(∑
∑
∑
[(∑
∑
∑
∑
(∑
∑
)
∑
)
∑
]
∑
∑
)
)
].
(3.24)
Essendo poi
∑
(
),
(3.25)
si ottiene
∑
∑
∑
∑
(3.26)
∑
(∑
(
∑
∑
)
)
3.2 Equazioni di moto (formulazione ridondante)
In base a quanto detto nel paragrafo 3.1 siamo adesso in grado di scrivere per
esteso le equazioni di moto del sistema. Ricordando le (3.5)-(3.7) si ha
[ (
[(
̇
) ]
[
∑
) ]
∑
̈ ]
∑
̇
∑
̇
̇
[(
̇
) ]
(3.27)
[(
)
]
[
]
(3.28)
] .
(3.29)
e quindi
[
̈ ]
∑
∑
̇
̇
[(
) ]
[(
)
dove
.
(3.30)
Il secondo termine al primo membro della (3.29) può essere anche scritto come
∑
nella quale la matrice
∑
̇
̇
[
̇
̇ ]
(3.31)
è definita in modo non univoco come
17
∑
∑
̇
∑
̇
̇
.
(3.32)
Riscrivendo la (3.29) in termini vettoriali si ottiene infine
̈
dove
̇ ̇
( )
(
)
(3.33)
.
La (3.4) e la (3.33) costituiscono un sistema di equazioni algebrico – differenziali
di
equazioni in
incognite. Spesso nei sistemi meccanici si usa derivare
due volte la (3.4) rispetto al tempo ottenendo
̇
[
̇]
(3.34)
̇
̈
(3.35)
da cui
̈
[
̇]
̇
.
(3.36)
Raggruppando la (3.33) e la (3.36) in un’unica equazione si ha quindi
(
)
[
̈
( )
̇
(
( )
).
(3.37)
]
3.3 Equazioni di Lagrange (formulazione non
ridondante)
Per lo studio di certi sistemi può essere utile riferirsi ad un sistema di coordinate
lagrangiane non ridondante
(
,
(
In questo caso i vincoli
)
)
.
,
(3.38)
(per i quali valgono le stesse ipotesi del paragrafo 3.1)
non compaiono esplicitamente nella formulazione del problema e si ha
.
(3.39)
Fatte queste premesse le equazioni di Lagrange per il sistema di corpi rigidi in
questione possono essere scritte come segue
18
( ̇)
( )
(3.40)
nella quale sono state impiegate la seguenti convenzioni:
-
è la funzione lagrangiana valutabile come
̇
dove
-
̇
(3.41)
è l’energia cinetica del sistema e
l’energia potenziale
sono le forze lagrangiane.
L’energia cinetica
può essere calcolata considerando i contributi relativi a
ciascun corpo ovvero
̇
∑
̇
(
∑
dove
̇
̇
(
̇
̇
)
̇
∑ (
̇
) [
,
)
̇
](
(
̇
̇
)
̇
̇
)
(3.42)
e
̇
̇,
̇
̇.
(3.43)
Ricordando le definizioni stabilite nelle (3.9)-(3.11), si ha che la conoscenza delle
azioni attive conservative (3.9) permette di calcolare l’energia potenziale del sistema
sommando tra loro i contributi associati ai vari corpi:
∑
∑
∑
∑
∑
∑
∑
(3.44)
mentre le reazioni vincolari (3.11) non compaiono esplicitamente nelle equazioni di
Lagrange.
La conoscenza delle azioni attive non conservative (3.10) consente infine di
valutare nuovamente le forze lagrangiane ; a tale scopo si sfrutta sempre il Principio dei
Lavori Virtuali ovvero
∑
19
∑
∑
[(∑
∑
(∑
∑
∑
∑
∑
∑
∑
(∑
)
)
∑
∑
[(∑
∑
∑
∑
[(∑
(∑
∑
∑
∑
∑
)
)
∑
(
∑
∑
]
)
]
) ∑
∑
)
].
(3.45)
Essendo poi
∑
(3.46)
si ottiene
∑
∑
[(
)
[(
∑
) (∑
∑
∑
(∑
∑
∑
∑
)]
)]
.
(3.47)
Si noti infine come, per determinare le reazioni vincolari (3.11), sia necessario,
dopo avere risolto le equazioni di Lagrange (3.40), impiegare le equazioni di Newton
(2.30)-(2.31) o le equazioni di Lagrange generalizzate (3.37) nelle quali a questo punto la
̇
cinematica del problema (
̇
e
) è del tutto nota.
3.4 Equazioni di moto (formulazione non ridondante)
In base a quanto detto nel paragrafo 3.4 siamo adesso in grado di scrivere per
esteso le equazioni di moto del sistema. Ricordando le (3.40)-(3.43) si ha
[ (
[(
̇
) ]
) ]
[
̈]
∑
∑
∑
∑
̇ ̇
̇ ̇
[( ) ]
(3.48)
(3.49)
e quindi
20
[
∑
̈]
∑
̇ ̇
[( ) ]
.
(3.50)
dove
.
(3.51)
Il secondo termine al primo membro della (3.50) può essere anche scritto come
∑
nella quale la matrice
∑
̇ ̇
[
̇ ̇]
(3.52)
è definita in modo non univoco come
∑
∑
̇
∑
̇ ̇
.
(3.53)
Riscrivendo la (3.50) in termini vettoriali si ottiene infine
̈
̇ ̇
dove la (3.54) rappresenta un sistema di
( )
.
(3.54)
equazioni differenziali in
incognite.
3.5 Sistema con un grado di libertà (formulazione
non ridondante)
Se il sistema ammette un solo grado di libertà (supponiamo per semplicità
) le
equazioni di moto (3.54) diventano
̈
̇
̇
(3.55)
nella quale valgono le seguenti relazioni:
-
per l’energia cinetica
̇
̇
∑
dove
̇
(
̇
∑
](
̇
̇
)
)
(3.56)
e
̇
̇,
̇
̇
(3.57)
per l’elemento
̇
-
̇
) [
,
-
̇
(
(3.58)
per l’energia potenziale
21
∑
-
∑
∑
∑
∑
∑
∑
(3.59)
per la forza lagrangiana
∑
∑
[(
[(
)
∑
) (∑
∑
(∑
∑
∑
∑
∑
)]
)].
(3.60)
In definitiva le equazioni di moto (3.54) diventano
̈
̇
.
(3.61)
22
4 Determinazione delle equazioni
di moto di un meccanismo
4.1 Esempio di caso non piano
Il sistema in questione è riportato schematicamente in Fig. 4.1. Un albero (corpo
) poggia su due cuscinetti
e ; all’albero è applicata la coppia motrice
mentre in
è montata una ruota dentata cilindrica. Tale ruota ingrana con una ruota conica (corpo 2)
mettendola in rotazione attorno al proprio asse. Il corpo 2 è poi collegato al corpo 3
mediante un elemento di forza ancorato ai corpi stessi nei punti
ed . Si noti come il
moto del sistema in questione non sia nel suo complesso piano (al contrario di quello dei
singoli corpi che lo compongono).
Figura 4.1 Meccanismo non piano
23
4.1.1 Soluzione newtoniana
Il sistema meccanico riportato in Fig. 4.1 è composto da
corpi distinti
aventi le seguenti caratteristiche dinamiche
[
]
[
]
[
] (4.1)
ed il cui stato può essere descritto dalle seguenti grandezze
(
)
(4.2)
I vincoli dei sistema possono essere riassunti come segue
-
vincolo dovuto ai cuscinetti
e
(equivalenti a una cerniera cilindrica)
(4.3)
(
-
)
vincolo dovuto alle ruote dentate che ingranano in
(4.4)
-
vincolo dovuto alla cerniera cilindrica in
(4.5)
-
(
)
(
)
vincolo di planarità sul corpo 3
.
(4.6)
Il sistema ha dunque un numero complessivo di gradi di libertà pari a
∑
∑
∑
∑
∑
.
(4.7)
Per quanto riguarda invece le azioni esterne si ha
,
(
)
(4.8)
24
(
),
(4.9)
(
),
(4.10)
(
),
(4.11)
mentre per quanto concerne le azioni dovute ad elementi di forza si può scrivere
̇
,
(
)
(4.12)
,
(
)
(4.13)
,
(4.14)
,
(4.15)
dove
.
(4.16)
Le reazioni vincolari agenti sul sistema sono inoltre
(
(
),
(
(
(
per un totale di
),
),
)
)
(4.17)
(
(
)
)
(
(4.18)
) (4.19)
(
),
(
)
(4.20)
(
),
(
)
(4.21)
grandezze incognite (pari al numero di vincoli; si
veda la (4.7)).
Ricordando infine che, nel caso in esame, si ha
25
[
(
)
],
[
[
]
(
)
],
[
]
[
[
]
(4.22)
(4.23)
]
le equazioni di moto (2.30)-(2.31) assumono la forma
̇
(4.24)
)
(4.25)
̈
̇
(
̇
̇
( )
( )
(4.26)
)
(4.27)
(
̈
̈
̇
̈ )
(
̇
(
̈
(4.28)
)
.
(4.29)
4.1.2 Soluzione lagrangiana (formulazione ridondante)
Lo stato del sistema è descritto dalle solite grandezze del caso precedente
(
)
(4.30)
mentre le equazioni di vincolo (4.3)-(4.6) possono essere compattate come segue
.
(
)
In virtù delle (4.22)-(4.23) le matrici
[
(4.31)
e
diventano
]
26
[
]
[
] (4.32)
(4.33)
mentre le azioni attive conservative agenti sul sistema (sia esterne che dovute ad elementi
di forza e causate sia dall’interazione con l’ambiente che da quella con altri corpi ) sono
(
),
(4.34)
(
),
(4.35)
(
),
(4.36)
(
,
)
(4.37)
,
(4.38)
,
;
(4.39)
a tali azioni si associano le energie potenziali
(4.40)
(4.41)
(4.42)
(4.43)
‖
‖
(4.44)
dove
.
(4.45)
Per quanto riguarda invece le azioni attive non conservative agenti sul sistema (sia
esterne che dovute ad elementi di forza e causate sia dall’interazione con l’ambiente che
da quella con altri corpi) si ha
,
(
)
(4.46)
̇
,
(
)
(4.47)
27
e quindi, in termini di forze lagrangiane,
(
(
)
)
(
(
(
)
)
).
(4.48)
Per quanto concerne inoltre i moltiplicatori di Lagrange
, essi permettono
(
)
di determinare la reazioni vincolari (contenenti a loro volta 14 parametri incogniti) come
spiegato nel paragrafo 3.1. Per completezza riportiamo per esteso le reazioni vincolari
associate al sistema studiato:
(
(
),
),
(
(
(
)
),
Notando infine che
)
(4.49)
(
(
)
)
(
(4.50)
) (4.51)
(
),
(
)
(4.52)
(
),
(
).
(4.53)
è costante (essendo
[
̇]
lineare) e che di conseguenza
̇
,
(4.54)
le equazioni di moto (3.26) assumono la forma
(
[
)
̈
( )
(
( )
).
(4.55)
]
4.1.3 Soluzione lagrangiana (formulazione non ridondante)
Supponiamo che lo stato del sistema sia descritto dalle seguenti variabili
lagrangiane
28
(
)
.
(4.56)
Sfruttando le relazioni vincolari (4.3)-(4.6) si ottiene
-
per l’energia cinetica
( ̇
-
)
(
̇ )
̇
( ̇
̇ )
‖
‖
̇
(4.57)
per l’energia potenziale
(4.58)
dove
[
(
-
)
]
[
]
(4.59)
per le forze lagrangiane
( )
̇
(4.60)
.
(4.61)
Le equazioni di moto (3.58) diventano a questo punto
(
( )
) ̈
(4.62)
̈
(4.63)
̈
(4.64)
̈
.
(4.65)
4.2 Esempio di caso piano
Il sistema in questione (macchina alternativa monocilindrica) è riportato
schematicamente in Fig. 4.2. Un pistone (corpo ) sottoposto alla forza motrice
di scorrere nelle sua sede. Il pistone è incernierato in
è incernierato in
è libero
al corpo 2 (biella) che a sua volta
al corpo 3 (manovella). Il corpo 3, sul quale agisce la coppia resistente
29
, è poi incernierato al telaio in . Come si può evincere immediatamente dalla Fig. 4.2
il sistema analizzato è piano ed ha come piano del moto
.
Figura 4.2 Meccanismo piano
4.2.1 Soluzione newtoniana
Il sistema meccanico riportato in Fig. 4.2 è composto da
corpi distinti
aventi le seguenti caratteristiche dinamiche
[
]
[
]
[
](4.66)
ed il cui stato può essere descritto dalle seguenti grandezze
(
)
(4.67)
I vincoli dei sistema possono essere riassunti come segue
-
-
-
vincolo di planarità del corpo 1
(
)
(4.68)
(
)
(4.69)
vincolo di traslazione sul corpo 1
vincolo dovuto alla cerniera cilindrica in
(
)
(4.70)
30
dove
(4.71)
-
vincolo di planarità del corpo 2
(
-
)
(4.72)
vincolo dovuto alla cerniera cilindrica in
(
)
(4.73)
dove
(4.74)
-
vincolo di planarità del corpo 3
(
-
)
(4.75)
vincolo dovuto alla cerniera cilindrica in
(
)
(4.76)
dove
.
(4.77)
Il sistema ha dunque un numero complessivo di gradi di libertà pari a
∑
∑
∑
∑
∑
.
(4.78)
Per quanto riguarda invece le azioni esterne si ha
(
),
(4.79)
(
),
(4.80)
(
),
(4.81)
,
(
)
(4.82)
31
(
),
(4.83)
mentre per quanto concerne le reazioni vincolari agenti sul sistema si può scrivere (si noti
che non sono presenti azioni dovute ad elementi di forza)
(
),
(
)
(4.84)
(
),
(
)
(4.85)
(
(
),
(4.86)
),
(
(
(4.87)
),
(
)
),
(
(
(4.89)
),
(
(4.88)
(4.90)
),
(
)
),
(4.91)
(4.92)
per un totale (eccettuati ovviamente i parametri legati ai vincoli di planarità) di
grandezze incognite (pari al numero di vincoli; si veda la (4.68)).
In definitiva le equazioni di moto (2.46)-(2.47) assumono dunque la forma
̇
̈
(
)
(
)
(4.93)
32
̇
( )
(
)
(4.94)
̈
̇
̈ )
(
̇
(
̈
(
)
(
)
(4.95)
)
(4.96)
̈
̇
̇
(
̈ )
(
̈
(
)
)
(4.97)
(
)
.
(4.98)
4.2.2 Soluzione lagrangiana (formulazione ridondante)
Lo stato del sistema è descritto dalle solite grandezze del caso precedente dalle
quali sono state estratte quelle relative ai gradi di libertà piani
(
)
(4.99)
mentre le equazioni di vincolo (4.68)-(4.77) possono essere compattate come segue
.
(
)
Per quanto riguarda invece le matrici
,
[
[
(4.100)
e
si ha
]
]
[
] (4.101)
33
,
,
.
(4.102)
Le azioni attive conservative agenti sul sistema (sia esterne che dovute ad elementi
di forza e causate sia dall’interazione con l’ambiente che da quella con altri corpi ) sono
(
),
(4.103)
(
),
(4.104)
(
),
;
(4.105)
a tali azioni si associano le energie potenziali
(4.106)
(4.107)
.
(4.108)
Per quanto concerne poi le azioni attive non conservative agenti sul sistema (sia
esterne che dovute ad elementi di forza e causate sia dall’interazione con l’ambiente che
da quella con altri corpi) si ha
(
),
(4.109)
(
,
)
(4.110)
e quindi, in termini di forze lagrangiane,
(
)
( )
(
Per quanto concerne inoltre i moltiplicatori di Lagrange
).
(4.111)
, essi permettono
di determinare la reazioni vincolari (contenenti a loro volta 17 parametri incogniti) come
spiegato nel paragrafo 3.1. Per completezza riportiamo per esteso le reazioni vincolari
associate al sistema studiato:
(
),
(
)
(4.112)
(
),
(
)
(4.113)
34
(
),
(
),
(
(
)
(4.115)
),
(
(4.116)
),
(4.117)
(
),
(
(
(4.114)
(4.118)
),
(
)
(4.119)
),
.
(4.120)
Le equazioni di moto (3.37) assumono dunque la forma
(
[
)
̈
( )
(
( )
).
(4.121)
]
4.2.3 Soluzione lagrangiana (formulazione non ridondante)
Il sistema in questione oltre ad essere piano ammette un solo grado di libertà ed è
completamente descritto dalla variabile lagrangiana
.
.
(4.125)
Dalle equazioni di vincolo (4.67)-(4.77) si deduce che
̅̅̅̅
̅̅̅̅
̅̅̅̅
̅̅̅̅
̅̅̅̅
̅̅̅̅̅
̅̅̅̅̅
̅̅̅̅̅
(4.126)
(4.127)
(4.128)
(4.129)
(4.130)
35
̅̅̅̅̅
(4.131)
da cui si possono ricavare le relazioni
,
,
,
,
,
.
Sfruttando tali relazioni si ottengono le seguenti espressioni
-
per l’energia cinetica
( ̇
̇
̅̅̅̅̅
̇
̇ )
( ̇
̇
(
̇
̇
(4.132)
per l’energia potenziale
̅̅̅̅̅
-
̇ =
̇
) ̇
̇
-
̇ )
̅̅̅̅̅
(4.133)
per la forza lagrangiana
(̅̅̅̅
̅̅̅̅
(
)
)
.
(4.134)
L’equazione di moto (3.65) diventa dunque
̈
̇
.
(4.135)
36
5 Macchine alternative
monocilindriche
In questo capitolo sarà dapprima illustrato il concetto di massa di sostituzione,
strumento particolarmente utile nello studio della dinamica dei sistemi multibody.
Successivamente verrà analizzata nel dettaglio la dinamica delle macchine
alternative monocilindriche con particolare riguardo al bilanciamento di queste ultime.
5.1 Masse di sostituzione
Per masse di sostituzione si intende un sistema di punti materiali (
dinamicamente equivalente (avente cioè la stessa
rigido (dove i punti
massa
[
e lo stesso
)
) ad un dato corpo
] sono espressi in una terna con origine nel centro di
del corpo). Se si indicano con
e
[
] le caratteristiche
inerziali del corpo rigido in questione (riferite sempre ad una terna con origine in
),
l’equivalenza dinamica equivale alle seguenti condizioni
∑
(5.1)
∑
(5.2)
∑
(5.3)
∑
(5.4)
∑
(5.5)
∑
(5.6)
∑
(5.7)
∑
(5.8)
37
∑
∑
(5.9)
.
(5.10)
La prima equazione rappresenta l’equivalenza della massa, le equazioni (5.2)-(5.7)
impongono l’equivalenza dei momenti di inerzia mentre le equazioni (5.8)-(5.10) e
richiedono la coincidenza dei centri di massa dei due sistemi considerati.
Come incognite nelle (5.1)-(5.10) possono essere scelte ad esempio le masse
da posizionare in punti
aventi coordinate prefissate. In questo caso il corpo rigido può
essere sostituito da un sistema di
masse.
Se per entrambi i sistemi si sceglie una terna di riferimento principale con origine
in
(per il sistema di punti materiali è sufficiente ad esempio che le masse siano
posizionate sugli assi stessi della terna), le (5.1)-(5.10) diventano
∑
(5.11)
∑
(5.12)
∑
(5.13)
∑
(5.14)
∑
(5.15)
∑
∑
Se le coordinate dei punti
(5.16)
.
sono prefissate, il corpo rigido può essere in questo
caso sostituito da un sistema di
masse.
Se poi consideriamo un moto piano (con piano del moto
masse sul piano
(5.17)
) e disponiamo le
, le equazioni (5.11)-(5.17) assumono la forma
∑
∑
(5.18)
(5.19)
∑
(5.20)
∑
(5.21)
nelle quali le equazioni (5.13)-(5.14) non compaiono più poiché i momenti di inerzia
e
non influenzano più il moto. Il corpo rigido può essere ora sostituito da un sistema di
masse (le coordinate dei punti
sono sempre prefissate).
Tale relazioni possono infine ulteriormente ridursi se le masse di sostituzione
vengono posizionate lungo una qualunque retta passante per il centro di massa
, ad
esempio sull’asse . In questo caso si ha
38
∑
(5.22)
∑
(5.23)
∑
.
(5.24)
Il corpo rigido è adesso equivalente ad un sistema di sole
coordinate
masse aventi
prefissate.
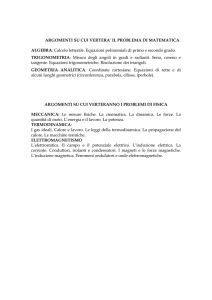
5.2 Manovellismo di spinta
Nel seguito verrà descritto il funzionamento di un generico manovellismo di
spinta (macchina alternativa monocilindrica) sia da un punto di vista cinematico che da
un punto di vista dinamico. Sarà inoltre studiato il possibile bilanciamento di tale
meccanismo.
5.2.1 Manovellismo di spinta: cinematica
Nel seguito faremo riferimento per semplicità alla situazione descritta in Fig. 5.1.
Figura 5.1 Manovellismo di spinta
Con
dall’origine
trova in
mentre
). La variabile
la direzione
moto di
si è indicato lo spostamento del punto
mentre
ovvero con
è la posizione di punto morto interno (nella quale il punto
rappresenta l’angolo che l’asse della manovella
si
forma con
è l’angolo che l’asse
della biella forma con la direzione del
(in particolare si ha
sia nel punto morto interno che in
quello esterno). Indichiamo infine con
con
(piede di biella) a partire
̅̅̅̅̅ la lunghezza del raggio di manovella e
̅̅̅̅ la lunghezza della biella. Proiettando la spezzata
sia lungo
che in
direzione ad esso normale si ottiene
39
(5.25)
.
Ponendo
(5.26)
dalla (5.26) si ha
√
(5.27)
dove il segno negativo prima della radice è necessario perché
. La (5.25) diviene
perciò
[
√
].
(5.28)
Per usi correnti la (5.28) può essere semplificata. Infatti il rapporto
sempre piccolo rispetto all’unità (solitamente dell’ordine di
è quasi
). Di conseguenza è
possibile sviluppare in serie di Taylor la radice presente all’interno della (5.28)
fermandosi ai termini del secondo ordine:
√
(5.29)
da cui
[
].
(5.30)
Derivando due volte rispetto al tempo la (5.30) si ottengono la velocità
l’accelerazione
e
del punto :
̇[
]
̇
(5.31)
̈[
La (5.32) si riduce poi per ̇
].
(5.32)
alla
̇
.
In qualche caso può essere comodo limitarsi a considerare per
(5.33)
,
,
espressioni di prima approssimazione trascurando, nelle (5.30), (5.31) e (5.33), i termini
contenenti
rispetto ai termini che non lo contengono ovvero
[
]
(5.34)
̇
(5.35)
̇
.
Può essere infine interessante trovare un legame diretto tra le grandezze
(5.36)
,
̇,
̇ . Se consideriamo le relazioni (5.34)-(5.36) si ottiene
̇
(
̇
)
(5.37)
(5.38)
40
ovvero una circonferenza ed una retta. Se invece si considerano le (5.30), (5.31), (5.33) si
ottengono equazioni più complicate. La relazione tra
sua simmetria rispetto all’asse delle
̇ mantiene solamente la
e
mentre il legame tra
e
̇ diventa di tipo
]
(5.39)
parabolico; le (5.30), (5.33) possono essere infatti scritte come
(
)
[
[
̇
]
(5.40)
da cui
(
)
(
(5.41)
̇
)
.
̇
Osservando che
(5.42)
, se ne deduce che tra
̇
e
esiste una relazione di secondo grado parabolica. In corrispondenza dei punti morti
interno ed esterno (
,
) si ha poi, sempre in base alle (5.30), (5.31), (5.33),
,
(5.43)
,
̇
(5.44)
̇
,
.
(5.45)
5.2.2 Manovellismo di spinta: masse di sostituzione per la
biella
Una prima possibile scelta per quanto riguarda le masse di sostituzione della biella
consiste nel posizionare tre masse
indicheremo
̅̅̅̅̅̅,
̅̅̅̅̅̅,
,
e
nei punti
,
e
(nel seguito
). Di conseguenza le (5.22)-(5.24) diventano
(5.46)
(5.47)
(5.48)
dove
e
rappresentano le caratteristiche inerziali della biella; da tali relazioni si
ottiene quindi
(5.49)
che, nel caso di asta snella (
), danno
.
(5.50)
41
Una soluzione più comoda, che permette tra le altre cose di calcolare l’energia
cinetica della biella una volta note le velocità di due suoi punti, si ottiene sostituendo la
biella con un sistema equivalente di due masse ed un momento di inerzia puro (al quale
cioè non corrisponde una distribuzione di massa reale e che quindi non ha significato
fisico ma solamente algebrico). Indicando tali grandezze con
,
e
si ha
(5.51)
(5.52)
(5.53)
da cui
;
nel caso di asta snella (
(5.54)
) si ottiene
.
(5.55)
5.2.3 Manovellismo di spinta: dinamica
Per scrivere l’equazione di moto della biella, analogamente a quanto fatto nel
. L’energia cinetica
paragrafo 4.2.3, è possibile partire dalla relazione (3.65) dove
del sistema è la somma dei seguenti contributi
̅̅̅̅̅̅̅
(
) ̇
̃
̇
-
l’energia cinetica della manovella
-
l’energia cinetica del pistone ovvero
-
l’energia cinetica della biella pari all’energia cinetica delle sue masse di
sostituzione (compreso il momento di inerzia fittizio)
̇
nei quali
̇ . Per quanto riguarda l’angolo
è data dalla (5.35)) mentre
,
derivando la (5.26) si ottiene
̇
̇
(5.56)
da cui essendo
̇
̇
;
(5.57)
derivando nuovamente si ha poi
̈
̈
̇
.
(5.58)
42
In definitiva dunque l’energia cinetica
̃
̇
del sistema assume l’espressione
̇
̇
̇
̇
[(
̃
)
[
dove il termine
̇
(
)
] ̇
] ̇
(5.59)
rappresenta il contributo delle masse alterne e
rotanti (si note come il momento d’inerzia fittizio
quello delle masse
generi un contributo in entrambi i
termini).
L’energia
dovuta all’azione gravitazionale (solitamente trascurabile rispetto alle
altre azioni che agiscono sul sistema) può essere calcolata come segue
̅̅̅̅̅̅
(̅̅̅̅̅̅
̅̅̅̅̅̅̅
)
mentre per quanto concerne la forza lagrangiana
(
̅̅̅̅̅̅̅
(5.60)
si ha
)
.
(5.61)
In definitiva dunque l’equazione di moto (3.65) diventa
̈
̇
.
(5.62)
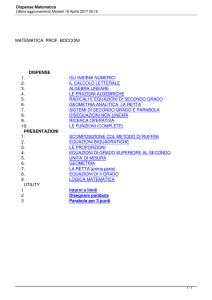
5.2.4 Manovellismo di spinta: bilanciamento
Si consideri il manovellismo di spinta rappresentato in Fig. 5.2 e si supponga che
la manovella ruoti con velocità angolare ̇
. I suoi membri in movimento sono
soggetti alle seguenti forze esterne (si trascura l’effetto dell’azione gravitazionale):
-
la spinta
-
la reazione
[
] del fluido agente sulla testa del pistone
[
] esercitata dalle pareti del cilindro (che in assenza di
attrito è normale all’asse del cilindro stesso)
-
la reazione
esercitata sulla manovella attraverso la coppia rotoidale in
(decomponibile nelle componenti longitudinali e laterali
-
e
).
la coppia resistenza applicata alla manovella
43
Figura 5.2 Manovellismo di spinta: bilanciamento
Per il principio di D’Alembert tale sistema di forze è equilibrato dalle forze
d’inerzia associate alle masse del meccanismo ovvero
-
) ̇ [
-
(
la forza d’inerzia delle masse alterne
] dove
)[
è
̇
̈ dove ̈ può essere calcolato con la
la coppia d’inerzia della biella pari a
(5.58) ovvero ̈
̅̅̅̅̅̅̅
]
data dalla (5.33) e cioè
-
(
la forza d’inerzia delle masse rotanti (forze centrifuga)
̈
̇
̇
.
Imponendo l’equilibrio tra le forze suddette si ottiene dunque
(5.63)
(5.64)
̈
(5.65)
dalle quali è possibile ricavare le azioni agenti sul telaio
(5.66)
̈
̈
.
(5.67)
(5.68)
44
La macchina alternativa monocilindrica si dice equilibrato o bilanciato quando la
risultante delle azioni che sollecitano il telaio è nulla (ovvero quando si annullano
e
). In generale è assai difficile ottenere un bilanciamento
completo ma dal punto di vista tecnico è sufficiente annullare i termini alternativi di
maggiore ampiezza che tendono a portare in vibrazione il complesso su sui il telaio è
montato. Le azioni agenti sul telaio possono suddivise nel modo seguente:
-
l’insieme delle due forze verticali
,
agenti rispettivamente in
costituisce una coppia di momento
ed in
pari a quella agente sulla manovella;
essa è detta coppia di reazione del meccanismo ed è costante o comunque
varia molto lentamente (per tale motivo non produce particolari inconvenienti)
-
[
la forza
] è detta forza rotante; essa ha la direzione
dell’asse della manovella (ovvero
) e, ruotando con essa a velocità
angolare ̇ , tende a portare in vibrazione il telaio nelle direzioni
-
la forza
, detta forza alterna, è diretta lungo l’asse
periodico essendo proporzionale ad
e
ed ha carattere
; essa rappresenta il termine più
pericoloso essendo di difficile equilibratura
-
l’insieme delle due forze verticali
̈
̈
,
agenti rispettivamente in
ed in
̈ pari alla coppia fittizia agente
costituisce una coppia di momento
sulla biella; essa è detta coppia d’inerzia della biella ed è anch’essa di tipo
periodico ma in generale di intensità limitata.
Vediamo ora quali possibilità tecniche sussistono per annullare (del tutto o in
parte) la azioni suddette (forza rotante, forza alterna e coppia d’inerzia della biella).
La forza rotante
può essere facilmente annullata. Il termine
̅̅̅̅̅̅̅
rappresenta infatti il momento statico rispetto all’asse di rotazione della manovella della
massa della manovella stessa e della massa di sostituzione della biella posizionata in
esso è di conseguenza nullo se il centro di massa
opposta a quella del punto
;
della manovella si trova dalla parte
rispetto al centro di rotazione
ovvero nel punto definito
come
(
).
(5.69)
45
Tale soluzione si realizza molto semplicemente disponendo dei contrappesi
nell’albero a gomiti del motore.
Per quanto riguarda la forza alterna
, essa può essere scomposta in forza alterna
del I ordine e forza alterna del II ordine:
(
)
̇ [
(
)
̇ [
]
(5.70)
]
(5.71)
In linea teorica entrambe le forze alterne possono essere eliminate se si annulla il
termine
(5.72)
scegliendo
; ciò equivale a portare il centro di massa della biella
all’esterno del segmento
dalla parte di . Una soluzione di questo tipo incontra grosse
difficoltà costruttive e non è mai stata realizzata. Ne segue che in una macchina
alternativa monocilindrica le forza alterne non possono mai essere del tutto bilanciate.
E’ possibile tuttavia una compensazione parziale di tali azioni. La forza alterna del
I ordine può essere infatti immaginata come prodotta da due masse di valore
poste rispettivamente nel punto
velocità angolare ̇ (massa rotante) e
e nel suo simmetrico rispetto ad
e rotanti con
̇ (massa controrotante) ovvero
̇ [
]
̇ [
] (5.73)
Analogamente le forza alterne del II ordine possono considerarsi dovute a due
masse di valore
rispetto ad
poste rispettivamente nel punto
e nel suo simmetrico
̇ (massa rotante) e
e rotanti con velocità angolare
̇ (massa
controrotante) ovvero
̇
̇
[
[
]
] .
(5.74)
Pertanto, poiché la componente rotante della forza alterna del I ordine ha la stessa
struttura delle forze rotanti vere e proprie e si somma con esse, può essere annullata
aumentando semplicemente il contrappeso della manovella di una quantità pari a
. Rimangono tuttavia nono bilanciate la componente controrotante
della forza
alterna del I ordine e l’intera forza alterna del II ordine.
Per quanto concerne infine la coppia d’inerzia della biella
che essa può essere annullata con l’aggiunta di due ulteriori massa
̈ , si può verificare
e
nei punti
46
estremi della biella
e
; tali masse, opportunamente dimensionate, annullano l’effetto
del momento d’inerzia fittizio
(si ricordi che
è negativo). Ciò comporta tuttavia un
incremento della massa della biella ed un conseguente aumento sia delle forze alterne che
delle forze rotanti.
47
6 Macchine alternative
pluricilindriche
In questo verrà analizzato nel dettaglio il bilanciamento delle macchine alternative
pluricilindriche. Gli strumenti di analisi sviluppati saranno poi applicati ad alcuni casi di
particolare interesse pratico.
6.1 Macchine alternative pluricilindriche:
bilanciamento
Si consideri la macchina alternativa a
cilindri in linea schematicamente
rappresentata in Fig. 6.1.
Figura 6.1 Macchina alternativa a N cilindri in linea
48
Nel seguito, durante l’analisi della macchina alternativa in questione, si supporrà
come nel capitolo precedente che
̇
; allo stesso tempo verranno trascurati sia
l’effetto dell’azione gravitazionale (trascurabile rispetto alle altre azioni in gioco) sia
l’effetto della coppia di reazione del meccanismo (costante o comunque variabile molto
lentamente). Alla luce di quanto detto sul telaio della macchina alternativa a
cilindri in
linea agiscono le seguenti azioni:
-
la somma di tutte le forze alterne e rotanti (già espresse in componenti
∑
∑
[
[
]
∑
[
)
]
̇
]
̇
̇ ∑
̇ ∑
∑
(5.75)
̇ ∑
nelle quali le grandezze
(5.76)
̅̅̅̅̅̅̅
,
,
e
(oltre ovviamente alla velocità angolare ̇ ) sono state ritenute per semplicità
uguali per tutti i cilindri
-
la somma dei momenti (calcolati rispetto al punto
) associati a tutte le forze
alterne e rotanti e di quelli associati alle coppie d’inerzia delle bielle (già
espressi in componenti
)
∑
∑
∑
[
̇ ∑
[
]
∑
(5.77)
[
]
̇
̇
̇ ∑
̇ ∑
∑
nelle quali
∑
̇ ∑
̈
]
(5.78)
(5.79)
è uguale per tutti i cilindri.
Per quanto visto in precedenza è possibile annullare le singole forze rotanti
contrappesando le singole manovelle; più semplicemente si può annullare la loro somma
contrappesando due sole manovelle, ad esempio quelle esterne. Un’alternativa assai più
interessante consiste nel disporre i cilindri in modo che le varie azioni agenti sul telaio si
annullino reciprocamente. Per studiare questo problema prendiamo in considerazione il
contributo delle sole forze alterne
̇
∑
∑
(5.80)
49
̇
Le quantità
e
∑
∑
.
(5.81)
si annullano se è zero sia il contributo delle forze alterne del
I ordine
∑
(5.82)
∑
(5.83)
che quello delle forze alterne del II ordine
∑
(5.84)
∑
Se indichiamo con
.
(5.85)
lo sfasamento della manovella
rispetto alla prima
(5.86)
le condizioni (5.82)-(5.85) diventano
∑
∑
∑
∑
∑
(5.88)
∑
∑
poiché poi l’angolo
(5.87)
(5.89)
∑
;
(5.90)
varia nel tempo, le (5.87)-(5.90) sono soddisfatte se e solo se
∑
(5.91)
∑
(5.92)
∑
(5.93)
∑
(5.94)
∑
(5.95)
∑
(5.96)
∑
(5.97)
∑
.
(5.98)
Se ora consideriamo i contributi delle forze rotanti e delle coppie d’inerzia delle
bielle si ha
̇ ∑
(5.99)
̇ ∑
(5.100)
̇ ∑
(5.101)
̇ ∑
(5.102)
̇ ∑
.
(5.103)
Le (5.99)-(5.103) si annullano se
50
∑
(5.104)
∑
(5.105)
∑
(5.106)
∑
(5.107)
che, ricordando la (5.86), equivalgono alle
∑
∑
∑
∑
∑
(5.108)
∑
(5.109)
∑
(5.110)
∑
(5.111)
e quindi alle
∑
(5.112)
∑
(5.113)
∑
(5.114)
∑
.
(5.115)
Le (5.112)-(5.113) altro non sono che le (5.91)-(5.94). Se ne deduce quindi che, se
sono soddisfatte le condizioni (5.91)-(5.98) (ovvero se sono equilibrate le forze alterne),
allora è equilibrato l’intero sistema di forze d’inerzia.
Si tratta adesso di verificare se le equazioni (5.91)-(5.98) possono essere
soddisfatte nei casi che interessano le applicazioni tecniche. A questo proposito occorre
innanzi tutto osservare che gli angoli
sono soggetti all’ulteriore condizione di
mantenere la massima uniformità possibile della coppia
fornita dal motore, tenendo
conto del fatto che la coppia si sviluppa soltanto in alcune fasi del ciclo (fase di scoppio espansione). Da questa condizione deriva che sull’albero vi devono essere manovelle
sfasate ciascuna rispetto alla precedente di un angolo pari a
(5.116)
per motori a due tempi e pari a
(5.117)
per motori a quattro tempi (
è sempre il numero dei cilindri). Gli angoli
,
indipendentemente dall’ordine dei pistoni sull’albero, devono dunque prendere i seguenti
valori:
.
(5.118)
51
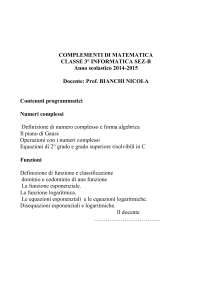
6.2 Macchine alternative pluricilindriche: motore a 2
cilindri (2 tempi)
(5.119)
(5.120)
(5.121)
(5.122)
Figura 6.2 Albero a gomiti di un motore a 2 cilindri (2 tempi)
∑
(5.123)
∑
(5.124)
∑
(5.125)
∑
(5.126)
Figura 6.3 Forze alterne rotanti del I e del II ordine (𝑭𝒂𝑰𝒓𝒙𝒊 , 𝑭𝒂𝑰𝑰𝒓𝒙𝒊 ) per un
motore a 2 cilindri (2 tempi)
52
6.3 Macchine alternative pluricilindriche: motore a 2
cilindri (4 tempi)
(5.127)
(5.128)
(5.129)
(5.130)
Figura 6.4 Albero a gomiti di un motore a 2 cilindri (4 tempi)
∑
(5.131)
∑
(5.132)
∑
(5.133)
∑
(5.134)
Figura 6.5 Forze alterne rotanti del I e del II ordine (𝑭𝒂𝑰𝒓𝒙𝒊 , 𝑭𝒂𝑰𝑰𝒓𝒙𝒊 ) per un
motore a 2 cilindri (4 tempi)
53
6.4 Macchine alternative pluricilindriche: motore a 3
cilindri (2 tempi)
(5.135)
(5.136)
(5.137)
(5.138)
Figura 6.6 Albero a gomiti di un motore a 3 cilindri (2 tempi)
∑
(5.139)
∑
(5.140)
∑
(5.141)
∑
(5.142)
Figura 6.7 Forze alterne rotanti del I e del II ordine (𝑭𝒂𝑰𝒓𝒙𝒊 , 𝑭𝒂𝑰𝑰𝒓𝒙𝒊 ) per un
motore a 3 cilindri (2 tempi)
54
6.5 Macchine alternative pluricilindriche: motore a 3
cilindri (4 tempi)
(5.143)
(5.144)
(5.145)
(5.146)
Figura 6.8 Albero a gomiti di un motore a 3 cilindri (4 tempi)
∑
(5.147)
∑
(5.148)
∑
(5.149)
∑
(5.150)
Figura 6.9 Forze alterne rotanti del I e del II ordine (𝑭𝒂𝑰𝒓𝒙𝒊 , 𝑭𝒂𝑰𝑰𝒓𝒙𝒊 ) per un
motore a 3 cilindri (4 tempi)
55
6.6 Macchine alternative pluricilindriche: motore a 4
cilindri (2 tempi)
(5.151)
(5.152)
(5.153)
(5.154)
Figura 6.10 Albero a gomiti di un motore a 4 cilindri (2 tempi)
∑
(5.155)
∑
(5.156)
∑
(5.157)
∑
(5.158)
Figura 6.11 Forze alterne rotanti del I e del II ordine (𝑭𝒂𝑰𝒓𝒙𝒊, 𝑭𝒂𝑰𝑰𝒓𝒙𝒊 ) per un
motore a 4 cilindri (2 tempi)
56
6.7 Macchine alternative pluricilindriche: motore a 4
cilindri (4 tempi)
(5.159)
(5.160)
(5.161)
(5.162)
Figura 6.12 Albero a gomiti di un motore a 4 cilindri (4 tempi)
∑
(5.163)
∑
(5.164)
∑
(5.165)
∑
(5.166)
Figura 6.13 Forze alterne rotanti del I e del II ordine (𝑭𝒂𝑰𝒓𝒙𝒊, 𝑭𝒂𝑰𝑰𝒓𝒙𝒊 ) per un
motore a 4 cilindri (4 tempi)
57
6.8 Macchine alternative pluricilindriche: motore a 6
cilindri (4 tempi)
(5.167)
(5.168)
(5.169)
(5.170)
Figura 6.14 Albero a gomiti di un motore a 6 cilindri (4 tempi)
∑
(5.171)
∑
(5.172)
∑
(5.173)
∑
(5.174)
Figura 6.15 Forze alterne rotanti del I e del II ordine (𝑭𝒂𝑰𝒓𝒙𝒊, 𝑭𝒂𝑰𝑰𝒓𝒙𝒊 ) per un
motore a 6 cilindri (4 tempi)
58
6.9 Macchine alternative pluricilindriche: motore a 8
cilindri (4 tempi)
(5.175)
(5.176)
(5.177)
(5.178)
Figura 6.16 Albero a gomiti di un motore a 8 cilindri (4 tempi)
∑
(5.179)
∑
(5.180)
∑
(5.181)
∑
(5.182)
Figura 6.17 Forze alterne rotanti del I e del II ordine (𝑭𝒂𝑰𝒓𝒙𝒊, 𝑭𝒂𝑰𝑰𝒓𝒙𝒊 ) per un
motore a 8 cilindri (4 tempi)
59
7 Bibliografia
[B1] E. Funaioli, A. Maggiore, U. Meneghetti. Meccanica applicata alle macchine.
Patron Editore.
[B2] L. Sciavicco, B. Siciliano. Robotica industriale. McGraw-Hill Editore.
[B3] F. Cheli, E. Pennestrì. Cinematica e dinamica dei sistemi multibody. Casa
Editrice Ambrosiana.
60