.")
PLC
Vantaggi rispetto alla logica cablata: Controlli meccanici, idraulici, pneumatici, elettrico elettronici, a memoria programmabile.
PLC = Controllori a logica programmabile. Hanno analogia con i vecchi contattori.
Prima dell’avvento del PLC che realizzano circuiti a logica programmabile tutti i circuiti venivano
eseguiti a logica cablata (CLC).
Al controllore vengono collegati sull’ingresso i sensori (interruttori o tasti) e sull’uscita gli attuatori
(lampade, contattori, ecc.) per le funzioni da realizzare. Nella memoria del PLC viene introdotto il
programma che sostituisce gli elementi di commutazione di un CLC (interruttori, commutatori,
invertitori, ecc.)
Le combinazioni logiche nel CLC vengono realizzate con dei collegamenti tramite fili elettrici
mentre nel PLC tramite il programma. Eventuali modifiche comportano un ricablaggio per i CLC e
una modifica del programma per i PLC (in quest’ultimo caso si ottiene un notevole risparmio di
tempo e di materiale).
Per caricare i programmi nel controllore serve un computer come dispositivo di programmazione
(PG). Il PG si rende utile anche per la verifica di eventuali errori nella programmazione e per
l’individuazione dei guasti di funzionamento.
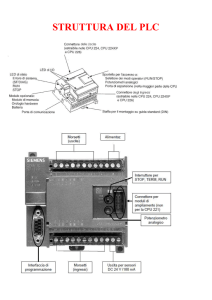
LA STRUTTURA DI UN PLC.
Concetti fondamentali: In base alle norme DIN 19239 un PLC può essere programmato nei
linguaggi FUP, KOP, AWL.
FUP è un linguaggio grafico che opera con i simboli di uno schema logico.
KOP opera con simboli dello schema a contatti. Applicando l’esempio delle funzioni logiche OR e
AND in KOP sarebbe:
AWL è un linguaggio di programmazione listato. Vediamo anche qui un esempio di porte Or ed
AND.
Il PLC dispone al suo interno di alimentatore, Cpu, schede di ingresso – uscita. La CPU contiene il
processore e la memoria di programma. Dopo che il processore elabora in continuazione il
programma nella memoria, interrogando gli ingressi, con i risultati dell’elaborazione commuta le
varie uscite in base a quanto richiesto dal programma.
Lo svolgimento di determinate funzioni si dice processo. Il PLC riceve lo stato del processo
attraverso i sensori e influisce sul processo azionando gli attuatori. Per far ciò il PLC registra tutti
gli stati degli ingressi e delle uscite in una zona della memoria creando una “immagine di processo”
negli ingressi (IPI) e nelle uscite (IPU). Queste vengono registrate in una memoria RAM e
aggiornate ciclicamente dopo un certo intervallo di tempo (LOOP). Ogni sensore ha riservata una
cella di memoria nella IPI per cui lo stato di un sensore fisico non viene letto sulla scheda di
ingresso ma in questa cella della IPI. Per gli attuatori avviene la stessa cosa nelle celle
corrispondenti della IPU nella RAM.
L’elaborazione completa del programma viene detta ciclo di lavoro ed ha questi tre passi:
1) aggiornamento della IPI con lettura della stato fisico degli ingressi trasformato in parola
digitale e inviato nella sezione IPI (immagine di processo degli ingressi) della RAM.
2) Elaborazione del programma che è nella memoria del PLC.
3) Legge le istruzioni nella memoria, interroga gli stati dell’ingresso ed effettua le
combinazioni logiche che vengono registrati nella IPU che li invia alle uscite fisiche.
A questo punto parte un nuovo ciclo. Dal tempo di ciclo si può dedurre la rapidità di in PLC per
reagire ai cambiamenti di stato degli ingressi.
HARDWARE: Ci sono delle unità modulari su una guida profilata: alimentatore (a 5 V o 24 V);
CPU; bus di collegamento per lo scambio dei dati e l’inoltro dei comandi. Generalmente il bus ha
conduttori paralleli dove sono posti i bus indirizzi che interrogano gli indirizzi assegnati alle unità
(es. uscita 5 sul connettore 7). I bus comandi inviano i comandi (es. assegnazione di segnali binari
alle uscite). I bus dati per trasferire i dati di un comando (es. stabilire lo stato dei segnali sulle
uscite).
RAM = memoria a scrittura – lettura di tipo volatile. Si resetta se non alimentata.
ROM = memoria a sola lettura di tipo non volatile. Mantiene sempre gli stati scritti dal costruttore.
PROM = memoria a sola lettura di tipo non volatile ma programmabile una sola volta dall’utente.
EPROM = memoria a scrittura – lettura di tipo non volatile con programmi che possono essere più
volte letti e scritti dall’utente.
EEPROM = memoria a scrittura - lettura di tipo non volatile che può essere programmata con dei
comandi elettrici.
SCHEDE INGRESSO – USCITA:
Indirizzamento: I 1.4
sta ad indicare che sul connettore 1 è collegata la scheda d’ingresso
sul contatto 4 (di 8 -> da 0 a 7). Così pure per le uscite.
SOFTWARE:
SISTEMA OPERATIVO: = Programma sempre presente nel PLC ed indispensabile per il suo
funzionamento. Elemento di unione tra hardware e programmi applicativi. Consente pure la
comunicazione tra il PLC ed il dispositivo di programmazione.
PROGRAMMI APPLICATIVI: Creati dal programmatore per gestire l’impianto. Il dispositivo di
programmazione dispone di un linguaggio specifico, ad es. il programma STEP 5 ha i linguaggi
FUP, KOP, AWL. Il PLC successivamente si traduce questo linguaggio nel suo linguaggio di
macchina.
PROGRAMMAZIONE DI UN PLC.
CONCETTI BASE: I Merker memorizzano stati di segnali. Contatori. Temporizzatori.
KOP: = Schema a contatti.
PROGRAMMA DI UN PLC: 1) FORMULAZIONE DEL PROBLEMA -- raccolta di schemi
secondo le normative, diagrammi funzionali, diagrammi di flusso, diagrammi strutturali.
Si suddivide la sequenza complessiva in più passi singoli che vengono eseguiti uno dopo l’altro.
SCHEMA FUNZIONALE: schema elettrico da realizzare.
DIAGRAMMI FUNZIONALI permettono di rappresentare i cambiamenti di stato di sensori e
attuatori in funzione del tempo.
DIAGRAMMI DI FLUSSO usati dagli informatici.
2) CREAZIONE DELLA STRUTTURA DEL PROGRAMMA. Si organizza il programma secondo
vari blocchi più elementari che assieme lo compongono.
3) LISTA ATTRIBUZIONI:
INDIRIZZO
SIMBOLO
COMMENTO
I 1.0
I1.1
I1.2
I1.3
I1.4
I1.5
A2.0
A2.1
N1
N2
N3
N4
W1
W2
T1
A5
Interruttore di prossimità sinistra
Interruttore di prossimità destra
Interruttore di prossimità POS. 1
Interruttore di prossimità POS. 2
Getto acqua 1
Getto acqua 2
Asciugatura
Aspirazione
4) PROGRAMMAZIONE DELLE FUNZIONI PARZIALI: Si programmano i segmenti sulla base
della struttura di programma e della lista di attribuzione.
PRESSA:
INDIRIZZO
SIMBOLO
COMMENTO
I 1.0
I1.1
I1.2
S1
S2
F1
I1.3
N1
I1.4
N2
I1.5
N3
Q2.0
T0
V1
Timer
Tasto START
Tasto STOP/N
Tasto consenso )con pos.di
arresto)
Interruttore di prossimità (griglia
di protezione chiusa)/N
Interruttore di prossimità (stampo
inserito)
Interruttore di prossimità (pezzo
presente)
Valvola per cilindro pressa
Temporizzatore durata pressatura
--------I I----------I I--------I I-------I I-------( )
N1
N2
N3
M10.1 Q2.0
.")