IL PLC
AUTOMAZIONE INDUSTRIALE
1
LA STORIA DEL PLC
NASCE NEGLI ANNI 70 DALL’IDEA DEGLI
ASSOCIATES BEDFORD ED ERA CHIAMATO
MODULAR DIGITAL CONTROLLER ( MODICON )
NACQUE PER SOSTITUIRE I SISTEMI DI
CONTROLLO A RELE’ COMPLICATI E SOGGETTI
AD ERRORI E QUINDI CON COSTI DI GESTIONE
ELEVATI
2
DEFINIZIONE
IL PLC ACRONIMO DI “PROGRAMMABLE LOGIC
CONTROLLER” E’ UN SISTEMA ELETTRONICO A
FUNZIONAMENTO DIGITALE, CHE USA UNA
MEMORIA PROGRAMMABILE PER ARCHIVIARE
ISTRUZIONI UTILI A FUNZIONI LOGICHE, DI
TEMPORIZZAZIONE, DI CONTEGGIO E CALCOLO
ARITMETICO OLTRE CHE PER CONTROLLARE
MACCHINE E PROCESSI
3
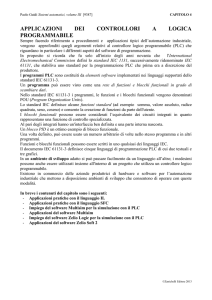
IL PLC
4
UTILIZZI
SOSTITUISCE I QUADRI A RELE’ NELLA
REALIZZAZIONE DI MACCHINE SEQUENZIALI, IN
QUANTO LA LOGICA CABLATA RICHIEDE
MODIFICHE AL QUADRO ELETTRICO QUANDO
VARIA IL PROGETTO DEL CICLO DI
LAVORAZIONE, MENTRE CON LA LOGICA
PROGRAMMABILE BASTA RISCRIVERE LE
ISTRUZIONI DEL PROGRAMMA UTENTE
5
ESEMPIO DI UTILIZZO
6
Tipi di Segnali elettrici Gestiti
DI - Digital Inputs
Ingressi Digitali
Sono segnali proveneinti da
contatti, pulsanti, termostati,
ecc. e che tipicamente hanno
tensione 0 quanto OFF e
tensione +24 Vcc quando ON.
DO - Digital Outputs
Uscite Digitali
Sono i segnali con i quali il PLC
comanda (tramite relé ausiliari
e/o contattori) gli attuatori, quali
motori, elettrovalvole,
segnalazioni, ed altri circuiti
AI - Analog Inputs
Ingressi Analogici
Sono segnali provenienti da trasduttori
di pressione, portata,
o termometri, igrometri, analizzatori
chimici, analizzatori di
Energia Elettrica
Analog Outputs
Uscite Analogiche
Sono segnali atti a pilotare valvole
proporzionali, strumenti
indicatori, registratori, Regolatori di
Velocità per motori
7
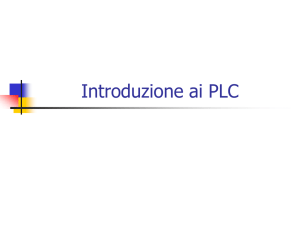
PRINCIPIO DI FUNZIONAMENTO
PLC
S
E
N
S
O
R
I
HARDWARE
SOFTWARE
A
T
T
U
A
T
O
R
I
8
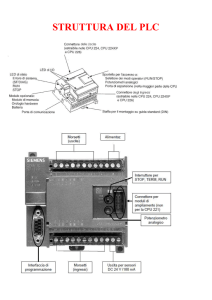
PARTI COSTITUENTI
CPU (CENTRAL PROCESSING UNIT)
È il cuore del PLC, il microprocessore, ovvero il
dispositivo che determina
l'esecuzione del programma, dei calcoli e di tutte le
elaborazioni logiche
Interagisce con la Memoria, i moduli di di I/O e le
periferiche
9
PARTI COSTITUENTI
ALIMENTATORE
Provvede a fornire i corretti livelli di tensione per il
funzionamento dei vari dispositivi elettronici
Esistono diversi modelli, in funzione della tensione di
rete: –110 Vac –230 Vac –24 Vdc
10
PARTI COSTITUENTI
ROM
EPRO
M
MEMORIE
RA
M
EEPRO
M
11
PARTI COSTITUENTI
MEMORIA DATI
E' quella memoria dove vengono memorizzati i valori durante
l'elaborazione
del programma. l'accesso a questa memoria può avvenire per bit, byte,
word o doppie word, ovvero si possono memorizzare valori on/off oppure
valori numerici, o ascii. essendo richiesta un alta velocità di elaborazione,
questa memoria non può che essere di tipo RAM
12
CLASSIFICAZIONE DEI PLC
PLC
Numero I/O
Altre caratteristiche
nano
Max 10
Bassa capacità di
memoria
micro
Max 64
I/O solo digitali
small
Tra 64 e 256
I/O digitali e analogici
Connessione in rete
med
Tra 256 e 2028
Elevata capacità di
memoria Moduli speciali
large
> 2028
Massime prestazioni
13
MODULI INGRESSO DIGITALE
MODULI I/O
Convertono lo stato dell'ingresso
associato in uno stato logico ( 1 - 0 )
interpretabile dalla CPU
14
MODULI USCITA DIGITALI
convertono gli stati logici presenti
nella memoria dati di Output
in segnali elettrici che commutano
fisicamente il punto di uscita
15
MODULI DI COMUNICAZIONE
Permettono il "colloquio" tra l'operatore ed il
PLC
PC
PANNELLO OPERATORE
Permettono la gestione distribuita di I/O
l’integrazione di controllo con altri PLC
l’interfaccia verso l’automazione
Sistema di supervisione o SCADA
(Supervision, Control And Data Acquisition)
16
Linguaggi di programmazione per PLC
IEC1131-3
Function Block Diagram (FBD) : linguaggio grafico
Ladder Diagram (LD) : linguaggio grafico che
impiega la logica a contatti
Sequential Function Chart (SFC) : linguaggio
grafico atto a raffigurare il comportamento del
sistema di controllo in maniera molto intuitiva
Instruction List (IL): linguaggio simile
all’assembler, lista di istruzioni
17
ESEMPI LINGUAGGI
PROGRAMMAZIONE
18
ESEMPI LINGUAGGI
PROGRAMMAZIONE
19
IL LINGUAGGIO LADDER
20
LINGUAGGIO KOP
lo schema a contatti è facilmente utilizzabile anche dai
programmatori poco esperti
la rappresentazione grafica è semplice da interpretare ed
diffusa in tutto il mondo
l’editor KOP può essere utilizzato sia con le operazioni
SIMATIC che con le operazioni IEC 1131-3
i programmi scritti in KOP possono essere sempre
visualizzati con
l’editor AWL SIMATIC.
21
Diagrammi Funzionali - SFC
E‘ un insieme di passi, transizioni e linee di
interconnessione
Ad un passo possono trovarsi associate più azioni o
comandi
La durata di un passo è determinata dal
superamento delle condizioni associate
L’evoluzione è condizionata da una o più
condizioni che devono essere presenti per passare
ad uno stato successivo
22