I.P.S.I.A. Di
BOCCHIGLIERO
a.s. 2012/2013
-classe V-
Materia: Sistemi, automazione e organizzazione della produzione
---- Trasduttori di velocità ----
alunno:
prof. Ing. Zumpano Luigi
Chindamo Michelangelo
IPSIA Bocchigliero
- Sistemi, automazione e organizzazione della produzione -
trasduttori di velocità
________________________________________________________________________________________________
I trasduttori di velocità
I trasduttori di velocità, chiamati anche tachimetri, forniscono un segnale elettrico
proporzionale alla velocità angolare (o lineare). In funzione del principio di funzionamento
possiamo distinguere tra:
– Trasduttori analogici, o dinamo tachimetriche, che sfruttano il principio della dinamo
per la generazione di un forza elettromotrice continua;
– Trasduttori digitali, o tachimetri digitali, che si basano sugli encoder incrementali.
Classificazione del trasduttore
Analogico
Di tensione
Attivo
Diretto
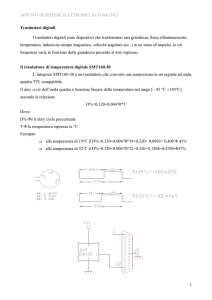
Il trasduttore, di tipo analogico fornisce direttamente una tensione proporzionale alla
velocità angolare e non necessita di una alimentazione esterna. Per illustrare il principio di
funzionamento della dinamo si fa riferimento alla legge della tensione indotta in un
conduttore in movimento all'interno di un campo magnetico. Infatti ai capi di un conduttore
R
Ia
I
I
a
E
B
Vu
E
Vu
Rc
ω
di lunghezza l che si muove con una velocità v all'interno di un campo magnetico
caratterizzato da un induzione B (perpendicolare a v), si genera una d.d.p. e di valore:
e=Blv
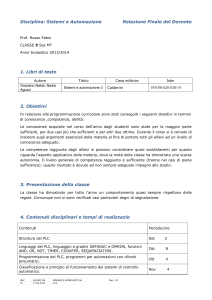
La struttura è riportata in figura : un avvolgimento percorso da una corrente I genera il
campo magnetico all'interno del quale ruota il rotore di cui vogliamo rilevare la velocità
angolare.
________________________________________________________________________________________________
Alunno: Chindamo
anno scolastico 2012/2013
classe V
pag 2 pag 5
IPSIA Bocchigliero
- Sistemi, automazione e organizzazione della produzione -
trasduttori di velocità
________________________________________________________________________________________________
Di conseguenza ai capi dell'avvolgimento del rotore si genera una tensione indotta
continua E:
E=K ω Φ
proporzionale, tramite una costante K che dipende dalle caratteristiche costruttive della
macchina:
– alla velocità angolare μ
– al flusso magnetico induttore prodotto dall'avvolgimento percorso dalla corrente I
(questo flusso potrebbe essere generato da un magnete permanente).
Lavorando a flusso costante (I costante) anche il prodotto K <l> è costante e viene definita
costante tachimetrica KT
K T= K Φ
Di conseguenza la tensione indotta E è proporzionale alla velocità angolare ro del rotore:
E=K T ω
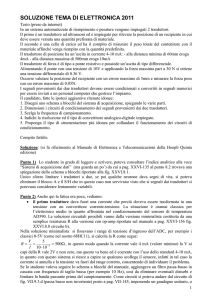
Questo valore è indicato come tensione a vuoto perché, come mostra la figura con il
circuito equivalente della dinamo, dobbiamo considerare la resistenza R dell'avvolgimento
del rotore che provoca una caduta di potenziale RI a quando la dinamo eroga corrente su
un carico:
E
I a=
R+ RC
Di conseguenza la tensione in uscita del dispositivo vale:
V u =E−RI a=K T ω−RI a
Per ottenere una tensione proporzionale alla velocità angolare è necessario poter
trascurare il termine RI a' approssimazione generalmente valida perché il trasduttore
eroga una corrente molto bassa. È possibile comunque diminuire ulteriormente questa
corrente inserendo, dopo il trasduttore, un amplificatore separatore con resistenza
d'ingresso Rin elevatissima e guadagno unitario.
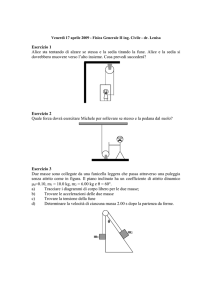
L'andamento della caratteristica velocità angolare (giri/minuto)-tensione (volt) in funzione
della resistenza di carico Re. Le principali caratteristiche della dinamo tachimetrica sono:
– tensione nulla per rotore fermo;
– verso della rotazione indicato dalla polarità della tensione indotta;
– bassa inerzia del dispositivo che non altera la velocità di rotazione da rilevare;
– buona sensibilità (dell'ordine di 0.05 V minuto/giri).
________________________________________________________________________________________________
Alunno: Chindamo
anno scolastico 2012/2013
classe V
pag 3 pag 5
IPSIA Bocchigliero
- Sistemi, automazione e organizzazione della produzione -
trasduttori di velocità
________________________________________________________________________________________________
Vu
R
V
Separatore
E
Rin
+
Vu
a)
Rc1
16
14
12
10
8
6
4
2
Rc2
Rc3
Rc1 > Rc2 > Rc3
u
600 1200 1800 2400 3000
b)
Con KT = 0.05 V minuto/giri otteniamo che per: ro = 100 giri/minuto l'uscita Vu vale
Vu = 0.05 · 100 = 5 V; ro = 300 giri/minuto l'uscita V u vale V u = 0.05 · 300 = 15 V.
La dinamo tachimetrica presenta gli svantaggi della macchina in corrente continua:
usura dei contatti striscianti per rilevare la tensione continua (spazzole); presenza di una
componente alternata sovrapposta a quella continua (ripple); limite per la velocità di
rotazione (qualche migliaia).
Classificazione del trasduttore
Digitale
Di tensione
Passivo
Indiretto
In pratica si tratta di un'applicazione degli encoder incrementali che misurano lo
spostamento angolare: dal rapporto tra l'angolo di rotazione rilevato e il tempo impiegato
per effettuare tale spostamento ricaviamo infatti la velocità di rotazione. Illustriamone
brevemente il funzionamento: supponiamo che il disco contenga m fenditure: in un giro
completo contiamo m impulsi; allora se il numero di impulsi è N significa che sono stati
effettuati N/m giri. Indicando con T il tempo della misura e con ffi la velocità angolare
(giri/minuto) si può esprimere:
60N
ω=
Tm
Se indichiamo con f la frequenza degli impulsi contati, ossia il numero degli impulsi contati
in un secondo, abbiamo f = N/T e possiamo scrivere in modo equivalente:
60f
ω=
m
________________________________________________________________________________________________
Alunno: Chindamo
anno scolastico 2012/2013
classe V
pag 4 pag 5
IPSIA Bocchigliero
- Sistemi, automazione e organizzazione della produzione -
trasduttori di velocità
________________________________________________________________________________________________
T
Base dei tempi
Contatore
encoder
visualizzazione
Trigger
T
T
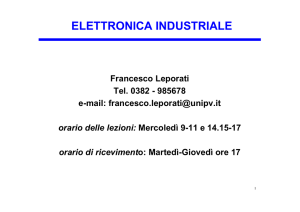
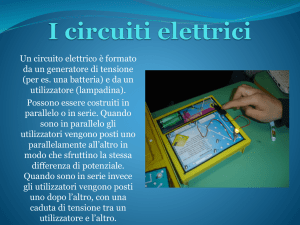
Uno schema di principio per la misura della velocità è riportato
in figura.
Il trigger permette di generare gli impulsi rettangolari che arrivano alla porta AND. Quando
questa porta è abilitata, passano gli impulsi provenienti dall'encoder che vengono
successivamente contati. La porta è abilitata da un segnale alto la cui durata è comandata
dalla base dei tempi. In fase di taratura, della base dei tempi e del sistema di
visualizzazione, si deve fare in modo che il numero di impulsi contati rappresentino la
velocità angolare; matematicamente facendo in modo che il rapporto 60/(Tm) sia pari a l in
modo che risulti numericamente
ω=
60N
=N
Tm
Sempre in fase di taratura si fissa una velocità e si modifica un parametro del sistema di
visualizzazione e della base dei tempi (frequenza del clock) fino a ottenere sullo schermo
la velocità esatta. Per il verso di rotazione si utilizza lo stesso metodo dell'encoder
incrementale per la posizione visto al paragrafo.
________________________________________________________________________________________________
Alunno: Chindamo
anno scolastico 2012/2013
classe V
pag 5 pag 5