SENSORI E TRASDUTTORI
Ogni sistema di controllo automatico dispone di sensori che rilevano le grandezze da controllare.
Grandezza
di input
Grandezza
di output
SENSORE
In molte applicazioni la grandezza fisica di input è trasformata in una grandezza elettrica di
output (tensione) al fine di una utilizzazione più semplice.
temperatura
Sensore
NTC
R
Convertitore
R
V
tensione
trasduttore
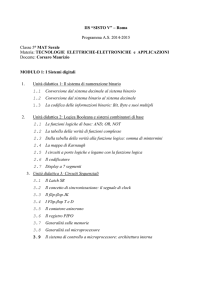
Parametri dei trasduttori
Caratteristica di trasferimento
y
y=f (u)
relazione in/out
u
caratteristiche lineari senza e con offset
Linearità
y
Errore di linearità = max scostamento
fra caratteristica reale
e caratteristica ideale (retta)
errore
u
L%
Range di funzionamento
Range = umax - umin
1
y max
100
y FS
Sensibilità S
y
y
S
u
2
1
S2>S1
u
Tempo di risposta
la sensibilità è nel punto considerato
dy
la derivata S
du
risposta
y
ingresso
tempo di
risposta
t
Isteresi
y
La caratteristica non è univoca.
L’uscita y dipende non dal solo ingresso, ma anche da
come è raggiunta.
u
Risoluzione
Uscita minima rilevabile
100
Risoluzione % =
Uscita di fondo scala
R%
y min
100
y FS
Requisiti di un buon trasduttore
Caratteristica di trasferimento lineare
Range ampio
Sensibilità alta
Risoluzione bassa
Risposta istantanea
Isteresi assente
Classificazione dei trasduttori
Trasduttori passivi
Necessitano di una fonte di energia esterna per avere in uscita un segnale elettrico.
Trasduttori attivi
Hanno in uscita un segnale elettrico senza dover richiedere energia esterna.
Trasduttori analogici
La caratteristica di trasferimento è una funzione continua.
Hanno in uscita un insieme di valori infiniti.
Trasduttori digitali
Hanno in uscita un insieme di valori finiti.
2
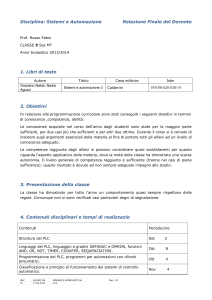
Linearizzazione della caratteristica di trasferimento
R
V
V
caratt. ideale
lux
luce
lux
lux
tensione
Fotoresistenza
(sensore)
convertitore
linearizzazione
I0
trasduttore
R
RL
T
V
E
R
V
TM Tmin
2
V1 Vm Vmin
Tm
Rmin
E
RL Rmin
V2 VM Vm
Vmin
Vm
Rm
E
RL Rm
VM
RM
E
RL RM
ponendo V2 V1 e sviluppando si ottiene per la resistenza di linearizzazione:
R ( R RM ) 2 Rmin RM
RL m min
Rmin RM 2 Rm
3
V
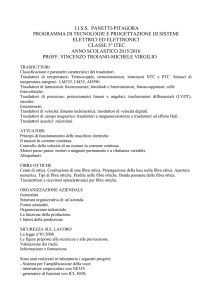
TRASDUTTORI DI TEMPERATURA
Termoresistenza RTD (PT100)
Sono leghe metalliche
RT R0 (1 T ) con R0=100Ω
α=3,85×10-3 [ °C-1 ]
RTD
PT100
V
E
R
V
R1
R
La conversione R/V con generatore di corrente ideale produce una caratteristica lineare, ma con
offset.
V (T ) RT I 0
Il ponte tarato con R1=100Ω per T=0°C produce una caratteristica meno lineare, ma senza offset
RT R1
V (T )
E
2( R1 RT )
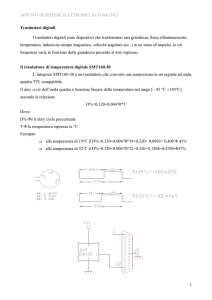
Termistori
Sono semiconduttori PTC (α>0) e NTC (α<0)
NTC: RT R0e
B
T0 T
T0T
con B=3950K R0: resistenza alla temperatura di riferimento T0
Schema semplificato di un controllo di temperatura ON/OFF. Il led si illumina quando la ventola si
accende per T > 50°C
R1=2.84kΩ in quanto dalle specifiche (NTC)50=2.84 kΩ
4
Termocoppia
E’ attivo in quanto non richiede sorgenti di alimentazione. Si fonda sull’effetto Seebeck per cui due
metalli diversi saldati ad una estremità producono una fem che dipende dalla temperatura del
giunto.
rame
Jc
V
costantana
JF
V= α(TC-TF)
Tc: temperatura del giunto caldo Jc
TF: temperatura del giunto freddo JF
α: coefficiente di Seebeck [μV/°C]
Se TF=0 (ad esempio ponendolo in un bagno di ghiaccio)
V= αTC
Poiché V dipende dalla temperatura della giunzione calda, ma anche dalla temperatura della
giunzione fredda che si forma nel cavetto di collegamento con il voltmetro, oggigiorno invece del
bagno in ghiaccio, si usa un integrato che compensa la fem dovuta al giunto freddo con una ugual
fem di verso contrario
TRASDUTTORI DI POSIZIONE
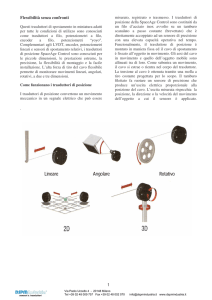
Trasduttore non lineare
Trasduttore lineare
Il cursore indica la posizione espressa da xR con 0 ≤x≤ 1 ed Rc rappresenta il carico del trasduttore.
Gli schemi di base sono gli stessi sia per il lineare, sia per l’angolare, ma con rispettivamente
potenziometro lineare e potenziometro angolare.
5
TRASDUTTORI DI LUMINOSITA’
Fotoresistore (costituiti da materiali semiconduttori)
La resistenza diminuisce all’aumentare dell’irraggiamento.
R=A×E-α
A: costante geometrica
E: illuminamento (flusso luminoso per unità di superficie)
α: dipende dalla tecnologia ed è minore di 1
Fotodiodi
Sono costituiti da una giunzione pn polarizzata inversamente, e producono una corrente inversa
direttamente proporzionale all’irraggiamento.
TRASDUTTORI DI VELOCITA’
Dinamo tachimetrica
E’ una macchina elettrica che trasforma una velocità angolare in una tensione continua.
V=K×ω
con K[Vs/rad]
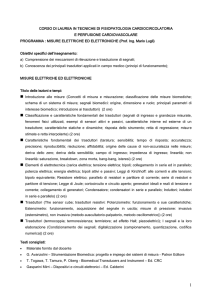
Encoder ottico
Converte la posizione angolare del suo asse rotante in un segnale di tipo digitale
Il dispositivo si compone di due parti:
- una, un disco di materiale plastico costituito da corone circolari che recano tracce
trasparenti, è solidale con l’asse di cui si vuole misurare lo spostamento angolare.
- l’altra fissa, solidale con l’involucro del dispositivo, che contiene una sorgente di luce e dei
fosensori
Il disco è costituito da due corone sfasate di un quarto di periodo, ognuna di N fori a distanza uguale
f
N
60
f: frequenza del segnale di uscita
N: numero di fori sul disco
ω: velocità angolare
6