DINAMICA
ESERCIZIO 1
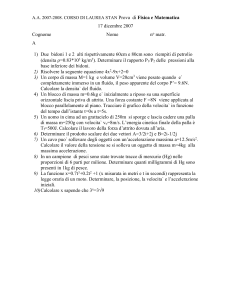
Un saliscendi formato da due carrucole solleva una massa M 2 (appesa ad una carrucola mobile)
utilizzando la massa M1 = 50 kg (appesa ad una carrucola fissa). a) Nell’ipotesi che la massa M1
scenda a velocità costante, calcolare il valore di M2 e la tensione nella fune T ; b) se il carico di
rottura della fune che sostiene M1 è Tmax = 400 N, calcolare il valore massimo della massa M 2 che
è possibile sollevare, e le accelerazioni delle due masse in questo caso.
ESERCIZIO 2
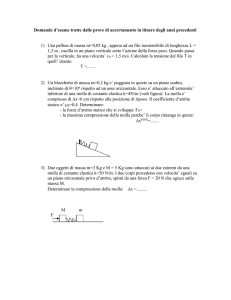
Alla sommità di un doppio piano inclinato liscio è fissata una carrucola senza massa, su cui scorre
senza attrito una fune inestensibile senza massa. Alle due estremità della fune sono attaccati due
corpi di massa m1 = m e m2 = 2m, come indicato in figura. Se β = 30◦ calcolare: a) l’angolo α
affinché il sistema si muova con un’accelerazione di modulo pari ad a = g/9; b) la tensione della
fune se m = 1 kg.
1
ESERCIZIO 3
Un pendolo conico è costituito da un punto materiale di massa m = 6 g legato a una fune lunga
l = 25 cm fissa ad un estremo. Il pendolo descrive una circonferenza orizzontale con velocità angolare ω0 = 7 rad/s. Calcolare: a) il valore della tensione della fune; b) il raggio della circonferenza;
c) la massima apertura per un carico di rottura T = 117.6 ×10−3 N e la velocità angolare massima.
ESERCIZIO 4
Un corpo di massa m = 1 kg in quiete su un piano scabro viene colpito obliquamente da un martello
con un impulso di modulo pari a J = 14 Ns. Dopo essersi messo in moto orizzontalmente, l’oggetto
si ferma dopo un tratto ∆s = 8 m. Sapendo che il coefficiente d’attrito dinamico è µd = 5/8 calcolare: a) l’impulso J del martello; b) la direzione rispetto all’orizzontale con cui il martello colpisce
il corpo. Si consideri trascurabile la forza di attrito statico esercitata dal piano durante l’impatto
tra il corpo e il martello.
ESERCIZIO 5
Una sferetta di massa m = 120 g ruota con velocità angolare ω = 3.4 rad/s su un piano orizzontale.
La sfera è tenuta sulla traiettoria circolare da una molla di lunghezza a riposo l = 12 cm e costante
elastica k = 15 N/m. Determinare il raggio della circonferenza.
ESERCIZIO 6
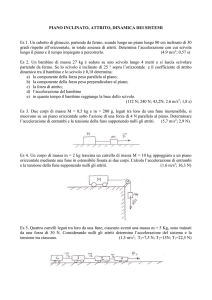
I tre blocchi A, B e C, inizialmente fermi, sono collegati da due funi inestensibili e di massa
trascurabile come in figura. I blocchi A e C si trovano su due piani inclinati di un angolo di α = 30 ◦ .
A si trova su un piano liscio mentre C su un piano scabro. B si trova su un piano orizzontale liscio.
Sapendo che le masse dei corpi sono MA = 120 kg, MB = 50 kg e MC = 100 kg, e che i moduli
delle due tensioni sono legati dalla relazione TAB = 3/2TBC , calcolare: l’accelerazione del sistema,
le tensioni delle funi e il coefficiente d’attrito µ del piano su cui giace C.
ESERCIZIO 7
Una macchina di Atwood è realizzata collegando le masse 1, 2 e 3 come in figura (m 1 = 2 kg,
m2 = 1 kg). La carrucola è ideale. Nella condizione iniziale le masse 1 e 2 salgono mentre la massa
3 scende con velocità costante. Ad un certo punto la massa 2 si stacca. Calcolare l’accelerazione
delle restanti masse.
2
ESERCIZIO 8
Una boccola di massa M = 2.2 kg scivola su un asse verticale scabro che genera un attrito dinamico
descritto dal coefficiente µd = 0.10. L’intensità F della forza premente può essere regolata agendo
sulla vite laterale. Determinare il valore di F affinché la boccola scivoli con accelerazione pari a
1/3g.
ESERCIZIO 9
Un corpo di massa m = 1.9 kg si trova su un piano orizzontale scabro. Siano µs = 0.3 e µd = 0.15
rispettivamente i coefficienti d’attrito statico e dinamico. Se il corpo è inizialmente fermo, si determini il valore minimo di una forza orientata orizzontalmente che permette di metterlo in movimento. Supponendo che la forza continui a spingere il corpo, determinare la velocità v che il corpo
acquisisce dopo un tempo t = 2.4s.
ESERCIZIO 10
Due blocchi di massa m1 = 12 kg e m2 = 5 kg legati tra loro da una fune ideale vengono lasciati
cadere lungo
un piano inclinato di angolo α = 30 ◦ . Il coefficiente di attrito fra m1 e il piano è
√
µ1 = 1/ 3. La fune, inestensibile e di massa trascurabile, rimane sempre tesa con tensione pari
a T = 6 N. Determinare: a) quale dei due è il blocco trainato, b) l’accelerazione del sistema, c) il
coefficiente d’attrito fra m2 e il piano.
ESERCIZIO 11
Un oggetto puntiforme di massa m = 0.5 kg viene lanciato con velocità v 0 = 6 m/s in direzione
radiale dal bordo di una giostra di raggio r = 4 m verso il centro di essa. Con la giostra ferma,
l’oggetto si ferma dopo 1 s. a) Calcolare il coefficiente d’attrito. Successivamente, si pone la giostra in rotazione con velocità angolare di 2 rad/s e l’oggetto resta nella posizione raggiunta sulla
giostra. b) Calcolare il modulo della reazione vincolare esercitata dalla giostra sulla massa m.
3
SOLUZIONI
ESERCIZIO 1
In figura sono mostrate tutte le forze in gioco agenti sia sulle due masse che sulle due carrucole.
Per prima cosa bisogna scrivere l’equazione della dinamica nel caso generale per i due corpi separatamente e poi proiettarla lungo l’unica direzione che ci interessa, quella verticale. Cosi’ facendo
si ottiene:
tot
P1 + T1 = M1a1
F = M1a1
−M1 g + T1 = M1 a1
1
F tot = M2a2 ⇒
P2 + T2 = M2a2 ⇒
−M
2 g + T2 = M2 a2
2
ove si è scelto l’alto come verso positivo e, come sarà anche per gli esercizi seguenti, abbiamo
indicato con T1 = |T1 |, T2 = |T2 |, e P1 = |P1 | = M1 g, P2 = |P2 | = M2 g. Si noti che le accelerazioni
a1 e a2 possono anche essere negative. Poichè la carrucola 2 ha massa nulla, la risultante delle
forze agenti su di essa deve annullarsi:
T1 = T
T1 + T1 + T2 = 0 ∗a2 = 0 ⇒ T1 + T1 − T2 = 0 ⇒ T2 = 2T1 ⇒
T2 = 2T
Inoltre è possibile ottenere una relazione che lega le due accelerazioni da considerazioni che legano
gli spazi percorsi dalle due masse. Infatti, essendo la fune inestensibile, ad uno spostamento verso il
basso di un tratto di lunghezza ∆l(> 0) da parte di M 1 , corrisponde un tratto della stessa lunghezza
che deve essere sottratto alla parte di fune che avvolge la carrucola 2; la carrucola 2 quindi si sposta
verso l’alto di un percorso pari a ∆l
2 , poiché è sostenuta da due tratti di fune. Supponendo nulle
4
tutte le condizioni iniziali e ricordandoci che si tratta di un moto uniformemente accelerato (quindi
vale s = at 2/2), si ha:
1
1
∆h1 = −∆l
⇒ ∆h1 = −2∆h2 ⇒ a1 ∆t 2 = −2 a2 ∆t 2 ⇒
∆l
∆h2 = 2
2
2
a2 = a
a1 = −2a2 ⇒
a1 = −2a
da cui si deduce che le due accelerazioni hanno sempre verso opposto. Riscriviamo quindi il
sistema con le equazioni del moto per i due corpi (sostituendovi T ed a) come:
T − M1 g = −2M1 a
2T − M2 g = M2 a
e passiamo alla risoluzione dei due casi in esame.
a) Se la massa M1 scende a velocità costante, significa che le accelerazioni sono entrambe nulle,
quindi a = 0. Il sistema diventa quindi:
T − M1 g = 0
T = M1 g = 50 kg ∗ 9.8 m/s2 = 490 N
⇒
2T − M2 g = 0
2M1 g − M2 g = 0 ⇒ M2 = 2M1 = 100 kg
b) Il valore massimo M2max della massa sollevabile si ottiene sostituendo nel sistema con le equazioni
del moto il valore massimo della tensione Tmax . Il sistema diventa quindi:
max
a = g2 − T2M
= 0.9 m/s2
Tmax − M1 g = −2M1 a
1
⇒
g
Tmax
max
max
2Tmax − M2max g = M2max a
2Tmax = M2
2 − 2M1 + M2 g
Avremo quindi che la massa M2 è soggetta a un’accelerazione pari a a2 = a = 0.9 m/s2 (diretta
verso l’alto) mentre per M1 sarà pari a a1 = −2a = −1.8 m/s2 (diretta verso il basso).
Risolvendo la seconda equazione del sistema si ha
M2max
3 max
4Tmax
M2 g −
Tmax = 2Tmax ⇒ M2max =
74.8 kg
2
2M1
3g − TMmax
1
5
ESERCIZIO 2
In figura sono mostrate le forze applicate ad entrambi i corpi. Scriviamo le equazioni della dinamica separatamente per i due corpi, e le proiettiamo poi lungo gli assi perpendicolare e parallelo al
piano; scegliamo come orientazione positiva per gli assi paralleli al piano il verso corrispondente
al movimento verso destra (cioè con m1 che scende).
1) R1 + T1 + P1 = m1a1
2) R2 + T2 + P2 = m2a2
1 ) − T + mg sin α = ma
1
)
−
T
+
P
sin
α
=
m
a
1
1
1
1⊥ ) − P1 cos α + R1 = 0
1⊥ ) − mg cos α + R1 = 0
⇒
⇒
2 ) T2 − P2 sin β = m2 a
2 ) T − 2mg sin β = 2ma
2⊥ ) − P2 cos β + R2 = 0
2⊥ ) − 2mg cos β + R2 = 0
dove si è tenuto conto che m1 = m e m2 = 2m e che essendo la fune ideale si ha T1 = T2 = T . Si
deve tenere presente che non è noto il segno di a, perché non si conosce il verso del movimento
del sistema.
a) Sostituiamo ora il valore dell’accelerazione: non conoscendo il segno dobbiamo considerare
entrambe le possibilità e porre a = ±g/9. Sommando l’equazione 1 ) e la 2 ) ricavo sin α:
g
mg sin α − 2mg sin β = ma + 2ma ⇒ mg(sinα − 2 sin β) = 3m ±
⇒
9
1
1
1
1
sin α = ± + 2 sin β = ± + 2 ∗ ⇒ sin α = 1 ±
3
3
2
3
Il risultato con il segno “+” è impossibile: quindi l’accelerazione è diretta verso sinistra (m 1 sale),
ed avremo a = −g/9. Si ricava quindi per l’angolo richiesto:
2
2
⇒ α = arcsin 41.8◦
3
3
b) Possiamo ricavare la tensione della fune dall’equazione 1 ):
sin α =
1
7
7
2
T = mg sin α − ma = mg + mg = mg = ∗ (1 kg) ∗ (9.8 m/s2 ) 7.62 N
3
9
9
9
6
ESERCIZIO 3
In figura sono mostrate le forze agenti sul corpo che costituisce il pendolo. Fissiamo un SdR
centrato sul punto materiale e definito dal versore k̂ con direzione verticale e orientato verso l’alto,
e dal versore n̂ orientato in direzione normale alla traiettoria (quindi orizzontale) e diretto verso il
centro. Scriviamo l’equazione della dinamica del punto materiale e proiettiamola lungo i due assi
n̂) T sin α = man
T + P = ma ⇒
k̂) T cos α − mg = mak
Poichè il punto si muove orizzontalmente si ha che a k = 0. Inoltre, essendo il moto nel piano
orizzontale un moto circolare uniforme, l’accelerazione lungo n̂ sarà legata alla velocità angolare.
Avremo quindi che
a = an n̂ = ω20 R n̂ = ω2 l sin α n̂
Il sistema diventa quindi
n̂) T sin α = mω2 l sin α ⇒ T = mω2 l
k̂) T cos α = mg
a) È possibile risolvere il sistema nelle due incognite T e α inserendo il valore di ω = ω 0
2
−3
T = mω20 l = (6 × 10−3 kg) ∗ (7 rad/s)
∗ (0.25 m) = 73.5 × 10 N
g
g
◦
cos α = mg
T = ω2 l ⇒ α = arccos ω2 l = arccos(0.8) 37
0
0
7
b) Dopo aver osservato che R = l sin α, per ottenere
il valore di α dall’espressione
R posso
calcolare
g
precedente ed effettuare il calcolo come R = l sin arccos ω2 l . È però possibile ottenere un’espressione
0
più semplice elevando al quadrato le due equazioni n̂) e k̂) (prima di semplificare sin α) e sommandole:
T 2 (sin α)2 + T 2 (cos α)2 = m2 ω40 R2 + m2 g2 ⇒
T 2 − m2 g 2
m2 ω40 R2 = T 2 − m2 g2 ⇒ R =
m2 ω40
Sostituendo T = mω20 l si ottiene
R=
m2 ω40 l 2 − m2 g2
=
m2 ω40
l2 −
g2
= 0.15 m
ω40
c) L’angolo α di apertura massimo e la velocità angolare ω massima si ottengono sostituendo
nelle n̂) e k̂) il carico di rottura T = T
ω = T 8.85 rad/s
2
T = mω l
ml ⇒
T cos α = mg
α = arccos mg = arccos 1 = 60◦
T
2
ESERCIZIO 4
In figura sono segnate le forze che agiscono sull’oggetto: si tenga presente che le forze non agiscono simultaneamente.
8
Analizziamo la fase di impatto del martello. Esprimiamo l’impulso in forma vettoriale come
J = Jx î + J y j.ˆ Per il teorema dell’impulso si ha J = ∆q. Non essendoci moto lungo la direzione
verticale1 ed essendo trascurabile la forza di attrito statico, il teorema si può riscrivere come
Jx = ∆qx = m(v1 − v0 ) = mv1
dove si è tenuto conto che v0 = 0. Poiché m è nota sarà sufficiente calcolare v1 per ottenere Jx e,
infine, Jy dal modulo.
Analizziamo ora la fase in cui il corpo è in moto. Possiamo scrivere l’equazione della dinamica
prima in forma vettoriale e poi proiettarla lungo le due direzioni verticale e orizzontale in modo da
ricavare l’accelerazione a cui è sottoposto il corpo:
x) − Fattr = ma
R + P + Fattr = ma ⇒
⇒
y) R − mg = 0
y) R = mg
⇒ −µd mg = ma ⇒ a = −µd g
x) − µd R = ma
Il corpo è quindi soggetto a una decelerazione partendo con velocità iniziale pari a v 1 . Scriviamo
le equazioni del moto uniformemente accelerato per spazio e velocità:
∆x = 12 a∆t 2 + v1 ∆t
v = v1 + a∆t
Sostituendo le quantità note per l’istante di arresto si ottiene v 1 :
∆t = µvd1g
∆s = v1 ∆t − 12 µd g∆t 2
⇒
v2
0 = v1 − µd g∆t
∆s = µvd1g ∗ v1 − 12 µd g ∗ µ2 1g2 =
d
2
1 v1
2 µd g
⇒ v1 =
2µd g∆s
Possiamo quindi sostituire questo risultato nell’equazione del teorema dell’impulso
Jx = mv1 = m 2µd g∆s 9.9 Ns
Conoscendo il modulo J ricaviamo anche Jy :
Jy = − J 2 − Jx2 − (14 Ns)2 − (9.9 Ns)2 −9.9 Ns
dove il segno “-” compare perché abbiamo scelto l’alto come verso positivo.
la precisione, cioò che avviene in un caso di questo tipo è che durante l’impatto la reazione vincolare R
aumenta d’intensità compensando il componente verticale di F.
1 Per
9
La direzione da cui proviene l’impulso si ottiene calcolando
tan θ =
|Jy| 9.9
1 ⇒ θ 45◦
|Jx| 9.9
ESERCIZIO 5
L’unica forza in gioco che agisce sulla sfera è la forza di richiamo elastica diretta verso il centro
della circonferenza. L’equazione della dinamica è quindi
Fel = ma
La forza elastica sarà diretta verso il centro ed opposta all’allungamento della molla
Fel = −k∆l
Inoltre, essendo il moto circolare uniforme, l’accelerazione è un’accelerazione centripeta, ed è
quindi legata al raggio R da:
a = −ω2R
ove R = Rr̂ con R > 0 ed r̂ è il versore radiale (di verso uscente dal centro O). Unendo le due
relazioni trovate si ottiene:
= −mω2R ⇒ −k∆l r̂ = −mω2 R r̂.
−k∆l
Prendendo le parti scalari dell’equazione qui sopra, e notando che ∆l = R − l, si ottiene:
k(R − l) = mω2 R ⇒ kR − mω2 R = kl ⇒ R =
10
kl
0.132 m
k − mω2
ESERCIZIO 6
In figura sono riportate le forze agenti su ogni corpo. Scriviamo l’equazione della dinamica per i
tre corpi:
A) TAB + RA + PA = MA aA
B) TAB + TBC + RB + PB = MB aB
C) TBC + RC + PC + Fattr = MC aC
Essendo i corpi legati dalle funi, l’accelerazione avrà lo stesso modulo per i tre corpi e sarà sempre
diretta lungo la direzione parallela al piano. Fissiamo come verso positivo quello dello spostamento
verso destra e proiettiamo le equazioni lungo le direzioni parallele e perpendicolare ai piani:
A ) TAB − MA g sin α = MA a
A
⊥ ) RA − MA g cos α = 0
B ) − TAB + TBC = MB a
B ⊥ ) R B − MB g = 0
C
) − TBC − MC g sin α + Fattr = MC a
C⊥ ) RC − MC g cos α = 0
Poiché i corpi A e C tenderanno a scendere dovremo avere che a < 0. Inoltre la forza di attrito
esercitata su C sarà diretta verso destra come indicato in figura, e in modulo sarà pari a Fattr = µRC ,
valore che possiamo sostituire nella C ).
Alcune equazioni non servono a trovare i risultati cercati e le eliminiamo. Dalla C ⊥ ) ricaviamo il
valore di RC che sostituiamo nella C ). Aggiungiamo, infine, la relazione sulle tensioni data dal
testo per ottenere:
A ) TAB − MA g sin α = MA a
B ) − TAB + TBC = MB a
C ) − TBC − MC g sin α + µMC g cos α = MC a
TAB = 32 TBC
11
che è un sistema di 4 equazioni con le 4 incognite richieste dal problema. Trattandosi
di un sistema
√
difficile da risolvere, conviene sostituire i valori di sinα = 1/2 e cos α = 3/2. Presentiamo qui
invece la soluzione completa senza sostituzioni:
TAB = 3/2TBC
TAB = 32 TBC
3
TBC = 23 MA (a + g sinα)
2 TBC = MA (a + g sin α)
⇒
3
T = −2MB a
− T + TBC = MB a
2 BC
BC
µMC g cos α = MC a + TBC + MC g sin α
µMC g cos α = MC a − 2MB a + MC g sin α
TAB = 32 (−2MB a) = −3MB a
T = −2M a
BC
B
⇒
2
a
=
−2M
B
3 MA (a + g sin α)
µ = (MC −2MB )a + tan α
MC g cos α
È possibile ricavare a dalla terza equazione:
1
1
−MB a = MA a + MA g sin α ⇒
3
3
1
1
MA + MB a = − MA g sin α ⇒
3
3
MA
g sin α −2.18 m/s2
MA + 3MB
Le altre tre quantità si ottengono sostituendo a:
A MB
TAB = M3M
g sin α 326.67 N
+3M
B
A
A MB
TBC = M2M
g sin α 217.78 N
A +3MB
µ = MA (2MB −MC ) tan α + tan α = MB (2MA +3MC ) tan α = tan α =
M (M +3MB )
M (M +3MB )
a=−
C
A
C
A
√1
3
Per il calcolo di µ, si osservi come sostituendo le masse si ottiene che il termine di frazione è pari
a 1.
12
ESERCIZIO 7
In figura sono riportate le forze che agiscono su ogni massa. Possiamo ricavare la massa m 3 dalle
equazioni della dinamica. In questa configurazione m1 e m2 salgono mentre m3 scende, tutte con
velocità costanti, quindi le accelerazioni saranno nulle:
1) P1 + T1 + T2 = M1 a1 = 0
2) P2 + T2 = M2 a2 = 0
3) P3 + T3 = M3 a3 = 0
Proietto le equazioni lungo la direzione verticale fissando come verso positivo quello della discesa
del corpo 3:
2) T2 = M2 g
1) − M1 g + T1 − T2 = 0
2) − M2 g + T2 = 0
1) − M1 g + T1 − M2 g = 0 ⇒ T1 = M1 g + M2 g
⇒
3) M3 g − T3 = 0
3) T3 = M3 g
La carrucola è ideale quindi T1 = T3 . Si ha quindi che
M1 g + M2 g = M3 g ⇒ M3 = M1 + M2 = 3 kg
Quando la massa m2 si stacca cambiano le equazioni della dinamica per i due corpi rimanenti.
Mantenendo lo stesso verso positivo avremo:
1) P1 + T1 = m1 a1
3) P3 + T3 = m3 a2
13
Le accelerazioni avranno lo stesso modulo a1 = a3 = a, e anche le tensioni T1 = T3 = T , quindi:
−M1 g + T = M1 a
T = M1 a + M1 g
⇒
⇒
M3 g − T = M3 a
M3 g − M 1 a − M 1 g = M 3 a
g(M3 − M1 )
= 1.96 m/s2
M1 + M3
Essendo a > 0 si ha che m3 scende e m1 sale.
a=
ESERCIZIO 8
In figura è disegnata schematicamente la boccola e le forze che agiscono su di essa. Si deve scrivere
l’equazione della dinamica e proiettarla lungo le due direzioni del sistema di riferimento scelto. Si
noti che il moto avviene solo lungo l’asse verticale (a x = 0) e che l’accelerazione deve essere
diretta verso il basso, quindi a y = −g/3.
F + R + Fattr + P = ma ⇒
x) − F + R = 0
y) − mg + Fattr = −m g3
⇒
x) R = F y) µd R = 1 − 13 mg = 23 mg
Sostituendo R nella y):
2mg 2 ∗ (2.2 kg) ∗ (9.8 m/s2 )
2
= 143.73 N
=
µd F = mg ⇒ F =
3
3µd
3 ∗ 0.1
14
ESERCIZIO 9
In figura sono evidenziate le forze agenti sul corpo, con Fattr che rappresenta l’attrito statico
all’inizio e dinamico alla fine. Prima che il corpo si muova si tratta di un problema di statica
(l’accelerazione del corpo è nulla) e da questa condizione siamo in grado di ricavare il valore di F:
F + R + Fa,s + P = 0 ⇒
x) F − Fa,s = 0
⇒
y) R − mg = 0
y) R = mg
x) F = Fa,s = µs R = µs mg 5.59 N
Quando il corpo inizia muoversi l’equazione della dinamica diventa
x) F − Fa,d = ma
y) R = mg
F + R + Fa,d + P = ma ⇒
⇒
y) R − mg = 0
x) µs mg − µd R = ma
Sostituendo R nella x) si ottiene l’accelerazione:
µs mg − µd mg
= (µs − µd )g = (0.3 − 0.15) ∗ 9.8 m/s2 = 1.47 m/s2
m
Avendo trovato l’accelerazione, uso l’equazione del moto uniformemente accelerato per trovare la
velocità raggiunta dopo un tempo ∆t:
a=
v = v0 + a∆t = (µs − µd )g∆t 3.53 m/s
15
ESERCIZIO 10
Non sappiamo quale dei due corpi si trovi in basso e quale in alto, sappiamo solo che i corpi
scendono con uguale accelerazione. In figura sono mostrati il caso (A) in cui m 1 traina m2 e il
caso opposto (B), e le forze agenti nei due casi: vista la configurazione del sistema esso deve
avere un’accelerazione diretta a far scendere le due masse. Scriviamo l’equazione della dinamica
separatamente per i due corpi
1) P1 + R1 + T1 + Fa,1 = m1a
2) P2 + R2 + T2 + Fa,2 = m2a
a) Analizziamo il caso (A) e proiettiamo le due equazioni lungo le direzioni parallela al piano, x, e
perpendicolare, y. Scegliamo per entrambi il verso positivo come quello di salita. Essendo la fune
ideale si ha che T1 = T2 = T . Quindi si ottiene:
1x)
−
m
1y) R1 = m1 g cos α
g
sin
α
+
T
+
F
=
m
a
1
a,1
1
1y) R1 − m1 g cos α = 0
2y) R2 = m2 g cos α
(A)
⇒
2x) − m2 g sin α − T + Fa,2 = m2 a
1x) − m1 g sin α + T + µ1 R1 = m1 a
2y) R2 − m2 g cos α = 0
2x) − m2 g sin α − T + µ2 R2 = m2 a
1x) − m1 g sin α + T + µ1 m1 g cos α = m1 a
⇒
2x) − m2 g sin α − T + µ2 m2 g cos α = m2 a
Dalla 1x) otteniamo l’accelerazione a:
1x) a = g(µ1 cos α − sin α) +
16
T
m1
Sostituendo i dati ed eseguendo il calcolo otteniamo che il termine tra parentesi si annulla:
√
3 1 1 1
1
− = − =0
µ1 cos α − sin α = √ ∗
2 2 2
3 2
e che quindi
T
m1
Abbiamo ottenuto un’accelerazione positiva, che vorrebbe dire che il sistema si muove verso l’alto,
il che è impossibile. Quindi l’assunzione per cui sia m 1 il blocco che traina e m2 quello trainato è
sbagliata: si ha quindi che m1 è trainato e m2 traina, come indicato nel caso (B).
a=
b) Riscrivendo il sistema nel caso (B)
1x) − m1 g sin α − T + Fa,1 = m1 a
1y) R1 − m1 g cos α = 0
(B)
2x) − m2 g sin α + T + Fa,2 = m2 a
2y) R2 − m2 g cos α = 0
si osserva che esso si ottiene da quello del caso (A) sostituendo T con −T . Si avrà quindi che
a=−
T
= −0.5 m/s2
m1
c) Possiamo ottenere il valore di µ2 dalla 2x) dopo aver inserito il valore di a:
2x) − m2 g sin α + T + µ2 m2 g cos α = −m2
T
⇒
m1
m2
µ2 m2 g cos α = m2 g sin α − 1 +
T ⇒
m1
m2
T
0.377
µ2 = tan α − 1 +
m1 m2 g cos α
Si noti come il corpo che traina non sia necessariamente quello più pesante; in questo caso è quello
con coefficiente di attrito minore.
ESERCIZIO 11
a) Scriviamo l’equazione della dinamica per l’oggetto lanciato e la proiettiamo lungo i due assi x
orizzontale e y verticale. Fissiamo l’origine del sistema coincidente con la posizione iniziale del
corpo e scegliamo come verso positivo per la x quello concorde con la velocità iniziale. Le forze
in gioco agenti sulla massa sono la sua forza peso, la reazione vincolare e la forza di attrito:
17
P + R
0 + Fattr = ma ⇒
x) − Fattr = ma
⇒
y) − mg + R0 = 0
y) R0 = mg
⇒ a = −µg
x) − µR0 = −µmg = ma
Il corpo si muove quindi di moto uniformemente decelerato. Utilizzando l’equazione della velocità
per il moto uniformemente accelerato (con a = −µg) e imponendo che all’istante t1 = 1 s si ha
v(t1 ) = v1 = 0, è possibile ricavare il coefficiente di attrito richiesto:
v1 = v0 + at1 ⇒ 0 = v0 − µgt1 ⇒ µ =
v0
6 m/s
0.612
=
gt1 9.8 m/s2 ∗ 1 s
b) Quando la giostra è in rotazione il punto materiale che rimane fisso sulla giostra descrive un
moto circolare uniforme, con velocità angolare nota ω1 = 2 rad/s. Il corpo è quindi soggetto a
una forza centripeta orizzontale esercitata dall’attrito con la superficie della giostra. Tale forza dà
luogo a un’accelerazione pari a
ac = ω20 r1 î
dove r1 è la distanza del corpo dal centro e î è normale alla traiettoria circolare, diretto verso il
centro della giostra. In questa nuova configurazione l’equazione della dinamica del corpo sarà
quindi:
P + R1 = mac .
La reazione vincolare R1 puó quindi essere ottenuta come differenza tra la forza centripeta mac e
il peso P del corpo:
R1 = mac − P = mω20 r1 î + mg jˆ
Per ottenere il valore di r1 occorre tornare al punto a) precedente, e utilizzare l’equazione oraria
del moto uniformemente accelerato:
1
x(t) = v0t − µgt2
2
dalla quale ricaviamo la posizione all’istante t 1 :
1
1 v0 2 1
x1 = x(t1 ) = v0t1 − µgt12 = v0t1 −
gt = v0t1
2
2 gt1 1 2
e, infine, la distanza dal centro come
1
r1 = r − x1 = r − v0t1 = 1 m.
2
Possiamo quindi ottenere il modulo della reazione vincolare
2
1
2
4
2
2
R1 = (mω0 r1 ) + (mg) = m ω0 r − v0t1 + g2 9.38 N
2
18